
无人机短距着陆控制技术研究
2024-08-28 00:00:00吕健玮黄一敏魏硕
机械制造与自动化 2024年2期







摘"要:研究固定翼无人机短距着陆性能具有十分重要的现实意义。基于对象无人机三种襟翼构型中的着陆襟翼构型,分析以固定油门为基础的传统着陆控制方式存在的缺陷性问题,从动力学角度分析近地段在低速、大姿态状态下各项着陆指标间的相互制约关系,并得出“空速为影响着陆性能的主导诱因”这一重要结论,从动力学角度提出油门速度闭环控制方案。在控制律设计过程中,创新性地采用线性化理论分析和半物理非线性仿真相结合的手段,充分结合工程实践经验,突出了油门速度控制的特殊性与有效性,使着陆性能得到前所未有的提升。
关键词:固定翼无人机;短距着陆;着陆敏感性;推力非线性;速度控制
中图分类号:V249""文献标志码:B""文章编号:1671-5276(2024)02-0258-08
Reserch on Control Strategy for Short Landing of UAV
LYU Jianwei,HUANG Yimin,WEI Shuo
(College of Automation Engineering,Nanjing University of Aeronautics and Astronautics,Nanjing 211106,China)
Abstract:Reserch on short-range landing performance of fixed wing UAV has great practical significance. Based on the landing flap configuration among the three flap configurations of the target UAV, this paper analyzes the defects of the traditional landing control mode based on fixed throttle, and elaborates the mutual restriction relationship between various landing indicators in the near field at low speed and large attitude from the perspective of dynamics, The important conclusion that \"airspeed is the leading inducement affecting landing performance\" is drawn, and the closed-loop control scheme of throttle speed is proposed from the perspective of dynamics. In the process of control law design, the combination of linear theoretical analysis and semi physical nonlinear simulation is innovatively adopted, with full ingretation of engineering practical experience, which highlights the particularity and effectiveness of throttle speed control, and improves the landing performance unprecedentedly.
Keywords:fixed wing UAV;shorting landing;landing sensitivity;thrust nonlinearity;speed control
0"引言
对象无人机以阿若拉有人机改无人机的形式,其具有固定翼常规气动构型布局,属于一种典型的轻型运动类特技飞机。原机属性决定了该飞机具备高升阻比和高气动效率的特点,在保障着陆基本安全的同时,力求提升着陆的短距性能,这给着陆控制律设计带来了很大挑战[1]。
在对象无人机传统着陆浅下滑段的控制中,采用固定油门和俯仰角闭环拉起的控制策略,已安全完成数次飞行任务。原控制策略在试飞中,由于ROTAX-914发动机小油门段存在推力线性度差、控制灵敏度高等一系列问题,在浅下滑段经常因推力设计估算值偏小而出现拉飘现象,必须通过人为反复遥调油门操作才能安全着陆。固定油门的着陆方式严重破坏了着陆的自主性,既大大影响了着陆的短距性与精确性,还严重影响着陆性能的一致性。因此,将油门参与到浅下滑控制方案的想法呼之欲出。
本文首先深入分析了原固定油门控制方案的不足,其次从飞行动力学角度建立了空速、下沉率与俯仰角之间在低速状态下的制约关系,找到了空速这一主要矛盾,最终提出并设计了油门到空速的闭环控制方案。作为对象无人机在浅下滑段首次使用速度闭环,该方案在半物理平台验证下体现出了较强的鲁棒性,大大提高了着陆的短距性与一致性。
1""着陆动态过程描述
1.1""着陆阶段划分
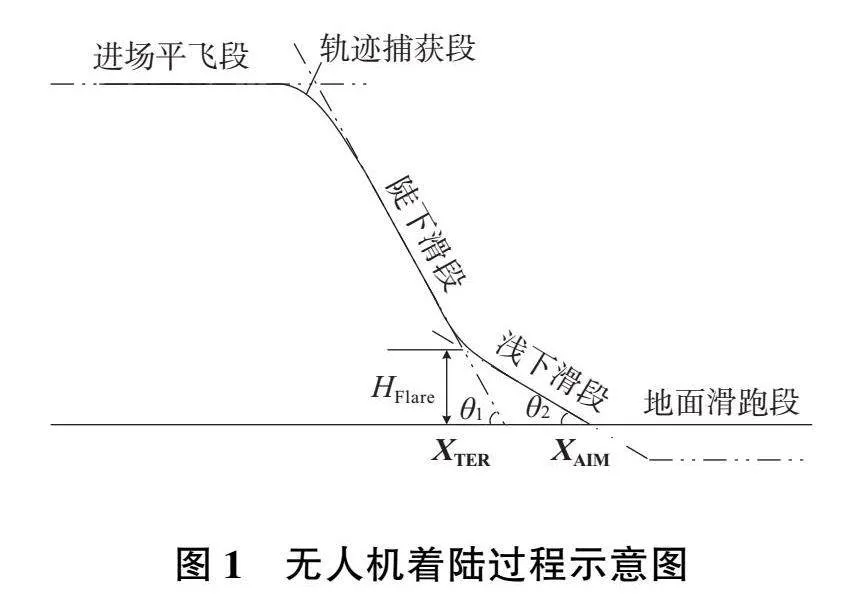
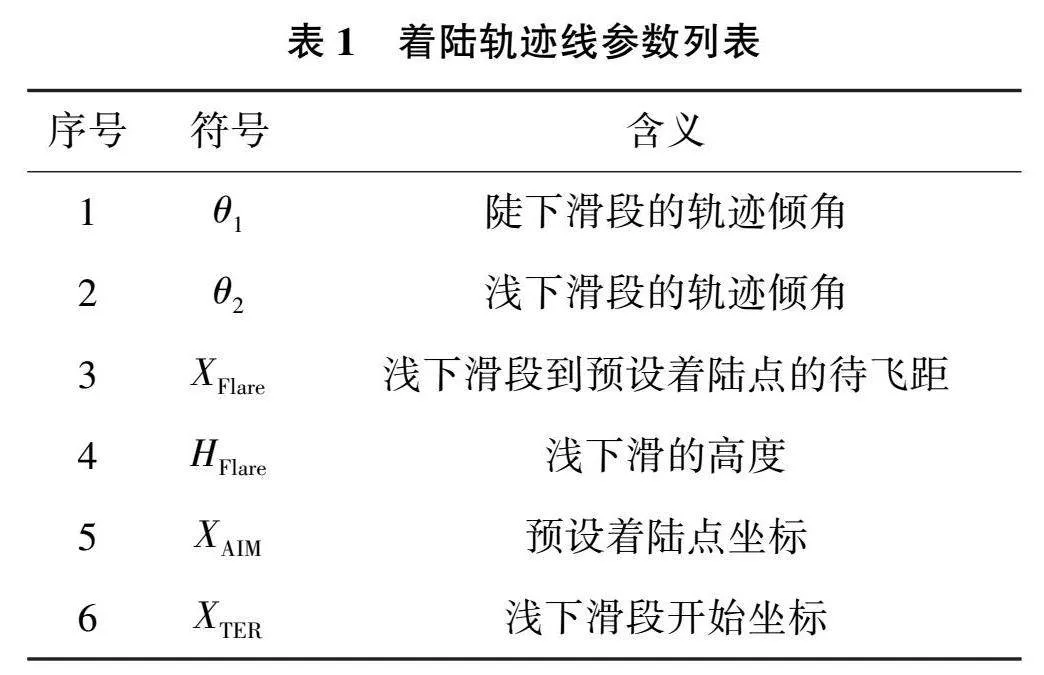
实验室历年在固定翼项目的研究中已经形成了一套成熟的固定翼无人机进场着陆流程。一般将无人机着陆流程分为:进场平飞段、轨迹捕获段、陡下滑段、浅下滑段和地面滑跑段[2~4]。着陆各阶段的剖面解析图如图1所示。着陆轨迹线参数如表1所示。
无人机着陆阶段复杂,每个阶段的任务各不相同。无人机着陆重点关注的是陡下滑段和浅下滑段,其中以浅下滑段的控制尤为重要,将直接影响触地指标,也是控制律不断改进的重点阶段[5]。
1.2""浅下滑段动态过程
当无人机陡下滑高度降低至预设浅下滑高度(HEXP)后,即标志着进入浅下滑阶段。对动态过程的物理性描述如下。
浅下滑阶段是一个姿态不断拉起、速度不断减小、高度匀速降低的动态非制导控制过程。从运动学角度可分为“过渡减速”和“稳态维持”两大阶段。“过渡减速”是指姿态由陡下滑时的稳态拉起至触地预设姿态(5°)的整个动态过程;“稳态维持”是指高度下降到近地阶段(5m~8m)后,一切触地指标(姿态、空速和下沉率)维持稳定直至触地的过程。
其中,“过渡减速”段由于各物理量间存在很强的制约耦合关系,历来作为研究课题的难点,也是所有控制律作用的重点阶段。
1.3"传统着陆纵向控制策略
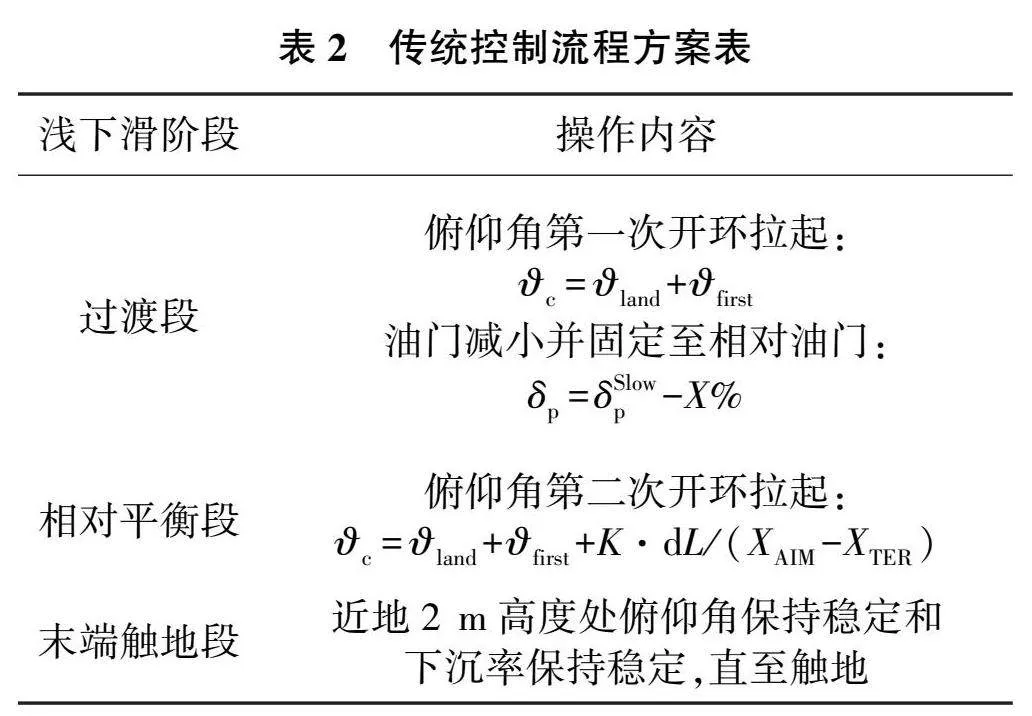
传统浅下滑段控制流程为:油门采用固定油门方式,俯仰角进行第一次开环拉起,以建立-1m/s附近的初始下沉率。随后,俯仰角指令继续以开环形式给定,给定方式为待飞距的函数,减速的同时姿态角逐渐拉起,直至触地。传统控制律的常规操作流程如表2所示。
2"问题描述与机理分析
2.1"油门不确定性问题
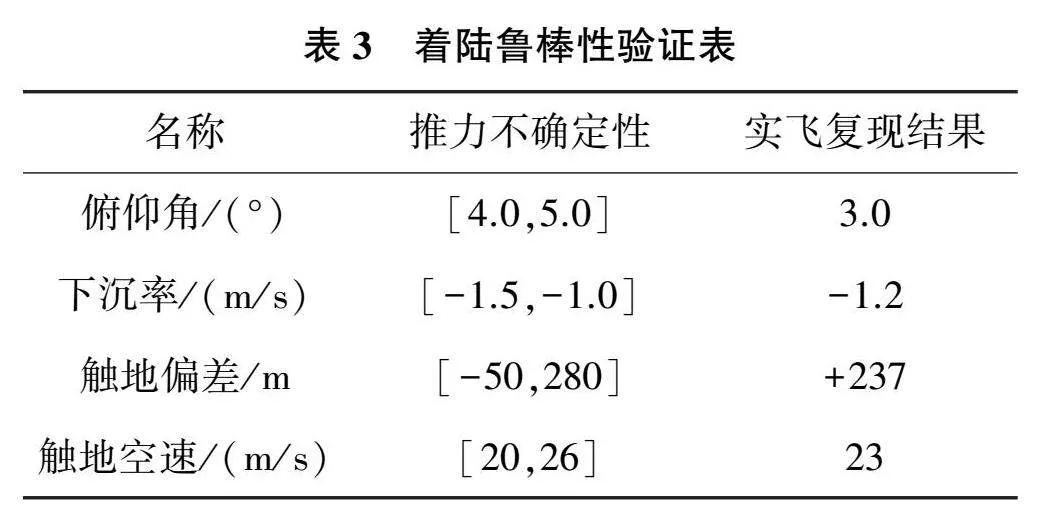
对象无人机分别在传统控制策略上以15°襟翼完成了首飞,以30°襟翼完成了第二次飞行。在两次飞行过程中,存在着一个对着陆影响最大的问题是,浅下滑段需频繁人为遥调油门操纵,才能使无人机能够正常着陆,严重影响了着陆过程的自动化程度。结合两次实飞数据,模拟现场飞手操纵的着陆性能如表3所示。
在短暂的浅下滑段,两次飞行都出现了相同情况:拉飘平飞和频繁地减小油门遥调操纵。这说明在仿真设计过程中,对相同油门开度下的推力估算普遍偏小(实际推力比仿真大),故每次都不得不通过减油门操纵才能使无人机安全着陆。
2.2"敏感性分析
由浅下滑相对平衡段的配平机理可知,油门作为纵向受力分量的核心支柱,推力的不确定性是影响着陆“三要素”(姿态、下沉率和落点)的罪魁祸首。浅下滑段固定油门,不论是绝对油门还是相对油门,对应推力的一致性差,导致推力难以把握。该控制方式也和有人机着陆的操作方式相违背。推力在小油门段的不确定性,是和对象无人机发动机本体特性息息相关的。
对象无人机采用ROTAX-914发动机,其本体特性是造成小油门段推力曲线非线性差的根源之所在:1)活塞式化油器发动机小油门段功率输出非线性度差;2)双涡轮增压机构对环境灵敏度要求高(温度、气压和湿度等);3)飞行前人为调教怠速阀对基准功率输出的影响。
其次,着陆“三要素”对推力不确定性的敏感性程度高。形成了“推力非线性度差→空速敏感→影响着陆三要素”这一影响关系链条。其中,油门推力的非线性是主要矛盾,也是首要问题。
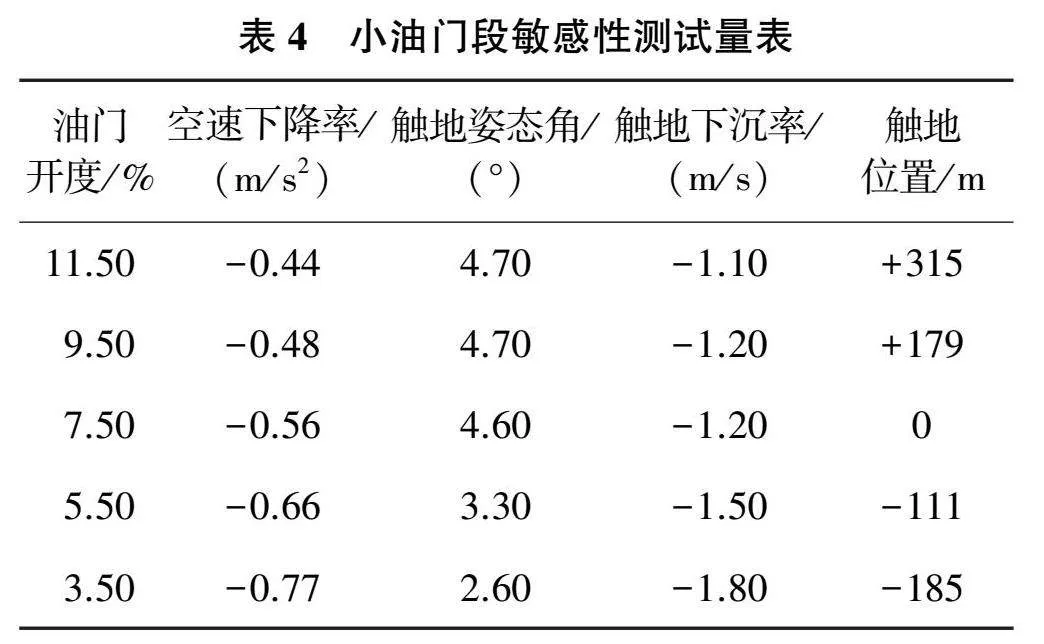
为了凸显该敏感性,特以基态固定油门为基础,进行以2%为跨度的油门上下遥调测试,以反映小油门段中油门开度的轻微变化对着陆品质所造成的巨大影响。以基态为中间值,2%为步长,上下依次遥调油门。为了对比方便,空速下降率按时间计算;触地位置在基准状态前为正,在基准状态后为负。综上计算得到着陆敏感性量表如表4所示。足以见得,在其他控制律都不变的情况下,浅下滑油门仅仅变化±2%,就足以造成超过100m的落地偏差,对空速造成2m/s~4m/s的偏差,空速进而影响以姿态为首的着陆“三要素”。
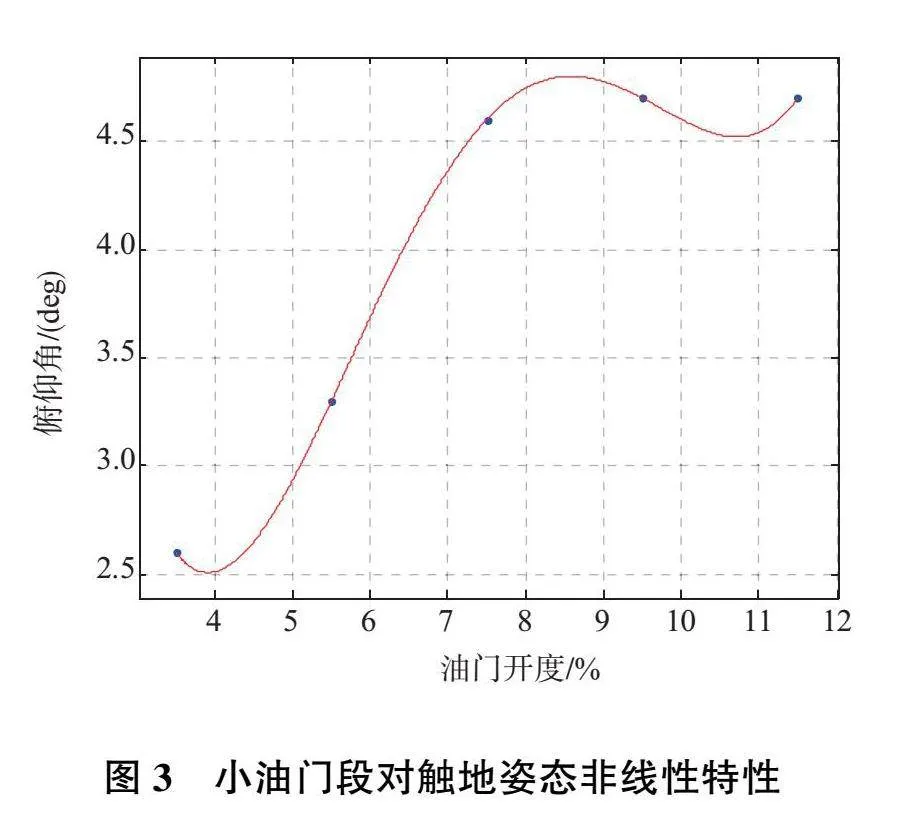
在相同油门跨度变化下,着陆参数的变化也表现出了较大的非线性。对推力变化最为敏感的是空速,而空速对触地姿态影响又最大(图2和图3)。这些现象的背后都共同指向一个问题,即小油门段的油门开度对应的推力线性度差,由此引发对着陆控制的敏感性问题。
空速作为影响着陆“三要素”的首要因素,对推力的变化最为敏感[6]。油门推力成为了影响着陆的主要矛盾,抓住推力对空速的控制,就相当于抓住了着陆的“主控权”和着陆“三要素”的命脉,通过对空速的控制,摆脱推力的敏感区间,进而提升着陆品质。
以有人机在近地段的驾驶操作为启发,浅下滑段引入油门参控的方案成为当前的迫切需要。油门参控可以使浅下滑段的推力“化被动为主动”,摆脱发动机本体在小油门段线性度差的影响,弱化浅下滑段对“固定油门开度而间接固定推力”的依赖,纵向上升降舵和油门的操作输入至此才算完备。充分发挥纵向控制的能动性,同时对风干扰等不确定性因素也能起到一定程度的改善。
3"油门速度控制策略
3.1"浅下滑速度控制特性分析
1)速度控制的差异性
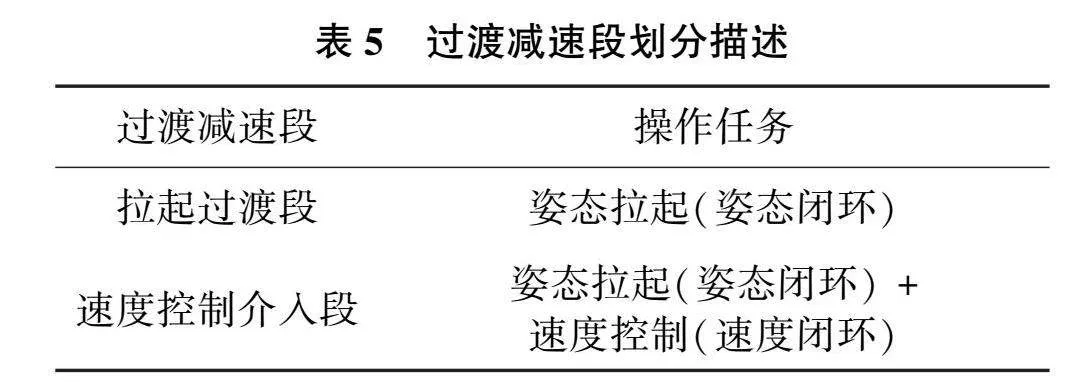
在固定翼无人机中,油门速度控制随处可见。由传统着陆控制可知,浅下滑段从25m高度开始,具有高度低、时间短的典型特征。其间,空速变化跨度大(35m/s~22m/s),相对平衡段维持时间短,而闭环控制就作用于相对平衡段中。若以速度控制介入时机为分界,又可将“过渡减速段”划分为“拉起过渡段”和“速度控制介入段”,其各自特性如表5所示。本文的研究重点在“速度控制介入段”。
浅下滑段速度控制与巡航段有很大不同:就飞行状态而言,巡航阶段姿态在0°附近,而在浅下滑段中,姿态也在动态变化;从控制指令而言,巡航阶段的速度指令为“定常指令”,而浅下滑段为“线性指令+定常指令”,控制任务各不相同。巡航段的速度控制律如式(1)所示。
δp=δtrimp+KVp(V-Vg)+KIVp∫(V-Vg)
(1)
式中:|KVp|=1.5;|KIVp|=0.2。
综上所述,和巡航阶段相比,浅下滑速度控制存在如下3点显著差别。
a)低空速区间对稳态控制的精确性要求(由空速对姿态的制约关系决定):根据浅下滑配平关系表可知,空速与姿态存在明显的制约关系,并且随着空速的降低,这种制约关系越强。该特性是由对象无人机高灵敏气动特性决定的;而空中巡航段不需要考虑空速与姿态之间的关系。
b)低高度阈值对动态控制的快速性要求(由高度和姿态安全裕度决定):姿态按高度拉起,浅下滑高度一般小于25m,要求速度控制在短时间内完成跟踪过渡并达到稳态;而空中巡航段有充足的航段飞行时间进行调速[7]。
c)小油门段油门开度与推力输出非线性过强(由发动机本体特性决定):对象无人机油门在10%以下即进入小油门段范畴,油门开度与推力呈现出很强非线性关系,将会导致设计的油门值不能与推力形成良好对应,增大控制难度。
2)空速的制约关系
空速与姿态存在明显制约关系和敏感特性,要想深入研究两者关系,认识“空速”对于着陆的主导地位,了解相对平衡段配平点的特殊性是十分必要的。
相对平衡段的任意一点皆可配平,这些可配平点称之为“准平衡状态”,是以姿态变化为主,寻找油门建立起来的纵向分力平衡的动态过程,表现为下沉率的稳定,其示意图如图4所示。而平飞的配平点是严格的平衡态,其各项物理量和运动表现均保持不变。两者在配平机理上相同,只是在配平点上的物理意义存在差异。其中,以油门建立的纵向分力占据很大一部分,而此时空速较低(普遍在28m/s以下),姿态拉起带来的气动力在纵向分量上贡献较小,并且迎角很快会跨过最大升阻区(2° ~-3°)。
综上所述,油门参控将会使“支柱”发生根本性变化,在关系上使得这种制约由纵向发展转变为横向发展,给整个相对平衡段赋予“智能”,增强浅下滑段的灵活性,削弱甚至摆脱实际油门不准带来的着陆适应性问题。
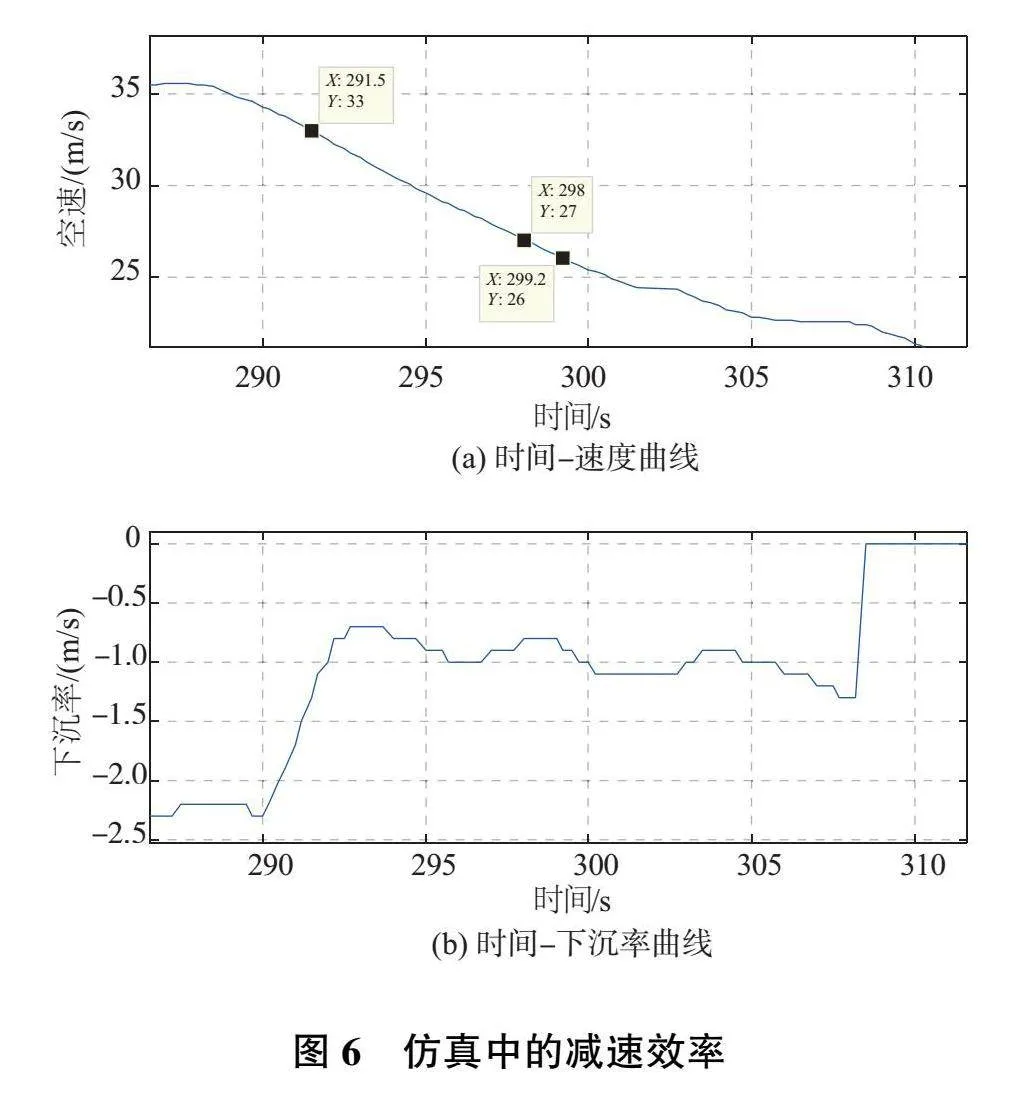
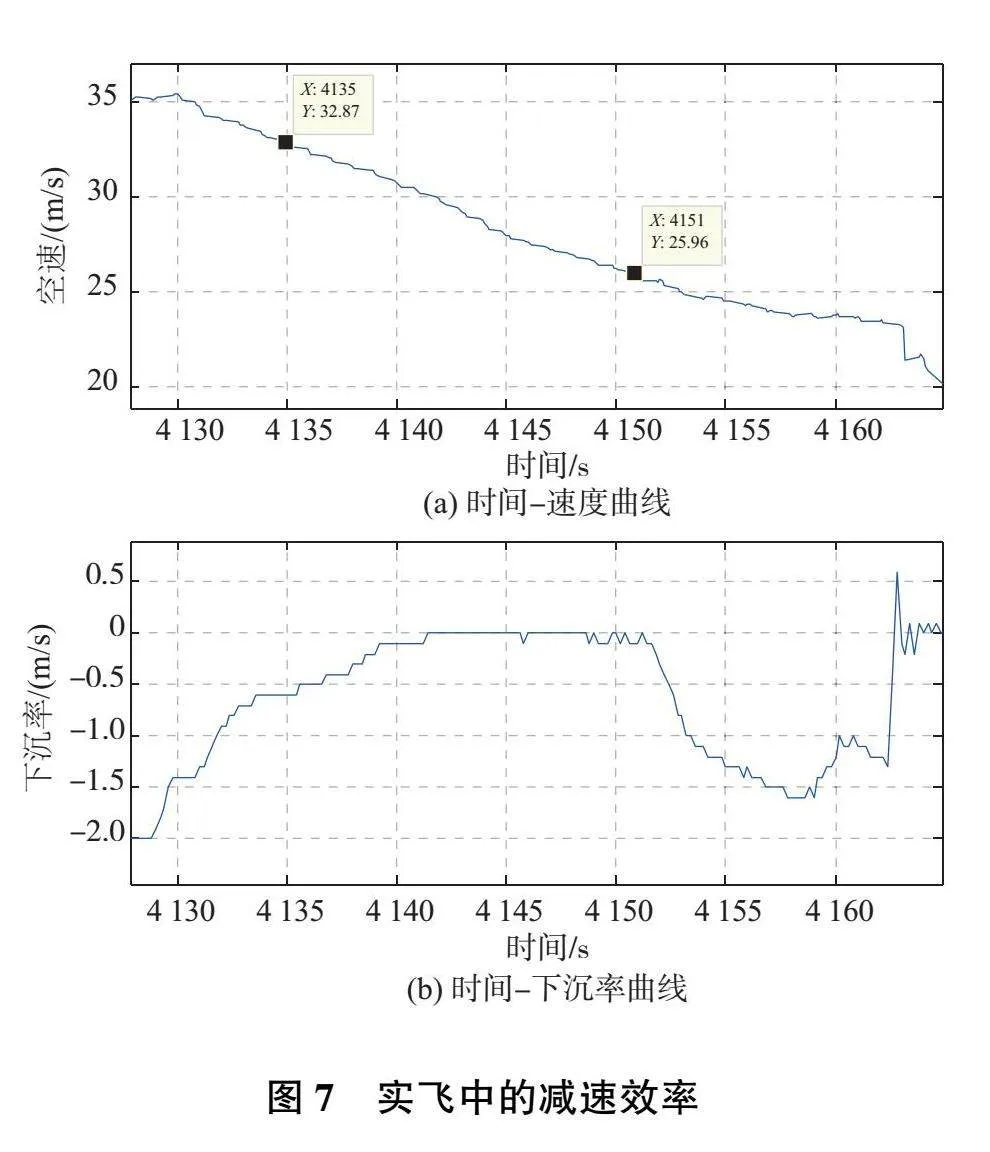
3)减速效能分析
30°襟翼作为着陆构型,其浅下滑阶段的减速效率至关重要。在拉起过程中,俯仰角不论按待飞距拉起还是按高度拉起,都可近似为匀速拉起,拉起动作在操作上是独立的。由空速与姿态的函数关系曲线(图5)可知,在保证下沉率-1m/s前提下,空速是制约姿态的重要变量。
图6是仿真数据,最小油门开度在3%下的减速效率(-0.92m/s2);图7是实飞数据,固定油门开度10%并反复遥调的平均减速效率(-0.44m/s2)。对比发现,最小油门开度的下沉率非常稳定;而实飞中固定10%油门的减速效率明显偏小,必须通过人工反复遥调才能正常着陆,下沉率从平飘到减小再到增大。由此说明,减速过程中所固定的油门只要大于最小油门,对30°襟翼而言,减速效率均会普遍偏小,减速效能较差。
足以见得,油门处于3%的最小开度才能与姿态拉起速率相匹配。单从这一点也证明了30°襟翼具有高升阻和减速难的问题,而这些都是小襟翼存在的共性问题[8]。
3.2"速度控制律设计
1)速度控制设计基值选取
为了高效设计浅下滑速度控制律,选取某一空速作为稳态进行设计至关重要。模拟巡航平飞阶段的设计过程,考虑不同姿态下的平飞速度,使其迎角在最大升阻比迎角(2°~3°)附近。此意义在于,模拟浅下滑段纵向存在俯仰角控制情形下的准平衡状态。
在平飞条件下,顺次按空速进行配平,得到表6平飞配平关系表,结合最大升阻条件,最终确定空速28m/s为该无人机的理论设计基值。
空速28m/s的设计基值,正好处于浅下滑速度控制区段中间,向上既能兼顾低速平飞的模态,向下又能作为浅下滑段油门速度的典型工作点。该点对应的平飞模态作为又一典型工作点,成为油门速度控制研究的不二之选。
2)控制方案设计
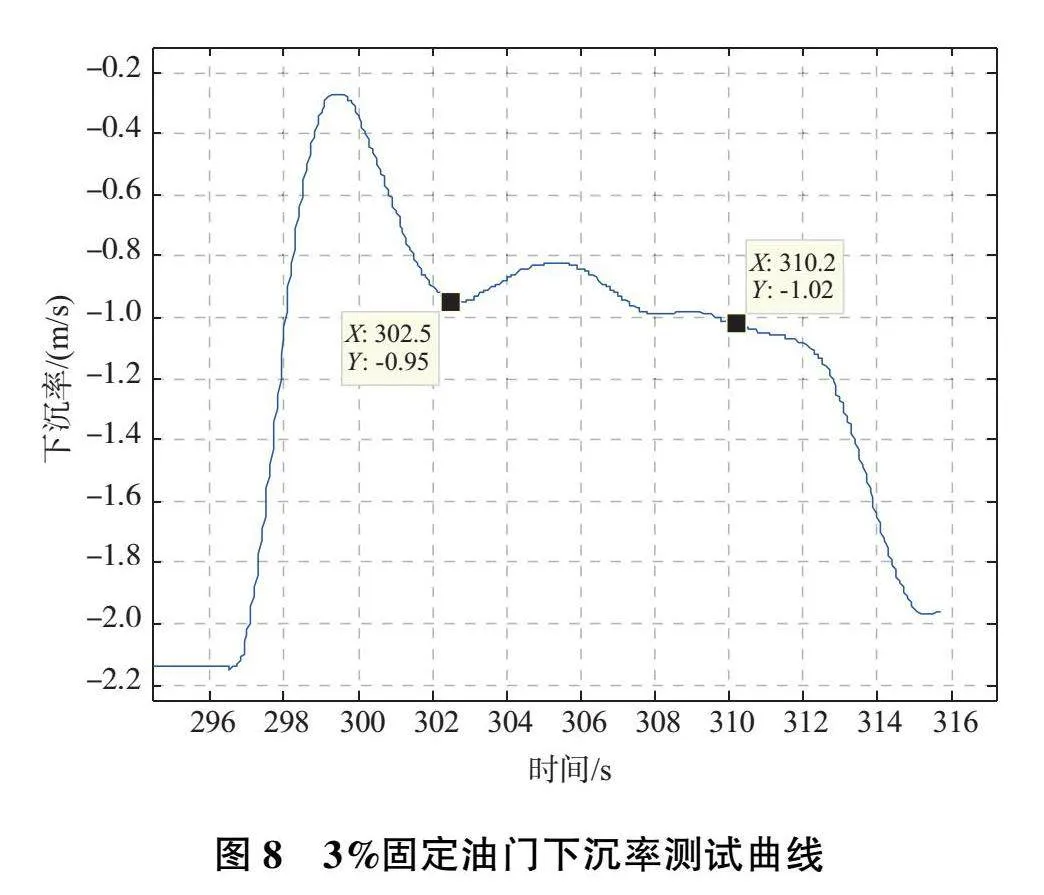
基于半物理非线性仿真平台,设计非线性仿真试验,在原着陆控制不变的情况下,仅将浅下滑油门固定在最小油门开度3%,测试下沉率的动态特性以便设计控制方案的介入时机。由该试验可知,下沉率能够保持在-1m/s的时长约占整个相对平衡段的40%(图8)。
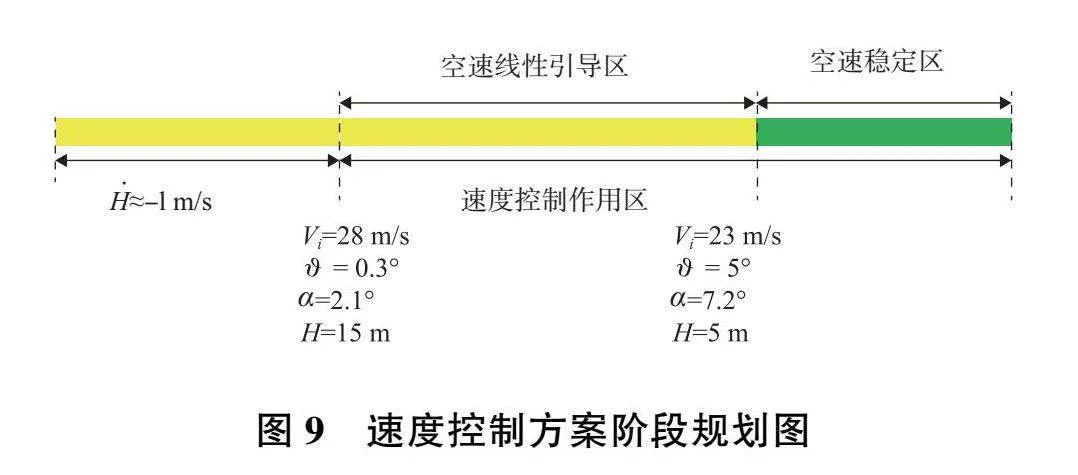
以此下沉率特性为指导,得到控制方案规划如图9所示:姿态在5°前为相对平衡段,之后为近地段。在相对平衡段40%处,迎角恰好跨过最大升阻区,即将进入阻力大于升力的阶段,若油门继续维持在最小开度,下沉率将会越来越大。由此可清晰确定出:油门速度控制的作用区即为相对平衡段剩下的60%,5m高度处空速及其他各量达到稳态,控制持续作用直至触地。图9中:H·为下沉率;Vi为指示空速;θ为俯仰角;α为迎角。
由固定最小油门的非线性试验结果实验充分证明,在俯仰角拉起速率基本不变的前提下,30°襟翼的升阻特性恰好与该减速效率相匹配,说明以合适的迎角速率和空速跨越了最大升阻区,才会出现纵向上的平衡;而在设计上,要求无人机在近地5m高度附近就应完成所有动态过程的变换,各参数都需达到着陆状态并保持,两阶段中间的断层(5m~10m)即为速度控制的“舞台”。
空速指令的设计在“油门速度控制作用区”显得至关重要。由图9可知,该作用区由“空速线性引导区”和“空速稳定区”两部分组成。其中,线性引导区的指令设计较为复杂,而稳定区的指令设计可以直接由浅下滑的相对平衡段配平空速值确定:固定下沉率-1m/s,俯仰角稳定在5°时刻的准平衡状态配平空速为22.5m/s。
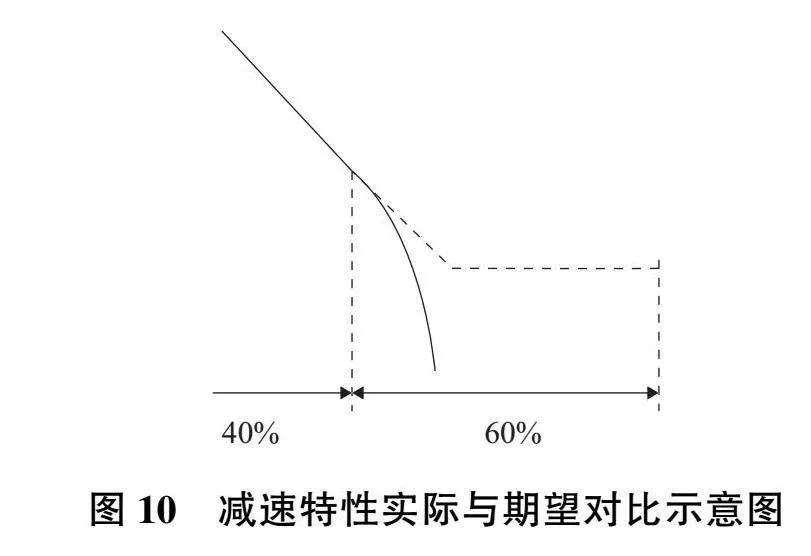
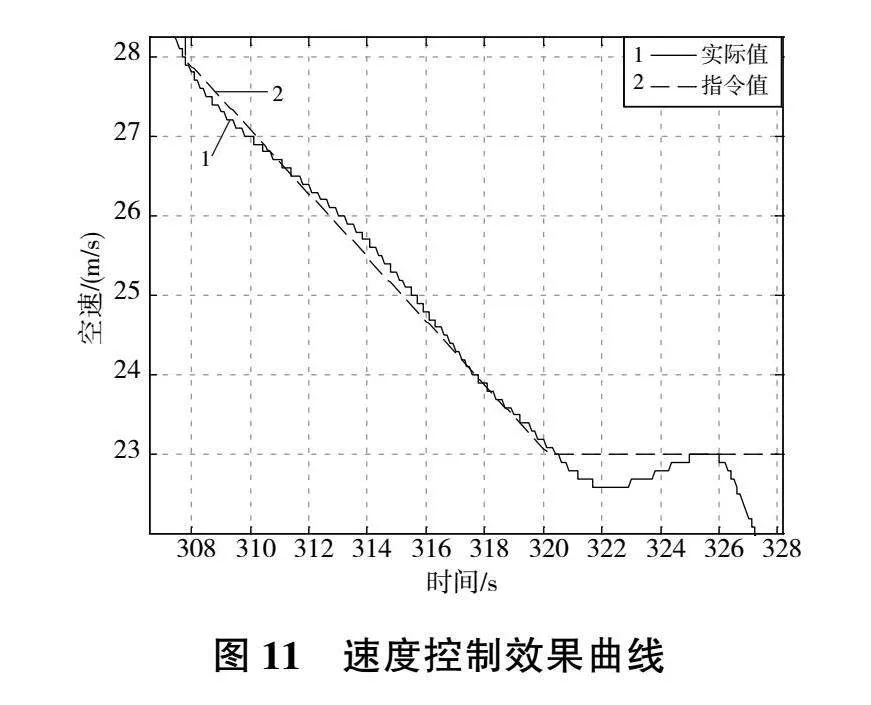
当迎角越过最大升阻比迎角后继续增大,增阻能力逐渐高于增升能力,空速加速下降,油门速度控制的任务逐渐清晰。速度控制前期,线性给定指令保持空速下降率不变完成过渡,而后将空速固定在22.5m/s进入近地段并保持稳定。由图10可知,在40%阶段中,空速下降率与姿态拉起速率相互匹配(斜直线),造成空速加速下降(分离曲线)的唯一原因是推力的纵向分量供给不足。经计算,相对平衡段前期的40%实际空速的减速效率为-0.4m/s2,故为了使这一减速效率继续与姿态拉起速率相适应,空速指令也应保持-0.4 m/s2的减速效率,由26m/s介入为始(下沉率达到稳态初期时所对应的空速),22.5m/s保持为止。至此,空速线性引导过渡段的指令函数就此确定,控制效果如图11所示。
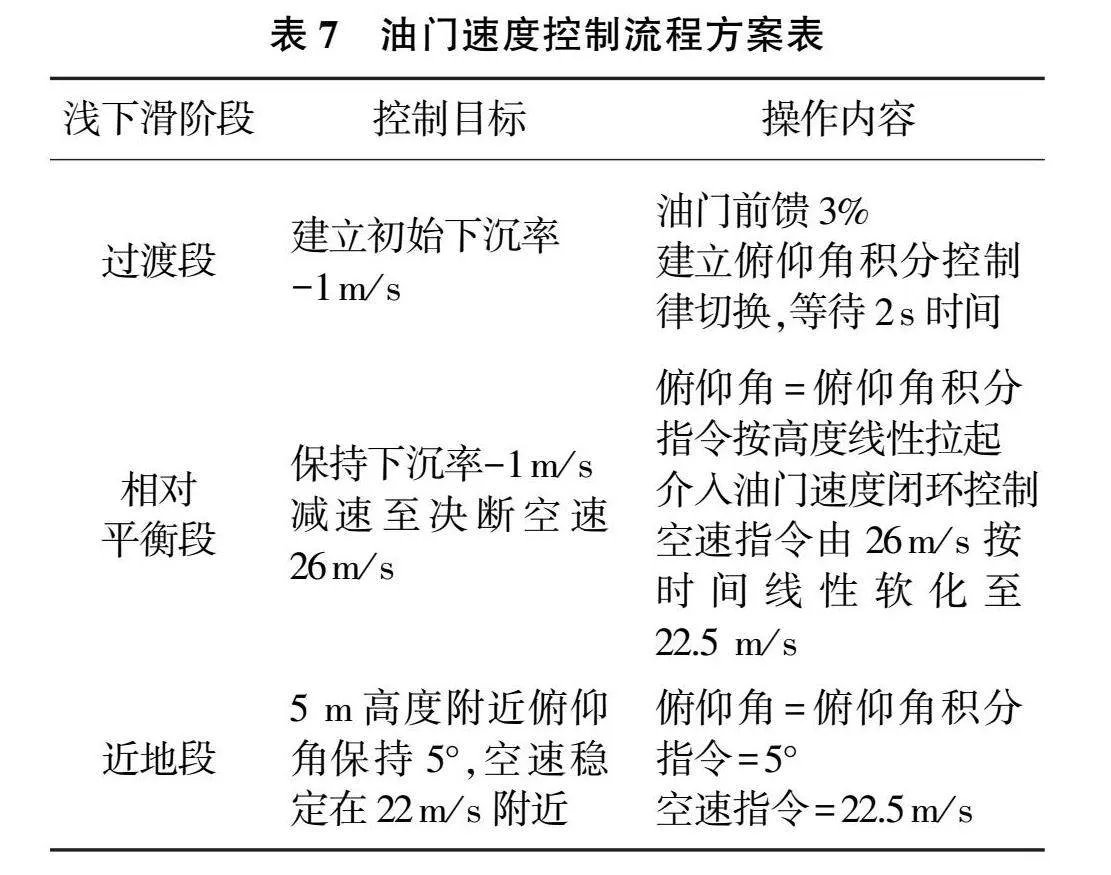
最终给出油门速度控制方案如表7所示。
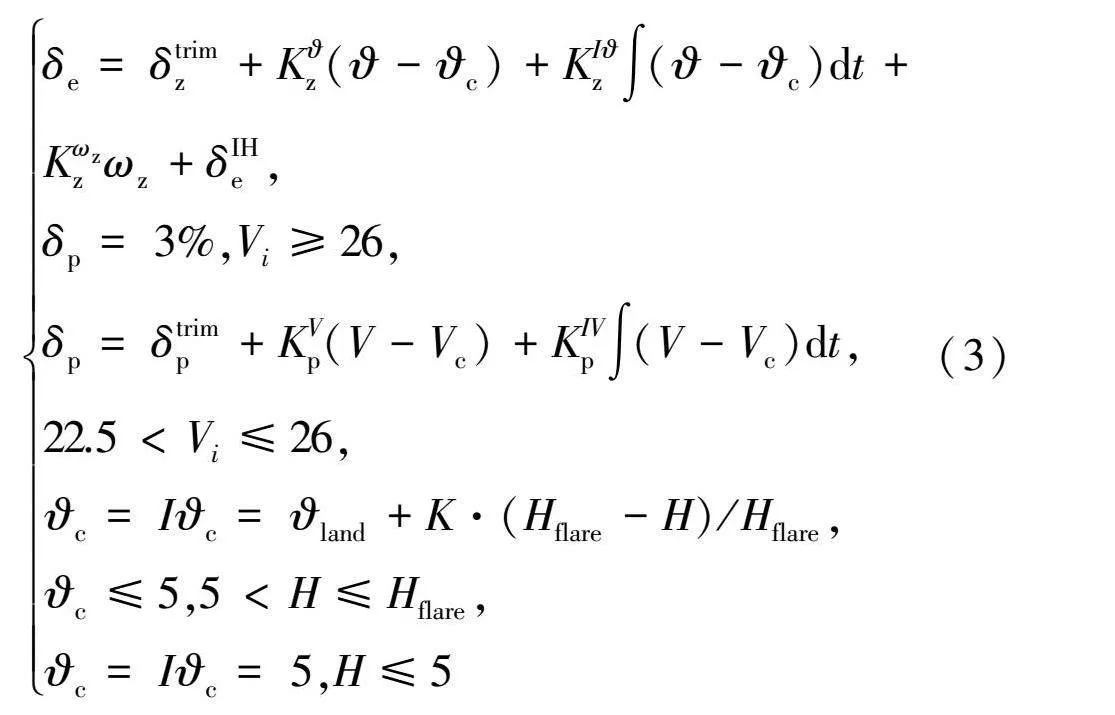
最后,得到具体的控制律表达如式(3)所示。
δe=δtrimz+Kz(-c)+KIz∫(-c)dt+
Kωzzωz+δIHe,
δp=3%,Vi≥26,
δp=δtrimp+KVp(V-Vc)+KIVp∫(V-Vc)dt,22.5<Vi≤26,
c=Ic=land+K·(Hflare-H)/Hflare,c≤5,5<H≤Hflare,
c=Ic=5,H≤5(3)
4"仿真对比与分析
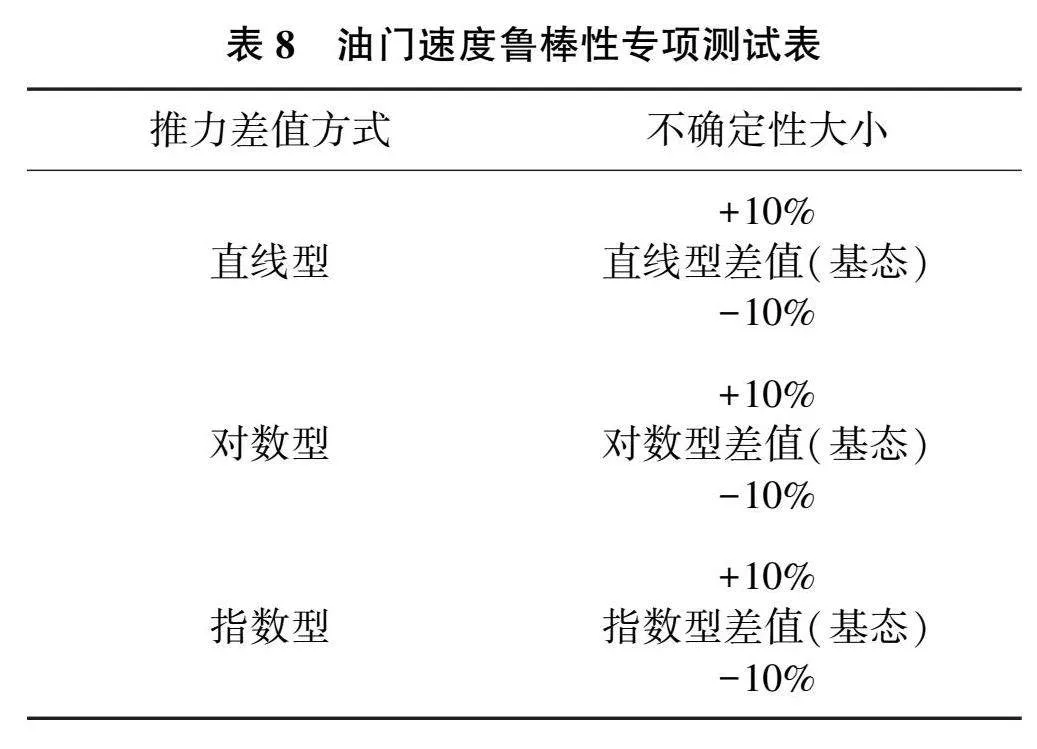
速度控制的首要目的就是要解决传统控制中小油门段推力非线性差造成的着陆适应性问题。为了验证,在速度控制鲁棒性科目中,创新性地新增了3种推力路径差值下的推力不确定性仿真算法,如图12所示。
由于对象无人机油门开度在10%以下非线性程度最强,故主要针对0%~10%区间内的油门推力底层气动函数的差值算法做出修改,模拟发动机本体推力不确定性大小变化的动态过程。其中,基于图12中3种推力差值所衍生出的油门速度鲁棒性测试组合如表8所示。
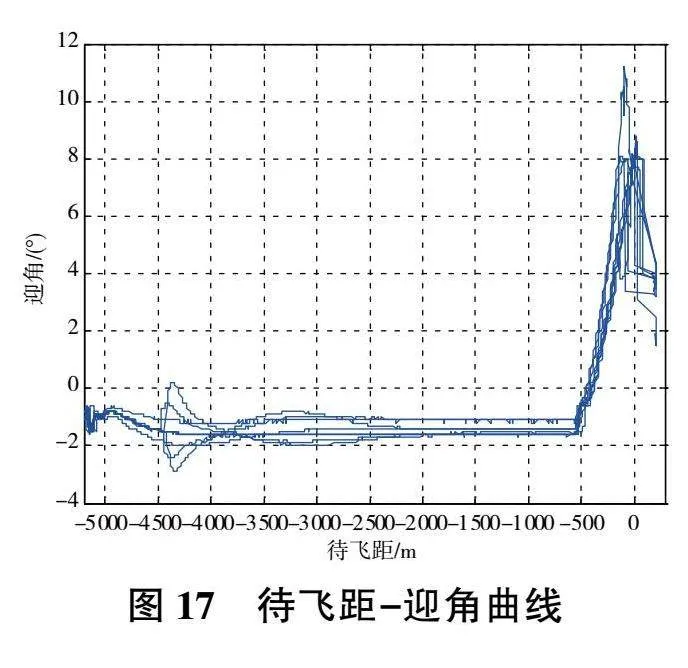
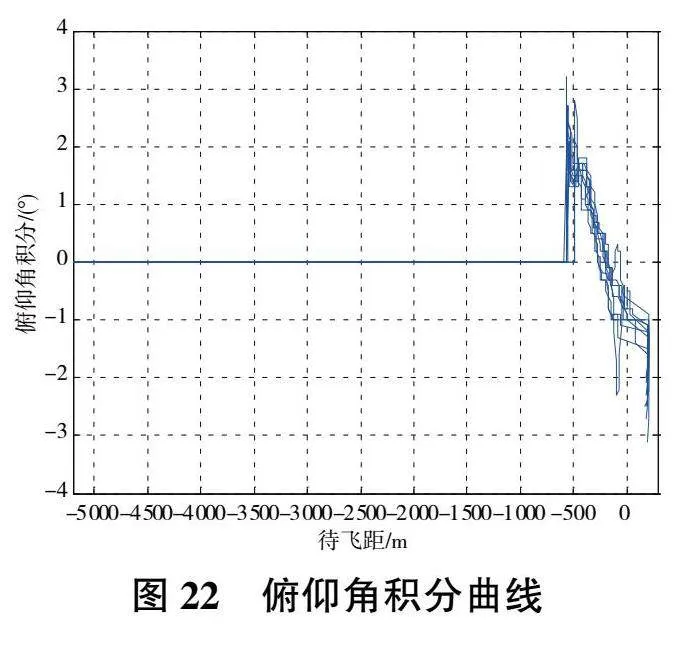
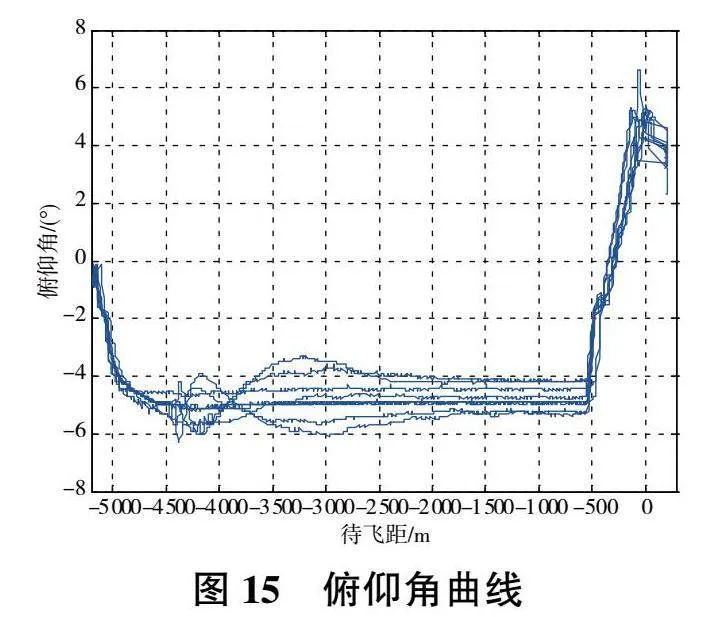
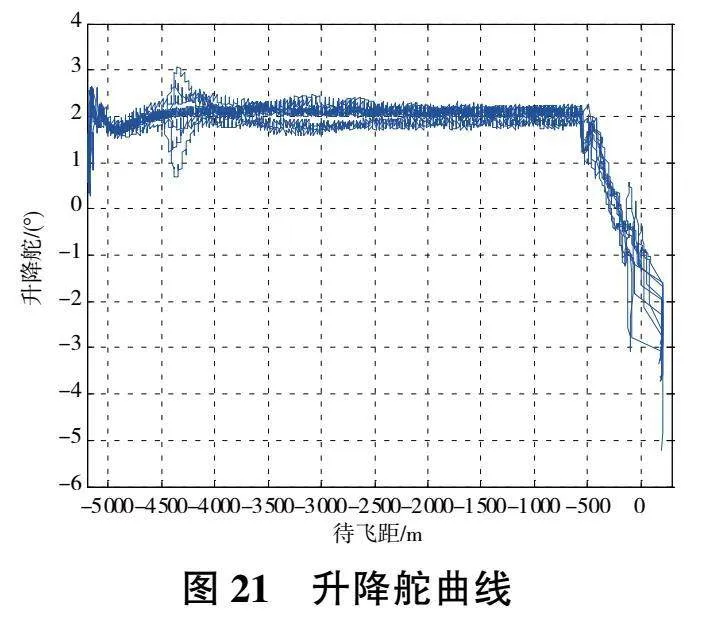
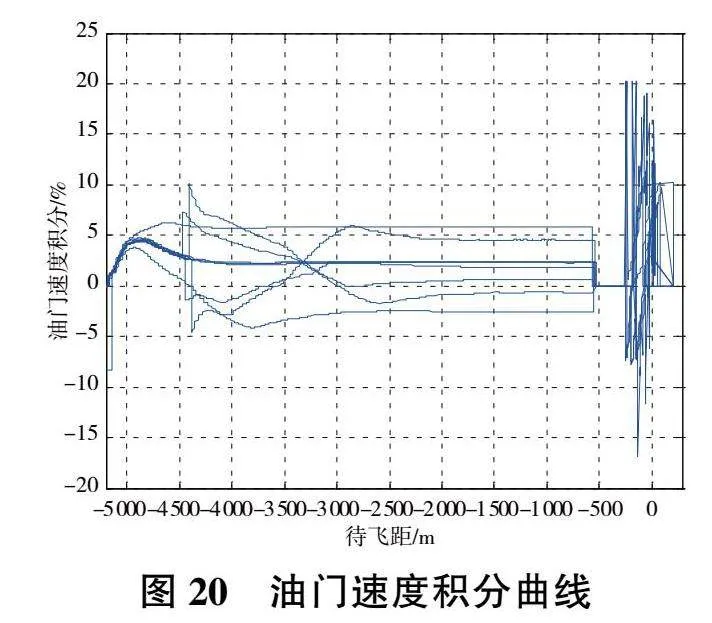
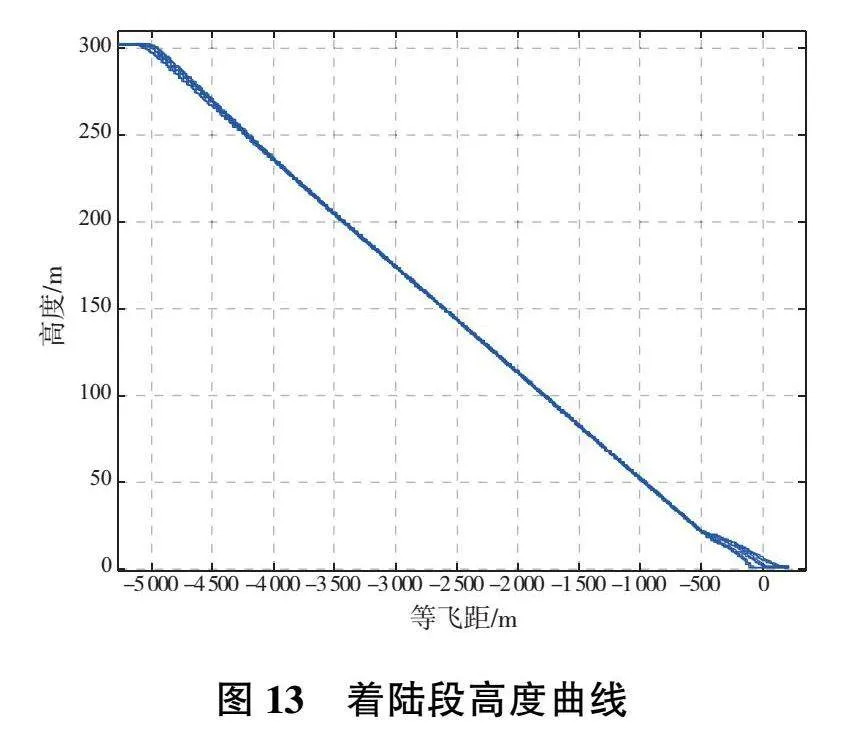
基于非线性实时仿真平台仿真结果如图13—图22所示。
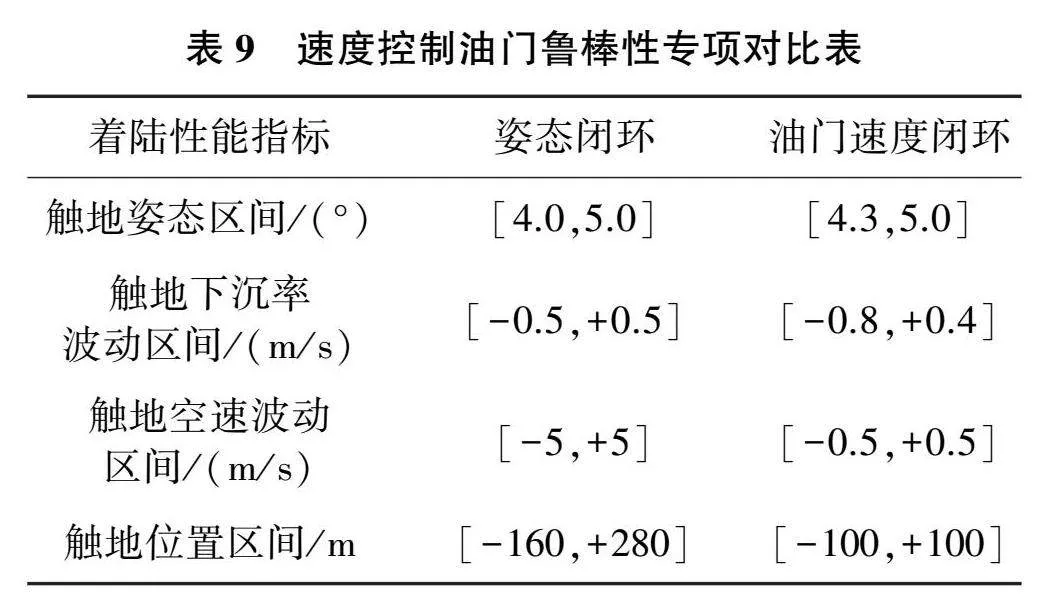
与传统姿态闭环控制律相比:从宏观上看,整个着陆过程的一致性有了显著提高,充分体现出速度控制结构“强一致性”的特点;从微观上看,速度控制的引入切实抓住了空速的主导权(着陆速度误差控制在±0.5m/s以内),下沉率的波动稍有偏大,俯仰角都能达到4°以上水平,对触地位置的一致性和精度也有了很大提高(由[-160m,+280m]提高至[-100m,+100m]之内)。综合其他鲁棒性测试科目,对比如表9所示。“波动区间”的描述方式为:下沉率以-1m/s为中心,空速以22.5m/s为中心,触地位置以基态0m为中心。
正是由于抓住了速度这一决定性参量,整个着陆过程才表现出如此的“强一致性”,这一现象也反向验证了之前的判断:空速在矛盾链条中处于主导地位这一重要观点。现将速度控制优势总结如下:
1)提高了全着陆过程、全鲁棒性状态的一致性;
2)缩短滑行距离,速度由“被动”化“主动”,在掌握空速的主控权后,触地速度一致性很高,有效缩短着陆后滑行距离至150m以内;
3)彻底摆脱了油门非线性区,工作区间处于10%以上;
4)提高了触地精度,由原来的“百米级”提高到“十米级”。
但是,在实际工程应用中,推力估算偏小的情况较为少见,实际推力偏大情况居多。但不论怎样变化,上述均属于推力不确定性的极端情况,下沉率都能维持在[-1.8m/s,-0.6m/s]之间,都在起落架能够承受的安全范围内。
5"结语
本文从对象无人机在数次飞行任务中的实际工程问题出发,小油门段推力非线性程度高、低速段敏感性强对着陆自主性的破坏,揭示了传统固定油门着陆控制方案的不合理性,以相对平衡段的制约关系为切入口,深入分析了浅下滑段的空速特性,并以空速为主要矛盾,创新性地提出油门速度闭环控制方案,在摆脱小油门段推力非线性问题的同时,着陆指标的一致性得到了显著提高。
通过非线性实时仿真平台和数个架次的外场试飞验证,证明了该控制策略的有效性。不论在方舱人员干预的操作上还是着陆的性能上,该控制策略较传统方案体现出了很强的稳定性和便利性,并将作为实验室日后解决首飞着陆问题的主要技术方案。
参考文献:
[1] 吴森堂,费玉华. 飞行控制系统[M]. 北京:北京航空航天大学出版社,2005.
[2] 胡兆丰,何植岱. 飞行动力学:飞机的稳定性和操纵性[M]. 北京:国防工业出版社,1985.
[3] 张蒙. 大展弦比无人机安全着陆纵向控制技术研究[D]. 南京:南京航空航天大学,2017.
[4] 宋辉. 复杂条件下无人机自动着陆控制技术研究[D]. 南京:南京航空航天大学,2011.
[5] 金伟. 小型双发固定翼无人机飞行控制系统设计[D]. 上海:上海交通大学,2019.
[6] 郭艳艳,陈澜,杨常伟. 无人机着陆抗风鲁棒H_∞控制器设计研究[J]. 计算机测量与控制,2010,18(2):348-350.
[7] 黄筱莺. 高超声速飞行器助推段纵向控制技术研究[D]. 南京:南京航空航天大学,2019.
[8] FAN Y M,DING M,CAO Y F. Vision algorithms for fixed-wing unmanned aerial vehicle landing system[J]. Science China Technological Sciences,2017,60(3):434-443.
收稿日期:20220926
