
一种航空发动机自适应控制方法与仿真
2015-08-06 13:04尹超
软件导刊 2015年7期
尹超
摘 要:介绍了一种自适应控制方法应用于航空发动机控制系统。在航空发动机过渡态控制过程中,发动机是一个系统参数时变的被控对象。通过利用状态反馈,设计了一种基于稳定参考模型的自适应控制算法,可以跟随时变系统在线调整控制参数。在确保控制系统稳定的基础上,有效提高了时变系统在全范围的控制品质和鲁棒性。
关键词:航空发动机;自适应控制;仿真
DOIDOI:10.11907/rjdk.151309
中图分类号:TP301 文献标识码:A 文章编号:1672-7800(2015)007-0046-02
0 引言
航空发动机是一个参数时变和具有不确定性干扰的高复杂系统。因此,航空发动机控制系统克服系统参数的变化和不确定性干扰,以确保系统的稳定性和控制品质,显得尤为重要[1]。
根据航空发动机的特点,一般的控制是采用可调控制增益的方法。本文提出一种自适应的控制方法,通过利用状态反馈,设计一种基于稳定参考模型的自适应控制算法,可以跟随时变系统在线调整控制参数,从而有效地提高控制品质,确保系统全局稳定[2]。
1 航空发动机建模
航空发动机的非线性数学模型如下所示:
式中,wf(t)为燃油输入量,p3(t)为高压压气机进口压力输出量,p5(t)为高压涡轮出口压力输出量,T5(t)为高压涡轮出口温度输出量,w(t)为有界不确定性干扰。
2 自适应控制律设计
根据被控对象的特点,设计参考模型,如下所示[3]:
设计的自适应控制律的形式如下所示[4]:
则航空发动机线性时变方程为[5]:
3 仿真
航空发动机过渡态控制的目标是使发动机转速在合理的时间内,克服过渡态中系统参数时变的影响以及外界的不确定性干扰,达到要求的目标转速,并在此过程中,发动机各工作截面的温度和压力在合理区间之内,不出现超温超压的现象。航空发动机控制系统硬件的回路仿真是将所设计的发动机控制律转换成目标码,下装至发动机控制器中,并将航空发动机控制系统硬件在回路试验环境中进行闭环仿真。首先,需搭建硬件回路仿真试验环境,包括实时仿真计算机、信号调理单元、电源模拟单元、通信单元以及故障注入单元等。然后,利用Matlab建立航空发动机的数学模型,以及各传感器、作动器等模型,并使用Matlab/RTW工具生成代码后,下装至实时仿真计算机内运行。在试验环境搭建完毕后,根据发动机调节计划推动油门杆,向发动机控制器发出目标转速指令。控制器根据发动机各工作截面参数,通过控制律计算出发动机的燃油供油量,以驱动发动机在规定时间内达到目标转速,并确保在此过程中不出现超温超压现象[6]。
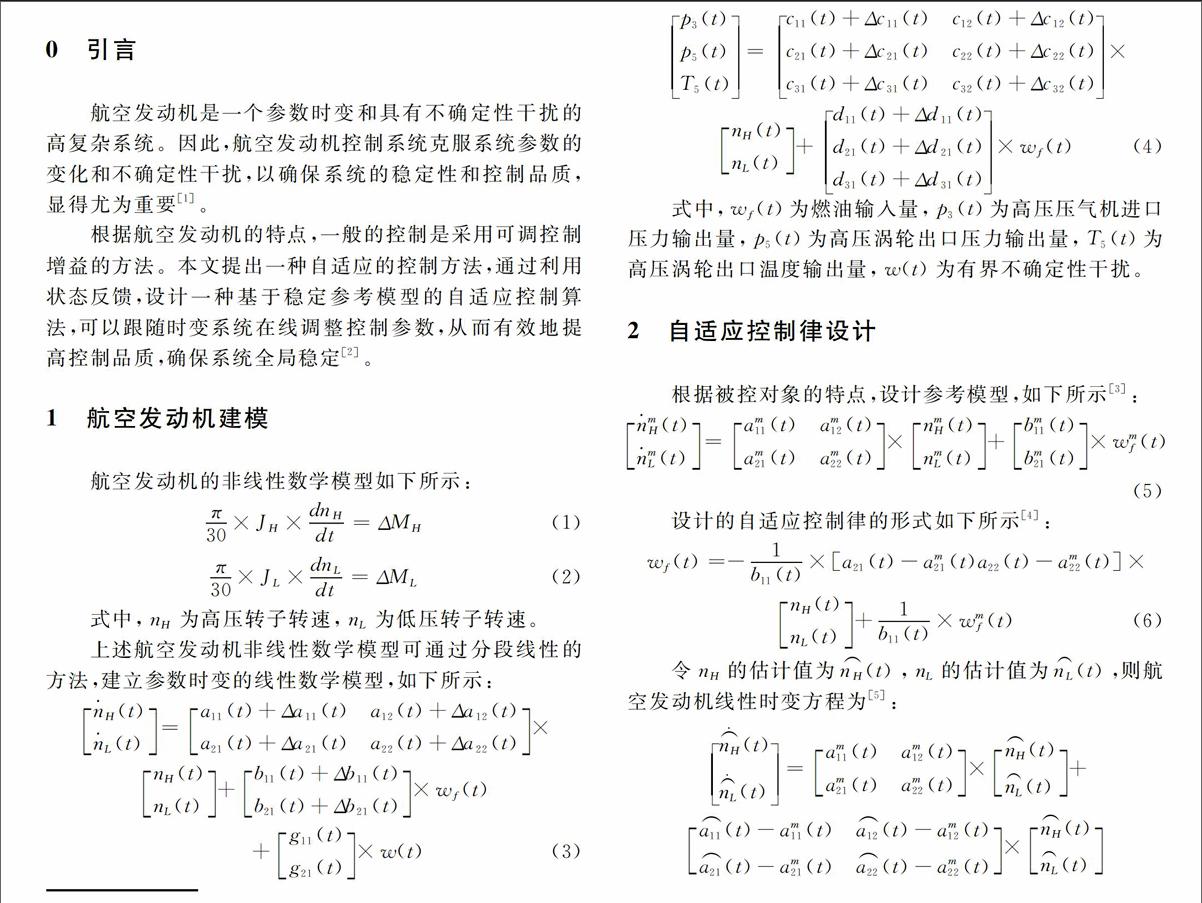
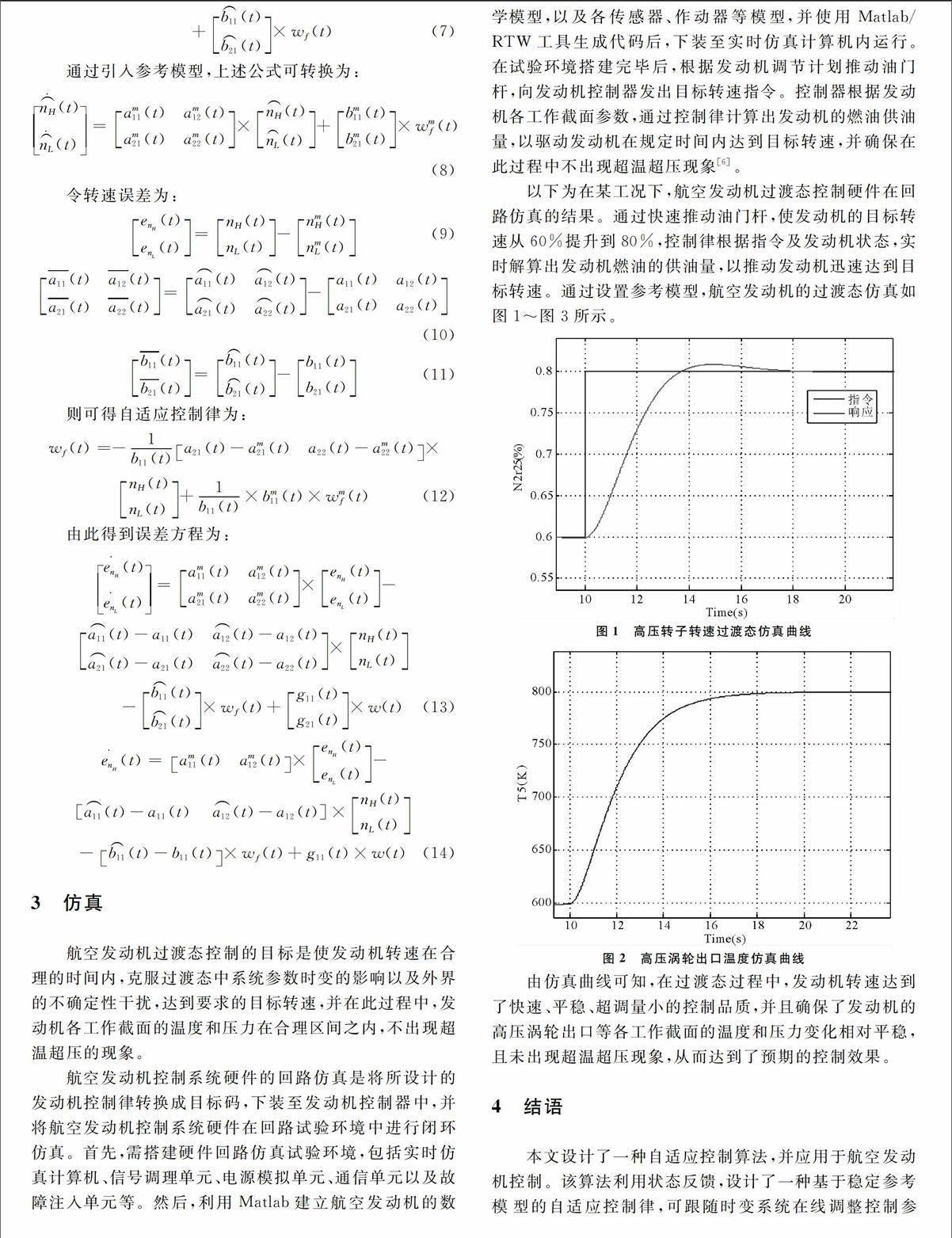
以下为在某工况下,航空发动机过渡态控制硬件在回路仿真的结果。通过快速推动油门杆,使发动机的目标转速从60%提升到80%,控制律根据指令及发动机状态,实时解算出发动机燃油的供油量,以推动发动机迅速达到目标转速。通过设置参考模型,航空发动机的过渡态仿真如图1~图3所示。
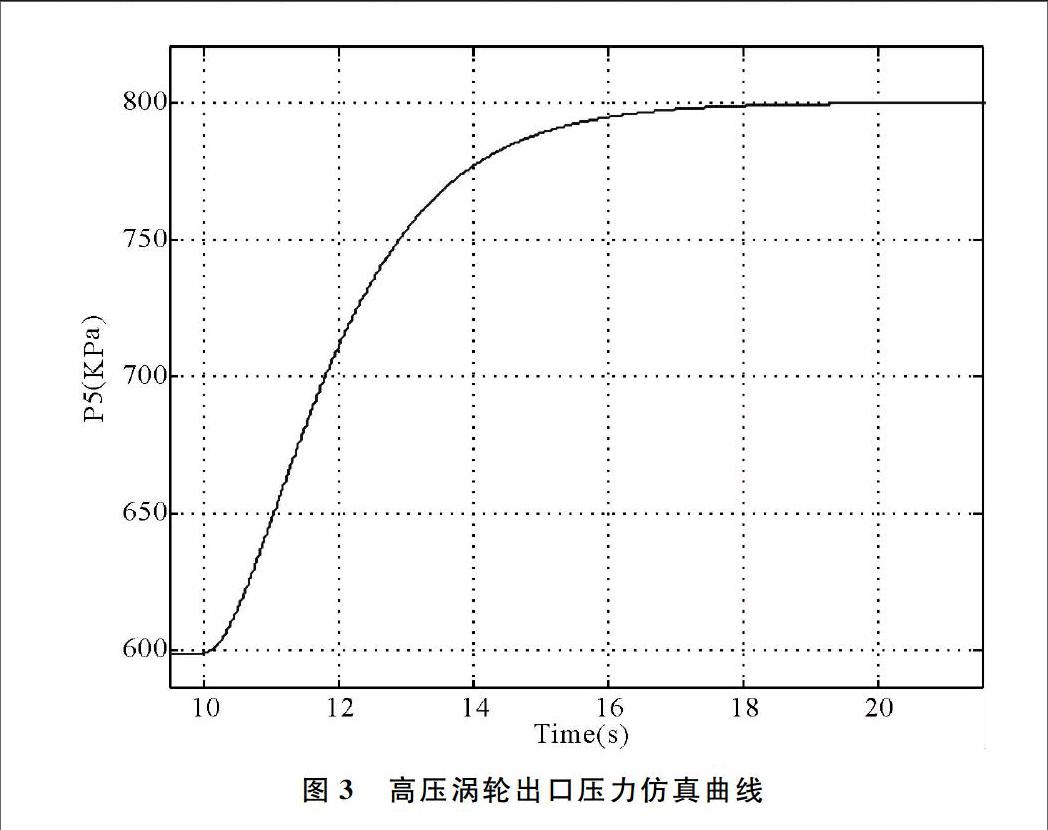
由仿真曲线可知,在过渡态过程中,发动机转速达到了快速、平稳、超调量小的控制品质,并且确保了发动机的高压涡轮出口等各工作截面的温度和压力变化相对平稳,且未出现超温超压现象,从而达到了预期的控制效果。
4 结语
本文设计了一种自适应控制算法,并应用于航空发动机控制。该算法利用状态反馈,设计了一种基于稳定参考模型的自适应控制律,可跟随时变系统在线调整控制参数,有效提高控制品质和鲁棒性。通过对航空发动机某工况下的过渡态控制仿真,结果表明:该算法在确保发动机的温度、压力状态可控的条件下,有效地提高了控制品质。
图3 高压涡轮出口压力仿真曲线
参考文献:
[1] 赵琳,樊丁,陕薇薇.航空发动机过渡态全局寻优控制方法研究[J].航空动力学报,2007,22(7):1200-1203.
[2] GAN YONGMEI,ZHOU FENGQI. Robust H∞ control and design of launch vehicle attitude control system[J].Missile and guide transaction,1999.
[3] Y W CHO, C W PARK, J H KIM,et al. Indirect model reference adaptive fuzzy control of dynamic fuzzy-state space model[J].IEE Proc,Contrt,2001.
[4] ITAHAK BARKANA.Simple adaptive control for non-minimum phase autopilot design[C].AIAA Guidance, Navigation and Control Conference,2004.
[5] SON KUSWADI, MITSUJI SAMPEIT,SHIGEKI NAKAURAT.Model reference adaptive fuzzy control for one linear actuator hopping robot[C].The IEEE International Conference on Fuzzy Systems,2003.
[6] 吴君凤,郭迎清.发动机稳态与过渡态控制集成设计仿真验证[J].航空动力学报,2013,28(6):1436-1440.
(责任编辑:黄 健)
猜你喜欢
中国科技纵横(2016年20期)2016-12-28
新教育时代·教师版(2016年26期)2016-12-06
电脑知识与技术(2016年25期)2016-11-16
数字技术与应用(2016年9期)2016-11-09
数字技术与应用(2016年9期)2016-11-09
科技视界(2016年18期)2016-11-03
科技视界(2016年18期)2016-11-03
科技视界(2016年14期)2016-06-08
计算技术与自动化(2015年3期)2015-12-31
计算技术与自动化(2015年3期)2015-12-31