一种适用于输电线路跨线牵引无人机的飞行方案设计
2016-10-18 14:30王焘荣谌海云
科技视界 2016年22期
王焘荣 谌海云
【摘 要】输电线路带电作业专用的微型无人机在飞行中驾驶员难以对无人机进行及时有效的避障操控,对此本文设计了针对性极强的自主飞行方案,此方案算法简洁精炼,充分考虑了工程应用中的价值需求,具有很高的现实应用价值。
【关键词】无人机;自主飞行;工程应用
0 引言
在高压架空输电线路的检修作业中,传统方法是检修工人从杆塔底部攀爬到塔顶,再逐步移动到线路检修所在位置。这种方法繁琐低效,于是诞生了专用于电力检修的无人机跨线飞行策略。
此策略需要用无人机牵引一根无人机可负载的细导绳绕过输电线路,通过这根细导绳逐渐将更粗的导绳牵引绕过输电线路,重复此动作直到最后一根导绳绕过输电线路。最后这根导绳将把电力检修人员和检修设备拉到输电线路上,使其可进行电力检修作业。此策略中,目前对于无人机的飞行采用的是遥控手动控制,但无人机在抵近输电线路的飞行以及在输电线路之间的飞行中,存在肉眼难以远距离有效观测、高空气流环境复杂、无人机牵引导绳时惯性质量过大且导绳过长等因素,无人机驾驶员难以及时操控无人机使其避开输电线路。
据此,本文设计了一种专用于跨线导绳牵引无人机的自主飞行方案。
1 跨输电线路的飞行方案
图1为无人机靠近输电线路时情况。
以三线输电线路为例,三条输电线路分别为J1,J2,J3。J1和J2确定一个下平面H,无人机到J1的连线与H面的夹角为?兹1,无人机到J2的连线与H面的夹角为?兹2,无人机到J3的连线与水平面的夹角为?兹3。J1到J2的距离l为已知,?兹1、?兹2和?兹3可由机载系统测得。根据已知信息作图如下:
图2 无人机靠近输电线路时场景分析
图2中,d1为无人机所在点A到J1的距离,d2为无人机到J2的距离。图中大三角形为直角三角形,h为无人机到H面的垂直距离,l′为无人机到J1的水平距离,过J1点作AJ2的垂线h′。由此有:
自主飞行方案:①水平飞行使无人机在J1右下侧A点处;②无人机从A点竖直上升到H平面上方使其到H平面的竖直距离为h的B点处;③无人机从B点水平飞行至C点,悬停并释放导绳;④从C点水平飞行至右侧D点处,然后接上遥控信号,返航。飞行轨迹如图所示。
图3 三线输电线无人机绕J1跨线飞行方案
A点在J1右侧下方,B点在J1右侧上方,AB连线到J1的水平距离L′设定为无人机紧急壁障反应距离的1~1.2倍之间。B、C所在水平面设定为从H平面到J3之间,无人机顶部到H平面垂直距离设定为机身高度的1.2~1.4倍之间。C点到J1的水平距离为l的1/3~2/3倍之间。D点到J1的水平距离需根据现场风速、天气等因素设定,D点必须在B点右侧,需保证无人机返航过程中不接触到导绳。
2 飞行方案扩展
上述方案在应用到其他类型输电线路的跨线飞行与释放导绳的作业中时,只需要改变A、B、C、D的位置即可。
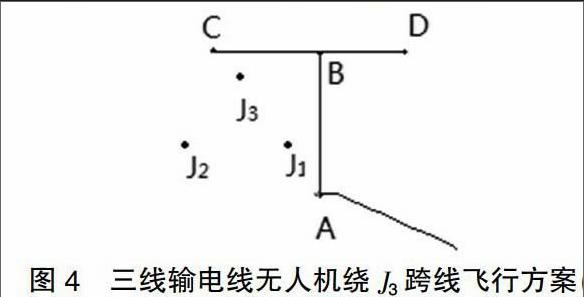
2.1 三线输电线路跨J3飞行
在自主飞行方案中,改变B点的水平高度为J3所在平面上方,无人机顶部到J3所在平面垂直距离设定为机身高度的1.2~1.4倍之间。C点所在水平位置设置为J3左侧l23的1/3~2/3倍处。飞行轨迹如图所示。对于绕J2飞行,只需把J2处理成J1即可。
2.2 多线路输电线路跨线飞行方案
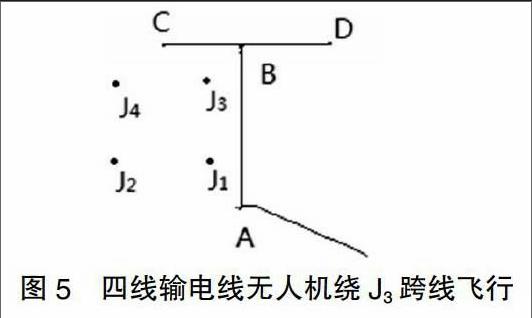
对多线路的输电线路,均可按照三线输电线路中J1和J3线的飞行方案飞行,以下是部分飞行方案路径图。
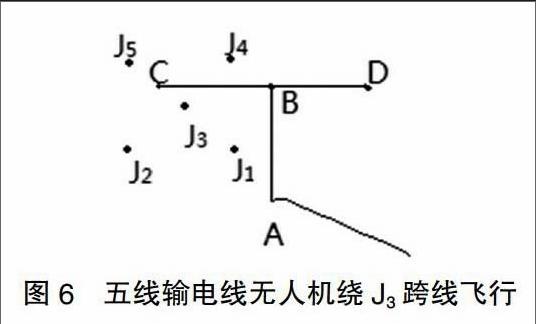
其他线路环境如五线绕J4以及六线或更复杂的线路情况下,均可按照三线、四线、五线等线路的飞行方案进行轨迹规划,此处不再赘述。
3 总结
本方案为针对无人机跨线飞行的嵌入式辅控飞行方案,与无人机飞控系统结合使用。本方案算法简洁精炼,运算量小,具有十分高的可移植性,适合于工程实际应用,在无人机的跨线飞行中可取得良好成绩。
【参考文献】
[1]胡涛,胡毅,李景禄,等.输电线路带电作业的安全防护[J].高电压技术,2006,32(5):22-25.
[2]王庆江,高晓光,符小卫.无威胁情况下任意两点间的无人机路径规划[J].系统工程与电子技术,2009,31(9):2157-2162.
[3]刘洋.动态环境中的无人机路径规划研究[D].西北工业大学,2015.
[4]符小卫,高晓光.一种无人机路径规划算法研究[J].系统仿真学报,2004,16(1):20-21.
猜你喜欢
东方教育(2016年13期)2017-01-12
建筑建材装饰(2016年11期)2016-12-29
人间(2016年26期)2016-11-03
考试周刊(2016年47期)2016-06-29
考试周刊(2016年17期)2016-03-31