半挂汽车列车直角转弯仿真分析
2016-11-15 10:03周志宏张中举闫彬
中小企业管理与科技·上旬刊 2016年10期
关键词:仿真分析
周志宏+张中举+闫彬

摘 要:半挂汽车列车通过直角弯道时为避免碰轧内角点、越出边界线,需要规划合理的行车路径。为验证驾驶人经验路径的合理性,建立了半挂车组转弯模型,确定了半挂车组转弯路径算法,以驾驶人操作某型半挂车为例,结合车辆参数及直角转弯标准场地环境参数对经验路径进行仿真。仿真图与实车试验在变化趋势及数值精度上保持了一致,比较真实地反映了半挂车组直角转弯的避障要求,验证了驾驶人经验操作的合理性,说明建立的半挂车组转弯模型及算法具有一定的适用性和可靠性,为直角转弯操控行为由经验型向数字化、精准化转变提供理论参考。
关键词:半挂汽车列车;直角转弯;仿真分析
中图分类号: TP29 文献标识码: A 文章编号: 1673-1069(2016)28-138-2
0 引言
半挂汽车列车车宽体长,转弯半径大,内轮差大[1-2],通过直角弯道时,为防止出现碰轧内直角点、越出边界线等不当现象,根据预瞄—跟随系统理论[3], 驾驶员需先设计合理的行车路径即预瞄轨迹,再做出最优转向盘转角输入,让行驶曲率尽可能与预瞄量接近[4]。相比实车试验,计算机仿真能有效降低随机变化和误差的影响,可全面地观察整个仿真过程,并且能够直观的得到仿真曲线[5]。本文仿真分析半挂车直角转弯运行轨迹,验证驾驶人经验性操作的规范性,为进一步开发人工智能辅助操控系统提供理论参考。
1 问题描述
图1所示[6],驾驶人操控半挂车前行一次性通过左前方直角弯道时,要设计一条行车路径,以避免车体左侧碰轧弯道内侧的突起点A,并要保证车身左右两侧及前端均不越出四条边界线。为方便研究,依据实践经验合理设定直角弯道场地,进出道路极限尺寸在图上标出。
2 半挂汽车列车转弯模型
2.1 条件假设
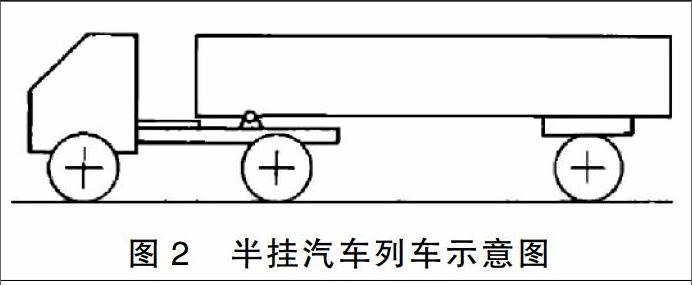
视操作规程为一个目标路径规划与运动控制有机结合的问题,假设如下:①场地平坦,低速通过,不考虑车辆侧滑和跑偏,忽略转向机构响应时间、车辆本身各种机械偏差等影响;②如图2所示,牵引车和半挂车车体通过鞍座相连,视为两个不同的刚体。
2.2 全车模型
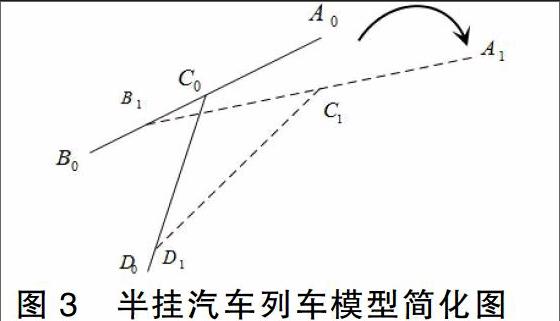
参考相关文献,全车模型可设为图3中两根无质量的刚性铰接杆A0B0与C0D0:A0、B0分别为牵引车的转向桥中点、后桥中点,C0为牵引车与半挂车连接部件鞍座的中心点,D0为挂车载重轴中点。
2.3 转弯模型
如图4所示:线段A0B0、C0D0与y轴正方向夹角分别为αa0、αh0;牵引车的转向轮胎相对于A0B0的转角记为αZ0,且统一规定顺时针为正方向,此时为模型的初始状态。
设前部牵引车的前进速度值为v0,则在Δt时间内,A0点沿A0B0与夹角为αZ0的方向移动到A点,B0点沿线段B0A0方向移动到B1点,D0点沿C0D0方向移动到D1点。
虚线A1B1、C1D1为模型的当前位置,虚线A0A1为A0点在Δt时间内的运动轨迹。在场地实践中,该模型中的时间增量Δt的取值范围可以限定为[0.01,0.05]s。Δt取值越小,基于该模型的模拟结果精度越高,模拟时间越长;反之,模拟精度越低,模拟时间越短。
3 半挂汽车列车转弯路径算法
已知A0、B0、C0、D0的坐标以及αa0、αh0的值,设线段A0B0、B0C0、A0C0、D0C0的长度分别为La、LC、LC0和Lh,则可得到A1和B1点的坐标以及αa1值,进而可得各点运动轨迹坐标:
4 实例仿真分析
驾驶人依据实践经验操作某型半挂车,用二档起步,以10km/h低速行驶,进入如图1所示左直角转弯环境区域,先使右侧车轮靠近道路边线保持约0.1m的横向间距正直行驶,当行驶至驾驶员左侧即将与内直角线l平齐时(车辆前端与l线垂直距离约为4m,此时迅速向左转动转向盘至极限位置;从后视镜观察,当后部半挂车第一轴接近突起点距离约为2~3m时,稍许向右打回方向,保持车辆靠近道路外侧边线行驶,车辆顺利通过直角弯道。
为仿真上述操作规程效果,根据给定的环境参数及半挂车机组各部位长度参数,在Matlab中仿真的效果图5,其中红色曲线表示牵引车转向桥中点A的运动轨迹。
图4表明,仿真曲线与实车试验操作相符合,在变化趋势及数值精度上保持了一致,行进过程车辆轮廓线与周围环境障碍无交点,表明车辆实现了无碰轧转弯且无越线现象,满足直角转弯要求,表明驾驶人按上述实践经验操作具有一定的规范性。
5 结语
本文路径算法能够真实反映半挂车机组直角转弯避障要求,说明模型及算法具有一定的适用性、可靠性,为直角转弯操控行为由经验型向数字化、精准化转变提供理论参考。因车型及场地环境单一,实证研究还不够完整和充分,数字化模型的针对性、适用性还需进一步拓展。
参 考 文 献
[1] 周志宏,张中举.大型特种车辆驾驶课程教学设计浅谈[J].卷宗,2016(1)198.
[2] 李明剑,段绪斌,高立鑫.港口大型车辆制动和转弯特性研究[J].科技研究,2012(10):161.
[3] 郭孔辉.驾驶员—汽车闭环系统操纵运动的预瞄最优曲率模型[J].汽车工程,1984(3):1-16.
[4] 王凌.智能优化算法及其应用[M].北京:清华大学出版社,2001:32-45.
[5] 孙扬.全挂汽车列车的操纵稳定性及其控制[D].南京林业大学,2015.
[6] 张中举,黄荣贵.重装备运输车驾驶员教材[M].解放军出版社,2014(12):295.
猜你喜欢
科学与财富(2016年18期)2016-12-22
中小企业管理与科技·下旬刊(2016年10期)2016-11-18
科技视界(2016年15期)2016-06-30
科技视界(2016年8期)2016-04-05
科技视界(2016年7期)2016-04-01
中国市场(2016年8期)2016-03-07
物联网技术(2015年8期)2015-09-14
光学仪器(2015年1期)2015-07-30