
大范围作业数控型二自由度并联操作手及其运动特性的研究
2010-05-31 09:56:20沈惠平邓嘉鸣刘善淑
中国机械工程 2010年22期
沈惠平 丁 磊 邓嘉鸣 李 菊 刘善淑
常州大学,常州,213016
0 引言
少自由度平面并联机构因具有结构简单、操作容易、制造成本低等特点,在实际应用中受到学术界和工业界的重视,但目前国内外对二滑块驱动平面并联机构的研究相对较少,高峰[1]提出了一种二滑块位于同一直线上的倒梯形RPRPR机构,王海东[2]对该机构的工作空间进行了分析,刘辛军等[3]分析了其运动学、奇异性及工作空间,张顺心等[4]对其精度进行分析并将其设计为模块化并联机床,王冰等[5]对其进行了尺度综合。高铁红等[6]提出了一种操作点在二平行导轨之间的二自由度平面并联机构,并对其进行了运动学分析,现此机构已用于齐齐哈尔二机床(集团)有限责任公司的并联机床上。本文提出一种二平行导轨二滑块驱动在一侧的可变杆长平面并联机构,二滑块所在的固定导轨的间距始终为二连杆长度之差,二连杆长度均可调节,当二滑块沿导轨分别作往复直线移动时,可使末端执行器操作点P在xoy平面内做任意平面曲线运动,以实现各种产业操作工艺。若在末端执行器上加一个垂直于xoy平面的z方向的运动,就可以实现空间曲面的加工与操作。
本文仅讨论工业上最常用的各类直线轨迹、圆轨迹的位移形状特性和动态特性对二滑块驱动的要求,其他任意的一般平面曲线均可看作是直线轨迹与圆轨迹的组合。
1 机构创新及大范围作业的工作原理
如图1所示,二滑块位于相距h的二平行固定导轨上,二连杆为可调长结构,其长度之差为h,连杆AB长为L1,连杆BC长为b,且满足b=L1+h,其中,A、B、C分别表示机构中的三个铰链;SA、SC分别表示二滑块A、C在导轨上的x位移;P(xP,yP)表示末端执行器的位置;设θi(i=1,2)分别表示连杆AB、BC与x轴正向的夹角。
当二滑块沿导轨做往复直线移动时,可使末端执行器操作点P在xoy平面内做任意平面曲线运动。
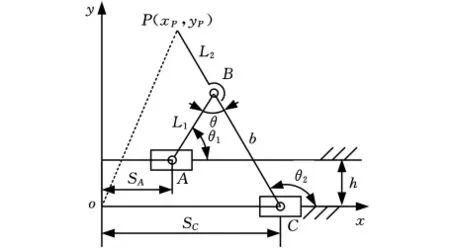
图1 二自由度平行导轨并联操作手简图
本机构有两个创新之处:一是结构创新,二导轨布置于相互平行的二个导轨上,而不在同一条直线上;二是功能创新,应用冗余控制或惯性的方法通过二连杆重叠和拉直共线形成的两个奇异位置,可实现大范围工作空间内任意形状平面曲线型操作[7-8]。这里,结构创新是功能创新得以实现的前提,功能创新是这种机构结构创新的体现。
功能创新是通过利用运动奇异位置来实现的。运动位置奇异性是机构的固有特性,处于奇异位置时,机构的运动具有不确定性,因而通常是要避免的,许多学者对如何避免运动奇异位置进行了研究。而本文为扩大机构的工作空间,却需要利用越过奇异位置,使机构在不同的构型中运动,得到更大的工作空间,以实现各种轨迹的需要,其工作原理如图2所示。
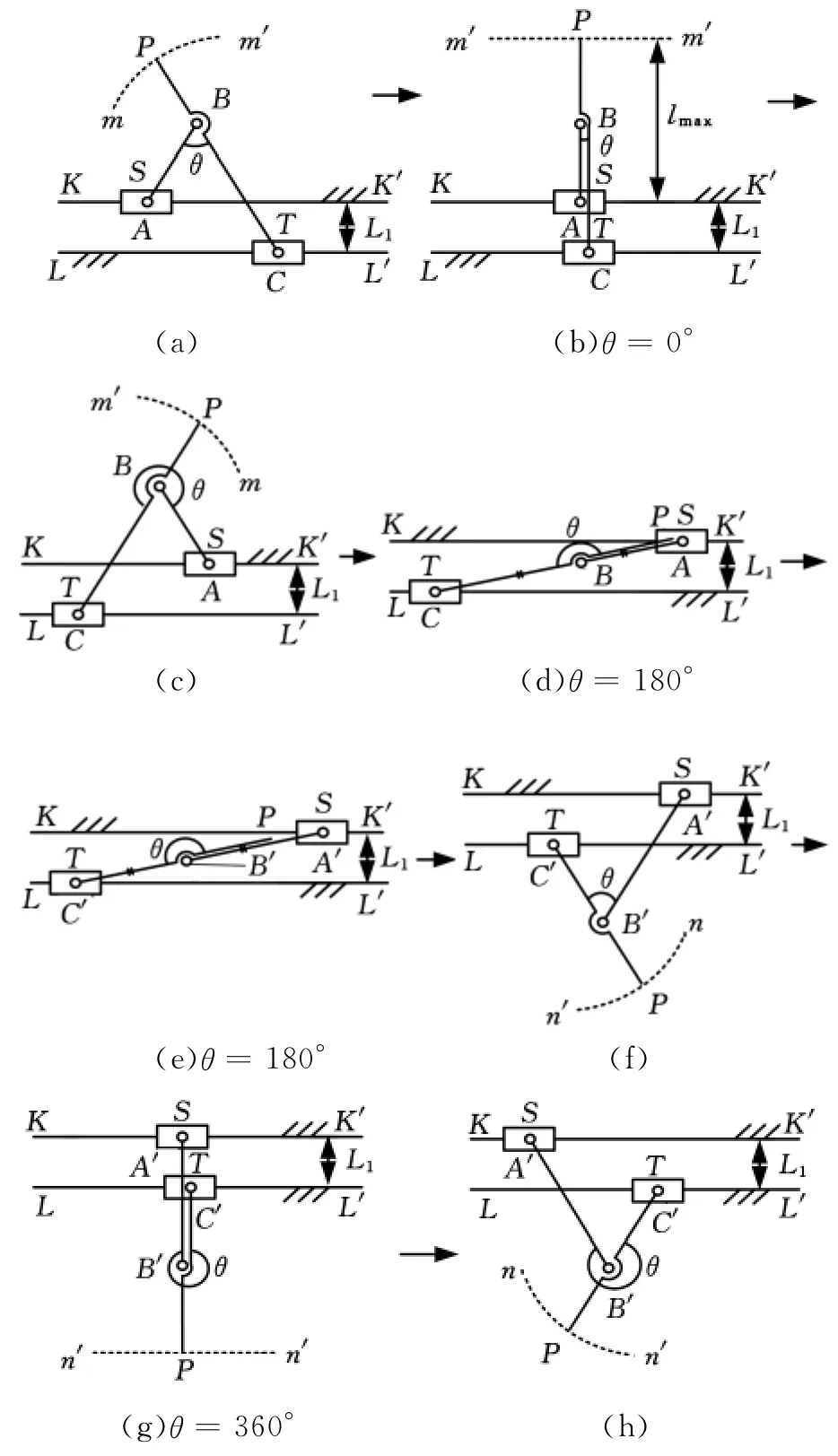
图2 利用奇异性实现大范围作业流程图
如图2b所示,当θ=0°时,即连杆AB与BC重叠共线时,通过控制二滑块S、T左右交错位置,可使机构从构型A-B-C顺时针布置(图2a)转换为构型A-B-C逆时针布置,如图2c所示,这样该装置能在平行导轨的整个上半部作业区域内完全工作,两个构型的工作空间比一个构型的工作空间扩大了两倍。
如图2d所示,当θ=180°时,即连杆AB与BC拉直共线时,在此位置上(通过丝杠结构的螺旋副)调节二连杆AB、BC的杆长,并使AB杆长增长至A′B′,BC杆长缩短至B′C′,且使A′B′-B′C′=L1,此过程二滑块S、T的位置有所移动,如图2e所示;进一步,在此位置上通过控制设置在关节B′处的冗余电机,使连杆A′B′、B′C′越过其重叠线A′-B′-C′到达下半部,以使该装置能在二平行导轨的下半部作业区域内开始工作,如图2f。
如图2g所示,当θ=360°时,即连杆A′B′与B′C′重叠共线时,通过控制二滑块S、T左右交错位置,可实现从构型A′-B′-C′顺时针布置(图2f)转换为构型A′-B′-C′逆时针布置,如图2h所示,这样该装置能在平行导轨的整个下半部作业区域的另两个构型工作空间中继续工作。
上述过程实现的前提是必须满足尺寸关系:b=L1±h,一旦样机做好,两平行导轨的距离h就确定了,调节杆长L1和b时,在y轴正半平面内须保证b>L1,且b=L1+h;而在y轴负半平面内须保证L1>b,且b=L1-h,这样才能使机构通过3个奇异位置(θ=0°,θ=180°,θ=360°)时,从一种构型变换到另一种构型,依次地在4个不同的构型(图2a、图2c、图2f、图2h)中工作,这样,该装置的工作空间比传统的单一导轨二滑块驱动并联机构(为单个构型)的工作空间扩大了4倍。
2 运动学模型
选取图2a所示构型,并建立直角坐标系xoy,如图1所示。
2.1 运动学正解
已知SA、SC,求P点位置。由矢量法,易有机构运动学矢量方程:

即

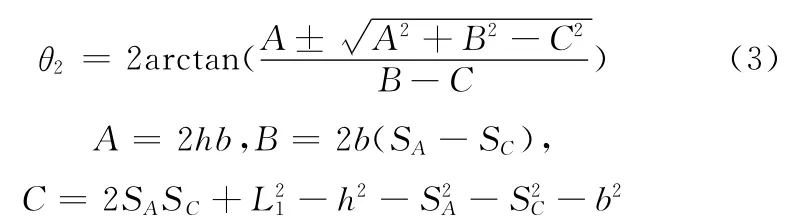
消去式(2)中θ1,并化简得

则
同样,由式(2)有

进一步有

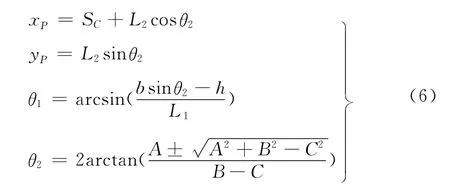
于是末端执行器P的位置正解方程为
2.2 运动学反解
已知P 点位置(xP,yP),求SA、SC。由式(6)和式(2)可得末端执行器P的位置反解方程:
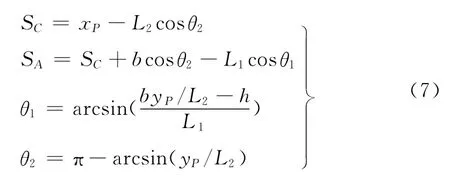
由位置反解方程对时间求导,即可得到速度反解方程:

再由速度反解方程对时间求导,即可得到加速度反解方程:
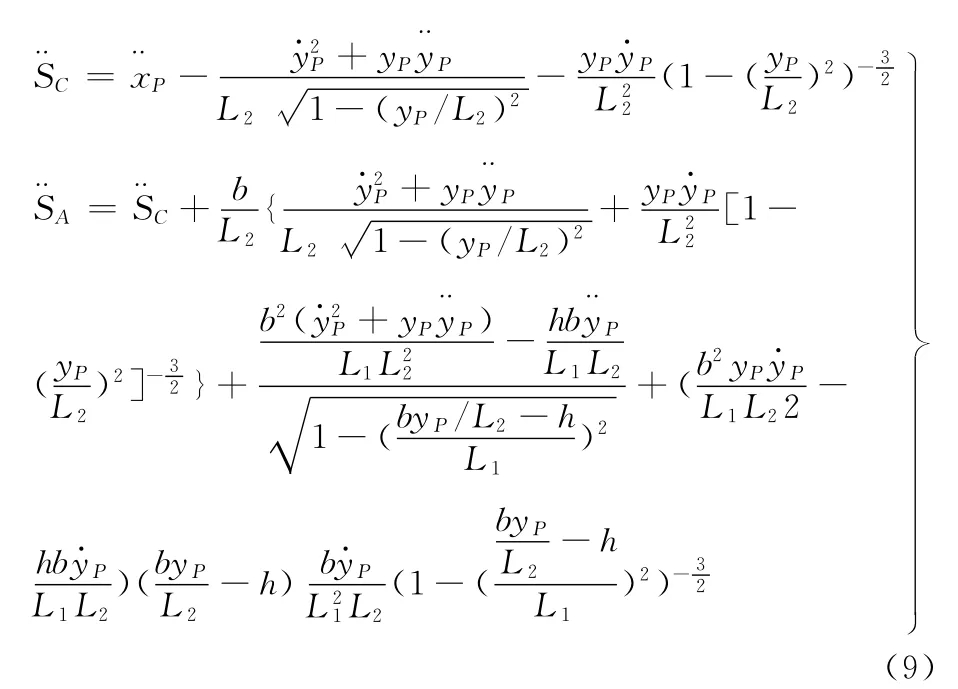
下面运用式(7)~ 式(9),采用 MATLAB仿真技术,即可研究操作曲线的运动特性。
3 实现操作点的运动特性
3.1 实现操作点运动的位移特性
下面研究工业操作点P的运动位移特性,即研究当操作点P实现特定运动轨迹时,二滑块位移SA、SC的变化规律。
本文实验装置取AB 杆长80mm,PC杆长150mm,BC杆长120mm,二平行导轨之间的距离h=40mm。
分析工业上各种平面操作特点,其最常用的操作曲线一般为图3所示的各类直线轨迹及圆轨迹,其他的一般平面曲线几乎都可以由这些基本曲线组合而成,例如,选择适当的起始、终止点,采用图2a所示的装配构型,就可实现如图4所示的工艺操作曲线。
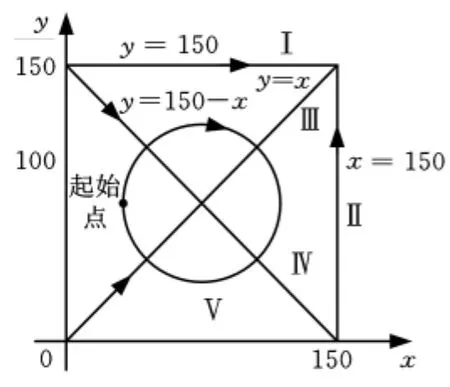
图3 5种常用的运动曲线形状
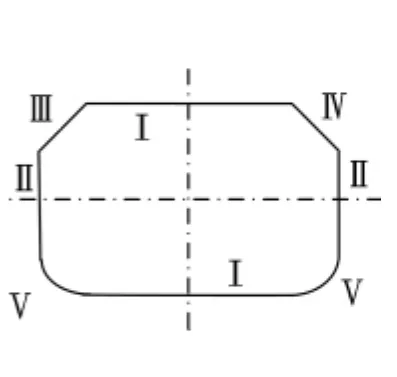
图4 工业操作曲线样例
3.1.1 P点做平行x轴方向运动的轨迹Ⅰ
显然,当二滑块取大小与方向相同的速度,即vA=vC时,P点即沿平行于x轴方向做直线运动,轨迹离开x轴的垂直距离取决于夹角θ(0°≤θ≤180°)的大小,当θ=0°、θ=180°时,对应轨迹所围的面积是其工作空间的宽度,而工作空间的长度取决于二平行导轨的长度,因此,这种情形可实现长距离的狭长矩形工作空间。
3.1.2 P点做平行于y轴方向运动的轨迹Ⅱ
图5所示曲线分别表示要实现P点的运动轨迹 Ⅱ(平行y 轴,起点为 (150mm,0),终点为(150mm,50mm))时,滑块A、C沿x 轴的位移变化规律,仿真表明,当曲线Ⅱ的x坐标值不同时,图5中SA、SC位移曲线的位置会上下平移,但形状基本不会改变。
3.1.3 P点做斜率为1的直线运动时的轨迹Ⅲ
图6所示两曲线分别表示实现P点的运动轨迹 Ⅲ(斜率为1,起始点为(0,0),终止点为(150mm,150mm))时,二滑块A、C的位移变化规律。当P的运动轨迹Ⅲ向右平移时,图6所示两曲线均会向上平移,但曲线的形状基本不会改变。
3.1.4 P点做斜率为-1的直线运动时的轨迹Ⅳ
图7所示曲线分别表示实现P点的运动轨迹Ⅳ(斜率为-1,起始点为(0,150mm),终止点为(150mm,0))时,二滑块A、C的位移变化规律。当P的运动轨迹Ⅳ向右平移时,图7所示的曲线均会向上平移,但曲线的形状基本不会改变。
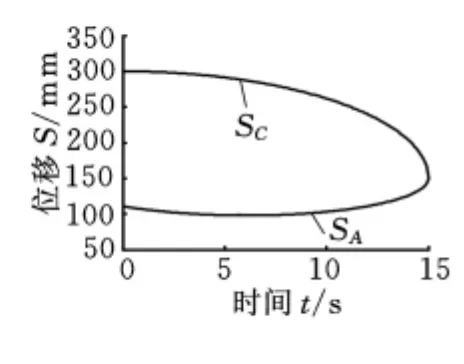
图5 实现轨迹Ⅱ的二滑块A、C的位移变化规律
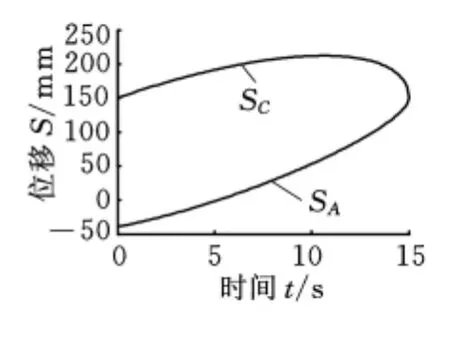
图6 实现轨迹Ⅲ的二滑块A、C的位移变化规律
3.1.5 P点做圆周运动时的轨迹 Ⅴ
图8所示曲线分别表示实现P点的运动轨迹Ⅴ(圆方程为(x-80)2+(y-80)2=900)时,二滑块A、C的位移变化规律。P点运动轨迹的起点为(50mm,80mm),沿顺时针方向运动回到起点(图3)。
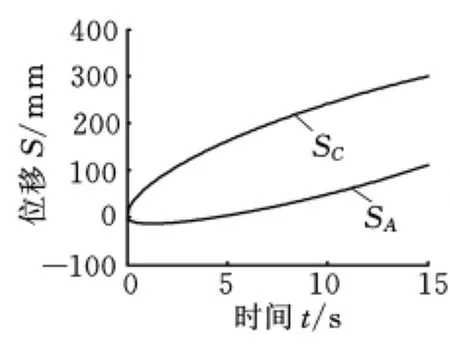
图7 实现轨迹Ⅳ的二滑块A、C的位移变化规律
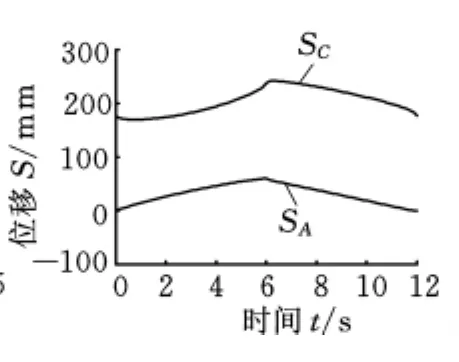
图8 实现轨迹Ⅴ的二滑块A、C的位移变化规律
3.2 实现操作点运动的速度特性
除了实现操作点P不同形状的轨迹外,还需要研究其动态特性,如高速喷涂工艺需要做匀速运动。下面仅讨论研究操作P点做匀速直线运动时的速度特性,即二滑块速度vA、vC的变化规律。
3.2.1 P点做平行于x轴方向的匀速运动
显而易见,当二滑块A、C取大小与方向相同的速度时,P点速度的大小与方向即为二滑块A、C的速度的大小与方向。
3.2.2 P点做平行于y轴方向的匀速运动
图9所示曲线表示P点沿平行于y轴方向的轨迹Ⅱ做10mm/s匀速运动时,二滑块A、C的速度变化规律。图9中负值表示滑块沿x轴负方向运动。若P点的运动速度改变,曲线的形状不会发生很大变化。
3.2.3 P点做斜率为1的匀速直线运动
图10所示曲线表示P点沿斜率为1的直线轨迹Ⅲ并以速度10mm/s做匀速运动时,二滑块A、C的速度变化规律。
3.2.4 P点做斜率为-1的匀速直线运动
图11所示曲线表示P点沿斜率为-1的直线Ⅳ并以速度10mm/s做匀速运动时,二滑块A、C的速度变化规律。
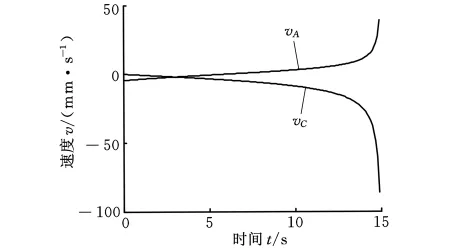
图9 实现P点沿轨迹Ⅱ匀速运动的vA、vC变化规律
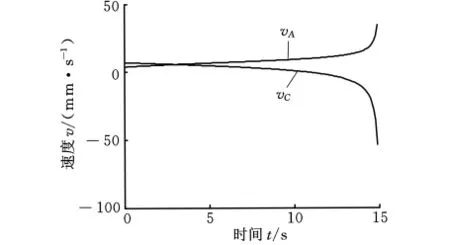
图10 实现P点沿轨迹Ⅲ匀速运动的vA、vC变化规律
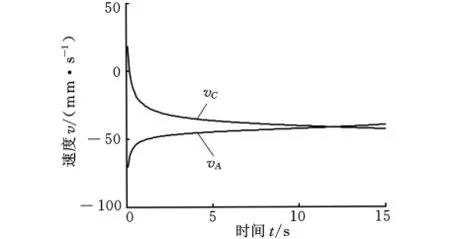
图11 实现P点沿轨迹Ⅳ匀速运动的vA、vC变化规律
3.2.5 P点做匀速圆周运动
图12所示曲线表示P点沿(x-80)2+(y-80)2=900的圆周、并以速度为10mm/s做匀速圆周运动时,所需二滑块A、C的速度变化规律。
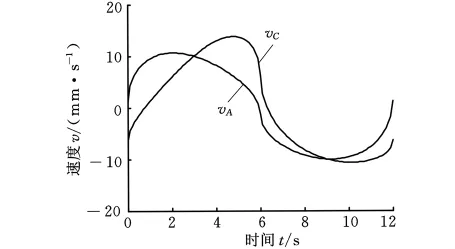
图12 实现P点沿轨迹Ⅴ匀速运动的vA、vC变化规律
3.3 实现操作点运动的加速度特性
下面研究操作P点运动时的加速度特性,即二滑块的加速度aA、aC的变化规律。
操作点在启动和换向时存在加速和减速过程,研究二滑块加速度aA、aC的变化规律对实现操作点P的加速度平稳启动和换向有着重要的意义。为节约篇幅,这里仅研究P点以匀加速和匀减速做斜率为k的直线运动时,二滑块加速度aA、aC的变化规律。
图13和图14所示曲线分别表示操作点P沿轨迹Ⅲ且以2mm/s2加速度做匀加速、匀减速运动时,二滑块所需的加速度aA、aC变化规律。
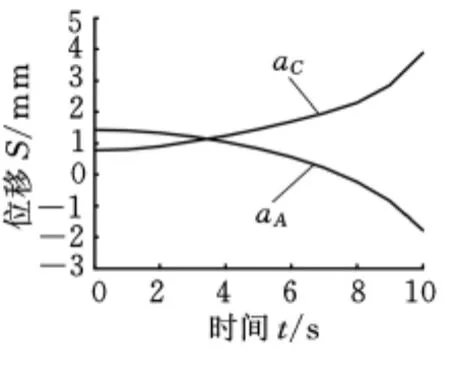
图13 实现P点沿轨迹Ⅲ做匀加速运动的aA、aC 变化规律
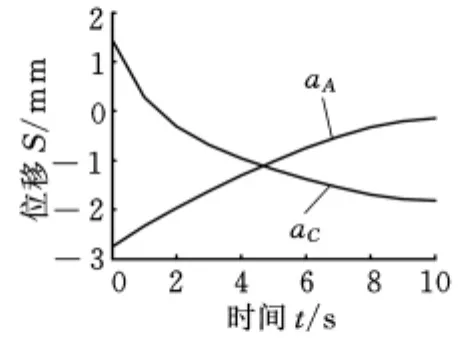
图14 实现P点沿轨迹Ⅲ做匀减速运动的aA、aC 变化规律
4 工作空间分析
机构工作空间定义为末端执行器上点P在操作平面内所能到达位置的集合,它是衡量并联机构性能的重要指标之一[9-10]。由式(6)可知,点P的轨迹是以(SC,0)为圆心、以L2为半径的圆,由于SC是变化的,故其工作空间是变化圆心的一系列圆的集合,图15描述了该机构的工作空间。

图15 并联机构的工作空间
影响工作空间大小和形状的因素主要是杆长,从图16和图17中可以看出:杆长L1变化对工作空间的形状影响比较大,杆长L2的变化对工作空间的大小影响比较大。为分析方便,仅改变L1,讨论以下3种情况,如图18所示。
(1)当b=L1+h时,工作空间的面积S为
(2)当b>L1+h时,工作空间的面积S为

(3)当b<L1+h时,工作空间的面积S为

图16 杆长L1变化对工作空间形状的影响(L2 =150mm,h=40mm,b=L1+h)
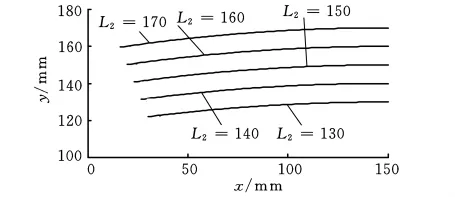
图17 杆长L2变化对工作空间大小的影响(L1 =80mm,h=40mm,b=120mm)
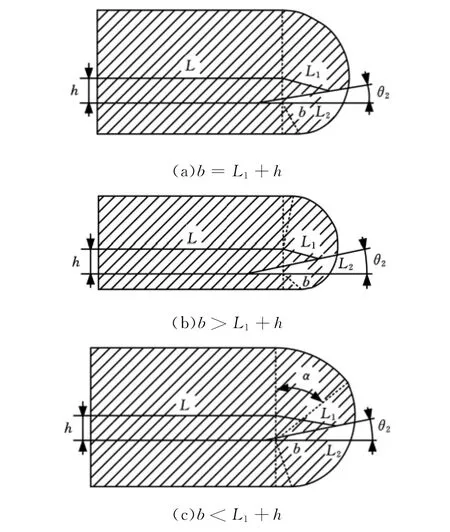
图18 工作空间分析
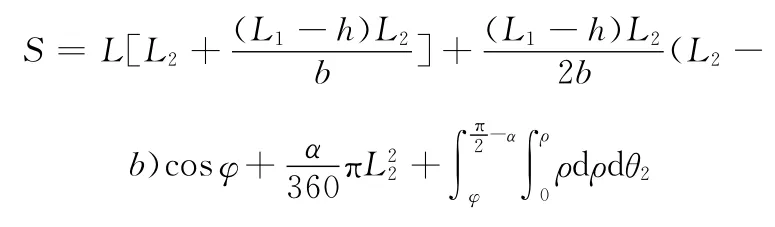
其中:


5 实验样机研制
实验样机如图19所示,其中,二滑块与导轨采用高精度线性滑轨系统,并由同步带驱动,所有铰链转动副采用进口滚珠轴承,以提高装置的制造精度;连杆杆长的调节是通过丝杠结构的螺旋副来实现的。本文仅讨论图2a所示构型的并联操作手的运动特性,同时用手动的方法验证了利用奇异位置扩大工作空间的可行性,但尚未研究如何用冗余电机实现通过二连杆共线位置达到不同构型区域工作的具体结构及其控制方法,有待另文研究讨论。显然,冗余电机仅在二连杆重叠或拉直共线位置时才参与驱动,此时,二滑块是锁定不运动的,因此,原机构还是二自由度机构。
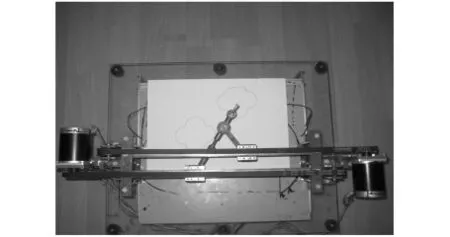
图19 大范围作业二自由度并联操作手实验样机
控制系统采用基于ARM微控制器的步进电机控制,即整个系统的运动轨迹规划、传感器信息的处理和步进电动机的控制,均由ARM微控制器来实现,这种控制方式充分利用了ARM微处理器较大的存储容量和强大的运算能力特性,系统结构紧凑、实用,制造和使用成本低,开发简易;同时步进电机传动的开环控制系统结构简单、使用维护方便、可靠性高。
限于篇幅,有关该并联操作手力分析的研究待另文讨论。
6 结论
(1)提出了一种二平行导轨二滑块驱动在一侧的、用丝杠结构的螺旋副来实现可调杆长的并联机构,该机构结构简单、定位精度高、动态响应性能好、制造成本低、操作方便,具有运动学正反解析解,且推导简单、计算容易、易于实现实时控制等。
(2)理论上通过滑块本身的控制或增加一个冗余电机方法,利用3个奇异位置,可实现4个构型分别工作,4倍地增大了操作工作空间;在实验样机上用手动的方法已验证了这种利用奇异位置扩大工作空间的可行性及工作原理。
(3)给出了该机构一个构型的运动学位置正反解,基于运动学反解模型,用MATLAB仿真技术,给出了机构操作点分别沿平行于导轨直线、垂直于导轨直线、斜直线、圆轨迹运动时,二滑块所应具有的位置、速度、加速度随时间的变化规律,并在实验样机上得到上述各种运动特性的验证,为该并联操作手的精确控制及其工业应用奠定了基础。
(4)若在末端执行器加上z方向的直线移动或A、B轴转动,即可构成三轴、四轴、五轴操作手,可实现大范围任意空间加工或操作。因此,本装置可应用于平面或空间大范围金属切削加工、焊接、切割、测量、喷涂、雕刻等工业操作。
[1] Gao Feng.New Kinematic Structures for 2-,3-,4-,and 5-DOF Parallel Manipulator Designs[J].Mechanism and Machine Theory,2002,37:1395-1411.
[2] 王海东.并联机器人机构构型与性能分析[D].秦皇岛:燕山大学,2001.
[3] Liu Xinjun,Jeong J I.A New Planar-Two-Degree of Freedom Parallel Mechanism[C]//Proceeding of the 11th Word Congress in Mechanism and Machine Science.TianJing:2004,1214-1218.
[4] 张顺心,范顺成,肖汾阳,等.并联机床主运动机构工作空间分析[J].机械设计,2003,20(3):39-41.
[5] 王冰,高峰,彭斌彬,等.一种二自由度并联平面机构的尺度综合[J].机械设计与研究,2005,21(2):21-23.
[6] 高铁红,陶媚,孙立新,等.一种两自由度并联机床平台机构及其运动学分析[J].机械科学与技术,2003,22(1):92-93.
[7] 沈惠平,丁磊,邓嘉鸣,等.一种平面型数控加工操作装备:中国,200910181312.6[P].2009-07.
[8] 沈惠平,刘善淑,邓嘉鸣,等.一种平面型数控并联运动操作装备:中国,200910181313.0[P].2009-07.
[9] 何卫锋,刘吉安,阳曼,等.两轴驱动并联机构的运动分析[J].包装工程,2006,27(5):139-141.
[10] Hesselbach J,Helm M B,Soetebier S.Workspaceoptimized Parallel Robot for Placing Tasks[C]//Proceedings of 2002Parallel Kinematic Machines International Conference.Chemnitz,2002,16:697-713.
猜你喜欢
现代机械(2023年5期)2023-11-15 12:30:54
中学生数理化(高中版.高考理化)(2022年3期)2022-04-26 13:41:28
微型电脑应用(2021年2期)2021-03-17 07:32:50
中学生数理化(高中版.高考理化)(2021年12期)2021-03-08 00:48:08
中国特种设备安全(2019年7期)2019-09-10 07:30:42
新能源科技(2018年10期)2018-02-15 20:23:20
北京航空航天大学学报(2017年10期)2017-04-20 08:51:23
消费电子(2016年10期)2016-11-10 16:11:55
制造技术与机床(2015年10期)2015-04-09 07:05:58
航天返回与遥感(2014年4期)2014-07-31 17:47:47
