
多自由度柔性机械臂非线性连续时变反馈控制方法
2024-08-28 00:00:00江峰苏麒
机械制造与自动化 2024年2期
关键词:自适应控制
摘"要:针对当前多自由度柔性机械臂控制过程中,机械臂定位控制系数选择合理性较低,导致多自由度柔性机械臂控制时延较长且运动轨迹与预设轨迹存在较大差异的问题,提出多自由度柔性机械臂非线性连续时变反馈控制方法。将拉格朗日算子作为计算基础,以能量的方式构建多自由度柔性机械臂动力学模型。考虑到机械臂的负载状态,计算机械臂的重力矩,识别机械臂非线性连续时变反馈控制参数。设定非线性连续时变反馈控制规则,构建机械臂非线性控制器,实现机械臂定位控制。构建实验环节,实验结果表明:该方法可有效提升机械臂运动轨迹与预设轨迹的一致性,缩短机械臂定位控制时延,进一步提升机械臂应用效果。
关键词:自适应控制;多自由度柔性机械臂;反馈控制;连续时变;定位控制;动态面控制
中图分类号:TP24""文献标志码:A""文章编号:1671-5276(2024)02-0193-05
Nonlinear Continuous Time-varying Feedback Control Method for Multi-degree of Freedom Flexible Manipulators
JIANG Feng, SU Qi
(CNCCC Tongan City Industry Integration Construction Anqing Co., Ltd., Anqing 246003,China)
Abstract:In order to solve the long control delay of the multi degree of freedom flexible manipulator and the large difference between the motion trajectory caused by by low rationality of the selection of the positioning control coefficient of the multi degree of freedom flexible manipulator in the current control process of the manipulator, a nonlinear continuous time-varying feedback control method for the multi degree of freedom flexible manipulator is proposed. Based on the Lagrangian operator, the dynamic model of a multi DOF flexible manipulator is built in the form of energy. Considering the load state of the manipulator and the heavy torque of the manipulator, the nonlinear continuous time-varying feedback control parameters of the manipulator are identified. The non-linear controller of the manipulator is constructed by setting the nonlinear continuous time-varying feedback control rules to realize the positioning control of the manipulator. The experimental results show that the proposed method can effectively improve the consistency of the manipulator motion track and the preset track, shorten the manipulator positioning control delay, and further reinforce the application effect of the manipulator.
Keywords:adaptive control;multi-degree of freedom flexible manipulator;feedback control;continuous time-varying;positioning control;dynamic face control
0"引言
工业的发展是多种行业进步的基石,机器人的出现使工业的发展迈上了一个大台阶。自第四次工业革命起,工业发展走上了快车道,工业机器人成为影响人们生产、生活的重要设备。机械臂作为工业机器人中最为重要的一种机械装置,对其展开全面的研究对于工业的发展具有重要的科学价值与使用价值[1-2]。常见的机械臂机器人可简单地分为刚性机器人和柔性机器人。刚性机械臂具有结构简单、执行工作精度高的优点,所以被广泛地应用到工业、制造业中。但其存在相应的不足,此类机械臂自身质量过大,能耗较高,难以在较小的工作空间中应用。柔性机器人具有较高的负荷质量比,可应用到较为复杂的环境中。因此,多自由度柔性机械臂可从事搬运、装配等工作。柔性机械臂虽然具有较多优点,但其控制过程中极易出现控制精度较差的问题,需要设定较为科学的控制方法[3]。
在过往的研究中,大量的专家学者提出了一系列多自由度柔性机械臂控制方法。此部分方法具有较高的应用价值,但当机械臂工作过程中存在非线性干扰时,机械臂运动过程存在运动位置异常的问题[4-5]。针对此问题,在此研究中提出多自由度柔性机械臂非线性连续时变反馈控制方法,希望通过此方法为机械臂的控制以及机械臂控制技术发展提供依据。
1"构建多自由度柔性机械臂动力学模型
此次研究将拉格朗日算子[6-7]作为计算基础,以能量的方式构建多自由度柔性机械臂动力学模型,以此避免计算中存在较为复杂的约束力,直接搭建主动力与运动之间的关系模型。
在以往的研究中,机械臂的动能A与此运动臂的位能之差得到的函数为此次研究中使用的拉格朗日函数L:
L(ai,ai0)=A-G(1)
根据此公式,得到拉格朗日方程:
Fi=tαLαai0-αLαai(2)
式中:ai表示机械臂的广义坐标;ai0表示机械臂的广义速度;Fi表示广义力矩;表示拉格朗日计算系数。应用此公式对机械臂的电机转子、连杆以及关节的动能与势能展开计算。通过文献研究发现,连杆速度不会对电机速度造成影响。因此,连杆的动能可表示为
D(ai,ai0)=ati0Gi(a)a~2(3)
式中:a表示连杆的位置矢量;Gi(a)表示连杆的惯性矩阵。电机转子的速度主要由连杆的牵连速度与相对速度组成,此时电机转子的动能可表示为
E(β,ai,ai0)=∑ni=1(H0i,r)Gi,rH0i,r2(4)
式中:β表示机械臂电机传动系数;n表示机械臂连杆的数量;H0i,r表示电机转子的速度;Gi,r表示连杆的惯性矩阵。对上述公式进行整理,将其转化为矢量计算公式,则有
E(β,ai,ai0)=βai0TGi(a)U(a)U(a)TCβai02(5)
式中:C表示经过减速比后的电机转子的转动惯性;U(a)表示耦合部分的惯性矩阵。此时多自由度柔性机械臂动能[8-9]可表示为
E(β,ai,ai0)=CE(β,ai,ai0)+E(ai,ai0)2(6)
则势能表达式可表示为
R(β,a)=(β-a)tx(β-a)+Vi(a)2(7)
将上述计算结果代入拉格朗日函数中,得到自由度柔性机械臂动力学方程[10]:
C(a)β′a′i0+(ai,ai0)β
ai0+g(a)-x(β-a)x(β-a)=ηextηm(8)
式中:C(a)表示完整机械臂动力学模型的惯性矩阵;g(a)表示重力矩阵。对上述公式进行整理,将其作为此次机械臂控制方法提出的基础。
2"机械臂非线性连续时变反馈控制方法设计
根据机械臂动力学模型,结合当前机械臂控制操作环节,在此研究中提出机械臂非线性连续时变反馈控制方法,具体控制过程如图1所示。
此次研究中,将机械臂的控制过程设定为3个部分,分别对应控制初期、控制中期以及控制后期,针对线性扰动以及机械臂的实时状态进行针对性优化,以此提升对机械臂的控制能力。
2.1"机械臂非线性连续时变反馈控制参数识别
在多自由度柔性机械臂的工作过程中,存在负载与非负载两种工况[11-12]。为保证机械臂的负载在任何工况下能够保持平衡,进一步提升机械臂工作的平稳性,需要对机械臂的重力矩展开计算[13]:
Sl1=s1g1W1cos(δ+δ1)+s2g2W2cos(δ+δ2)
Sl2=s1g1W1cos(δ+δ1)(9)
式中:SI1表示负载工况下机械臂的重力矩;SI2表示非负载工况下机械臂重力矩;s1表示连杆质量;s2表示机械臂的质量;g1表示连杆重力补偿参量;g2表示机械臂重力补偿参量;W1表示机械臂连杆质心到机械臂中心的距离;W2表示机械臂负载品质心到机械臂中心的距离;δ1表示连轴质心到负载品质心连接线与水平线的夹角;δ2表示负载品质心到机械臂中心连线与水平线之间的夹角。通过此公式可以发现,在负载与非负载两种环境下机械臂的重力矩差异较大[14]。基于机械臂平衡性考虑,机械臂的力矩应控制在式(9)中两计算式的重力矩之间。在确定重力矩之后,对机械臂的控制参数进行辨识:
min f(μ,ν,ρ)
s.t."μ∈μi=μi,μj
ν∈νi=νi,νj
ρ∈ρi=ρi,ρj(10)
式中:μ表示待检测动态参数;ν表示待检测重力矩参数;ρ表示待检测平衡系数。使用此公式,确定控制参数,为后续的研究提供基础。
2.2"机械臂非线性控制器构建
此次研究中,将现有的机械臂控制系统描述为下述形式:
s~=W′s+Hsat()+Jz
v=G′1s+B1z
o=G′2s+B2z(11)
控制外部系统可表示为
z~=Ez(12)
式中:s表示机械臂的实时运动状态;z表示外部控制系统的运行状态;v表示测量输出值;o表示原有控制系统的控制输出矩阵。sat表示控制器的饱和程度[15-16],通过公式可将其表示为
sat()=sign()min,max(13)
根据此公式,设计非线性连续时变反馈控制器。线性控制规律可表示为
f′=A′o+Jx′(14)
式中:x′表示参考输入向量;A′表示反馈增益矩阵。根据此公式,获取反馈增益矩阵
d′=A′+B′f′mn(15)
应用式(15)计算结果,得到非线性反馈控制规律,具体公式设定如下:
fn′=A′+B′f′mn(A′o+Jx′)δ(16)
式中δ表示机械臂控制过程中的阻尼系数。将此公式作为此次研究中的控制规则,根据此规则设计机械臂连续时变反馈控制器。假设控制规律能够使机械臂控制器q根据预设的控制目标得到期望轨迹qi,在此条件的控制误差可表示为
c(t)=r(t)-f′n(t)(17)
式中r(t)表示预设控制输出向量。为实现连续时变反馈控制,在此控制器中增加正光滑递减函数,以此对机械臂进行稳态与瞬态控制,则有
μ(t)=(μ0-μ∞)p-nt
-γμ(t)<p(t)<γ~μ(t)(18)
式中:-γ表示机械臂异常控制值;γ~表示机械臂正常控制值。使用此公式达到机械臂反馈控制的目标。在此研究中,将机械臂非线性连续时变反馈控制参数识别结果带入此控制器中,完成机械臂的连续时变反馈控制。对上文中设定的内容进行整理分析,采用将其有序连接为方法的形式。至此,多自由度柔性机械臂非线性连续时变反馈控制方法设计完成。
3"实验论证分析
3.1"实验平台搭建
为了更好地对多自由度柔性机械臂控制技术进行研究,在此次实验过程中搭建多自由度柔性机械臂实验平台。此平台主要对文中提出的控制方法进行实验,测试文中方法的实际控制效果。此次实验中选择的机械臂自由度个数设定为6,且关节可转动,由电机操纵其转动。具体的多自由度柔性机械臂选型结果如图2所示。
此机械臂具体操作参数设定如下:
1)自由度数:6;
2)伸展长度:0.5m;
3)重复定位精度:±15mm;
4)设备质量:30kg;
5)负载:2 kg。
除去上述机械臂设备外,在现有的实验平台基础上,搭建适合此次实验的新型实验平台。对原有的实验平台数据库与数据采集设备进行完善与优化,提升此实验平台的数据采集、存储与分析能力,为后续的实验对比提供数据基础。此实验平台中应用了多个数据服务网以及位移感应器,以便于获取机械臂在控制过程中产生的数据。将上述平台构建完成后,应用其作为此次实验的基础。
3.2"实验参数设定
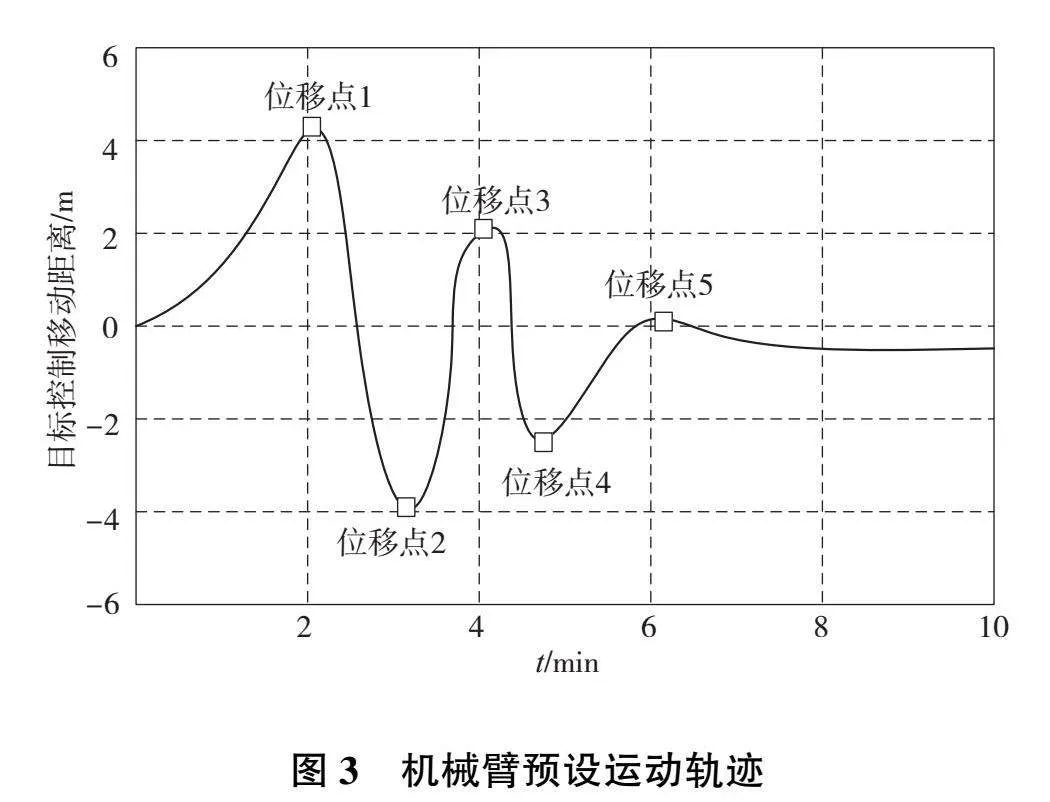
在此次实验过程中,将机械臂的初始状态设定为(η,η~)=(0,0);机械臂的目标控制坐标为(η1,η1~)=(0.70,0);机械臂目标角度设定为60°。在此次研究中,将实验对比指标设定为3部分,分别为机械臂运动曲线与期望轨迹差异、机械臂运动位移控制时延以及控制输出量与预设量差异度。为了更好地完成实验,获取真实实验结果。在此研究中,选择基础控制方法以及输出约束控制方法与文中控制方法进行对比,对比不同控制方法的应用效果。此次实验中预设的机械臂运行轨迹如图3所示。
在此次实验中,将图3中内容作为机械臂控制目标,其速率和幅度均有不同程度的非线性变化以测试设计方法在非线性连续动作中实际运动曲线与期望轨迹的差异,验证其精准性。根据此目标,对实验对象进行控制,获取实验结果。
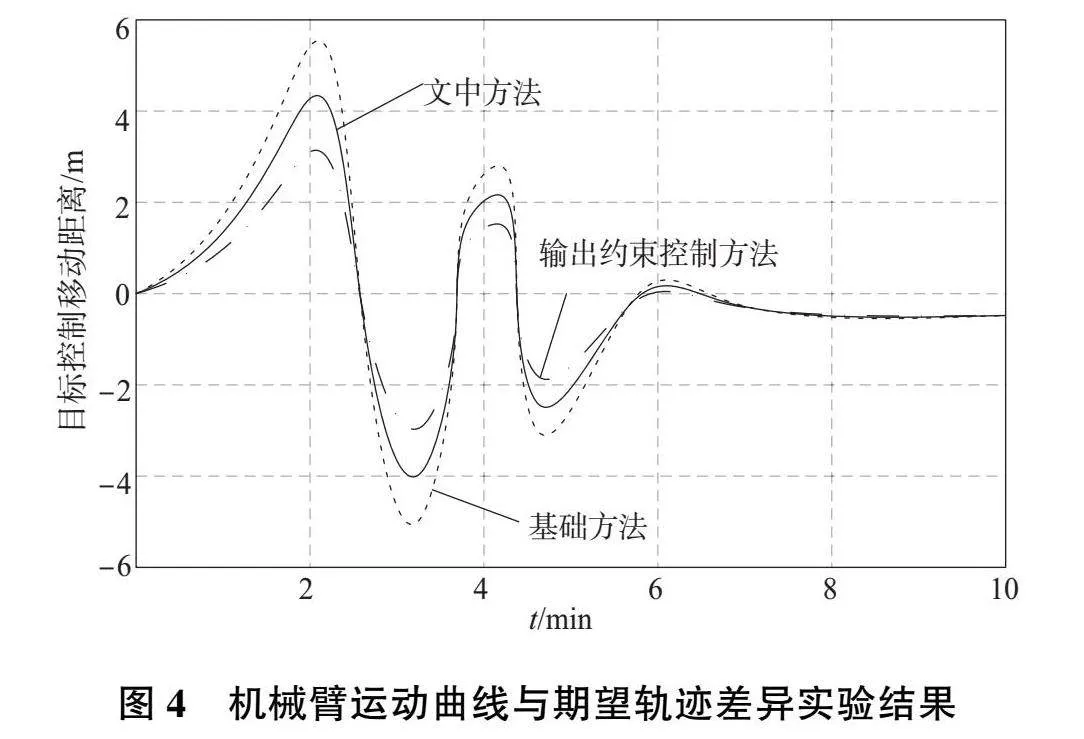
3.3"机械臂运动曲线与期望轨迹差异实验
按照上文设定的实验方案,对比机械臂运动曲线与期望轨迹的差异,具体实验结果如图4所示。
对上述实验结果进行分析可以看出,不论是文中方法还是其他两种方法在对机械臂进行控制时都存在一定的差异。但对3种方法进行对比可以看出,文中方法应用后的运动轨迹与期望轨迹的走向较为一致。其他两种方法应用后所得运动轨迹与期望轨迹整体走向相差较大。整理上述实验结果可以发现,文中方法应用后可对机械臂进行较高的定位,提升机械臂的定位精度,保证机械臂运动轨迹与期望轨迹一致。这是因为文中方法考虑了机械臂的负载状态,计算机械臂的重力矩,能够对机械臂非线性连续时变反馈控制参数进行识别,提高了控制精度。
3.4"机械臂运动位移控制时延实验
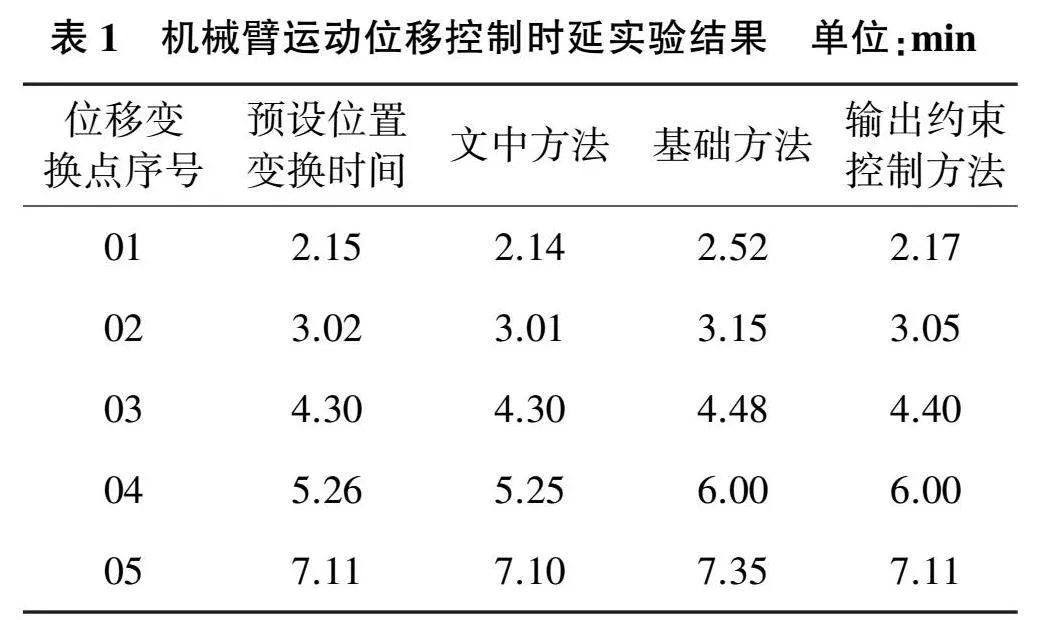
如图4所示,在此次实验中机械臂共计5个位移点。将此部分位移点进行排序,分别为01—05,获取每个位移点的位置变换时间,将其作为此次实验中的对照组。使用文中方法与其他两种方法对机械臂进行控制并获取位置变换时间点,将其作为此次实验结果,以此确定不同控制方法的控制时延。具体实验结果如表1所示。
对表1中的实验结果进行分析可以看出,文中方法在应用后可在最短的时间内使机械臂达到目标位置,进一步缩短控制时间。与文中方法相比,其他两种方法的控制过程较差,控制时延相对较大,整体应用效果不佳。在日后的研究中还需对此两部分方法进行完善与优化。这是因为文中方法设定了非线性连续时变反馈控制规则,进一步构建机械臂非线性控制器,提高了机械臂定位控制的性能。
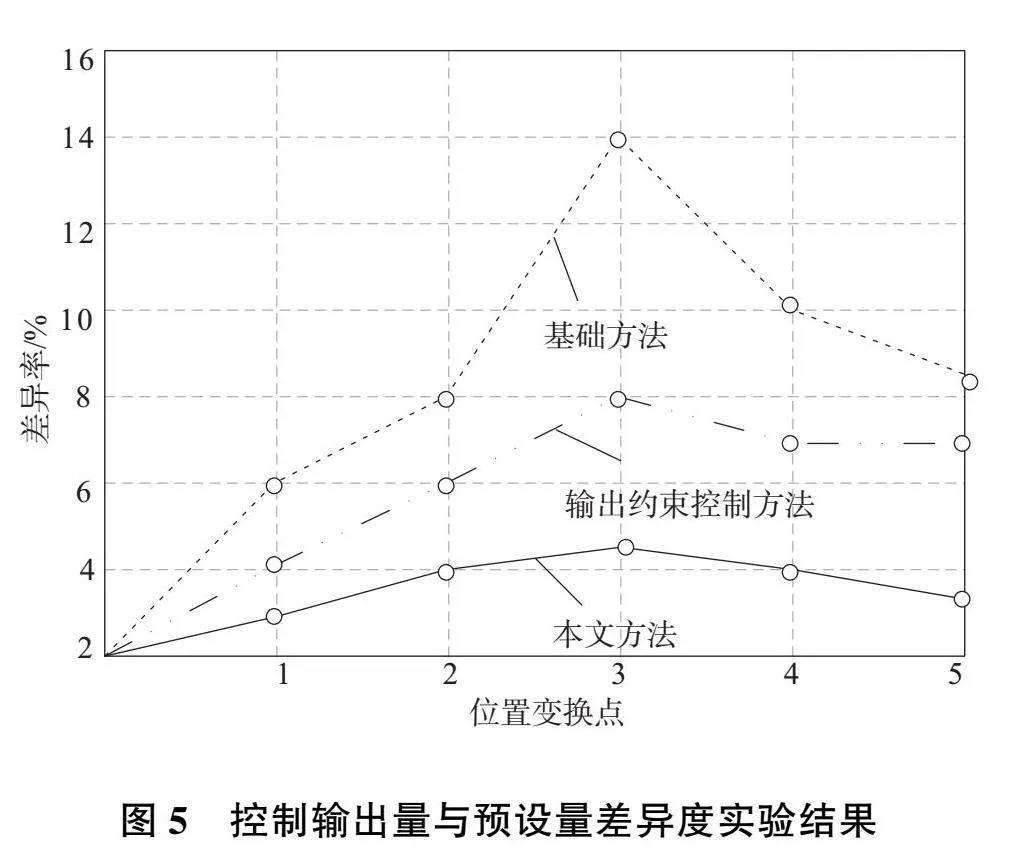
3.5"控制输出量与预设量差异度实验
控制输出量与预设量差异度实验结果如图5所示。
图5"控制输出量与预设量差异度实验结果
对图5中的实验结果进行分析可以看出,3种方法的控制输出值与预设输出值存在一定的差异,但文中方法的差异度相对较低,文中方法输出的控制值与预设值较为一致。与文中方法相比,其他两种方法的控制输出值与预设值差异较大,此两种方法的控制能力与控制水平相对较低。整理上述实验结果可以确定,文中方法的控制能力相对较高。这是因为本文方法将拉格朗日算子作为计算基础,以能量的方式构建多自由度柔性机械臂动力学模型,可进一步提升机械臂的运行效果。
4"结语
此次研究中提出了一种针对定位精度与时延的新型机械臂控制方法,通过实验证实了此方法的应用性能。由于此方法对控制规则与控制器进行了大量的优化,提出了一系列的计算要求,在日后的研究中还需对其计算环节进行整理,以此保证此方法可长期应用到机械臂的控制过程中。
参考文献:
[1] 程杨,潘尚峰. 一种多自由度康复外骨骼机械臂的虚拟分解控制[J]. 机械工程学报,2022,58(9):21-30.
[2] 潘昌忠,费湘尹,周兰,等. 柔性关节机械臂的自适应命令滤波输出反馈控制[J]. 西安交通大学学报,2022,56(5):199-208.
[3] 琚世杰,程良彦,闫安志. 压电柔性机械臂振动模拟与BP-PID控制[J]. 河南理工大学学报(自然科学版),2022,41(1):107-113.
[4] 孙训红,陈维乐,都海波,等. 基于输出反馈和滑模控制的一类二阶非线性系统有限时间镇定方法[J]. 控制理论与应用,2021,38(11):1727-1734.
[5] 马天兵,宫晗,杜菲,等. 基于线结构光和优化PID的压电柔性机械臂振动控制[J]. 光学精密工程,2021,29(11):2661-2671.
[6] 曹怀磊,邓文翔,姚建勇. 变负载柔性机械臂复合学习控制[J]. 西安交通大学学报,2022,56(1):61-69.
[7] 郝淑英,宋宇昊,李伟雄,等. 速度反馈对多自由度微陀螺非线性影响的控制[J]. 振动工程学报,2021,34(2):227-234.
[8] 周晟,李解,高琳,等. 柔性机械臂非线性干扰观测器的高阶滑模控制[J]. 组合机床与自动化加工技术,2021(2):82-85.
[9] 王茜,侯保林. 弹药协调器非线性连续时变反馈控制[J]. 哈尔滨工业大学学报,2021,53(2):191-200.
[10] 王茜,侯保林,姚来鹏,等. 基于干扰观测器的弹药传输机械臂非线性连续时变反馈控制[J]. 兵工学报,2020,41(11):2179-2188.
[11] 余峰,陈新元. N自由度柔性机械臂通用的动力学建模方法研究[J]. 振动与冲击,2020,39(16):103-111.
[12] 曾伟鹏,邵辉,洪雪梅,等. 采用非线性干扰观测器的机械臂补偿型滑模控制[J]. 华侨大学学报(自然科学版),2020,41(4):415-422.
[13] 李刚,于金鹏,刘加朋,等. 基于指令滤波的机械臂有限时间输出约束阻抗控制[J]. 机械制造与自动化,2021,50(4):150-155.
[14] 张昌,武玉强. 基于P-Rob六自由度机械臂运动学建模与仿真[J]. 包装工程,2020,41(11):166-173.
[15] 韩江,张凯,董方方. 基于Udwadia-Kalaba方法的柔性机械臂鲁棒伺服约束控制[J]. 合肥工业大学学报(自然科学版),2020,43(5):577-583.
[16] 高国华,郑玉航,王皓. 双臂三自由度柔性连续体机器人的运动分析及实验研究[J]. 北京工业大学学报,2020,46(5):448-455.
收稿日期:20221018
猜你喜欢
教育教学论坛(2017年14期)2017-04-20 18:01:32
中国科技博览(2017年2期)2017-03-30 08:25:27
电脑知识与技术(2016年25期)2016-11-16 14:27:21
科技与创新(2016年9期)2016-05-28 19:23:15
山东工业技术(2016年9期)2016-05-06 17:11:07
计算技术与自动化(2015年3期)2015-12-31 17:09:55
计算技术与自动化(2015年3期)2015-12-31 16:57:45
软件导刊(2015年8期)2015-09-18 12:48:03
软件导刊(2015年7期)2015-08-06 13:04:23
现代电子技术(2014年23期)2014-12-13 11:00:37
