基于工业机器人的数控机床上下料工作站集成之机电系统设计
2024-12-06 00:00:00刘彩霞杨春
包头职业技术学院学报 2024年4期





摘 要:文章顺应“中国制造2025”发展战略,响应企业提出的经济、高效、节能的“无人化”的智能制造模式,以充分利用实训室现有设备为基础,分析HTC2050z车削中心的结构、参数、加工方式,采用数控机床PLC的I/O进行工业机器人和数控机床信号交互方式集成上下料工作站,主要进行工业机器人选择、上下料台的设计与制造、末端执行器的配置、气动线路的设计、装调及包含供电电路、启停电路、急停、模式切换电路、机器人与机床之间I/O信号交互电路的电气控制系统设计与装调。应用构思—设计—装调—试验—改进的方法实现上下料工作站机电系统设计与装调。该方案不仅充分的利用现有的设备,节约了成本、提高了效益,还促进了项目团队的工程实践能力。
关键词:工业机器人;数控机床; 上下料工作站;机电系统
Electromechanical System Design of CNC Machine Tool Loading
and Unloading Workstation Integration Based on Industrial Robot
Liu Caixia1 Yang Chun2
(1.Computer Numerical Control Technology Department,Baotou Vocational amp; Technical College,Baotou,Inner Mongolia 014035;
2.Initial Installation Plant,Baotou Beifang Chuangye Co.,Ltd.,Baotou,Inner Mongolia 014032)
Abstract:This paper conforms to the development strategy of “Made in China 2025” and responds to the “unmanned” intelligent manufacturing mode put forward by the enterprises.Based on making full use of the existing equipment in the training room,this paper analyzes the structure,parameters and processing mode of HTC2050z turning center,and adopts the I/O of CNC machine tool PLC to use the industrial robot and CNC machine tool signal interaction to integrate the loading and unloading workstation.It mainly focuses on the selection of industrial robots,the design and manufacture of loading and unloading platforms,the configuration of end effector,the design and installation of pneumatic circuits,and the design and installation of electrical control systems including power supply circuits,start-stop circuits,emergency stop circuits,mode switching circuits and I/O signal interaction circuits between robots and machine tools.The method of conception-design-adjustment-test-improvement is applied to realize the design and adjustment of the electromechanical system of the loading and unloading workstation.This scheme not only makes full use of the existing equipment,saves costs and improves benefits,but also promotes the engineering practice ability of the project team.
Key words:industrial robots;CNC machine tools;loading and unloading workstation;electromechanical system
工业机器人可靠性高、灵活性大、精度、速度高,在工业生产中得到广泛的应用,已是智能制造系统中关键组成部分。我国很多企业的生产线上,数控机床上下料仍由人工完成,使得工人劳动强度大、生产效率低,且有一定的危险,已经满足不了当前智能制造快速发展的需求。为降低成本、提高工作效率,适应智能制造生产需求,有必要根据数控加工生产工艺,参照机床结构,结合工业机器人技术,采用工业机器人装卸工件代替人工上下料,来提高生产效率和节拍。当工件工艺改变时,智能制造很容易适应需求,有利于企业不断生产新品种,提高产品质量与生产率,更好地适应市场竞争的需要。[1]随着“中国制造2025”的提出,使得中国制造业转型升级已上升为国家战略。[2]而中国制造业的转型升级急需德智体美劳全面发展的综合性复合型的技术技能人才,基于工业机器人的上下料工作站集成是将知识、技能转换工程实践的有利方法,可助力教师团队工程实践能力的快速提升,并能转化到学生教学中,提升学生的实践技能。
1 问题提出
实训室有HTC2050z车削中心,该设备具有优良的可靠性及精度保持性,主轴精度高,刚性强,可实现无级调整及恒速切削,该数控机床采用的是FANUC 0i-TC数控系统。在加工时都是由人工来进行毛坯的装夹,加工后由人工取料放到指定位置。现在升级改造该设备实现工业机器人自动上下料,即在加工前由工业机器人从上料台取毛坯装夹到数控车床主轴上,加工后由机器人取成品件放回到下料台。设备整体调试好后,在自动方式实现自动上料—机床加工—自动下料工作过程。为了可靠实现自动上下料,需要对机床原有部分进行改造升级,一是当机器人到机床旁,机床能自动开门,离开时能自动关门,二是机器人给机床三爪卡盘上料时卡盘自动松开,上料后可自动夹紧。
2 方案设计
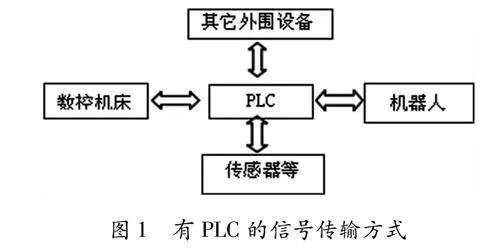
在升级改造或集成中一般情况对于所需I/O信号少的可采用机床和机器人直接信号传输方式,所用信号多时可采用Profinet、Profibus等现场总线方式。[3]经过分析考虑到经济实用性,主要有两种设计方案,方案一:PLC作为工业机器人、数控机床及各外围设备传输信号的纽带,采用Profinet等现场总线方式进行信号交互,如图1所示,所有信号传送给PLC经过处理后再传送到所需要的位置或设备中。方案二:不需要PLC,主要由数控机床的PLC和工业机器人通过设备本身的I/O进行信号传输,其它的传感器类信号可以根据需要由机床PLC处理或机器人进行处理,如图2所示。
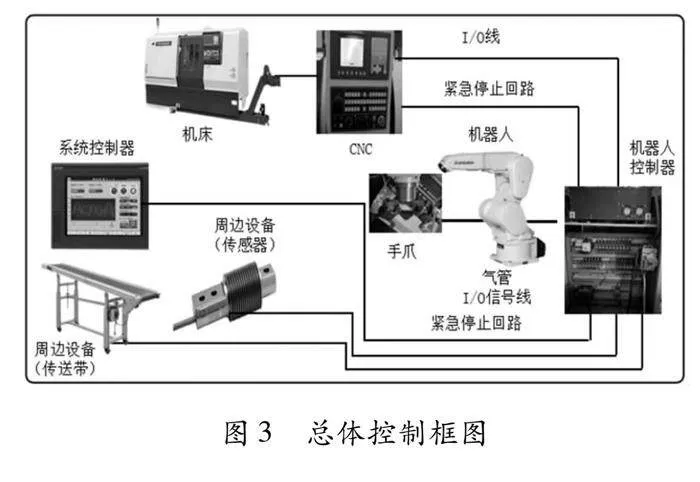
在本方案中充分发挥现有设备的最大利用率及经济实用性,选择方案二由数控机床的PLC和工业机器人通过设备本身的I/O进行信号传输,设计的总体控制框图如图3所示。
3 机械结构设计与升级
3.1 工业机器人选择
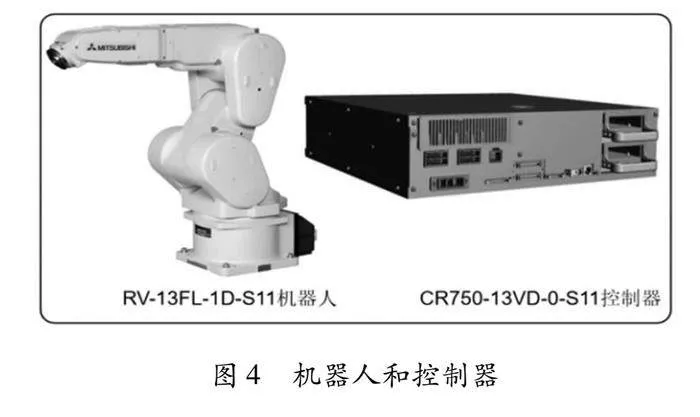
首先选择工业机器人,通过比对并参考该车削中心加工的轴类零件的最大直径和长度,考虑到实训室现有的机器人,选择型号是RV-13FL-1D-S11三菱机器人作为上下料机器人。查阅参数得知该机器人的工作范围是1388mm,搬运重量是13kg,根据机床参数分析得出选择该机器人满足加工工件上下料载荷及工作节拍要求,配置的是CR750-13VD-0-S1控制器,机器人及控制器如图4所示。
3.2 上下料台设计
考虑到经济实用性及方便性,本工作站设计制造了相对简易的上下料台,如图5所示。
3.3 三爪卡盘防碰撞设计
在机械结构上还需对三爪卡盘进行适当的改变,当机器人自动给三爪卡盘上料和下料时,不能直接检测到工件是否到达三爪卡盘的底部,考虑到数控机床及三爪卡盘本身空间结构、安装传感器等不方便及改动较大,所以在三爪卡盘里装了一个类似防碰撞的垫铁[4],以防机器人将工件放到三爪卡盘里过深,再利用机器人本身具备的防碰撞功能,在上料时可有效的规避碰撞。
3.4 末端执行器选择
在本集成制造系统中主要用来抓取较短的盘轴类零件,为了可靠抓取,选用三指夹钳式取料手,同时为了提高工作效率,安装两个手爪。抓取时工作过程如下:一个空手爪到上料台抓取毛坯并运行到机床前等待→用另一个空手爪抓取机床里已加工完的工件→两个手爪交换将毛坯放到三爪卡盘里→机器人返回到机床外→将已加工工件放到下料台上。
3.5 气动控制线路设计
完成自动上下料需要进行气动控制线路的设计,数控机床的三爪卡盘采用的是液压自动控制,而安全门是手动控制,所以需要对安全门进行设计,当机器人到机床前时安全门自动开且开到位置,机器人进行上料或下料,当上料完成机器人离开数控机床后,安全门应该自动关闭且数控机床启动加工工件,在加工过程中,安全门不能打开,只要安全门一打开,数控机床应该自动停止工作。可以采用两种控制方式:液压控制或气压控制,考虑到门的自动开和关,属于轻载运行,另外气动控制经济、简便、对环境污染少,所以此处改为气动控制,需要在安全门的上方加装气缸及安全门开或关到位信号传感器。除此之外工业机器人的末端执行器也需要气动控制,由于是两个三指夹钳式取料手,所以气路到手爪段分出两路气路即可,如图6所示。
数控机床安全门的开、关控制气泵—气动三联件—电磁阀(消声器)—单项调速阀—气缸(装有安全门开到位和关到位限位开关)—数控机床安全门。
机器人手爪张开与闭合
气泵—气动三联件—电磁阀排(消声器)—单项调速阀—机器人手爪。
4 电气控制系统设计
方案采用工业机器人和数控机床的PLC通过I/O实现信号传输。现需要利用数控机床电气控制柜及机器人控制器重新进行电气控制系统设计。首先进行电气原理图整体连接框图的设计,以三菱机器人控制柜CR750为基础的电气连接框图如图7所示。
在该集成工作站中,需要连接的接口主要有:
ACIN连接器,控制柜交流电源(单相,AC200V)输入;CNUSR 连接器,机器人专用输入输出连接,连接外部设备与机器人的输入输出信号;SLOT1,选购件插槽,此处连接数控机床的I/O,用于交互机器人与数控机床的I/O信号;LAN 连接器,连接触摸屏;电机电源连接用连接器AMP1、AMP2,输出给机器人的动力电源;电机信号连接用连接器CN2,机器人反馈编码器信号。
4.1 供电电路及启动电路设计
供电电路的设计原则是合上总开关QF1,经过控制变压器TM1将380V交流电变换成220V的交流电,再加一低压断路器QF2后分成两路,一路是按下控制柜上的启动按钮SB5,使得继电器KA1及KA2得电并自锁,电路中的KA1闭合输出交流220V,连接到机器人控制柜的ACIN接口,为机器人提供220V交流电。另一路是连接到VC1开关电源,将AC220V整流输出DC24V,给PLC、触摸屏、继电器等提供直流电源。同时还需设计对应的指示灯,当合上QF1、QM1、QM2,总电源指示灯HL4亮,按下SB5启动按钮,驱动电源指示灯HL5亮,KA3继电器得电暂停指示灯黄灯亮、KA30继电器得电报警指示灯红灯亮,运行后绿灯亮。
4.2 急停、模式切换电路设计
在进行工作站组建时,外部紧急停止、门开关输入及可用设备的端子处于开放状态。工作站必须设计外部紧急停止、门开关等装置,起到安全防护作用,必须在连接了这些设备的状态下使用机器人。一是在CNUSR1中有两处可连接外部急停按钮,分别对应端子号(2、27)和(7、32),这两个端子在内部是联通的,所以可在外部电气柜等多处连接急停按钮,在紧急时方便及时按下任一急停按钮,紧急避免一些事故发生。二是为了安全,在工业机器人工作站的安全防护栏的出入门上需要安装门开关或光栅等,当门打开后,机器人等运动装置自动停止,只有门是关闭状态时,机器人等运动装置才能启动运行。在CNUSR1中有两处可连接门开关,分别对应的端子号(4、29)和(9、34),在这两个端子号上可连接对射光电开关或光栅等。若不连接将此两个端子号分别短接。三是自动和手动模式设计,同样CNUSR1中的端子号(49、24)和(50、25)是模式切换开关输入功能,当这两个端子断开时是手动模式,闭合是自动模式,可在这两个端子上安装选择开关,实现自动和手动切换。当在自动时通过外部设备如触摸屏启动工作站。当在手动时直接用机器人示教器控制工作站。如图8所示。
4.3 机器人与机床之间I/O信号设计与连接
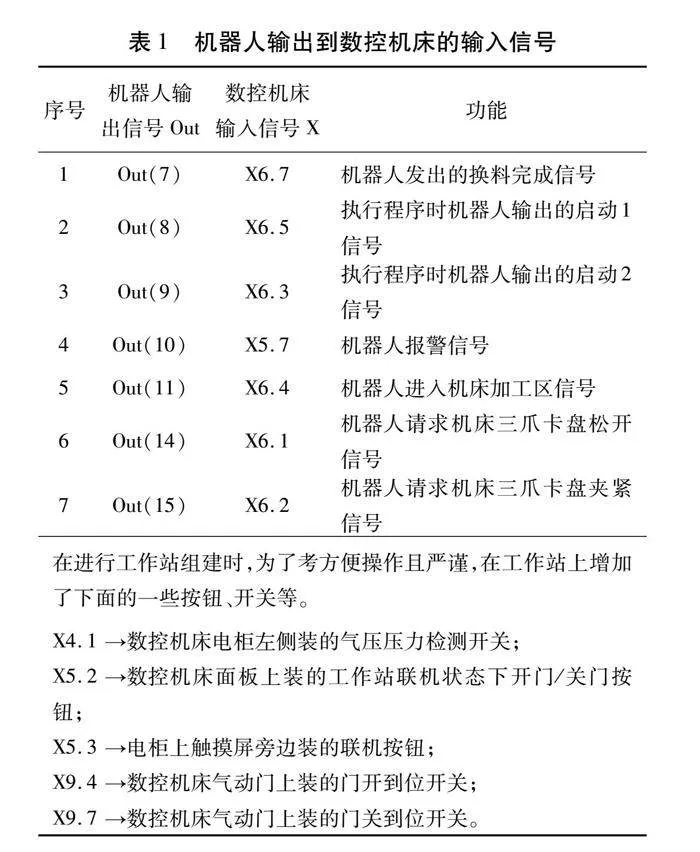
在SLOT1接口中的插入2D-TZ368/2D-TZ378接口通过线缆和机床的CE57A、CE56A的I/O信号连接实现交换,工业机器人和数控机床需要交换的信号分为两方面,一是机器人输出到数控机床的输入信号,二是数控机床输出到机器人的输入信号,需要的信号列表如下。
机器人输出到数控机床的输入信号,如表1所示。
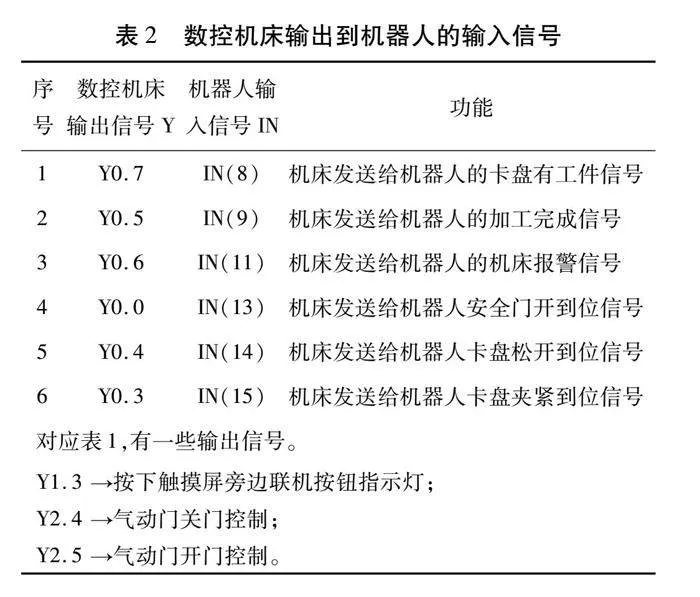
数控机床输出到机器人的输入信号,如表2所示。
信号传输过程同机器人输出到数控机床的输入信号过程,此处不再赘述。
5 结论
本文针对实验室的车削中心,提出了不用配置额外的PLC,用数控机床的PLC和工业机器人通过I/O进行信号传输的方案,并进行安装、调试,最后实现由机器人给数控机床上下料的可靠控制。主要进行了机械结构设计与升级和电气控制系统设计。选择了满足机床加工载荷实现搬运的三菱工业机器人;其次进行了上下料台的设计、制作和安装;第三在数控机床的三爪卡盘底端增加垫铁实现防碰撞功能,第四选用两个三指夹钳式取料手,提高上下料效率;采用气缸加限位开关实现机床门的自动开关及开到位、关到位功能。在电气控制系统中设计了供电电路及启动电路、急停、模式切换电路、机器人与机床之间I/O信号电路设计与连接。用最经济的方式实现了基于工业机器人的数控机床上下料工作站集成的机电系统设计。
参考文献:
[1]陈运军.基于工业机器人的“智能制造”柔性生产线设计[J].制造业自动化,2017,39(8):55-57、64.
[2]陈奎,朱晓瑛.智能制造背景下工业机器人CNC机床上下料工作站设计[J].电子制作,2023,31(22):83-88.
[3]曹锦江,高世平.基于EtherNet/IP工业以太网的FANUC机器人上下料单元系统集成应用研究[J].机床与液压,2022,50(24):94-101.
[4]晨芳,宋鹏,丁中华.基于工业机器人和数控车床的自动上下料工作站[J].机械制造,2019,57(12):45-47.
(责任编辑 郭晓勇)
猜你喜欢
制造技术与机床(2019年12期)2020-01-06 03:17:26
制造技术与机床(2018年12期)2018-12-23 02:41:20
电子制作(2018年10期)2018-08-04 03:24:46
电子制作(2017年20期)2017-04-26 06:57:41
科技创新与应用(2016年34期)2016-12-23 19:10:06
中国高新技术企业(2016年31期)2016-12-22 09:19:31
科技创新导报(2016年21期)2016-12-17 12:23:00
中小企业管理与科技·下旬刊(2016年10期)2016-11-18 20:57:34
科技视界(2016年23期)2016-11-04 19:59:41
科技视界(2016年18期)2016-11-03 23:15:51