
丘陵山地翻耕机具姿态调整系统设计与仿真
2024-07-04 21:17:19施正发袁奎余佳斌胡勇贺乘龙张富贵艾永峰
湖北农业科学 2024年6期
关键词:仿真分析
施正发 袁奎 余佳斌 胡勇 贺乘龙 张富贵 艾永峰

摘要:针对现有丘陵山地翻耕作业机具姿态调整系统在复杂作业工况下调整和控制精度不高,导致机具作业稳定性和作业安全性较差的问题,基于机具横向姿态调整系统,利用模糊PID控制算法设计出一套适用于丘陵山地翻耕作业的机具姿态调整系统。以常规PID控制算法为对照,在姿态调整系统动力学建模的基础上,通过MATLAB对其进行仿真分析,结果表明,常规PID控制算法的机具横向姿态调整时间为4.5 s,横向姿态角的超调量为0.89°;模糊PID控制算法的机具横向姿态调整时间为1.9 s,横向姿态角基本无超调。仿真试验结果验证了该机具姿态调整系统的可行性、正确性和科学性,调整系统精度和稳定性能满足丘陵山地横坡作业复杂的工况要求。
关键词:丘陵山地;翻耕机具;姿态调整系统;模糊PID控制算法;仿真分析
中图分类号:S232 文献标识码:A
文章编号:0439-8114(2024)06-0207-06
DOI:10.14088/j.cnki.issn0439-8114.2024.06.034 开放科学(资源服务)标识码(OSID):
Design and simulation of attitude adjustment system for tillage equipment in hilly and mountainous areas
SHI Zheng-fa1,YUAN Kui2,YU Jia-bin1,HU Yong1,HE Cheng-long1,ZHANG Fu-gui2,AI Yong-feng3
(1. Guiyang Branch of Guizhou Tobacco Corporation, Guiyang 550004, China;2. College of Mechanical Engineering, Guizhou University, Guiyang 550025, China;3. Tongren Branch of Guizhou Tobacco Corporation, Tongren 554300, Guizhou, China)
Abstract: In response to the problem of low adjustment and control accuracy of the existing attitude adjustment system for tillage equipment in hilly and mountainous areas under complex operating conditions, which led to poor stability and safety of the equipment operation,based on the lateral attitude adjustment system of the equipment, a set of attitude adjustment system suitable for hilly and mountainous tillage operations was designed using the fuzzy PID control algorithm. Compared with the conventional PID control algorithm, based on the dynamic modeling of the attitude adjustment system, simulation analysis was conducted using MATLAB. The results showed that the lateral attitude adjustment time of the conventional PID control algorithm was 4.5 seconds, and the overshoot of the lateral attitude angle was 0.89°;the lateral attitude adjustment time of the implement using the fuzzy PID control algorithm was 1.9 seconds, and there was basically no overshoot of the lateral attitude angle. The simulation test results had verified the feasibility, correctness, and scientificity of the attitude adjustment system of the equipment. The accuracy and stability performance of the adjustment system met the requirements of complex working conditions in hilly and mountainous cross slope operations.
Key words: hilly and mountainous areas; tillage equipment; attitude adjustment system; fuzzy PID control algorithm; simulation analysis
在农业生产中,丘陵山地多为6°~15°的复杂坡地,其面积在中国国土面积中占比接近70%[1]。丘陵山地坡度特征明显,地形地貌较复杂,且其耕地地表高低起伏,在一定程度上导致动力平台车身的倾斜,行驶和作业稳定性较差[2,3]。尤其是牵引作业时,所悬挂机具的姿态和位置会伴随动力平台行驶路径的变化而不断改变,导致机具不能和动力平台车身始终保持水平挂接状态,影响丘陵山地翻耕环节的作业效果和作业质量[4-6]。为实现机具在丘陵山地的仿形作业,动力平台需具备车身和机具横向姿态实时调整功能[7,8]。现阶段,国内外在丘陵山地动力平台车身调平方面已开展大量的研究工作,并取得丰硕的研究成果,但针对机具横向姿态调整的研究较少。对于丘陵山地耕地状况而言,亟需具备横向姿态可调的机具以满足农业生产需求。
邵明玺等[9]设计了一种基于模糊PID控制算法的农机具横向姿态调整系统,但该系统还是以车身倾角代替耕地地面的倾角,难以满足丘陵山地实际作业需求。范永奎等[10]基于丘陵山地复杂地形地貌,提出一种带死区经典PID控制算法的电液悬挂仿形机构横向姿态调整系统,解决了传统电液悬挂仿形机构仿地作业时适应性较差的问题。周浩等[11]设计一种由旋耕装置、调平装置及液压系统等组成的旋耕机自动调平控制系统,采用PID控制算法实现农机具姿态的自动调整。胡炼等[12]设计了一套维持农机具在田间作业时的水平状态的方法。然而,现有机具姿态调整的研究仍然局限于机具横向姿态的调节能力,始终无法满足丘陵地区复杂作业条件对机具作业多样化的迫切需求[13-15]。
针对机具姿态调整系统在复杂作业工况下调整和控制精度不高以及通常只能应用于静止状态的现状,本研究在设计的机具横向姿态调整系统基础上,通过传感控制技术设计出一种丘陵山地翻耕作业机具姿态调整系统。为提高该调整系统的稳定性和精度,采用模糊PID控制算法对其进行仿真分析,以验证该调整系统性能及控制方法的正确性和可行性。
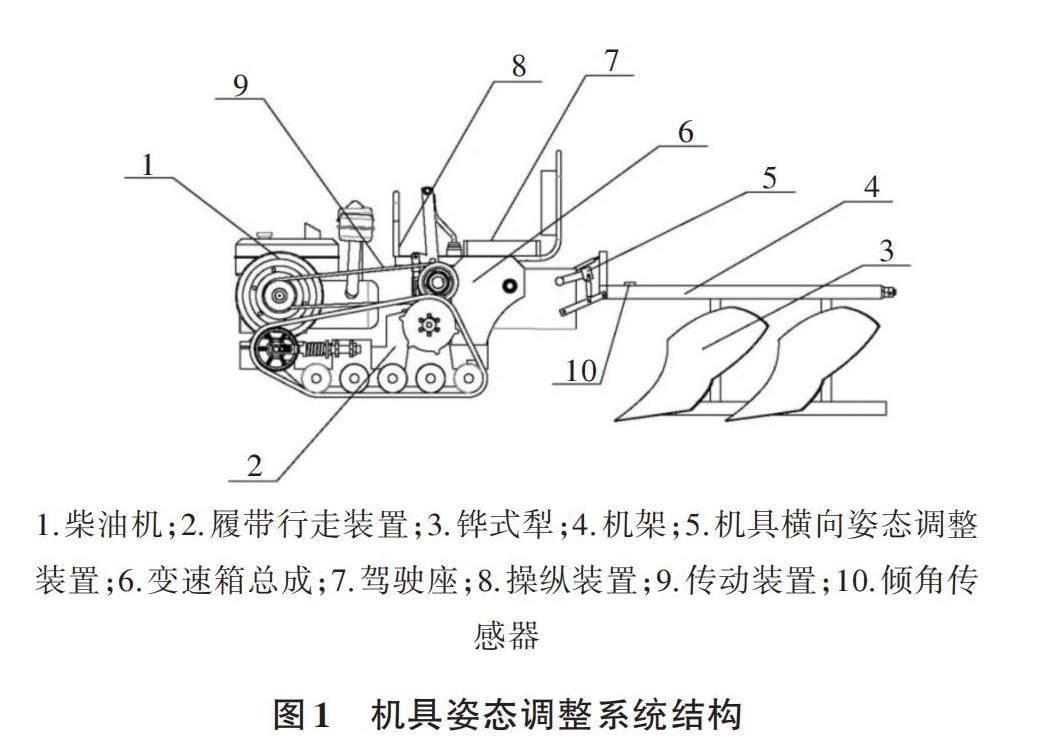
1 机具姿态调整系统设计
机具姿态调整系统结构如图1所示,主要由动力平台(柴油机、履带行走装置、变速箱总成及传动装置等)、机具横向姿态调整装置、铧式犁和倾角传感器等构成。其中,机具横向姿态调整装置与动力平台三点悬挂连接,铧式犁通过销轴悬挂于机具横向姿态调整系统的后方,铧式犁通过横向调整油缸的伸缩实现相对于动力平台的左右摆动,检测装置安装于机架上方。
1.1 机具横向姿态调整系统
应用于丘陵山地的动力平台因受到坡陡弯多的复杂作业地形限制,作业过程中容易倾斜行驶,加之动力平台和翻耕机具姿态相对固定,因此翻耕机具会随着动力平台的倾斜而倾斜作业,导致其翻耕作业效果和作业效率不够理想。此外,现有翻耕机具姿态还处于手动机械调整阶段,费时费力且不能实时调整。鉴于此,本研究设计了一种翻耕机具横向姿态调整装置,如图2所示。挂接轴安装于动力平台变速箱总成的后方,纵向调整液压缸底部套装在挂接轴上,纵向调整液压缸活动端和机架销轴连接,左、右提升臂安装于挂接轴两端,左、右横向调整液压缸底部分别和左、右提升臂铰接,左、右横向调整液压缸活动端分别铰接安装在左、右下拉杆的中部,左、右横向调整液压缸无杆腔通过油管连接,左、右下拉杆均铰接安装在机架前端。
机具横向姿态调整系统运动分析系统如图3所示,点[A]和点[B]分别为左、右横向调整液压缸与左、右提升臂的连接处,[C2E]为耕作地表的水平线,[θ]为农机具横向姿态和[C2E]的夹角。点[C1]和点[D1]分别为左、右横向调整液压缸的初始位置,点[C2]和点[D2]分别为横向姿态调整后左、右横向调整液压缸位置,[O]为[C1D1](或[C2D2])的中点。在翻耕机具横向姿态调整过程中,因左、右横向调整液压缸的参数完全一致,采用中心调平的原理,假设点[O]是固定的,其与左、右提升臂的相对高度保持恒定,翻耕机具以点[O]为旋转中心进行横向姿态的调整和控制,左、右横向调整液压缸的活塞杆伸缩长度均为[Δl]。
[Δl=l1-l0=l0-l2] (1)
式中,[l1]为姿态调整后左横向调整液压缸长度;[l2]为姿态调整后右横向调整液压缸长度;[l0]为姿态调整前横向调整液压缸长度。
由余弦定理可知,夹角[θ]与横向调整液压缸活塞杆的伸缩长度[Δl]之间的数学关系如式(2)所示。
[θ=arccos1-2Δl2l2=arccos1-2l21+2l22-4l1l2l2] (2)
式中,[l]为左、右横向调整液压缸的初始位置长度。
1.2 机具姿态调整原理
丘陵山地翻耕作业机具姿态调整控制系统如图4所示,假设动力平台作业时机具姿态调整的目标角为[θ],此时倾角传感器实时检测到的机具横向姿态和水平面的夹角为[θ0],[lM]为横向调整液压缸的活塞杆位移期望值,[I]为横向调整液压缸比例换向阀的输入电流。
机具姿态调整控制系统的农机具模糊PID控制环使得动力平台和翻耕机具作业时处于目标角度,机具倾角和调整液压缸位移的计算公式如下。
[l1=l0+22l1-cos(arctanθ)] (3)
[l2=l0-22l1-cos(arctanθ)] (4)
1.3 液压系统工作原理
根据丘陵山区复杂地形环境及动力平台仿形作业需求,采用电液控制技术设计闭心式负载敏感丘陵山地翻耕作业机具姿态调整控制液压系统,如图5所示。姿态调整控制液压系统主要由差压式溢流阀、负载敏感单向阀、定差减压阀、比例换向阀、可调节单向节流阀和调整液压缸等组成。其中,左、右横向调整液压缸无杆腔通过油管连接,通过由可调单向节流阀、定差减压阀和比例换向阀组成的比例调速阀来控制横向调整液压缸活塞杆的伸缩,实现对机具横向角度的调整。此外,通过由比例提升阀、比例下降阀和定差减压阀等组成的比例调速阀来控制纵向调整液压缸活塞杆的伸缩,以实现对机具纵向位置的调整。
在液压系统工作过程中,定差减压阀可补偿比例换向阀和比例提升阀的前后压差,实现液压缸通过流量的相对稳定,保证执行机构运动速度不受外来负载波动的影响。定差减压阀在进行压力补充过程中,配套的可调单向节流阀具备保压作用,从而减缓对定差减压阀阀芯的冲击,有效解决由流量阀和定量泵组成的传统节流调速回路在低速负载下承载能力较差的问题。
闭心式负载敏感机具姿态调整控制液压系统具有较好的速度刚性,能根据系统负载能量和压力需求对齿轮泵的流量进行调整,实现齿轮泵的流量和功率与工作负载需求相适应。该系统适用于丘陵山区动力平台输出负载波动较大及速度平稳性要求较高的场合。
2 机具姿态调整系统建模
2.1 机具姿态调整系统数学模型
丘陵山地翻耕作业机具姿态调整系统的控制对象为阀控液压缸模型,并假设控制阀为理想的零开口滑阀,则阀芯压力和位移的改变将瞬间产生流量的变化。为便于控制系统设计及仿真分析,需建立阀控液压缸数学模型,阀的节流方程如下。
[Ql=Kqxv-KcpL] (5)
式中,[Ql]为负载流量;[Kq]为稳态流量增益;[xv]为阀芯位移;[Kc]为稳态压力-流量系数;[pL]为调整油缸的负载压降。
横向调整液压缸的流量连续方程如下。
[Ql=Apdydt+Vt4βedpLdt+CtpL] (6)
[Ct=cec2+cic] (7)
式中,[Ap]为液压缸工作有效面积;[y]为液压缸活塞位移;[Vt]为液压缸总容积;[βe]为油液体积弹性模量;[pL]为负载压力;[Ct]为液压缸总泄露系数;[cec]为液压缸外泄露系数;[cic]为液压缸内泄露系数;t为时间。
横向调整液压缸的力平衡方程如下。
[AppL=Mtd2ydt2+Bpdydt+ky+FL] (8)
式中,[Mt]为活塞及负载的质量;[Bp]为黏性阻力系数;[k]为活塞及负载的总刚度;[y]为液压缸活塞位移;[FL]为液压缸外部负载。
若不考虑耕作土壤的阻力作用,即不计外部负载的影响,对阀控液压缸数学模型进行简化,并对式(5)至式(8)进行Laplace变换,从而获得系统传递函数。
[Gs=KqApss2w2h+2ξhw2hs+1] (9)
[wh=4βeA2VtMt] (10)
[ξh=KceAβeMtVt+BpAVtβeMt] (11)
式中,[Gs]为系统传递函数;s为传递函数的自变量;[wh]为系统固有频率;[ξh]为系统阻力系数;[A]为活塞有效面积;[Kce]为总流量压力系数。
2.2 模糊PID控制器设计
为提高丘陵山地翻耕作业机具姿态调整系统的动态性能和稳定性能,需对PID控制器的比例系数、积分系数和微分系数进行调节,改变3个环节的增益。在“2.1”中机具姿态调整系统数学模型的基础上,结合PID控制器系数与系统稳态性能和动态性能的关系,采用试验法对控制器系数进行整定。在上述系数整定过程中,需对系统进行多次试验调整,加之系统的非线性特性,在对机具姿态主动控制系统进行建模时需进行一定假设,从而对非线性特性进行局部线性化处理,此举将会影响到控制系统的动态性能。而基于模糊推理和规则可以实现非线性映射,从而充分发挥PID控制器最佳的控制性能,同时也可保证系统最佳的控制效果。
PID控制器的输入量[e(t)]和输出量[u(t)]之间的数学关系如下。
[u(t)=KPe(t)+KI0te(t)dt+KDd[e(t)]dt] (12)
式中,[KP]为比例系数;[KI]为积分系数;[KD]为微分系数。
若要获得较满意的控制性能和效果,需根据系统实时状态对PID控制器的3个系数进行调节。本研究采用模糊PID控制器对翻耕机具姿态调整系统进行智能控制,输入量为偏差量[e(t)],输出量为修正系数[ΔKP]、[ΔKI]和[ΔKD],基于模糊PID控制器参数原理如图6所示。
[KP=K′P+ΔKPKI=K′I+ΔKIKD=K′D+ΔKD] (13)
式中,[K′P]、[K′I]和[K′D]为控制系统初始值。
丘陵山地翻耕作业机具姿态调整系统的输入量[e(t)]和[ec(t)]的论域定为13级,为[-6,6]。输出变量[ΔKP]、[ΔKI]和[ΔKD]的论域也定为13级,为[-6,6]。
3 仿真分析
在丘陵山地翻耕作业机具姿态调整系统建模的基础上,基于MATLAB的SIMULINK可视化仿真模块建立机具姿态调整系统的动力学模型。通过试验方法对所建立的模糊PID控制器的比例环节、微分环节和积分环节系数进行整定,系统主要的模型参数如表1所示,基于模糊PID控制算法的SIMULINK仿真模型如图7所示。
根据丘陵山地动力平台的作业平面倾斜角度和整机结构尺寸,仿真分析时设定机具横向姿态倾角的初始值为0°,给定信号源15°的阶跃信号。仿真分析结果如图8所示,图8a为常规PID控制算法下机具横向姿态控制仿真结果,上升时间为4.5 s,机具横向姿态角的超调量为0.89°;图8b为模糊PID控制算法下农机具横向姿态控制仿真结果,上升时间为1.9 s,农机具横向姿态角基本无超调。SIMULINK仿真结果验证了本研究设计的丘陵山地翻耕作业机具姿态调整系统的可行性、正确性和科学性,同时模糊PID控制算法能显著减少翻耕机具姿态调整时间和机具横向姿态角的超调量。
4 小结
针对丘陵山地翻耕作业机具作业效果和作业效率不够理想的问题,本研究在机具横向姿态调整装置的基础上,利用模糊PID控制算法开发出一套适用于丘陵山地翻耕机具姿态调整系统。采用电液控制技术设计闭心式负载敏感机具姿态调整液压系统,该系统具有较好的速度刚性,适用于丘陵山区动力平台输出负载波动性较大及速度平稳性要求较高的场合。在丘陵山地翻耕作业机具姿态调整系统建模的基础上,利用MATLAB建立翻耕机具姿态调整系统的动力学模型。仿真分析结果表明,在本研究控制算法下,丘陵山地翻耕机具横向姿态调整时间为1.9 s,且机具横向姿态角基本无超调,该调整系统精度和稳定性满足了丘陵山地横坡作业复杂的工况要求。
参考文献:
[1] 李 钊,樊桂菊,张 昊,等.农机具自动调平现状及趋势分析[J].中国农机化学报,2019,40(4):48-53.
[2] 石 兵,程登慧,康志亮.丘陵山地农机具的自动调平系统设计[J].湖北农业科学,2019,58(23):207-210.
[3] 鄢 敏,袁 奎,易 蔓,等.基于单片机的小型犁耕机自动调平系统设计[J].现代农业科技,2022(13):108-112.
[4] 夏长高,杨宏图,韩江义,等.山地拖拉机调平系统的研究现状及发展趋势[J].中国农业大学学报,2018,23(10):130-136.
[5] 孙景彬,刘志杰,杨福增,等.丘陵山地农业装备与坡地作业关键技术研究综述[J].农业机械学报,2023,54(5):1-18.
[6] 蒋 俊,张 建,冯贻江,等.丘陵山地拖拉机电液悬挂系统的设计与仿真分析[J].浙江师范大学学报(自然科学版),2019, 42(1):31-35.
[7] 杨福增,牛瀚麟,孙景彬,等.山地履带拖拉机与农具姿态协同控制系统设计与试验[J].农业机械学报,2022,53(1):414-422.
[8] 张锦辉,李彦明,齐文超,等.基于神经网络PID的丘陵山地拖拉机姿态同步控制系统[J].农业机械学报,2020,51(12):356-366.
[9] 邵明玺,辛 喆,江秋博,等.拖拉机后悬挂横向位姿调整的模糊PID控制[J].农业工程学报,2019,35(21):34-42.
[10] 范永奎,翟志强,朱忠祥,等.丘陵山地拖拉机电液悬挂仿形控制系统研究[J].农业机械学报,2020,51(S1):517-524.
[11] 周 浩,胡 炼,罗锡文,等.旋耕机自动调平系统设计与试验[J].农业机械学报,2016,47(S1):117-123.
[12] 胡 炼,林潮兴,罗锡文,等.农机具自动调平控制系统设计与试验[J].农业工程学报,2015,31(8):15-20.
[13] 齐文超,李彦明,陶建峰,等.丘陵山地拖拉机姿态主动调整系统设计与实验[J].农业机械学报,2019,50(7):381-388.
[14] 彭 贺,马文星,王忠山,等.丘陵山地拖拉机车身调平控制仿真分析与试验[J].吉林大学学报(工学版),2019,49(1):157-165.
[15] 李明生,赵建军,朱忠祥,等.拖拉机电液悬挂系统模糊PID自适应控制方法[J].农业机械学报,2013,44(S2):295-300.
猜你喜欢
科学与财富(2016年18期)2016-12-22 17:50:59
科技创新与应用(2016年33期)2016-12-17 12:31:48
中小企业管理与科技·下旬刊(2016年10期)2016-11-18 20:11:04
中小企业管理与科技·上旬刊(2016年10期)2016-11-15 10:03:03
中国科技博览(2016年22期)2016-11-01 13:48:02
中国科技博览(2016年26期)2016-10-24 20:35:34
科技视界(2016年15期)2016-06-30 12:57:06
科技视界(2016年8期)2016-04-05 23:23:25
科技视界(2016年7期)2016-04-01 09:44:30
中国市场(2016年8期)2016-03-07 16:48:46
