
无人机载LoRa空地感知定位应急搜救系统设计与应用
2025-01-31 00:00:00邱永昊杨文靖尚康周江湃
技术与创新管理 2025年1期
关键词:无人机


摘 要:为降低复杂环境下应急搜救作业人员的伤亡风险并提升救援效率,利用空中唤醒、LoRa感知定位等技术以及空地感知融合定位算法,开展无人机对地扫描飞行姿态角对LoRa传输角度影响的探究工作,对比分析传统卫星定位设备与LoRa物联网模组的性能差异,进行无人机载LoRa空地协同定位策略研究及应急搜救系统设计与实现工作。研究表明:在户外山谷环境中无人机载LoRa基站对地信号接收方位角不受环境限制,而且无人机载LoRa空中唤醒模组的功耗远低于卫星定位设备。经实地验证,研究设计的无人机载LoRa空地感知定位应急搜救系统在户外复杂环境下开展紧急搜救,能够有效实现长续航、快响应、定位准等效果,是一种便携的空地感知融合定位搜救方式,对降低人员伤亡风险、提高救援效率有显著作用。
关键词:应急搜救;LoRa;无人机;空地感知;三维空间定位
中图分类号:X 924.4;P 228.4
文献标识码:A" 文章编号:1672-7312(2025)01-0081-08
Design and Application of Unmanned Aerial Vehicle LoRa
Air-ground Sensing and Positioning Emergency
Search and Rescue System
QIU Yonghao1,2,3,YANG Wenjing1,3,SHANG Kang1,3,ZHOU Jiangpai2
(1.CEC Spark Platform Technology Co.,Ltd.,Xi’an 710054,China;
2.Xihang Tiandchen Joint Laboratory for Flight Control Simulation,Xi’an 710054,China;
3.Uav Flight Control Technology and Safe and Trusted Applications Laboratory,Yan’an 716000,China)
Abstract:In order to reduce the casualty risk of emergency search and rescue workers in complex environment and improve the rescue efficiency,the influence of UAV’s ground scanning flight attitude angle on the transmission angle of LoRa is explored by using technologies such as airborne wake-up,LoRa sensing positioning and air-ground sensing fusion positioning algorithm,and the performance difference between traditional satellite positioning equipment and LoRa IOT module is compared and analyzed,and the air-ground collaborative positioning strategy based on unmanned aerial vehicle LoRa and the design and implementation of emergency search and rescue system are carried out.The research shows that the azimuth angle of the ground signal received by the unmanned airborne LoRa base station is not limited by the environment in the outdoor valley environment,and the power consumption of the unmanned airborne LoRa airborne wake-up module is significantly lower than that of the satellite positioning equipment.After field verification,the unmanned airborne LoRa air-ground sensing and positioning emergency search and rescue system designed in this study can effectively achieve the effects of long battery life,quick response and accurate positioning in outdoor complex environment.It is a portable air-ground sensing and positioning search and rescue method,which has a significant effect on reducing the risk of casualties and improving rescue efficiency.
Key words:emergency search and rescue;Long Range Radio(LoRa);UVA;air-ground sensing;three-dimensional space positioning
0 引言
近年来,河南郑州“7·20”特大暴雨灾害、甘肃积石山6.2级地震以及京津冀严重暴雨洪涝灾害等突发事件造成了严重的人员伤亡及社会经济损失[1-3]。在突发灾害事件发生的过程中,致灾因子、孕灾环境、承灾体3种因子在时间和空间维度的交织变化,对突发安全事件的影响也会发生变化,继而会引发一系列灾难性的人员伤亡及财产损失事故[4]。突发事件发生后,受灾区域时常出现通信中断、山区无线节点组网困难、灾区人员位置不明、灾害现场环境状态感知滞后的问题,这给应急救援带来了极大挑战。快速获取被困人员位置,实时感知灾区现场状况,建立受困人员、救援人员和指挥中心间实时双向的通信联络,将有助于研判救援行动的安全性,提升应急搜救的及时高效性[5-6]。
尽管目前我国在突发自然灾害紧急搜救技术方面取得了一系列成果,但在山区突发灾害的复杂环境下通信网络快速重构、人员位置信息感知等关键技术和自主化装备方面研发力量尚为薄弱,在户外复杂环境中开展失联人员的紧急搜救成本高且难度大,这些成为亟需解决的现实问题。定位技术是物联网多数应用场景的基础,尽管全球定位系统(GPS)、北斗定位系统是解决多数定位问题的常用策略[7-8],但在山高林密的复杂户外环境开展人员搜救时,卫星定位设备受地形的限制不便于携带,经常出现通信中断等问题。加之卫星定位设备自身存在的功耗大、待机时间短等诸多弊端,不仅制约着卫星定位的实际应用,还严重影响到应急搜救工作的开展。面对这些客观因素,政府机构及社会救援力量也急需一种不依赖卫星,自成体系的定位系统。
LoRa(Long Range,低功耗远程无线信号)是低功耗远程无线通信技术,实现了长距离、低功耗通信[9]。此外,基于LoRa的通信技术既可以进行数据传输,也可以在无需增加额外设备的环境中计算节点位置,目前的一些研究成果已证实,LoRa技术能够应用于定位系统[10-11]。随着我国无人机技术的快速发展,低空遥感成为卫星遥感定位的主要补充,无人机常常被利用在快速紧急搜寻的事故现场,通过在目标区域以低飞巡查的方式进行救援活动[12],但由于无法得到失联者的精准位置,往往会耽误搜救的黄金时间,进而造成遇险人员身体受损甚至失去生命[13]。为此,针对户外复杂环境中紧急搜救作业,提出基于LoRa空地感知定位应急搜救的技术及解决方法,构建空地一体化应急搜救体系。通过研究,以期弥补在复杂环境中进行紧急救援时卫星定位设备出现的诸多短板,同时为巡检、消防、勘测等应急安全领域提供技术借鉴和实践经验。
1 空地感知定位应急搜救系统分析
1.1 系统可行性分析
1.1.1 无人机研发技术相对成熟
近年来,作为低空经济核心板块的无人机产业成为新质生产力的代表,当前中国的无人机产业在全球已处于领先地位,并且未来几年仍将保持快速增长的态势[14]。在无人机可靠性与安全性方面,国内已积累了颇为丰富的技术成果和研发经验。其中,作为无人机飞行控制核心的飞行控制系统(简称飞控系统)已然较为成熟,能够确保无人机精确、安全地执行各种任务,这为无人机应急救援的技术研发提供了有力支撑[15-16]。
多旋翼、复合翼以及固定翼是常见的无人机类型,各具特点和优势,能够依据不同的应用场景,与LoRa技术的唤醒、感知及定位需求进行适配。多旋翼无人机因其自身特性,适合低空飞行以及悬停搜索,能够在特定区域进行细致的搜索作业;复合翼无人机则适合低空盘旋搜索,可在低空实现较为灵活的盘旋探测;固定翼无人机因其速度优势,适合大面积的快速搜索,能够在短时间内覆盖较大范围。上述类型无人机在低空领域都有着出色的表现,能满足应急救援场景的应用需求。
1.1.2 LoRa技术和卫星定位技术协同
在现代科技的不断发展中,LoRa技术展现出了独特的优势[17-18]。LoRa技术能够以相对较低的发射功率实现更为广泛的传输范围,这种显著特性使得它在户外定位紧急搜救领域具有极高的适用性。
LoRa技术作为一种低功耗广域技术,在复杂的户外空间中,尤其在信号覆盖困难的区域不仅能够稳定地进行数据传输,而且确保了信息传递的有效性。将LoRa技术与无人机飞控系统的卫星定位技术相结合,通过无人机的灵活飞行和LoRa技术的稳定传输,能够快速、准确地获取目标位置信息,为救援行动争取宝贵的时间。在复杂多变的户外环境中,无论是地形的阻碍、信号的衰减还是其他干扰因素,都能够在一定程度上被有效应对。LoRa技术与无人机飞控系统的卫星定位技术将在定位搜救领域协同发展,应用效果还将不断提升。从实际应用考虑,该技术路径是一种更为高效、精准的户外定位搜救手段。
1.1.3 LoRa高精度定位技术适用于户外复杂环境
在众多突发性灾害中,大多数灾害往往发生于野外复杂环境之下[19]。在此情境中,人员失联或落水失踪等情况常常发生,当人员在较小区域内失联,一般通过地面搜救方式能够较为容易地找到目标。然而,面对大面积区域进行紧急搜救任务,情况往往会变得异常复杂。在大面积区域中开展紧急搜救工作,按以往经验若能将失联人员的位置精准锁定在半径100 m的可视范围,再配以地面搜救行动,便能够快速有效地展开救援工作。由此可见,精准定位在户外紧急搜救中至关重要。
LoRa定位技术所表现出的高精度定位性能,已经具备在复杂野外环境中实现相对准确定位的能力,能够在较大范围的区域内有效确定目标位置,为搜救行动提供关键指引。具体来说,LoRa定位技术的优势在于能够适应野外复杂多变的环境条件,如地形起伏、信号干扰等。此外,在各种恶劣自然条件和复杂电磁环境中,LoRa定位技术依然能够保持相对稳定的工作状态,持续为紧急搜救行动提供准确位置信息。因此,LoRa高精度定位技术完全满足户外复杂环境下搜救工作的开展需求。
1.2 系统功能需求分析
经过以上技术调研及研究,在现有无人机飞控系统、LoRa定位技术及卫星定位技术的基础上,可以确定空地感知定位应急搜救系统的设计。
1.2.1 人员定位功能
在户外复杂环境中,人员佩戴的LoRa信标在常态下能够保持休眠状态,以节省能耗并延长使用寿命,满足户外长续航、保障系统正常运行的状态需求。当接收到唤醒指令时,LoRa信标能够迅速做出响应并实时反馈信号,准确定位人员位置。
1.2.2 低空搜救功能
无人机搭载LoRa基站,以低空飞行或盘旋飞行的方式对地面区域进行覆盖式扫描飞行。同步向地面发送唤醒指令,在接收到地面LoRa信标的反馈数据后,结合无人机飞控系统和定位算法,精确锁定LoRa信标的坐标位置,并将坐标数据发送到地面控制系统,为救援人员提供决策依据,赢得宝贵救援时间,提高救援效率。
1.3 系统性能需求分析
在系统性能需求分析阶段,充分考虑了国家及行业相关标准要求,以切实保障应急搜救系统在突发灾害的复杂救援环境中运行的安全性、稳定性与可靠性。研究依据并参考了GB/T 41205.3—2021《应急物资编码与属性描述 第3部分:搜救设备》、YJ/T 1.3—2022《社会应急力量建设基础规范 第3部分:山地搜救》、YJ/T 1.4—2022《社会应急力量建设基础规范 第4部分:水上搜救》等标准中关于搜救系统设备建设和搜救工作开展的规范要求。
1.3.1 系统处理的准确性和及时性
应急搜救系统的准确性和及时性对于救援工作至关重要。在系统设计开发阶段,需要充分考虑其所面对的复杂环境,以及应急搜救工作中对定位精度和时效性的要求。系统的定位精度和部署便捷性必须满足应急搜救的需求,以确保救援工作的准确性、高效性。因此,在设计和开发应急搜救系统时,须注重提高系统在户外复杂环境中的定位精度,以满足实际应急搜救任务的需求。通过确保关键性能,可最大限度减少应急救援中的误差和延误,提高响应效果和救援成功率。
1.3.2 系统的开放性和系统的可扩展性
在应急搜救系统的开发过程中,应充分考虑未来的可扩展性,例如搜救对象可能由人员扩展到动物等。为实现此功能,系统的设计应为开放式,即只要符合系统的逻辑规则,就可以简单地对系统进行模块的添加或删除,对系统硬件进行重
新配置,通过对软件升级替换,就可实现系统应用。
1.3.3 系统的易用性和易维护性
应急搜救系统的使用人员不一定对无人机系统有很深的了解,因此需要提供易于使用的人机交互界面。因此,系统应该尽量使用用户熟悉的术语和中文界面,便于用户的理解和操作。同时,针对用户可能遇到的问题,系统应该提供足够的在线帮助,例如操作指南、常见问题解答等,以缩短用户熟悉系统的过程。
1.3.4 系统的标准性
系统在设计开发使用过程中涉及的计算机硬件、软件等都要符合主流国际、国家和行业标准,这些标准包括但不限于数据传输标准、通信协议、操作系统、数据库、网络协议等。遵循这些标准可以确保系统在不同平台和环境中正常运行,提高系统的兼容性和可靠性。同时,遵循国家和行业的安全标准也可以保证系统的安全性和稳定性。
1.3.5 系统的部署响应速度
由于应急搜救系统使用场景的特殊性,使其对时间的要求极为苛刻,时间关乎失联人员的生命安全,因此系统的部署时间越短越好,系统启动响应的速度要按照秒的级别考虑,保障操作人员不会因为系统部署速度问题而影响紧急救援的效率。
2 空地感知定位应急搜救系统设计
2.1 系统总体构成
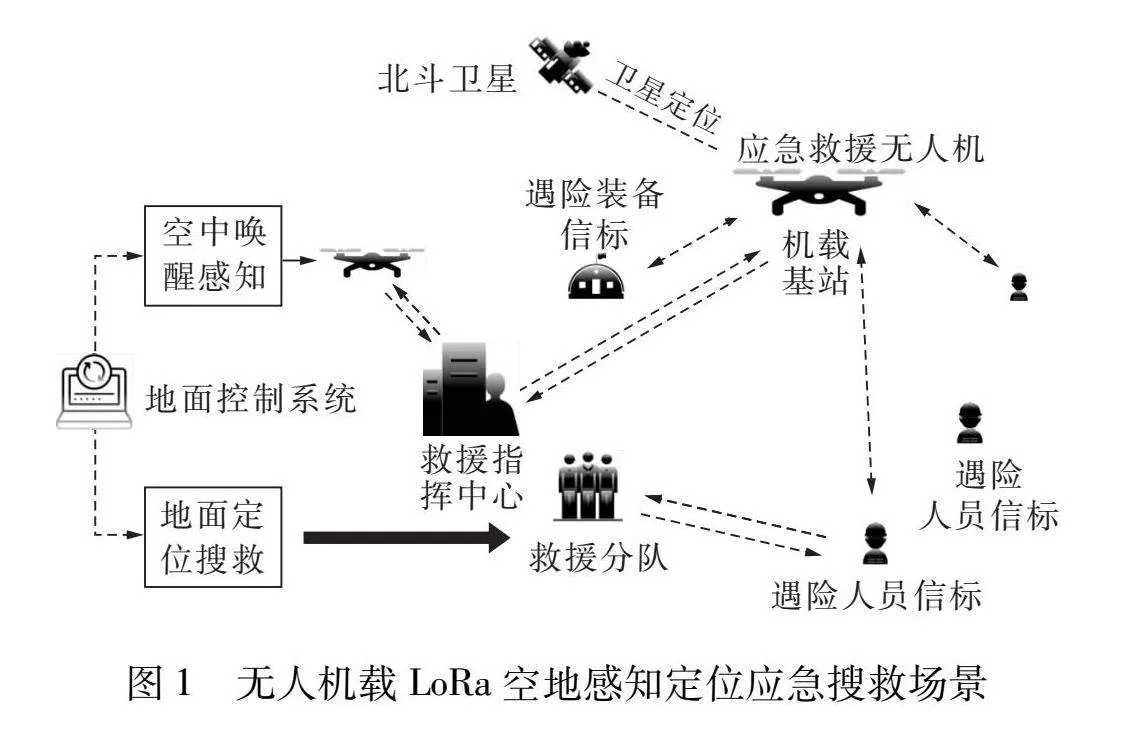
空地感知定位应急搜救系统从主体结构上分为天空端、地面端。天空端以应急搜救无人机和机载LoRa基站为主,主要在于唤醒指令的发布以及地毯式对地扫描飞行,实现快速高效的大面积空中搜索。地面端以LoRa信标(接收机)和地面搜救平台为主,LoRa信标可佩戴附属于人体、物体表面,功耗低至22 dB,续航长达6~12个月甚至更长时间。地面搜救平台主要是基于无人机地面控制系统进行功能设计,接收机载LoRa基站发送的数据,结合感知定位融合算法进行处理并实时呈现出信标、无人机及地面控制系统所在坐标位置,同步向救援指挥中心发送坐标数据,便于搜救决策。无人机载LoRa空地感知定位应急搜救场景示意如图1所示。
2.2 功能模块设计
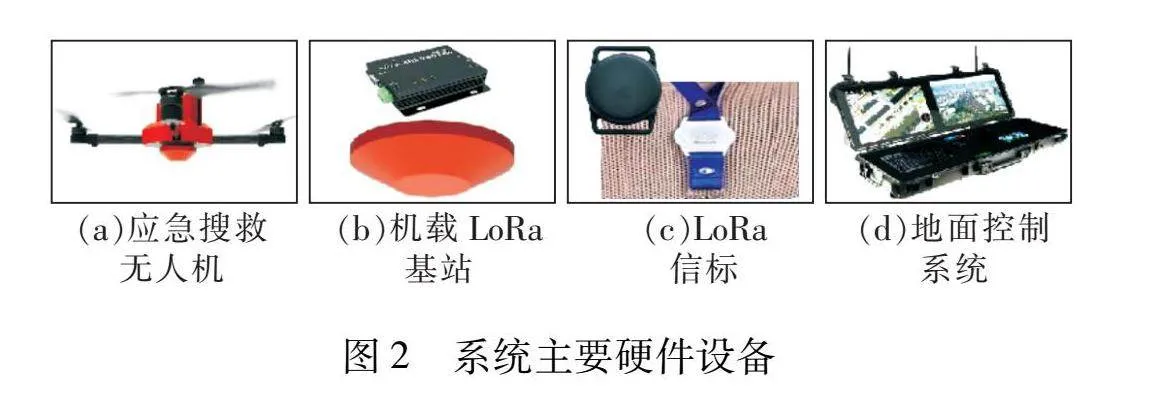
系统主要硬件分为4个部分,应急搜救无人机、机载LoRa基站、LoRa信标、地面控制系统,如图2所示。
应急搜救无人机具备自动飞行、航线规划、定高飞行、定点飞行、自动返航、自动避障、自动识别、跟踪飞行等功能,续航≥120 min,飞行半径15~30 km。
机载LoRa基站和地面LoRa信标属于一组物联网模块。在执行任务时,无人机飞控系统协同机载LoRa基站按照信号强度、反馈时间,并结合实际感知数据计算出LoRa信标的基本位置。同时,依据无人机坐标向地面控制系统或应急救援平台发送失联目标的精确位置,从而为应急搜救工作提供依据。为了加大地面LoRa信标的接收角度,减少遮挡因素,机载LoRa基站挂载于无人机腹部,随着无人机的飞行搜索,可大角度发送唤醒指令,同时锥形结构可降低风阻。其次,壳体材质选用透波材料进行加工,减少信号衰减。机载LoRa基站上部预留有通道方便LoRa模组与飞控系统进行数据交互,同时无人机锂电动力系统也为LoRa基站提供稳定电源,如图3所示。
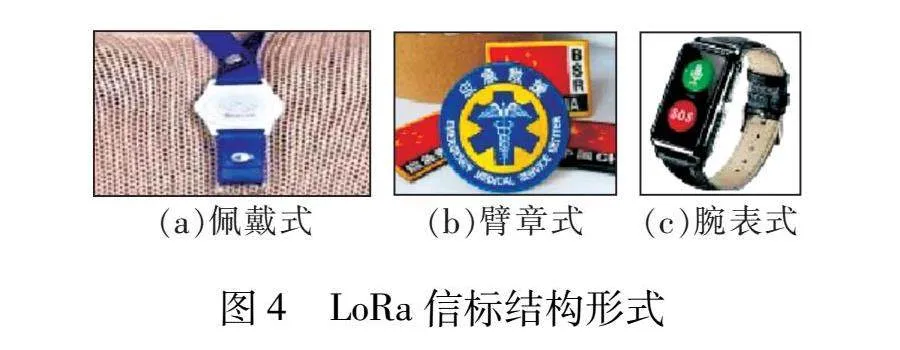
LoRa信标根据应用场景和使用方式的不同,按照佩戴式、腕表式、臂章式及外挂式多种结构设计,如图4所示。还可根据需要采集人体生命体征数据,LoRa信标支持RSSI(Received Signal Strength Indicator,接收信号强度指示定位法)信号强度指示功能,可应用于测距、评估信号质量、改善通信网络等多种操作。
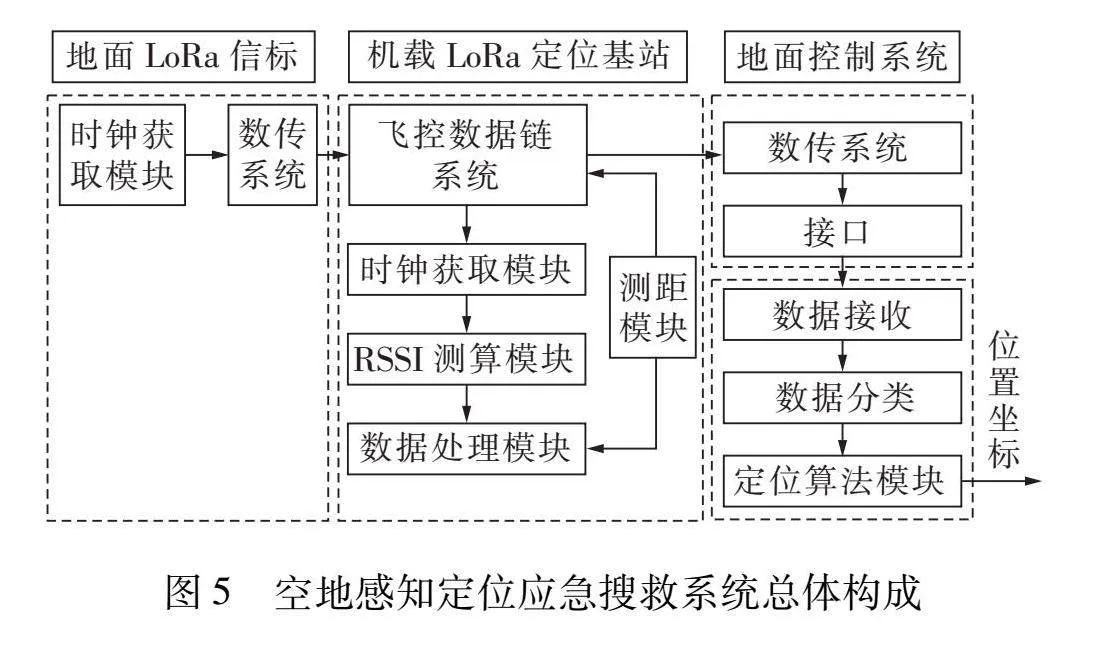
地面控制系统是使用者对搜救无人机进行任务规划和运行状态监控的系统,包括飞行配置、飞行模式、航线规划、定位算法模块、自动归航5部分,其平台框架如图5所示。
机载LoRa基站接收到LoRa信标反馈的数据,通过JAT接口传输至无人机飞控系统后,数传系统持续将数据传送至地面搜救平台。
地面控制系统包含数传系统、数据接收、数据分类及定位算法模块,对接收到的数据进行逐级处理,最终计算出LoRa信标位置坐标,并在地面搜救平台地图界面上进行呈现,如图6所示。
2.3 系统运行流程设计
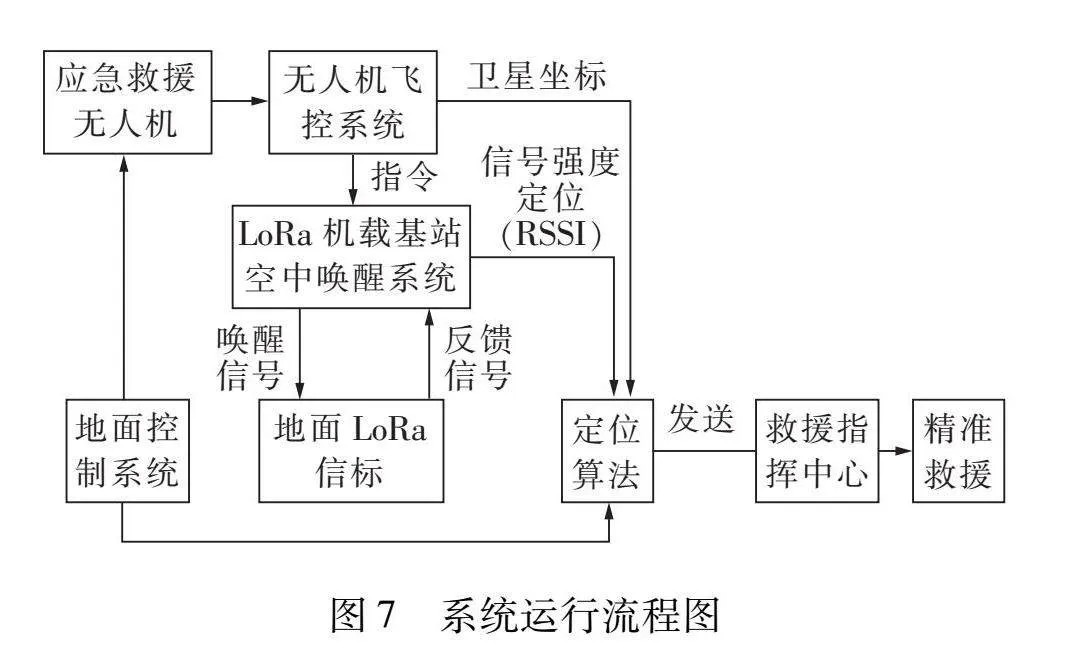
空地感知定位应急搜救系统在执行任务时,地面远程控制应急搜救无人机到达目标区域后,通过无人机飞控系统发送指令至机载LoRa基站,并启动空中唤醒功能;机载LoRa基站会以广播形式不断向地面发送唤醒指令;当地面LoRa信标接收到唤醒指令后将立即启动进入信号接收状态,并向外界发送反馈信号。此时,机载LoRa基站根据信号强度判定信标位置并反馈到飞控系统,结合无人机卫星定位系统,通过算法功能精确计算出个人信标位置坐标,最终将坐标数据发送至救援指挥中心,地面救援队伍根据指挥中心指令第一时间实施精准搜救作业,其系统运行流程如图7所示。
3 空地感知定位搜救关键技术及应用
3.1 无人机技术
无人飞行器(Unmanned Aerial Vehicle,UAV)俗称无人机,是无人驾驶飞机系统(Unmanned Aircraft System,UAS)的组成部分,UAS包括一架无人机、一个地面控制器,以及两者之间的通信系统。
3.1.1 工业无人机
无人机按照主要用途分为消费级和工业级两类。工业无人机可替代人类在无法接触或到达的复杂环境中工作,具有高效、精准、便捷的优势,人员可远程操控其飞行或使其自主飞行,实现数据的精准采集、存储及传输,其具备较强的航线适应性和抗恶劣环境的能力。
工业无人机的主流应用场景基本上已经比较明确和清晰,比如消防应急、空中运输、巡检、安防等领域,集中度较高,但目前产品性能并不能很好满足应用需求,许多关键技术仍待突破。
3.1.2 应急救援无人机
救援具有黄金期,抢时间就是抢生命。传统救援主要依赖于车辆、船只等,而采用无人机实施空中救援有很好的灵活机动性,部署方便快捷,地面人员可远程操控,提高了救援效率,另外还可通过空中运输应急救援物资到达灾区。1)城市消防。在城市环境中,应急救援无人机通过搭载光电吊舱对地面的火情或事故现场进行巡查、拍摄并将画面实时回传至救援中心或前指中心,为救援方案的制定与实施提供决策依据。2)森林消防。
在户外森林环境中,无人机替代森林巡护员,搭载光电吊舱低空巡查,对火情发展趋势进行拍摄侦查,对地面火灾复燃进行巡护,能够长时间巡航,是人工巡护所不能相比的,还可以为消防救援人员空投应急食品、饮用水和单兵灭火装备等物资。3)自然灾害救援。
针对自然灾害频发,应急救援无人机作为平台型产品,可针对不同灾害实施多种救援。疫情期间可实施空中喷雾消杀;洪涝灾害期间可空中喊话疏散、夜间空中照明或者抛投救生圈等;地震灾害期间可巡查搜索人员,机载空中基站可提供应急通信保障等。
3.2 空中唤醒技术
WOR(Wake On Radio,无线唤醒)技术是通过减少接收端射频处于接收状态的时间,而在其余时间使设备处在深度睡眠模式来降低设备整体功耗。LoRa信标周期性自动醒来搜寻空中无人机载LoRa基站发出的呼叫信号。如果无呼叫信号,LoRa信标会继续进入睡眠状态以降低功耗;如果出现呼叫信号,LoRa信标会被唤醒并进入信号接收状态。因此,在空中没有呼叫信号时处于睡眠状态,LoRa信标的平均功耗明显降低,以此实现长续航待机。
3.3 LoRa感知定位技术
LoRa技术是通过到达时间差(Time of Arrival,TOA)或到达时间差测量(Time Difference of Arrival,TDOA)的原理实现地理定位。2020年,郭建新等人构建了基于LoRa无线物联网通信的海上作业人员定位系统,其主要依靠北斗定位通信链路技术和AIS-MOB(AIS便携式应急示位标)技术来实现定位,但LoRa技术仅仅用于数据的传输[20]。2021年,李露等学者利用LoRa的通信优势,进行了基于北斗定位与LoRa无线技术的野外搜救监测系统的设计及研究,在定位方面未开展相关研究[21]。2020年,许璐等人提出了一种基于LoRa技术融合RSSI和TOA的户外定位方法,通过多种方式提高定位准确性,且经实测证明了其可用性,但仍存在精度不高和数据传输复杂的问题,需要在算法、实测及网关等方面进一步提升定位精度[22]。
当LoRa信标需要定位时,LoRa定位技术可以借助空中无人机卫星定位系统与卫星定位技术的结合,将采集到的GNSS(Global Navigation Satellite System,全球导航卫星系统)信息通过机载LoRa基站传输到后台,经过计算或数据库查询来确定其相对于卫星的位置。理论分析和实验结果表明,融合RSSI和TOA的定位方法能够有效筛选数据,且定位误差减小了20%,稳定性较高,可用于户外定位,定位精度在半径20~200 m范围,满足搜救工作的开展需求。
3.4 无人机卫星定位技术
无人机飞行主要依赖于飞控系统,飞控系统一般内置了控制器、陀螺仪、加速度计和气压计等传感器,无人机便是依靠这些传感器来稳定机体,再配合北斗、GPS及气压计数据,便可将无人机锁定在指定的位置和高度[23-24]。无人机定位是通过其携带的GPS或北斗定位模块接收全球导航卫星系统信号,通过相应计算和转换获得当前位置信息。户外复杂环境开展紧急搜救使用卫星导航系统定位会产生较大误差,为了降低误差对定位结果的影响采用Kalman滤波方法[25]。考虑Kalman滤波器在预测模型不能很好估计状态向量时可能出现计算错误的问题,研究采用自适应健壮Kalman滤波算法,可以很好地将定位误差控制在可接受范围内。
3.5 系统应用及效果分析
为验证空地感知定位应急搜救系统的实际效果,选定陕西省某林业局管辖的秦岭南麓片区作为测试区域。该区域面积广阔,号称秦岭中的“死亡之谷”,已连续5年失踪46人。此地复杂的地形致使人工搜救工作开展困难重重,还增加了卫星定位设备和卫星电话使用的难度。鉴于此,研究人员与该地区某林业局联合,将该系统应用于秦岭南麓片区的应急救援任务中。
3.5.1 应用场景介绍
根据应急搜救任务需求,该应急搜救系统以四旋翼无人机搭载LoRa基站作为天空端设备,以地面控制系统和人员佩戴式LoRa信标作为地面端系统。天空端搜救无人机续航时间为50 min,巡航速度按照15 m/s设计,同时搭载喊话系统,可远程对地面搜救人员进行喊话指导;机载LoRa基站采用国内知名品牌模组,电源采用无人机动力电源转换供电,2架无人机A1和A2分别配备地面控制系统,在林区选择合适的位置控制无人机的起降;LoRa信标以挂牌式设计,电源采用纽扣电池供电,佩戴于搜救人员身上。应急搜救任务在选定的2个地点进行,2架搜救无人机A1、A2在200 m高度以盘旋式、地毯扫描式等飞行方式开展目标搜索。
3.5.2 效果分析
系统于上述复杂环境下的应急救援工作中,圆满完成了一系列搜救任务。考虑本次搜救过程所使用的无人机、机载 LoRa 基站和 LoRa 信标等均是依据任务需求进行配置,且皆为固定电源供电,其性能等参数为固定值。故而,结合实地验证所获取的数据,着重对空地感知定位搜救系统中LoRa信号传输效果、LoRa定位效果以及系统的整体作业效果展开分析。1)LoRa信号传输效果。
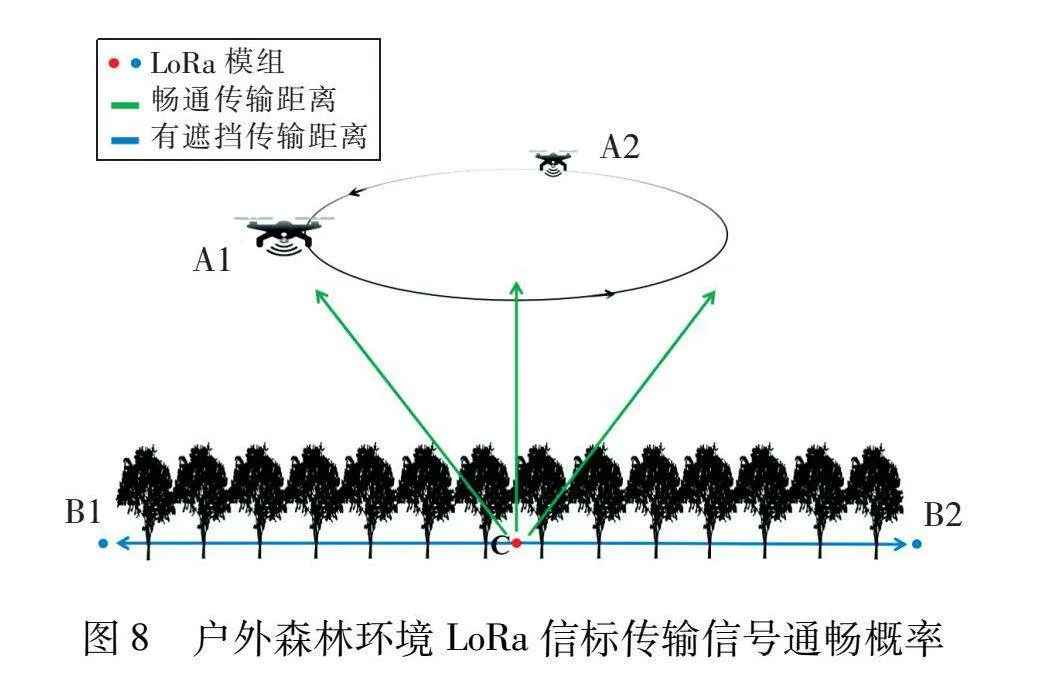
在密林、疏林、空旷草地环境下,LoRa信标无线信号由常规的横向穿越传输改变为面向天空的纵向传输,或者只接收天空方向的信号;在密林环境中,地面向天空的遮挡物相对较少,对于LoRa信标无线信号的遮挡干扰降低,信号衰减也随之减少。
在天空端由无人机挂载LoRa基站,以低空盘旋式、地毯扫描式等飞行方式进行目标搜索,大幅度增加了2个LoRa模组间无遮挡通信的概率。同时,通过图8可以清晰地对比出来,在户外森林环境中LoRa信标C与LoRa信标B1、B2之间的通信距离几乎全部处于遮挡区域之内。LoRa信标C与机载LoRa基站A1、A2之间的通信只有20%~30%之间的距离是处于遮挡区域之内,其余70%~80%的距离是处于空旷无遮挡区域,如图中绿色箭头部分所示,并且随着无人机不断地改变飞行位置,传输信号通畅的概率也随之增加,那么针对疏林和空旷草地这种空地感知定位的方法效果就更为突出。
此结果与2022年唐政权等[26]基于433 MHz LoRa信号的森林传播特性研究中的结果基本一致。即在复杂户外环境中,无论是地形的阻碍、信号的衰减还是其他干扰因素,LoRa信号都显示出良好的传输效果。
2)LoRa定位效果。
在搜救任务中,当机载LoRa基站接收到地面LoRa信标的反馈信号后,系统根据RSSI算法能够初步判断地面LoRa信标的大概位置;当无人机飞行至地面LoRa信标正上方或者飞行至无遮挡角度时,飞控系统在RSSI信号最强的时候对无人机坐标可进行一次记录,同时将坐标实时回传至地面控制系统进行显示,并结合无人机的坐标位置自动修正地面信标的坐标位置。经过上述多次修正后定位精度逐步提高,最终会将地面信标位置锁定在一定的范围之内,这为本次应急搜救工作提供了及时准确的坐标信息。结果表明,复杂场景中LoRa技术与无人机飞控系统的卫星定位技术结合使用,定位精度显著提高。
此次应急搜救工作,在林区200 m高度的飞行环境中,A1、A2无人机均按照1 km和1.5 km范围的搜索半径飞行开展搜救,根据系统获取的数据经测算分析,在任务开始后的第8分钟,地面搜救平台RSSI定位算法模块测算到的位置坐标和2架无人机实际的位置坐标趋于接近,因此可判断出该坐标点即为地面LoRa信标的坐标位置,故地面人员位置可以锁定。
4 结语1)利用LoRa技术低功耗、感知唤醒的特性,针对户外复杂应急救援场景设计的地面LoRa信标结构轻便,可方便佩戴附属在人体或物体表面,且能够实现长续航,解决了现有设备待机时间短、携带不便的问题。2)基于LoRa技术到达时间差测量定位特性,通过无人机飞控系统提供的实时卫星定位坐标数据,结合地面搜救平台的定位算法模块,可估算出LoRa信标位置坐标;随着无人机的对地扫描飞行,最终位置坐标趋于收敛,锁定在一个稳定的范围之内。通过以上测算的坐标数据准确性大幅提升,定位精度半径在20~200 m范围,能够满足户外搜救工作的开展需求。3)应急搜救无人机对于低空搜索具有突出优势,等同于将无人机作为现有卫星定位模式的中继,提出的基于LoRa技术创新应用方案通过借助空中应急搜救无人机,规避了在户外复杂环境中地面多径效应对于信号传输的影响和遮挡,同时增加了信号接收的空间维度,传输效率大幅度增加,从而提高了定位的精度,也满足户外森林、山谷等复杂环境的实战应用需求。
参考文献:
[1] 《自然灾害情况统计调查制度》《特别重大自然灾害损失统计调查制度》解读[N].中国应急管理报,2024-04-30(3).
[2]朱婧,孙新章,何正.SDGs框架下中国可持续发展评价指标研究[J].中国人口·资源与环境,2018,28(12):9-18.
[3]张耀南,田琛琛,任彦润,等.自然灾害应急响应科学数据工程体系建设[J].数据与计算发展前沿,2024,6(01):46-56.
[4]王京北,杨乃定.大型城市安全管理现状及对策研究——以西安市为例[J].技术与创新管理,2019,40(03):384-389.
[5]郑学召.矿井救援物联网灾后重构与关键信息实时感知技术装备研究[J].技术与创新管理,2023,44(02):108.
[6]王凤婷,高建清,林楠,等.基于uni-app的自然灾害应急信息发布系统设计与实现[J].电脑编程技巧与维护,2024(04):85-87+118.
[7]王敬平,姜鑫,褚少鹤,等.北斗卫星导航系统定位精度研究[J].软件,2019,40(10):152-154.
[8]郭树人,李罡,来欣,等.以北斗为核心的国家全球应急搜救系统思考(特邀文章)[J].全球定位系统,2023,48(05):1-7.
[9]AUGUSTIN A,YI J,CLAUSEN T,et al.A study of lora:Long range & low power networks for the internet of things[J].Sensors,16(09):1466.
[10]ZAFARI F,PAPAPANAGIOTOU I,HACKER T J.A novel bayesian filtering based algorithm for rssi-based indoor localization[C]//In 2018 IEEE International Conference on Communications(ICC),2018.
[11]SAMADH S A,LIU Q,LIU X.Indoor localization based on channel state information[C]//In 2019 IEEE Topical Conference on Wireless Sensors and Sensor Networks(WiSNet),2019.
[12]黄瑞金,沈富强,周兴霞,等.无人机集群灾情地理信息获取关键技术及重大应用[J].测绘通报,2019(06):96-99+104.
[13]王延文,王尔申,赵志杰,等.基于北斗的远程环境监控系统的研究与设计[J].电子器件,2018,41(03):698-702.
[14]孙兆.探寻低空经济“腾飞”之路[N].中国经济时报,2024-05-07(3).
[15]毕凤仪.基于旋翼无人机的航磁测量系统磁干扰补偿技术研究[D].长春:吉林大学,2024.
[16]VASHISHT S,JAIN S,AUJLA S G.MAC protocols for unmanned aerial vehicle ecosystems:Review and challenges[J].Computer Communications,2020,160(Prepublish):443-463.
[17]李欣,高山林,王涵,等.基于LoRa技术的智能监测系统设计与实现[J].海军工程大学学报,2024,36(01):15-21+28.
[18]熊润群,张华俊,梁川,等.一种多无人机辅助的LoRa网络节能数据采集方法[J].计算机学报,2024,47(08):1970-1987.
[19]刘金鑫.重大自然灾害应急资源调配群决策支持系统研究[D].长沙:中南大学,2012.
[20]郭建新,李智,黄祥声,等.基于LoRa无线物联网通信的海上作业人员定位系统研究[J].风能,2020(08):76-79.
[21]李露,胡乃瑞,王君祎.基于北斗定位与LoRa无线技术的野外搜救监测系统设计[J].电子器件,2021,44(02):428-433.
[22]许璐,陈曦,丁子璇,等.基于LoRa技术融合RSSI和TOA的户外定位方法[J].测控技术,2020,39(10):41-46.
[23]陈鹏震,吴怀宇,陈洋.基于动态运动基元的微小型四旋翼无人机路径规划[J].高技术通讯,2016,26(02):186-194.
[24]卓映紫,陀艳,张文鑫.无人机飞行乘风而起[N].广东科技报,2023-12-01(2).
[25]WANG X,LIANG M.GPS positioning method based on Kalman filtering[C]//2018 International Conference on Robots amp; Intelligent System(ICRIS).IEEE,2018:77-80.
[26]唐政权,杨磊,周雯.基于433 MHz LoRa信号的森林传播特性研究[J].林业工程学报,2022,7(05):156-160.
(责任编辑:王强)
猜你喜欢
电脑知识与技术(2016年28期)2016-12-21 12:21:32
电子技术与软件工程(2016年19期)2016-12-19 18:28:28
科技创新与应用(2016年33期)2016-12-17 13:31:31
新教育时代·教师版(2016年27期)2016-12-06 18:14:59
中国科技纵横(2016年17期)2016-11-30 11:51:57
农机使用与维修(2016年10期)2016-11-10 09:45:55
人间(2016年26期)2016-11-03 17:52:40
中国科技博览(2016年22期)2016-11-01 18:10:31
科技视界(2016年22期)2016-10-18 14:30:27
企业导报(2016年9期)2016-05-26 20:58:26
