基于虚拟样机的工业机器人末端液压夹持器的设计
2016-12-17 12:23沙鑫美范真
科技创新导报 2016年21期
关键词:工业机器人
沙鑫美+范真
摘 要:在中国制造2025的大背景下,中国工业机器人或将迎来井喷式发展,传统的工业机器人设计方法已经不能满足市场快速变化的需求。为了适应这一新的需求,该文从用虚拟样机技术的角度出发,利用SolidWorks软件对工业机器人末端液压夹持器进行设计研究。
关键词:工业机器人 虚拟样机 SolidWorks
中图分类号:TP241.3 文献标识码:A 文章编号:1674-098X(2016)07(c)-0001-02
目前,在我国人口红利减弱的背景下,工业机器人的应用将日益广泛。尤其是“十三五”期间以及更长时间内,我国将大力实施中国制造2025发展战略,重在发展高端装备制造,实施绿色制造、智能制造等科技产业化工程,其中研发智能化、模块化的机器人单元产品等关键技术,对于适应制造业规模化生产,提升我国制造业的国际竞争力意义重大。随着市场竞争的日益激烈,传统的工业机器人设计方法需要经过图纸设计、样机制造、性能测试等繁杂过程,存在研发周期长、成本高、转型慢等问题。
该文从虚拟样机的角度出发,利用三维设计软件SolidWorks对工业机器人末端液压夹持器的设计过程进行了系统性探索,建立了工业机器人末端液压夹持器的虚拟样机模型,并在此基础上对其进行运动仿真及受力分析,提出了一种高效的基于虚拟样机技术的工业机器人末端液压夹持器快速设计方法。
1 虚拟样机模型的建立
1.1 总体设计方案的确定
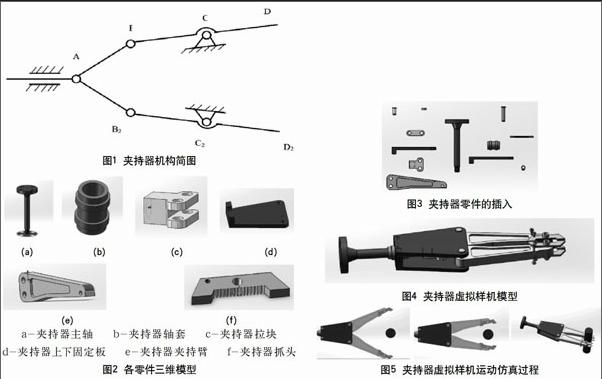
根据实际要求制定总体设计方案,确定夹持器主要设计参数如下:夹持工件大小(直径φ50mm);夹持工件重量(8 kg);手臂伸缩行程(300 mm);伸缩速度(120~200 mm/s);手指回转范围(0°~11°)。夹持器的总体结构方案如图1所示。
夹持器为一倒置的摇杆滑块结构,其工作原理为:当驱动器推动中心杆向右运动(滑块上A点向右运动)时,摇杆BC顺时针转动,迫使与支架相连接的手指CD向下,产生加紧动作和夹持力;当中心杆向左移动式(滑块上A点向左运动)时,摇杆BC逆时针转动,手指CD向上,实现松开工件。
1.2 零件的结构设计和参数化建模
为满足设计要求,需分别对夹持器的手指部分、手腕部分以及手臂部分进行受力分析、结构设计及强度校核,并利用SolidWorks软件进行实体建模,各零件模型如图2所示。
1.3 夹持器的虚拟装配
打开新建装配体命令,在进入生成装配体的界面后,点击“插入零部件”命令,插入各零件,如图3所示。装配时,先运用“移动零部件”“旋转零部件”命令将零件拖动至便于配合的合适位置,再根据实际情况在各零件间添加“重合”“平行”“垂直”“距离”“同轴心”等配合约束装配起来。装配时应该注意对于有相对运动的零件装配关系,应保留其独立运动以构成连接,并消除装配干涉。装配成的虚拟样机如图4所示。
2 运动学仿真
COSMOSMotion插件是集成在Solidworks中的运动分析和仿真模块,可对复杂机械系统进行运动学仿真和动态静力学分析,操作简单,容易掌握。将夹持器虚拟样机转入COSMOSMotion时,装配约束将自动转化为仿真模型的约束,添加必要的驱动力、工作阻力,建立仿真模型就可以模拟夹持器运行状况,并对其进行运动分析。夹持器的运动分为由液压缸驱动实现的主轴水平平移、由液压摆动缸驱动实现的主轴旋转以及由主轴水平平移带动的夹持臂旋转运动。仿真过程如图5所示。
3 夹持器受力分析
目前受力分析的有限元软件主要有ANSYS、ABAQUS、MSC等,考虑到夹持器结构较为简单,为避免不同软件三维模型转换带来的困难,该设计采用了SolidWorks专有的有限元分析模块SolidWorks Simulation,该模块使用有限元的位移公式在内部和外部载荷下计算零件的位移、变形和应力,计算后使用直接稀疏求解器或者是迭代求解器对其进行解算。
3.1 夹持器网格划分
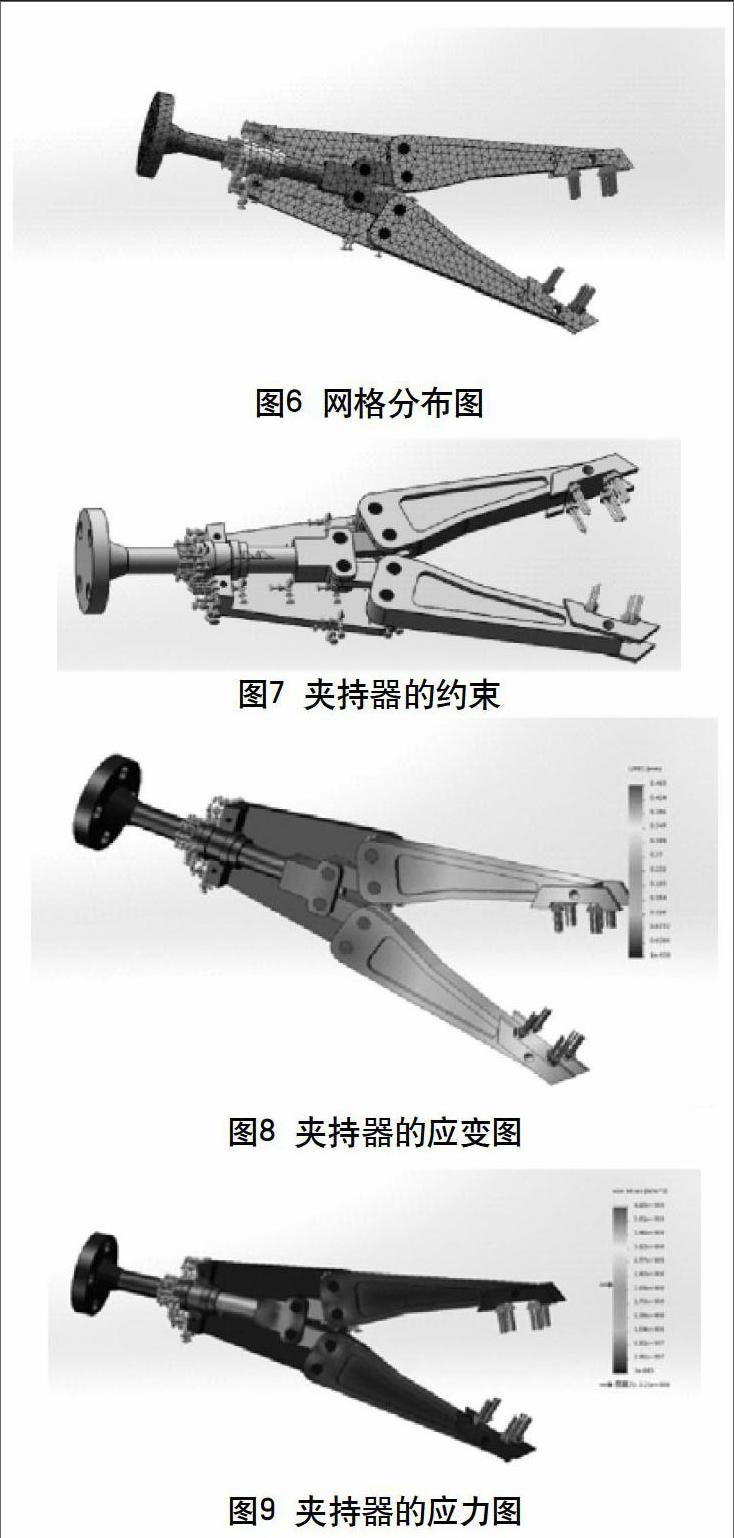
将夹持器样机模型导入SolidWorks Simulation模块后,利用Shell Manager工具对夹持器进行网格的划分。夹持器网格分布如图6所示。
3.2 夹持器约束施加
夹持器主轴末端主要是受轴承的径向约束和轴端的轴向约束,夹持器设计的手指类型是V形的,在这个部位受到的夹紧力是由所夹工件的重力而产生的。施加在夹持器上的约束见图7所示。
3.3 有限元分析结果
(1)夹持器的变形分析。
夹持器受力应变图如图8所示,夹持器变形最大处为抓头部分,最大的变形量是0.463 mm,变形量较小,因此不会对夹持器的工作性能产生影响。
(2)夹持器的应力分析。
夹持器所受应力图如图9所示,最大的应力值是221 MPa,产生于拉块处,但该应力值并未超过夹持器所选材料45号钢的屈服强度。
4 结语
该文利用SolidWorks软件建立了工业机器人末端液压夹持器的虚拟样机模型,并对其进行了运动仿真及受力分析,提出了一种以虚拟样机技术为基础的工业机器人末端液压夹持器设计方法,不但可以缩短开发周期,而且设计效率也得到了提高。
参考文献
[1] 殷国富.机械CAD/CAM技术基础[M].武汉:华中科技大学出版社,2010.
[2] 胡仁喜.SolidWorks2014有限元、虚拟样机与流场分析从入门到精通[M].北京:机械工业出版社,2014.
[3] 王建军,袁帮谊.基于虚拟样机技术的搬运搬运机械手仿真设计与研制[J].机械工程与自动化,2010(2):80-81.