
皮划艇运动关键角度检测与分析
2024-06-29 07:09:09杨耿程晖黄惠怡李钦郑家帆郑永权
当代体育科技 2024年13期
关键词:人工智能技术
杨耿 程晖 黄惠怡 李钦 郑家帆 郑永权

摘 要 本文通过应用人工智能技术,对皮划艇运动过程进行人体关键点识别和角度计算分析。论文从人工智能技术的现状、皮划艇运动智能应用业务流程、运动智能应用方式、皮划艇运动过程分析、皮划艇运动关键角度计算推导、人体关键点识别以及运动关键角度检测等多个方面详细介绍了所提出的智能识别方法。计算结果显示,所提出的方法能够在所有关键时刻有效地检测并计算出桨角和手臂关键角度,并在部分关键时刻检测到其他运动姿势角度。基于所检测的结果,通过对时间序列上多个周期的关键时刻桨角和手臂关键角度进行记录,可以进一步分析运动过程中角度的变化情况。未来,皮划艇运动员和教练可以使用本文所提出方法进行智能训练分析并记录训练数据,供该领域科学训练与决策分析使用。
关键词 人工智能技术 皮划艇运动 人体关键点识别 角度计算 训练分析
中图分类号 G861.4;TP391.77 文献标志码 A
Detection and analysis of critical angles in kayaking sport
Abstract This study applies artificial intelligence techniques to recognize human body key points and analyze angle calculations in the process of kayaking. The paper provides a detailed description of the proposed intelligent recognition method, covering the current state of artificial intelligence technology, the business workflow of intelligent kayaking applications, methods of intelligent application, analysis of kayaking processes, derivation of key angle calculations in kayaking, recognition of key human points, and detection of key angles in kayaking. The computed results indicate that the proposed approach can effectively detect and calculate paddle angles and key arm angles at all significant moments, as well as detect other motion pose angles at specific moments. By recording the paddle angles and key arm angles at significant moments across multiple cycles on a time sequence, it can further analyze angle changes during the motion. In the future, kayakers and coaches can use this proposed method for intelligent training analysis and record training data for scientific training and decision analysis in the field.
Keywords Artificial intelligence technology Kayaking Human body key point recognition Angle calculation Training analysis
引言
皮划艇运动一直是我国参与国际竞赛的重要项目之一,近年来在该领域取得了显著的成就。目前,对皮划艇运动的研究主要集中在体能训练方法、运动防损伤、生化指标分析和过程性分析等方面。然而,目前的过程性分析方法往往依赖于人工方式,缺乏科学且直观的分析工具来评估运动中的关键角度。现有的穿戴式传感器在过程性分析中存在一些局限性,穿戴设备在一定程度上影响了运动员训练动作的自然性。随着人工智能技术的迅速发展,越来越多的领域开始应用人工智能技术来提高工作效率和解决问题。通过利用人工智能技术,尤其是机器视觉识别技术,能够实现对皮划艇运动动作的自动识别,并对运动过程进行分析,为运动员和教练员提供更加有效的训练分析工具。这种智能化的分析工具将使得训练过程更加科学化和精确化,从而提高运动员的训练效果和竞技水平。本文旨在介绍一种基于人工智能机器视觉识别的皮划艇运动关键角度智能识别方法,并提供普适性的动作识别和过程性分析的视觉识别工具。通过运用机器视觉识别技术,本研究可以自动识别皮划艇运动动作的关键角度,并对运动过程进行分析。本文的研究成果对于提升运动员的训练效果和竞技水平具有积极的意义。
人工智能关键技术
深度学习
近年来,深度学习作为机器学习的重要分支,在语音识别、图像识别、自动驾驶等领域得到了广泛应用。深度学习技术的发展可以划分为技术研究和框架研究两个方面。在技术研究方面[1]:感知机于1958年问世,成功应用于解决二分类问题;在1982年至1986年之间,循环神经网络(RNN)的引入使得序列数据能够被处理;1998年,LeNet-5的提出实现了文档识别的突破,同时长短期记忆(LSTM)的问世推动了自然语言处理的发展;2015年,经典的残差网络结构(ResNet)的出现有效地解决了梯度下降和网络退化问题。在框架研究方面[2]:2008年,蒙特利尔大学提出了Theano框架;2013年,伯克利大学提出了Caffe框架,该框架因其高性能和简洁明了的特点而广泛使用;2015年,谷歌公司提出了TensorFlow框架,具有平台兼容性强和完善的资源和生态系统等优点;2017年,Facebook人工智能研究院提出了PyTorch框架,它具有高灵活性、高速度和易用性等优点;2018年,百度公司提出了飞桨(PaddlePaddle)框架,它易于使用,支持分布式训练,并且非常适应国内硬件;2019年,华为公司提出了MindSpore框架,它提供全场景支持,并采用一致的动态和静态图设计。这些框架的出现对于深度学习领域的发展具有重要的推动作用。
姿态估计
深度学习在人体姿态估计方面得到了广泛应用,特别是在动作识别、自动驾驶辅助系统和动画游戏等领域。人体姿态估计可分为二维和三维两种形式。在二维人体姿态估计中,存在多种方法[3-5]:基于数值坐标回归的方法,通过训练深度神经网络直接从图像中回归出人体关键点的坐标;是基于关键点热图回归的方法,利用人体关键点之间的结构关系,结合机器学习算法对预测结果进行优化;是基于卷积姿态机的方法,利用连续预测和大感受野来实现准确的结果;基于堆叠沙漏网络的方法,通过在每个尺度上捕获信息,并利用不同尺度进行姿态估计;基于从多人姿态的自顶向下方法,通过改进人体边界框或区域定位的方式来提高人体姿态估计的准确性;基于多人姿态的自底向上方法进行关节点检测,将检测到的节点进行聚类以获得多个人体的姿态估计。以上这些方法为深度学习在人体姿态估计领域的研究提供了不同的思路和技术,对其进一步的应用和发展具有重要意义。
三维人体姿态估计是在二维人体姿态估计的基础上引入深度信息来实现更准确的结果。在三维人体姿态估计中,存在多种方法[6]:基于端到端的人体姿态估计法,该方法利用卷积神经网络对图像进行回归特征提取,从而能够预测出人体关键点的三维坐标;基于重建法,该方法在第一阶段使用二维姿态估计,然后将二维关键点升级为三维关键点以实现姿态估计;基于多人场景下单目的自顶向下方法,该方法先确定人体边界框,然后通过边界框得到人体关节点的位置;基于多人场景下单目的自顶向上方法,该方法首先预测所有关节点的位置,然后根据这些关节点之间的相关关系进行连接。以上这些方法为实现三维人体姿态估计提供了不同的途径和策略,对于进一步提高人体姿态估计的准确性具有重要意义。
皮划艇运动关键角度智能识别应用设计
智能识别应用业务流程
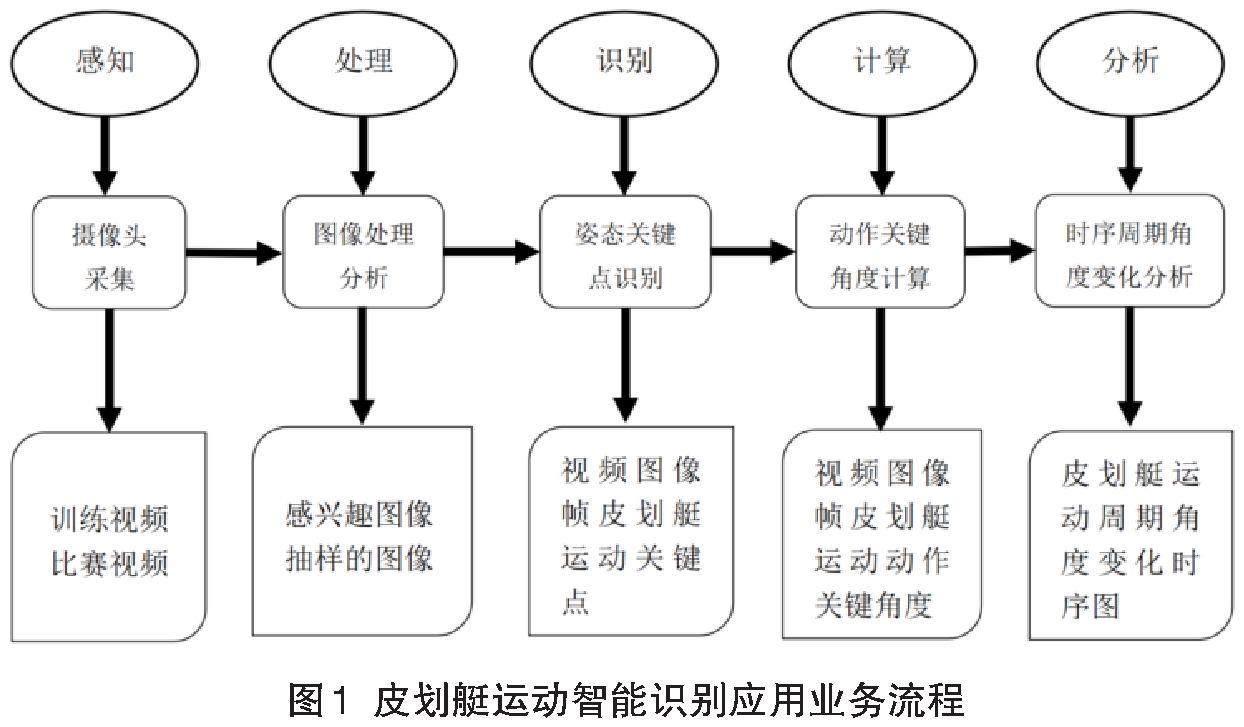
为实现对皮划艇运动的普适性动作识别与过程性分析的目标,本研究针对皮划艇运动智能应用进行了业务流程设计。该流程包括感知、处理、识别、计算和分析五个模块,如图1所示。感知模块通过摄像头实现对视觉数据的采集;处理模块利用图像处理算法对视频数据进行抽样和预处理;识别模块则采用人工智能图像识别算法对图像中的人体姿态进行估计,并获取其关键点信息;计算模块主要使用预设的动作角度几何模型公式对皮划艇运动的关键角度进行计算;分析模块主要对计算得出的皮划艇运动关键角度在整个运动周期内的时序变化进行详细分析。通过该业务流程的设计与实施,可以提供给皮划艇运动智能应用一个普适性的动作识别与过程性分析的视觉识别工具。
为了实现对皮划艇运动的智能应用,每个模块都提供了相应的有效数据输出。例如,感知模块输出训练视频、比赛视频以及可供人工回看和分析的视频;处理模块输出感兴趣图像和抽样图像,能够快速提供某一时刻的关键图像信息;识别模块输出皮划艇运动关键点的视频图像帧,能够直观地比较运动姿势是否规范;计算模块输出皮划艇运动动作关键角度的视频图像帧,结合相应的专家规则可以自动分析动作姿势的优势和缺陷,为后续训练决策提供有效的指标依据;分析模块输出皮划艇运动周期角度变化的时序图,可以对比分析前后训练效果以及不同运动员在同一运动周期中的差异等。运动员和教练在各个模块中都可以获得来自不同维度的数据结果。这些数据输出为运动员和教练提供了全面的信息,能够支持他们进行训练和决策。通过分析这些数据,运动员可以了解自己的训练效果和改进空间,教练可以根据数据结果制定个性化的训练计划和指导方针。这种不同阶段、多维度的数据输出有助于提高皮划艇运动的智能化水平,促进运动员的技术提升和训练效果的评估。
智能识别应用方式
针对皮划艇运动关键角度智能识别应用,本文提出了四种不同的设计形态,包括滞后式、固定式、便捷式和跟随式。如图2所示,滞后式应用方式主要采用事中录像的方式进行数据采集,然后将视频拷贝到计算机中进行处理和识别分析。滞后式应用方式不需要现场处理与识别设备,对设备要求较低,适用于各种不同的场景。它的实施成本相对较低,但实时性较差。
根据图3所示,固定式应用方式主要适用于以下场景:固定室外训练赛道、固定室外比赛赛道以及室内固定训练场所。该方式通过在岸边或皮划艇室内运动器械旁架设摄像头的方式来采集数据,并通过有线宽带将视频传输到本地(边缘)智能识别计算机,包含处理、识别、计算和分析模块,从而输出分析结果。固定式应用方式需要在相应场所搭设长期稳定的固定式采集和通信设备,这涉及到场地施工和拉电等工作。为了获得皮划艇行进过程的多视角数据,需要在赛道上布设多个固定采集和通信点。因此,该方式的成本相对较高,但具有较强的实时性。通过固定式应用方式能够准确地获取皮划艇运动的关键角度信息,并进行实时处理与识别分析。这对于训练赛道、比赛赛道和室内训练场所的运动员和教练来说非常重要。尽管该方式存在一定的成本和设备安装的挑战,但它提供了高质量的角度数据和实时反馈,极大地促进了皮划艇运动的智能化发展。
根据图4所示,便携式应用方式主要适用于以下场景:临时室外训练赛道、临时室外比赛赛道以及室内临时训练场所。该方式通过支架搭建临时摄像头采集装置,通过无线信号(如WIFI、蓝牙、5G)将视频传输到小型智能识别边缘计算终端,该终端包含处理、识别、计算和分析模块,能够直接输出显示结果。在不使用的情况下,智能识别边缘计算终端(带电池)、摄像头与支架可以放置在便携式工具箱中,方便携带和安装使用。这种方式成本适中且具有较强的实时性。通过便携式应用方式,能够在临时训练和比赛场地上使用简便的设备实现数据采集和分析。该方式具有灵活性和便携性,能够满足临时训练赛道和比赛赛道的需求。同时,使用小型智能识别边缘计算终端,可以快速获取并显示皮划艇运动的相关结果,为运动员和教练提供实时反馈与指导。便携式应用方式不仅成本适中,而且操作简单,能够有效推动皮划艇运动的智能化发展。
根据图5所示,跟随式应用方式采用无人机进行皮划艇的跟随拍摄,通过5G信号将视频传输到智能识别服务器,该服务器包含处理、识别、计算和分析模块,可以将结果输出到分析平板或电脑上。跟随式应用方式无需设置多个采集点,因为无人机可以在空中跟随皮划艇行进过程进行拍摄。这种方式成本适中且具有较强的实时性。通过使用智能识别服务器,可以对皮划艇运动进行高效处理与分析,并将结果直接显示在分析平板或电脑上。采用跟随式应用方式,可以充分利用无人机技术实现皮划艇运动的全方位拍摄与监控。无人机的灵活性和高机动性使其能够跟随皮划艇在水上进行拍摄,获取多角度的图像和视频数据。通过5G信号传输,视频可以实时传输到智能识别服务器进行处理和分析。这种方式不仅具有成本适中和实时性强的特点,而且可以提供高质量的视角数据,为运动员和教练提供准确的信息支持。采用无人机跟随式应用方式,可以进一步提升皮划艇运动的数据采集和分析水平,为训练和比赛提供更准确、全面的信息参考,推动皮划艇运动技术的发展。
本节通过总结四种方式在应用场景、室内外适用性、通信方式、计算方式、成本与实时性方面的差异,为实际应用提供了指导。根据表1,可以看出不同的应用方式在不同方面具有明显的差异。在应用场景方面,便携式应用方式主要适用于临时场所的训练和比赛,而跟随式应用方式适用于需要全方位监控的情况。在室内外适用性方面,便携式和固定式应用方式更适合室内使用,而无人机和固定式应用方式则适用于室外环境。在通信方式方面,便携式和固定式应用方式可以使用无线信号进行数据传输,而无人机应用方式则采用了更先进的5G通信技术。计算方式方面,便携式和固定式应用方式在小型智能边缘计算终端上进行处理与分析,而无人机应用方式则通过智能识别服务器进行计算。在成本与实时性方面,便携式应用方式成本适中且具有较强的实时性,而无人机应用方式则具有更高的成本和实时性。根据实际情况,可以选择不同的应用方式以满足需求。综上所述,通过对四种应用方式在不同方面的差异进行总结与比较,可以根据实际情况选择最适合的应用方式,以提高皮划艇运动数据采集和分析的效果。
皮划艇运动关键角度分析与建模
划桨动作过程分析
为了实现皮划艇应用中的关键角度检测与分析,需要对划桨动作进行初步分析。皮划艇运动是一项周期性的、非对称发力的划桨运动,具有高强度、高速度、高技术等特点。划桨过程中,桨与桨之间存在密切的联系,上一阶段桨插入的速度、力度和角度会直接影响下一阶段的动作,只有当每个阶段的技术达到一定标准,才能在比赛中取得优异成绩。为了方便研究,可以根据动作意义划分法将划桨周期进行划分。参考文献[7]的研究,本文将单个划桨周期分为抓水阶段、拉水阶段、回桨前段和回桨后段。抓水阶段是指桨尖插入水中并逐渐变为桨叶垂直的过程;拉水阶段是指桨叶垂直并逐渐离开水面的过程;回桨前段是指桨尖离开水面并与船沿平行的过程;回桨后段是指桨杆与船沿平行并桨叶再次进入水中的过程。皮划艇可分为皮艇和划艇两种类型,皮艇技术以上肢为主,下肢为辅;而划艇技术则以下肢为主,上肢为辅。在划桨过程中,要求运动员肩、肘、腕、髋、膝、踝等关节与肌肉高度协调。因此,本研究根据不同的运动阶段结合历史研究成果[8-9],确定了相应的人体关键运动部位。
本文重点关注划桨过程中的三个阶段:抓水阶段、拉水阶段和回桨阶段。在抓水阶段,运动员主要依靠上肢力量带动躯干旋转,并通过双膝的弯曲与伸直、手臂与划桨的协调完成划桨动作。在此阶段,桨叶与水面形成的夹角在30-45度之间较为合适,运动员需要迅速插桨,将桨的势能迅速转化为动能,以产生前进的动力。插桨后,运动员需要快速调动身体各个部位的肌力,通过蹬腿、髋部和上肢等部位的发力来稳定桨在水中的支撑点,并推动皮划艇前进。在拉水阶段,运动员利用肘关节的屈伸来拉桨,并通过下半身的扭转增加力量输出。同时,需要控制划桨的有效垂直位置,最佳的角度为桨叶呈90度,这表示桨叶与水的相互作用最大,速度达到最佳。在桨叶出水时,桨杆与水面形成的角度应约为135度,这是较为合适的位置。出水动作应干净利落,尽量减小水花的产生,以避免降低划水频率和延长划桨周期,从而有利于下一阶段的入水操作。回桨阶段包括回桨前段和回桨后段。在回桨复位时,运动员需要放松手臂,并利用躯干的旋转带动桨叶向前移动。同时,需与腿部积极配合,以缩短回桨时间,减少水的阻力,提高划水的效率和速度。这样可以保证划水动作的连贯性和流畅性,并为下一阶段的入水做好准备。
动作角度几何建模
本文采用了Mediapipe工具库,其中包含了姿态估计与识别模型。该工具库可提供32个人体关键点的定位,包括人脸关键点。图6展示了这些关键点的布置。
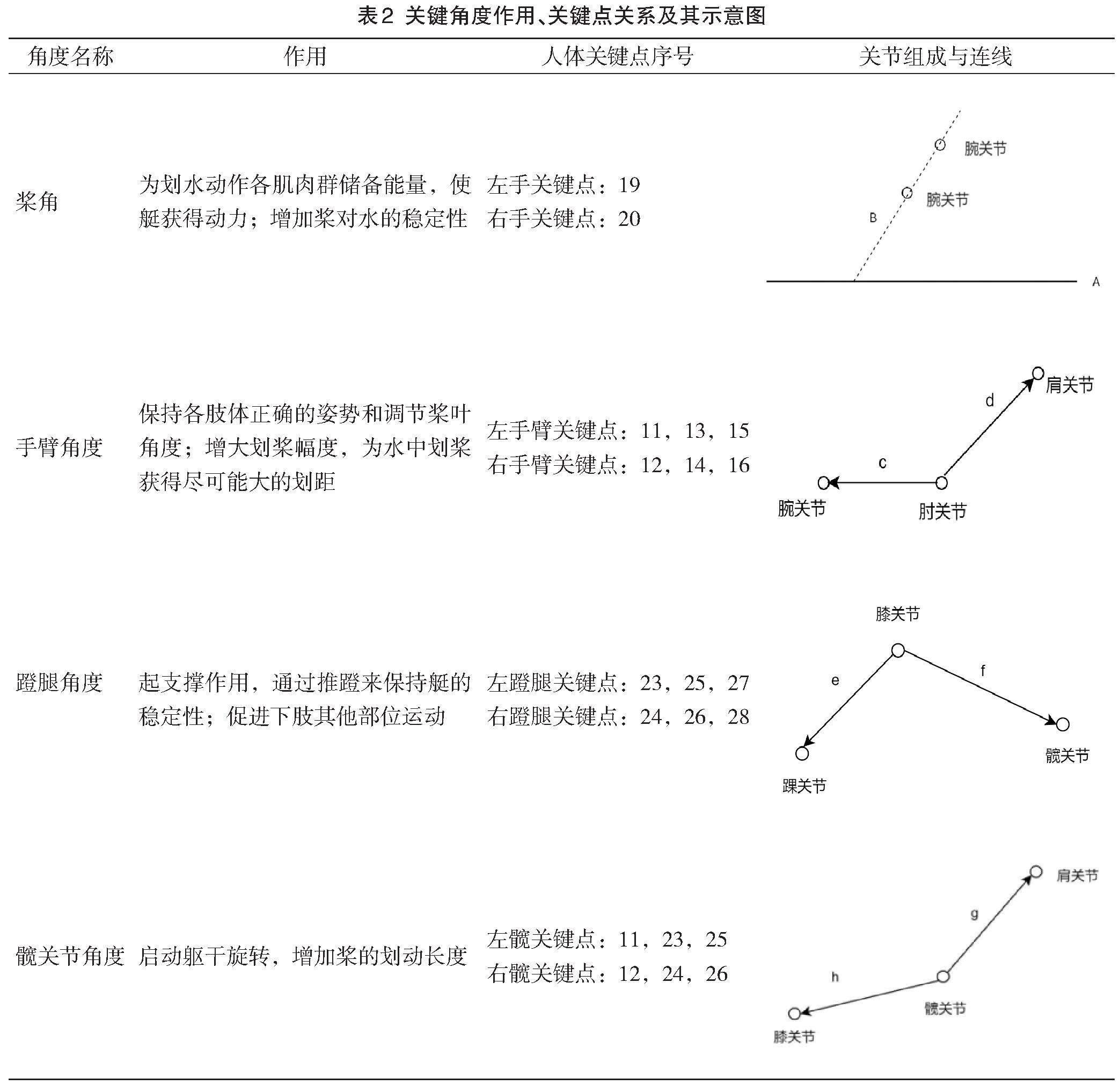
左手的关节点对应人体关键点中的序号19,右手关节点对应序号20。手臂角度是以肘关节为中心,通过连接肩、肘和腕三个关节点而形成的角度。在左手臂中,肩、肘和腕关节点对应人体关键点中的序号11、13和15,而在右手臂中则对应序号12、14和16。蹬腿角度是以膝关节为中心,通过连接髋、膝和踝三个关节点而形成的角度。在左蹬腿中,髋、膝和踝关节点对应人体关键点中的序号23、25和27,而在右蹬腿中则对应序号24、26和28。髋关节角度是以髋关节为中心,通过连接肩、髋和膝三个关节点而形成的角度。在左髋关节角度中,肩、髋和膝关节点对应人体关键点中的序号11、23和25,而在右髋关节角度中则对应序号12、24和26。表2详细描述了关键角度与人体关键点之间的关系及其作用。
桨角计算
根据划桨动作过程分析结果显示,桨角是皮划艇运动中最重要的关键角度,即指桨与水平面之间形成的夹角。目前,在人工智能技术中还没有直接检测桨角的算法模型。如果要通过识别物体中的桨来检测桨角,就需要收集大量的图像样本,并进行标注以进行检测。这样的过程非常耗费时间和精力,并且无法保证获得良好的效果。因此,本研究采用了一种巧妙的方法,利用成熟的姿态估计算法来获取人体的关键点信息,从而确定桨杆的相对位置。
本研究在采集的视频帧图像中,以左上方顶点为原点,水平面为X轴,与水平方向垂直的方向为Y轴,建立了一个二维直角坐标系。根据已知信息,设定皮划艇底部与水面相接的线为A,并将其表示为公式(1)。
(1)
将左手关键点和右手关键点的二维坐标分别表示为与,并将这两个点连线的直线称为B,直线B的表达式如公式(2)所示。
(2)
直线B的斜率可用公式(3)表示。
在所建立的二维坐标系下,通过应用反正切函数来计算桨角,其计算公式如公式(4)中所示。其中,表示直线B的斜率,代表了桨与水面之间形成的夹角,即桨角。
(4)
通过将式(1)与式(3)代入式(4),得到计算桨角的最终结果如公式(5)所示。
本研究将通过连接三个关节点计算得出的角度称为关节角,其中包括手臂角度、蹬腿角度和髋关节角度。这些关节角可以利用两个关节点连线的向量内积公式进行计算。在建立的二维坐标系下,可以通过向量内积公式(6)进行角度计算。
在本研究中,假设关节点a、中心关节点和关节点b的二维坐标为与,则向量a与b可以分别表示为公式(8)与(9)。
在本研究中,定义了关节与关节之间的长度为向量的模。具体地,在公式(10)和(11)中给出了关节长度的计算方式。公式(10)表示了关节点a与中心关节点之间的长度,而公式(11)则表示了中心关节点与关节点b之间的长度。通过这样的定义和计算方式,可以准确地确定关节之间的长度。
通过将公式(8)至(11)代入公式(7),可得到最终的关节角计算结果,如公式(12)所示。该公式提供了准确计算关节角的方法,并可用于进一步研究和分析相关问题。
实现过程
本文采用了Mediapipe工具库来进行人体关键点的识别。在进行人体关键点识别之前,需要对摄像头实时捕获的皮划艇运动或从计算机上读取的皮划艇运动视频进行处理。为此,本文选择了OpenCV视觉库来读取和处理皮划艇运动视频,该库提供了图像的基本操作、图像信号处理以及机器视觉等多种功能, 能够有效地获取皮划艇运动视频的帧并进行必要的预处理。这一过程的主要实现如图7所示,其中包括视频读取、帧处理和相关图像操作。通过以上实现步骤,能够获得适合于后续人体关键点识别的皮划艇运动视频数据,并为后续研究提供了可靠的数据基础。
首先,视频图像帧格式默认为BGR,需要将其转换为RGB格式以满足模型输入要求。其次,采用了多种策略来改善人体姿态检测的准确性和稳定性。例如,将Mediapipe姿态估计与识别模型处理模式设置为视频流模式,利用前后帧的信息来提高姿态检测结果;调整人体姿态关键点检测模型的复杂度,提升关键点位置的精确度;采用平滑关键点处理方法降低图像中的噪声,增强图像质量;设定检测关键点置信度阈值,过滤掉置信度较低的预测关键点,提高关键点检测准确性;设置最小跟踪置信度阈值来跟踪达到该阈值的目标,确保检测的稳定性。详细的Mediapipe姿态估计与识别模型处理模式参数设置如表3所示。通过合理配置这些预处理策略和参数,能够获得更加清晰、稳定、连贯且准确的视频图像。
经过处理后获取的关键点包括x、y和z三个三维坐标参数,但由于假设场景为二维,因此只使用x和y作为关键点坐标信息。此外,可设置visibility参数,用于表示关键点的可见程度,取值范围为0到1,数值越大表示可见程度越高。在实际应用中,由于可能存在关键点被遮挡等情况,为了提高计算的准确性、稳定性和可靠性,需要对关键点进行质量检测。本文设置了一个可见性阈值,只有当所需计算角度所涉及的关键点数量及其可见性值都达到阈值时,才进行角度计算。例如,对左臂角度的计算,首先进行关键点质量检测,只有当左肩、左肘和左腕三个关键点的可见性值都达到预设阈值(0.7)时,才执行下一步的计算操作,否则将视为无法获得可靠的关键点用于角度计算。在获得高质量的关键点坐标后,可以利用角度计算公式和关节角计算公式进行角度计算。最后,按照时间顺序将计算得到的角度结果写入CSV文件,以便进行后续的时间序列上的角度变化分析。
结果分析
划桨过程人体关键点识别结果
如图9所示为划桨过程中人体关键点的识别结果。在划桨过程中的识别结果,可观察到如下现象:当桨右入水时,左手腕位置较为靠近头部,导致头部遮挡了关键点,从而无法被模型检测到;桨处于右垂直位时,左手臂和腿部的关键点均未能被正确检测到;桨右出水时,由于肢体伸展,上肢两侧的关键点能够较好地被识别,然而腿部关节仍然无法被检测到;桨左入水时,左右手臂及右腿的关键点能够较好地被识别到;桨位于左垂直位时,左手肘关节和腿部的关键点无法被准确识别;桨左出水时,右侧关键点能够被较好地识别,但左侧关节由于被身体遮挡而无法被识别。从总体上观察,划桨过程中的右侧肩部、髋部、肘部和腕部等关键点能够较为准确地进行识别。这是因为摄像机位于运动员的右侧,导致右侧的肢体能够被清晰地记录下来。然而,左侧的关键点由于在划桨过程中受到身体其他部位的遮挡,无法完整地被识别。此外,腿部的膝关节和踝关节在整个过程中都受到严重的遮挡,因此识别效果较差。虽然在关键点识别过程中,模型可以根据已有的33个拓扑关键点对未识别的关键点进行预测和拓展,但在复杂多变的背景下,模型的预测能力会受到数据质量的限制,以及拓扑关键点之间相互影响和约束的影响,因此比较难以准确地识别和预测。
尽管存在以上问题,根据本文所提出的角度计算公式,针对图8中的图像数据,仍可以准确计算出右手臂角度和桨角。这两个角度结果将稳定地支持周期性运动过程分析。同时,在部分图像中,还可以计算出左手臂角度、蹬腿角度和髋关节角度。
划桨动作关键角度计算结果分析
以右入水到左出水作为一个周期,其中包括右入水、右垂直、右出水、左入水、左垂直和左出水六个关键时间点。本研究选择了一段皮艇划桨的视频,该视频包含三个完整周期。本文选择了能稳定计算的右手臂角度和桨角来进行周期性分析。按照这六个关键时间点的时间顺序,对三个周期内的右手臂角度和桨角进行排序,并绘制成散点折线图,如图9所示。
通过观察图9,可以得出手臂角度和桨角呈现一定的规律性变化。在桨角方面,可以看到以下规律:首先,在桨入水时,三个周期内的左右入水时的桨角大约在60度左右(误差不超过10°),且右入水时的桨角大于左入水时的桨角;其次,当桨叶位于垂直位置时,桨角大约为90度;最后,在桨出水时,桨角变化范围在130度至160度之间,且右出水时的桨角明显大于左出水时的桨角。此外,左右出水时的桨角随着时间推移都呈现轻微递增的趋势。
在右手臂角度方面,可以得出以下结论:对于桨入水时,左入水时刻的右手臂角度约为115度,而右入水时刻的右手臂角度约为145度,且右入水时刻的右手臂角度明显大于左入水时刻的右手臂角度。在桨叶位于垂直位置时,桨叶左垂直位和右垂直位的右手臂角度都在140度左右,总体上该位置的右手臂角度呈略微递增趋势。在桨出水时,右出水时刻的右手臂角度约为145度,而左出水时刻的右手臂角度幅度变化较大。
右手臂角度和桨角之间存在内在联系。在抓水阶段,从时序图可以观察到,桨角随着右手臂角度的增大而增大,表现出正相关关系。而在拉桨和回桨阶段,从时序图可以观察到,桨角随着手臂角度的增大而减小,表现出负相关关系。图9中三个周期内关键时刻点说明如表4所示。
总结与展望
本文旨在响应新时代体育工作中对体育强国目标的要求,从信息化和智慧化角度出发,针对特定的体育运动场景——皮划艇运动过程进行了智能应用的设计与实现。通过采用人工智能技术,本文成功完成了皮划艇运动关键角度的检测与分析任务,并实现了一系列任务,包括人体关键点检测、关键角度建模与计算以及关键角度初步时序分析。这些技术与实验成果未来有望进一步应用于辅助训练工具产品的开发,为皮划艇运动员与教练提供训练分析数据和决策支持。为进一步推动该领域的应用研究,未来的工作可以着重在以下方向展开:首先,提升关键点检测的成功率,以提高系统的准确性和可靠性;其次,对于3D模型下的检测计算进行改进,以更全面地捕捉和分析皮划艇运动员的动作特征;此外,针对时间序列分析运动员的训练与比赛效果也是一个有价值的研究方向,通过比较不同训练阶段和不同运动选手之间的关键角度差异,可以深入了解训练对运动员表现的影响。这些工作的开展将为皮划艇运动领域的应用研究提供更好的支持,为提高训练效果和培养优秀的运动员做出贡献。同时,本研究也为其他体育项目的智能化应用提供了启示和借鉴。
参考文献
[1]陆明亮.深度学习技术的发展及应用[J].电子技术,2023,52(02):322-324.
[2]唐晓彬,沈童.深度学习框架发展综述[J].调研世界,2023,No.355(04):83-88.
[3]张宇,温光照,米思娅等.基于深度学习的二维人体姿态估计综述[J].软件学报,2022,33(11):4173-4191.
[4]曹晓瑜,夏端峰.基于深度学习的人体姿态估计方法综述[J].现代信息科技,2022,6(23):1-6.
[5]马双双,王佳,曹少中等.基于深度学习的二维人体姿态估计算法综述[J].计算机系统应用,2022,31(10):36-43.
[6]胡佳琪,王成军,杨超宇.基于深度学习的3D人体姿态估计研究综述[J].现代信息科技,2023,7(04):117-120+124.
[7]裘艺,魏文仪,刘爱杰等.国际大赛中男女皮艇运动员划桨节奏的比较研究[J].上海体育学院学报,2005(03):54-59.
[8]黄振东,刘磊,陈黎等.上肢划桨技术在无宽度限制皮艇运动中的作用[J].四川体育科学,2009,No.128(04):82-83+138.
[9]裘艺,程其练,王兆征等.皮艇划桨技术优劣的运动学评判方法和应用研究[J].西安体育学院学报,2013,30(05):628-635.
猜你喜欢
科技资讯(2016年36期)2017-04-21 07:49:08
卷宗(2016年12期)2017-04-19 21:04:44
中国新技术新产品(2017年9期)2017-04-13 08:21:05
企业文化·下旬刊(2017年2期)2017-04-01 11:04:28
电子技术与软件工程(2017年3期)2017-03-22 02:22:36
考试周刊(2016年29期)2016-05-28 09:54:07
科技视界(2016年10期)2016-04-26 11:31:20
中国科技博览(2016年7期)2016-04-25 06:29:14
科技传播(2015年24期)2016-03-09 23:34:57
科技与创新(2015年20期)2015-10-29 23:50:07
