冶金工业中模糊自适应PID控制算法运用研究
2016-05-06 17:11诸天逸
山东工业技术 2016年9期
诸天逸

摘 要:模糊自适应PID控制算法可以结合古典PID控制,并结合特定工艺制作所需要的操作人员的长期积累的经验知识,实现了冶金温度控制过程中的升温、保温、降温控制,提高了产品质量,节约大量成本。
关键词:冶金;模糊控制;PID算法;自适应控制;多参量控制
DOI:10.16640/j.cnki.37-1222/t.2016.09.030
0 前言
随着科学技术的发展,冶金已经从狭义的从矿石提取金属,发展为广义的冶金与材料制备过程工程,冶金工业工艺过程也非常复杂,良好的温度控制是顺利完成冶金过程的保证。实际中冶金工业温度变化快,不能及时达到所需的工业生产温度而使成品率降低。为了解决上述问题,以时间和温度为控制参量,提出一套冶金工业中模糊自适应PID控制算法来对产品升温、保温、降温进行控制,来提高产品质量并节约成本。
1 项目概括
模糊自适应PID控制算法是一种最优控制的算法,在冶金工业中,冶金产品的质量、产量难以提高的原因即没有一种可靠的、高效的生产方案,而本文提出的模糊自适应PID控制算法,使得冶金工业生产的状态效率可以时刻处在一个超高水准。本文所论述的控制算法,可以使得冶金系统根据一定被测量量,而对整个系统自动化调节、优化。而运用传统的PID控制算法,将导致由于设计程序太过详细而导致PID控制难以实现。
在冶金工业中,其工艺要求精准、快速、恒温,并且特定的工艺制作需要操作人员长期积累的经验知识[1]。温度是时间的函数,对产品提高温度、恒定温度、降低温度所应该具备的控制模式也各不相同。本文提出的模糊自适应PID控制算法很好的解决了操作者经验、温度、时间多参量的算法控制以及高温度、恒定温度、降低温度这几种模式中的在线变换问题。
2 冶金工业中的模糊自适应PID控制算法
2.1 冶金温度控制要求及传统PID的缺陷
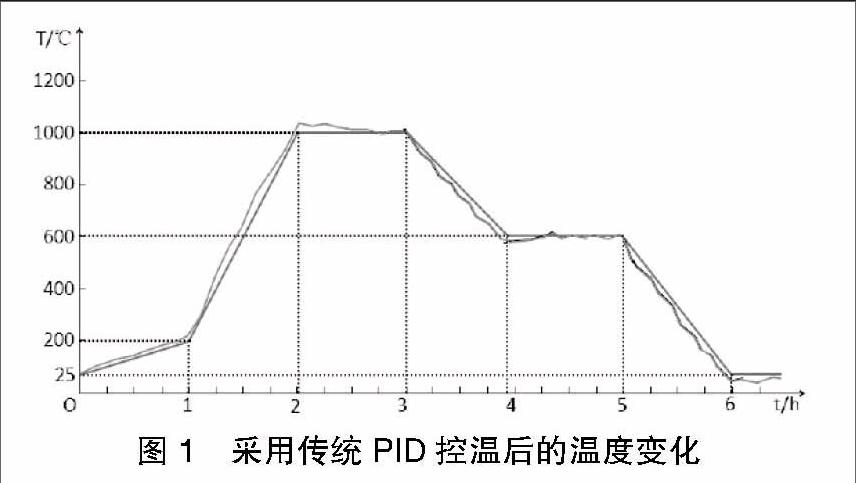
为了验证算法的有效性,进行一次实验。将冶金温度按照工艺需求设置进行多次变化,温度变化区间为室温(25摄氏度)至1000摄氏度,时间长度为6小时。传统PID算法温控后的温度曲线如图1所示。图中各个时刻所对应的温度点的采集,所用的是冶金工业用记录仪,记录仪是一种半机械装置,记录的温度数据可靠。由此可见,基于传统PID对冶金温度变化体系偏差的比例运算、积分运算和微分运算中,积分(I)虽然可将体系静态误差去除,提高控制系统无差度,但它可能对系统带来不稳定、摇摆等风险,并且,系统产生的大量累计误差无法消除。
2.2 PID多参数输入混合运算
该模糊自适应PID控制算法基于ST公司产的STM32F103RBT6芯片,根据实际操作情况,验证了本文算法的可靠性。
系统首先读入预先设计好的工艺要求的标准温度变化,系统通过温度传感器和自身时钟分别获取当前的温度和时间数据,并与提前读入的目标温度数据比对,由此将传感器的温度数据和目标温度一起进行比例(P)、积分(I)、微分运算(D)。并利用人工智能的方法将操作人员的调整经验作为知识存入计算机中,根据现场实际情况,计算机能自动调整PID参数,即是将古典的PID控制与先进的专家系统相结合,实现最佳控制策略[2]。
2.3 PID参数的模糊自适应调整
冶金工业中对于温度控制,在各个阶段的方式、要求并不相同,古典的方式是依靠冶金操作人员的经验控制,因为冶金工业的从业者经验不能够简单描述,在对系统控制过程中温度、时间等参量和评测标准不能用定量表示,因此利用模糊理论是解决这一问题的有效途径。自适应模糊PID温度控制器以温度误差e和温度误差变化e关于t的一阶导数作为输入,可以满足不同时刻的温度e和温度误差变化e关于t的一阶导数对PID参数自适应的要求,利用模糊控制规则在线对PID参数进行修改,便构成了自适应模糊PID控制器。PID参数模糊自适应是找出PID三个参数与温度e和温度误差变化e关于t的一阶导数之间的模糊关系,在运行中通过不断检测e和温度误差变化e关于t的一阶导数,根据模糊控制原理来对3个参数进行在线修改,以满足不同e和温度误差变化e关于t的一阶导数对控制参数的要求,而时冶金温度控制有良好的动、静态性能。
3 结论
应用模糊自适应PID控制算法后,实现了良好的冶金温度控制,如图2冶金温度采集数据图所示,如图可见,系统所控制的温度在测试的6小时内,围绕目标温度稳定变化。冶金的温度控制过程要求准确、迅速、恒温,而冶金所用的各种炉都是具有纯滞后的大惯性系统,升降温对于古典PID控制具有严重滞后性,该算法对温控系统有了很大的改善。
以上PID模糊自适应算法是基于古典PID算法的改进,在冶金工业中,运用线代控制理论在线辨识对象特征参数,实时改变其控制策略,使控制系统品质指标保持在最佳范围内,可以减轻冶金温度随着负荷变化及干扰因素影响。如此,提高了系统的精准性、可靠性等,此种对冶金温度的精确控制可广泛应用于冶金的高质量加工工艺。
参考文献:
[1]李洪桂.冶金原理[M].2005.
[2]王燕平.自动控制原理[M].2015.
猜你喜欢
山东冶金(2022年2期)2022-08-08
山东冶金(2022年1期)2022-04-19
山东冶金(2019年2期)2019-05-11
西南交通大学学报(2016年3期)2016-06-15
电子制作(2016年21期)2016-05-17
通信电源技术(2016年5期)2016-03-22
电源技术(2015年11期)2015-08-22