基于YOLOX-L-TN 模型的番茄果实识别
2024-06-28 21:30李名博刘玉乐穆志民郭俊旺卫勇任东悦贾济深卫泽中栗宇红
中国农业科技导报 2024年4期
关键词:注意力机制
李名博 刘玉乐 穆志民 郭俊旺 卫勇 任东悦 贾济深 卫泽中 栗宇红
摘要:针对植物工厂对番茄采摘作业的智能化需求,为克服在采摘作业过程中因番茄果实大小不一、遮挡重叠造成的识别精度不高和速度不快的问题,提出了YOLOX-L的改进型目标识别模型YOLOX-L-TN。该模型依据特征图的通道和空间注意力机制的内部结构和原理,设计了含有残差结构的TN模块,并融入到YOLOX-L的主干网络中,在保持网络轻量化的同时,实现模型识别速度和精度的同时提升。与YOLOX-L相比,YOLOXL-TN的AP值提高了4.81个百分点,单张图像的识别时间提升了0.141 7 s,TN模块的最佳位置为输入端与主干网络之间。进一步将TN模块与类似模块SENet、CAM、CBAM和CAM进行对比,AP值分别提高0.53、4.19、6.12、6.34 个百分点,单张图像识别时间分别提升0.019 1、0.025 0、0.021 1、0.018 9 s。由此可见,提出的YOLOX-L-TN模型具有精度高、识别速度快、鲁棒性高等优点,可为番茄后期的智能采摘提供技术支持。
关键词:番茄识别;注意力机制;TN模块;YOLOX-L
doi:10.13304/j.nykjdb.2023.0570
中图分类号:S225 文献标志码:A 文章编号:10080864(2024)04009709
番茄作为重要的蔬菜被广泛种植,全球每年的总产量达1.7亿t,在蔬菜作物中常居于首位,我国是番茄生产大国,新鲜番茄的产量稳居世界首位,加工番茄的产量位于世界前列[1]。近年来,植物工厂为作物提供了精心设计的种植环境,随着植物工厂种植模式的探索和发展,番茄实现高效生产,先进的种植技术和高度规范智能化的管理模式确保“无激素”和“零催熟”,极大提升了番茄的产量和品质[2]。在番茄生产和销售的整条产业链中,采摘环节仍以人工为主,工作效率低且用工成本高。智能采摘机器人作为一种新型采摘方式应运而生,如Kondo等[3]研发的SCARA 机械臂番茄采摘机器人,Xie等[4]基于深度相机与SLAM导航技术研发的具有自主规划路径的采摘机器人。在植物工厂中,采摘机器人可以通过图像识别等先进技术实现自动识别和自动采摘,大大提高番茄采摘的效率[5]。但是现有番茄采摘机器人的识别率和采摘率容易受光照及环境因素的影响,限制了其在植物工厂中的广泛应用。为了提高番茄采摘机器人在植物工厂中的应用效果,需要对番茄的目标识别算法、图像处理技术等进行改进,从而实现更加快速、准确的识别。
随着计算机科学的进步,在目标识别效率和准确性方面拥有巨大优势的深度学习技术已经被广泛应用于农业生产中,主要包括病虫害识别、果实修剪点以及果实识别等[6]。基于深度学习的目标识别算法主要分为2种:一种是一阶段目标识别方法,不产生候选框,将目标边框定位的问题转化为回归问题处理,直接对预测的目标物体进行回归[7],识别速度快,代表算法包括YOLO(youonly look once)、SSD(single shot multibox detector)等;另一种是两阶段目标识别方法,生成候选框,通过对候选区域的分类进行识别,代表算法包括Faster R-CNN(convolutional neural networks)、Mask R-CNN等。张境锋等[8]提出一种Des-YOLO网络结构,实现了适宜采摘的苹果目标识别。张俊宁等[9]利用卷积注意力模块改进YOLOv5s的骨干网络,番茄识别准确率提升了1.5个百分点。Zeng等[10]利用MobileNetv3的bneck模块对YOLOv5的主干网络进行重建,番茄识别精度提升了0.7个百分点。Qi 等[11]在YOLOv5 的主干网络中添加SE注意力机制模块,番茄病毒的识别准确率提升了1.78个百分点。张立杰等[12]使用深度可分离卷积模块替换原SSD网络主干特征提取网络中部分标准卷积,苹果识别准确率比Faster R-CNN提升了1.33 个百分点。毛锐等[13] 构建了一种改进的Faster-RCNN 的小麦病害识别方法,识别精度提升了14.97个百分点。梁喜凤等[14]将Mask R-CNN主干网络替换为MobileNetv3-Large,番茄侧枝修剪点的识别率提升了3.3个百分点。
针对番茄果实目标的识别问题,许多学者也进行了相关研究。Liu 等[15] 在YOLOv3 中加入DCCN(distributed CNN)结构,并采用圆形边界框代替矩形框对番茄进行识别,这种方法对偏圆形、个头大一些的番茄识别效果比较好,并不适用于一般形状个头小的番茄。龙洁花等[16]利用跨阶段局部网络对Mask R-CNN 进行改进,提升了番茄的识别率,但当光照较弱、遮挡严重时准确率会下降。Afonso 等[17]用Mask R-CNN 模型对没有遮挡的番茄果实进行识别,尽管试验效果比较好,但没有考虑果实遮挡和重叠等因素。目前的识别算法并没有充分考虑番茄大小、光照条件、存在遮挡和重叠等情况,而植物工厂中番茄果实大小不一、生长稀疏程度分布不同,而且叶片、果柄和枝干等对果实存在遮挡现象,上述识别方法对于植物工厂中的番茄并不适用。现阶段已在其他作物上针对遮挡开展大量研究,但由于先前技术的限制,对作物遮挡特征的提取不够充分,识别效果不是很好,存在漏检、重检、错检等现象,但对于采摘任务而言,存在遮挡现象的果实要求较高的识别准确率。对比一阶段和两阶段目标识别方法,两阶段识别方法先生成候选框,再进行分类进行识别,虽然可以提高识别精度,但模型的识别速度受到限制,为进一步提高工作效率,更加适合采用一阶段识别方法。YOLOX-L作为一阶段识别方法中的经典模型,主干网络(CSPDarknet)中加入Focus和Spp结构,在原始信息丢失较少的情况下提高识别速度。
针对以上问题,本文选择YOLOX-L作为基础模型,设计了一种含有残差网络结构的TN模块,可以更多地保留图像的原始信息,更加充分地提取遮挡的番茄信息。将TN模块融合到YOLOX-L模型当中,分析了TN模块融合在模型的不同位置对识别性能的影响,并与SENet、CAM、CBAM 和CAM 模块训练结果进行对比,充分验证了YOLOX-L-TN模型的优越性,实现了番茄果实识别精度和速度的同时提升,为番茄的智能采摘提供技术支持。
1 材料与方法
1.1 数据集
本研究的数据集来源于PlantVillage 公共数据集[18],该数据集中包含895幅不同时间段、遮挡度不同的番茄RGB 图像,通过数据扩充获得3 580幅番茄图像,按照8∶1∶1的比例进行划分,随机选择2 864幅图像作为训练集,358幅图像作为验证集,358 幅图像作为测试集。使用Matlab的Image Labeler软件对番茄数据集进行标注,标注文件的存储格式为mat,在Matlab 命令行窗口通过load命令加载mat文件,工作区出现标注信息的变量,对应895×2 的table,table 的第一列为imageFilename,即标注图像所在位置的绝对路径,第二列为n×4 double,其中n 代表每幅图像中番茄的个数,4代表定义标注框所需的4个参数,即标注框左上角的横、纵坐标以及框的宽度和高度。
由于原始数据集数量较少,为了增加训练样本的数量和多样性、减少模型的训练时间、提高模型的鲁棒性和泛化能力,采用数据增强的方式对数据集进行扩充。利用Matlab的深度学习工具箱对图像对比度变换(Contrast)、色调变换(Hue)、饱和度变换(Saturation)、亮度变换(Brightness)、噪声扰动(Noise)、翻转变换(Flip)、尺度变换(Scale)等随机混合增强。增强图像的同时,标注信息也进行相应的变换,大大提高了图像标注工作的效率。对数据集图像进行翻转变换及尺度变换,增强图像的多样性。选择合适的对比度、色调、饱和度、亮度变化范围,模拟不同光照下番茄的生长情况,最后添加噪声扰动,提高模型的抗干扰能力[19]。
1.2 改进型YOLOX-L 模型
1.2.1 YOLOX-L 模型
为了满足番茄目标识别的实时性和准确性,本文选择YOLOX-L作为番茄识别模型,主要分为主干网络(Backbone)、颈部网络(Neck)和预测端(Prediction),主干网络负责特征提取,颈部网络负责聚合提取的特征,预测端负责进行预测[20]。
1.2.2 TN模块
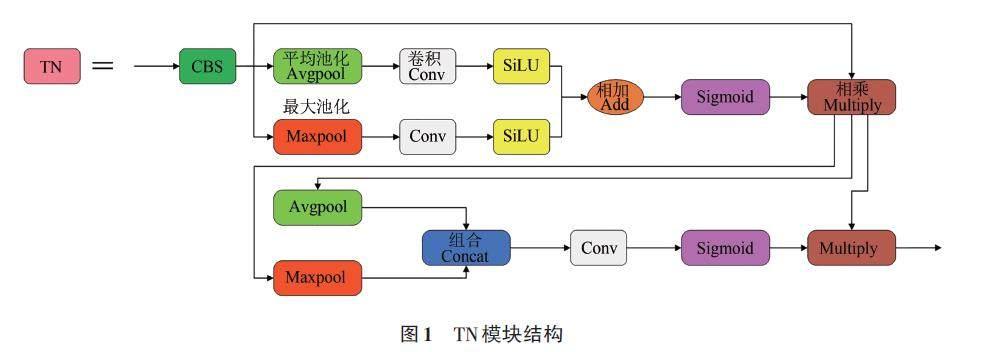
基于主流注意力机制模块的内部结构和原理,本文设计了含有残差结构的TN模块,如图1所示,对通道间传递的信息进行重点关注,提升模型识别精度和速度。TN模块采用基于宽度和高度的平均池化和最大池化操作,学习各个通道间的依赖关系并进行叠加操作,经过Sigmoid层,获得各个通道的权重,并与输入特征图做乘法操作,然后进行基于宽度和高度的平均池化和最大池化,再进行Concat 操作、卷积和Sigmoid激活操作,获得各个通道的权重,最后与输入特征图做乘法操作,得到最终的特征。
1.2.3 YOLOX-L-TN 模型及对比模型设计
YOLOX-L-TN模型将TN模块融合到YOLOX-L的主干网络中,如图2所示。输入图像在经过TN模块的过程中没有进行急剧地降维操作和丢失太多的特征信息[21],重点关注通道信息的传递,从而实现模型识别速度和精度的同步提升。
为了研究TN模块在YOLOX-L模型中的作用和效果,本文将TN模块添加在YOLOX-L模型的不同位置:主干网络与颈部网络连接的3个通道、Spp模块、颈部网络2个Upsample模块与Concat模块之间,分别表示为YOLOX-L-Connect、YOLOX-L-Spp、YOLOX-L-Upsample,将它们与YOLOX-L 及YOLOX-L-TN进行对比。同时,为了对比TN模块与其他主流相似模块的作用效果,将YOLOX-LTN模型中的TN模块替换为SENet模块、CAM模块、SAM模块、CBAM模块进行对比试验,分别表示为YOLOX-L-SENet、YOLOX-L-CAM、YOLOXL-SAM、YOLOX-L-CBAM模型。
1.2.4 特征提取
由于本文识别对象小而密集,因此采用更深层次的CSPDarknet53结构提取特征[22]。CSPDarknet53 结构是CSPDenseNet 与Darknet53 的组合,将CSPDenseNet融合到Darknet53结构当中,组成CSPDarknet53结构[23]。Darknet53分为4个部分,分别包含3、9、9和3个残差块,并且将SPP结构放在第4 个残差块内部,输入层通过CSPDarknet53的前3个部分之后,分别通过池化核为5×5,9×9,13×13的最大池化层,然后在通道方向进行拼接(Concat),再通过CSPDarknet53的第4部分,在一定程度上可以解决目标多尺度的问题,同时增加了特征提取网络的深度,提高目标识别的准确率[24]。
1.2.5 特征融合
为了更好地融合主干网络提取的特征,颈部网络采用的是FPN+PAN结构,FPN结构是自上而下的金字塔结构,增强语义信息,而PAN结构是自下而上的金字塔结构,对FPN结构进行定位信息的补充,能够使不同尺寸的特征图都包含图像语义信息和定位信息,保证了对不同尺寸的图像的准确预测[25]。
1.2.6 结果预测
网络模型的Prediction 部分用于图像结果的预测,将特征图分解为3个部分,分别为回归参数(Reg)、物体存在性(Obj)以及物体类别(Cls)。其中,Reg为确定目标物体的边界框参数,包括中心点的横纵坐标及宽度、高度尺寸;Obj用于判断特征点是否属于目标物体,结果只有2种,Obj等于1(包含物体)以及Obj等于0(不包含物体);Cls用于确定目标物体的类别,对于每个特征点,都会预测出物体类别的概率分布。对于每个特征点来说,如果被判断Obj等于1,那么根据回归参数就会计算出该物体的边界框,并根据物体类别的概率分布确定该物体的类别,这些结果和原始图像一起输出,作为模型的预测结果[26]。
1.3 环境配置
算法运行环境的硬件平台采用的处理器型号为Intel(R) Xeon(R)CPU E5-2650v4,显卡型号为NVIDIA GeForce RTX 2080Ti,内存为DDR464GB。软件平台采用Windows10 操作系统下的Matlab R2022b,在此基础上安装了ComputerVision Toolbox、Deep Learning Toolbox、GPUCoder、Matlab Coder Interface for Deep LearningLibraries等深度学习运算构架。
YOLOX-L-TN模型训练的轮数设置为80,每轮训练的batch size设置为4,学习率设置为0.000 1,惩罚阈值(penaltyThreshold)设置为0.5[27]。
1.4 评价指标
本文主要采用准确率(precision rate,P)、召回率(recall rate,R)、F1得分、AP值(average precision)、识别速度和模型大小作为指标评价模型性能。准确率代表预测为正的样本中有多少为真正的正样本;召回率代表所有正样本中有多少被预测为正样本;F1代表准确率和召回率的加权调和平均,对准确率和召回率进行综合考虑[28]; AP代表PR曲线与坐标轴所围绕图形的面积[29],AP值越高,说明模型的结果越准确。
式中,TP(true positive)代表正样本预测为正样本,FP(false positive)代表负样本预测为正样本,FN(false negative)代表正样本预测为负样本,TN(true negative)代表负样本预测为负样本。
2 结果与分析
2.1 模型训练结果分析
模型的训练结果如图3所示。可以看出,在模型训练的前1 200次迭代的过程中,损失函数迅速减少,模型快速拟合,同时,学习率迅速上升,在经过2 500次迭代后,损失函数基本稳定,整个模型趋于收敛。
2.2 YOLOX-L-TN 目标识别模型效果评价
2.2.1 模型性能评价
由图4 可知,相较于YOLOX-L模型,YOLOX-L-Spp、YOLOX-L-Upsample、YOLOX-L-TN 识别效果均有提升,但YOLOX-LTN提升的最为明显。从表1可以看出,与改进前的YOLOX-L模型相比,YOLOX-L-TN的AP值增加了4.81个百分点,预加载模型下图像识别速度提升了0.141 7 s,F1得分提高0.025 6,模型大小几乎相同。与YOLOX-L-Upsample、YOLOX-L-Spp、YOLOX-LConnect进行比较,YOLOX-L-TN的AP值分别增加了3.33、4.34、5.25个百分点,预加载模型下图像识别速度分别提升了0.127 9、0.117 9、0.203 3 s,模型减少了51.03、213.73、217.65 Mb,F1得分均高于其他模型。由识别结果可知,YOLOX-L-TN模型中的TN模块的位置为最佳位置。
2.2.2 基于TN 模块不同位置的识别效果比较
为了更直观地体现TN模块在YOLOX-L模型不同位置的作用效果,将YOLOX-L-TN 与YOLOX-LUpsample、YOLOX-L-Spp、YOLOX-L、YOLOX-L-Connect在番茄果实图像中的识别效果进行比较,结果如图5所示。可以看出,YOLOX-L模型对番茄果实的识别精度比较高,但是在枝干遮挡番茄果实的情况下存在漏检的现象;YOLOX-LUpsample没有出现漏检的现象,但存在重检的现象;YOLOX-L-Spp 存在漏检的现象;YOLOX-LConnect漏检的现象比较严重,对番茄的特征提取能力较差;YOLOX-L-TN对番茄果实的识别精度有所提升,即使存在被遮挡番茄果实,也可识别到,鲁棒性高。
2.3 基于不同注意力模块的YOLOX-L 识别模型效果比较
2.3.1 模型性能比较
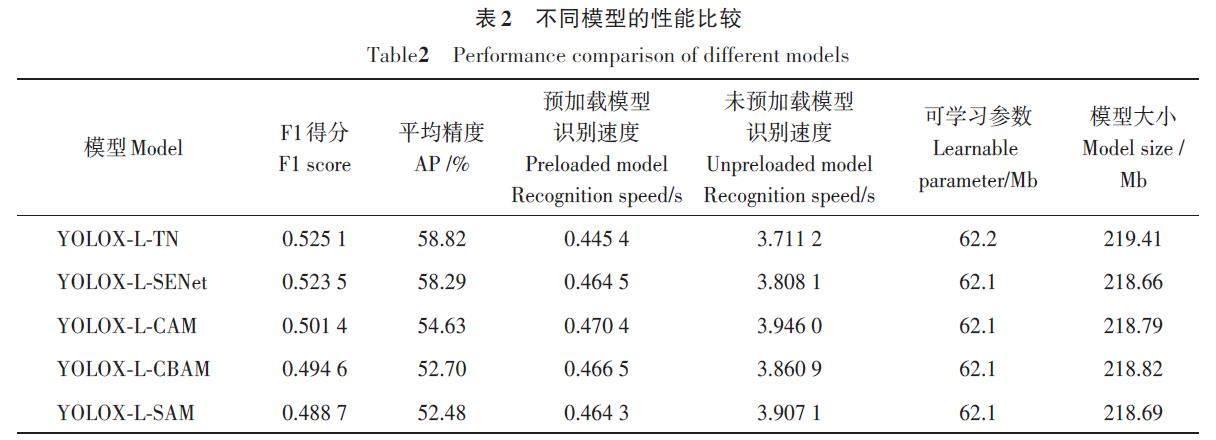
从图6可以看出,YOLOXL-TN的识别优势明显。不同模型的训练结果如表2所示,可以看出,与YOLOX-L-SENet、YOLOX-LCAM、YOLOX-L-CBAM、YOLOX-L-SAM 相比,YOLOX-L-TN 的AP 值分别增加了0.53、4.19、6.12、6.34个百分点,预加载模型下图像识别速度分别提升了0.019 1、0.025 0、0.021 1、0.018 9 s,F1得分均高于其他模型。由识别结果可知,与其他模型相比,尽管可学习参数总数和模型大小几乎相同,但TN模块的性能效果最佳。
2.3.2 基于不同模块的YOLOX-L 识别效果比较
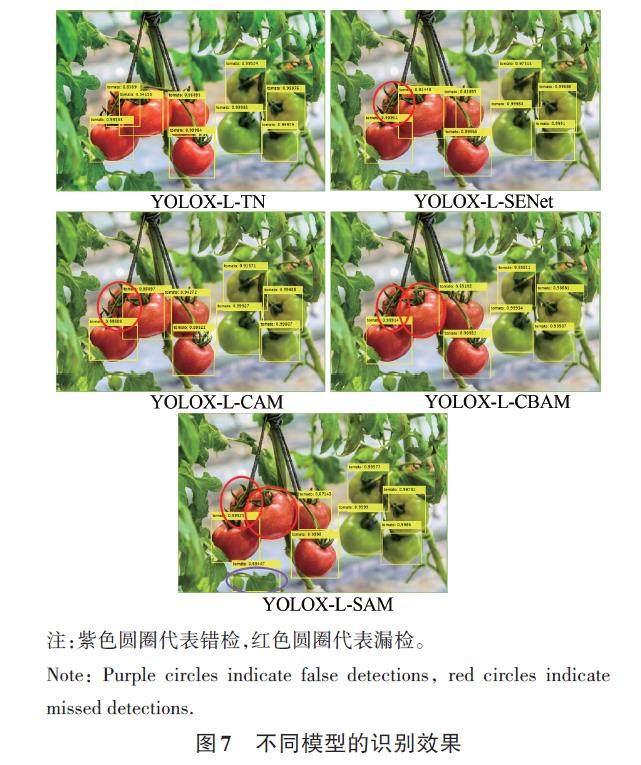
为了更直观地体现TN模块与其他模块的作用效果,将YOLOX-L-TN 与YOLOX-L-SENet、YOLOX-L-CAM、YOLOX-L-CBAM、YOLOX-LSAM在番茄果实图像中的识别效果进行比较,结果如图7所示。可以看出,与YOLOX-L-TN 识别效果进行对比,其他模型均有漏检或者错检的现象。YOLOX-L-SENet和YOLOX-L-CAM在番茄被遮挡的情况下出现单个番茄漏检现象;YOLOX-LCBAM出现2个番茄漏检的现象;YOLOX-L-SAM由于对番茄特征提取不够充分,除了漏检现象,还存在错检的现象。相比之下,YOLOX-L-TN不存在番茄漏检或错检的现象,识别效果最佳,鲁棒性高。
3 讨论
本文提出了YOLOX-L的改进型目标识别模型YOLOX-L-TN,与Liu等[15]的改进型YOLOv3模型和龙洁花等[16]的改进型Mask R-CNN模型相比,AP 值提升了10.92、1.24 个百分点。与SENet、CAM、CBAM 和CAM 进行对比试验,本文提出的模型在识别精度和速度方面均优于其他类似模型,其主要原因为:TN模块位于输入端与主干网络之间,重点关注通道间传递的信息,能够更多地保留图像的原始信息,可以更充分地提取遮挡番茄信息,进一步提高模型的识别精度和速度;FPN增强了整个金字塔结构的语义信息,定位信息并没有增强,而PAN对FPN进行定位信息的补充[30];PAN 借鉴的是PANet 网络,PANet 网络中特征图结合采用Add操作,而PAN采用Concat操作,Add将提取到的语义信息进行叠加,保留图像的正确高激活,避免在处理过程中对正确激活的削弱,而Concat增加了图像的特征数,实现了多尺度特征的融合。
然而,由于数据集质量和数量的原因,尽管YOLOX-L-TN模型提升了AP值,但是还有提升的空间,在之后的工作中,将对数据集进行进一步的优化和扩充,并对模型进行精简和优化,使其能尽快应用到智能采摘机器人当中。总体来说,本文提出的YOLOX-L-TN 模型的性能优于其他类模型,可为后期提高番茄果实的智能采摘的效率提供一定的技术支持。
参考文献
[1] 李君明,项朝阳,王孝宣,等“. 十三五”我国番茄产业现状及展望[J].中国蔬菜,2021(2):13-20.
LI J M, XIANG Z Y, WANG X X, et al .. Current situation andprospect of tomato industry in China during the 13th Five-YearPlan [J]. Chin. Veg., 2021(2):13-20.
[2] 刘继展. 温室采摘机器人技术研究进展分析[J].农业机械学报,2017.48(12):1-18.
LIU J Z. Research progress analysis of robotic harvestingtechnologies in greenhouse [J]. Trans. Chin. Soc. Agric. Mach.,2017,48(12):1-18.
[3] KONDO N, YATA K, IIDA M, et al . Development of an endeffectorfor a tomato cluster harvesting robot [J]. Eng. Agric.Environ. Food., 2010,3(1):20-24.
[4] XIE H, KONG D, SHAN J, et al .. Study the parametric effect ofpulling pattern on cherry tomato harvesting using RSM-BBDtechniques [J/OL]. Agriculture, 2021,11(9):815 [2024-02-24].https://doi.org/10.3390/agriculture11090815.
[5] 李寒,陶涵虓,崔立昊,等.基于SOM-K-means算法的番茄果实识别与定位方法[J].农业机械学报,2021,52(1):23-29.
LI H, TAO H X, CUI L H, et al .. Tomato fruit recognition andlocation method based on SOM-K-means algorithm [J]. Trans.Chin. Soc. Agric. Mach., 2021,52(1):23-29.
[6] 王海楠,弋景刚,张秀花.番茄采摘机器人识别与定位技术研究进展[J].中国农机化学报,2020,41(5):188-196.
WANG H N, GE J G, ZHANG X H. Research progress onidentification and localization technology of tomato pickingrobot [J]. J. Chin. Agric. Mech., 2020,41(5):188-196.
[7] 刘俊明,孟卫华.基于深度学习的单阶段目标检测算法研究综述[J].航空兵器,2020,27(3):44-53.
LIU J M, MENG W H. A review of single-stage objectdetection algorithms based on deep learning [J]. Aero Weap.,2020,27(3):44-53.
[8] 张境锋,陈伟,魏庆宇,等.基于Des-YOLO v4的复杂环境下苹果检测方法[J].农机化研究,2023,45(5):20-25.
ZHANG J F, CHEN W, WEI Q Y, et al .. Apple detectionmethod in complex environment based on Des-YOLOv4 [J]. J.Agric. Mech. Res., 2023,45(5):20-25.
[9] 张俊宁,毕泽洋,闫英,等.基于注意力机制与改进YOLO的温室番茄快速识别[J].农业机械学报,2023,54(5):236-243.
ZHANG J N, BI Z X, YAN Y, et al .. Rapid recognition ofgreenhouse tomatoes based on attention mechanism andimproved YOLO [J]. Trans. Chin. Soc. Agric. Mach., 2023,54(5):236-243.
[10] ZENG T H, LI S Y, SONG Q M, et al .. Lightweight tomato realtimedetection method based on improved YOLO and mobiledeployment [J]. Comput. Electron. Agric., 2023,205:107625.
[11] QI J T, LIU X N, LIU K, et al .. An improved YOLOv5 modelbased on visual attention mechanism: application to recognition oftomato virus disease [J]. Comput. Electron. Agric., 2022,194:106780.
[12] 张立杰,周舒骅,李娜,等.基于改进SSD卷积神经网络的苹果定位与分级方法[J].农业机械学报,2023,54(6):223-232.
ZHANG L J, ZHOU S H, LI N, et al .. Apple localization andgrading method based on improved SSD convolutional neuralnetwork [J]. Trans. Chin. Soc. Agric. Mach., 2023,54(6):223-232.
[13] 毛锐,张宇晨,王泽玺,等.利用改进Faster-RCNN识别小麦条锈病和黄矮病[J].农业工程学报,2022,38(17):176-185.
MAO R, ZHANG Y C, WANG Z X, et al .. Identification ofwheat stripe rust and yellow dwarf by improved Faster-RCNN [J].Trans. Chin. Soc. Agric. Eng., 2022,38(17):176-185.
[14] 梁喜凤,章鑫宇,王永维.基于改进Mask R-CNN的番茄侧枝修剪点识别方法[J].农业工程学报,2022,38(23):112-121.
LIANG X F, ZHANG X Y, WANG Y W. Identification methodof tomato lateral branch pruning points based on improvedMask R-CNN [J]. Trans. Chin. Soc. Agric. Eng., 2022,38(23):112-121.
[15] LIU G, NOUAZE J C, TOUKO MBOUEMBE P L, et al .. YOLOtomato:a robust algorithm for tomato detection based onYOLOv3 [J/OL]. Sensors, 2020,20(7):2145 [2024-02-24]. https://doi.org/10.3390/s20072145.
[16] 龙洁花,赵春江,林森,等.改进Mask R-CNN的温室环境下不同成熟度番茄果实分割方法[J].农业工程学报,2021,37(18):100-108.
LONG J H, ZHAO C J, LIN S, et al . Improved segmentationmethod of tomato fruit with different ripeness in greenhouseenvironment by Mask R-CNN [J]. Trans. Chin. Soc. Agric.Eng., 2021,37(18):100-108.
[17] AFONSO M, FONTEJIN H, FIORENTIN F S, et al .. Tomatofruit detection and counting in greenhouses using deeplearning [J/OL]. Front. Plant Sci., 2020,11:571299 [2024-02-24]. https://doi.org/10.3389/fpls.2020.571299.
[18] 刘之瑜,张淑芬,刘洋,等.基于图像梯度的数据增广方法[J].应用科学学报,2021,39(2):302-311.
LIU Z Y, ZHANG S F, LIU Y, et al .. Data augmentationmethod based on image gradient [J]. J. Appl. Sci., 2021,39(2):302-311.
[19] 赵越,卫勇,单慧勇,等.基于深度学习的高分辨率麦穗图像检测方法[J].中国农业科技导报,2022,24(9):96-105.
ZHAO Y, WEI Y, SHAN H Y, et al .. High resolution wheatimage detection method based on deep learning [J]. J. Agric.Sci. Technol., 2022,24(9):96-105.
[20] 杨坚,钱振,张燕军,等.采用改进YOLOv4-tiny的复杂环境下番茄实时识别[J].农业工程学报,2022,38(9):215-221.
YANG J, QIAN Z, ZHANG Y J, et al .. Tomato real-timerecognition in complex environment using improved YOLOv4-tiny [J]. Trans. Chin. Soc. Agric. Eng., 2022,38(9):215-221.
[21] XU P H, FANG N, LIU N, et al .. Visual recognition of cherrytomatoes in plant factory based on improved deep instancesegmentation [J]. Comput. Electron. Agric., 2022,197:106991.
[22] ANANDHAKRISHNAN T, JAISAKTHI S M. Deep convolutionalneural networks for image based tomato leaf disease detection [J].Sustain. Chem. Pharm., 2022,30:100793.
[23] 刘芳,刘玉坤,林森,等.基于改进型YOLO的复杂环境下番茄果实快速识别方法[J].农业机械学报,2020,51(6):229-237.
LIU F, LIU Y K, LIN S, et al .. Rapid identification method oftomato fruit in complex environment based on improved YOLO [J].Trans. Chin. Soc. Agric. Mach. 2020,51(6):229-237.
[24] 成伟,张文爱,冯青春,等.基于改进YOLOv3的温室番茄果实识别估产方法[J].中国农机化学报,2021,42(4):176-182.
CHENG W, ZHANG W A, FENG Q C, et al .. Fruit recognitionand yield estimation method of greenhouse tomato based onimproved YOLOv3 [J]. J. Chin. Agric. Mech., 2021, 42(4):176-182.
[25] LI H P, LI C Y, LI G B, et al .. A real-time table grapedetection method based on improved YOLOv4-tiny network incomplex background [J]. Biosyst. Eng., 2021,212:347-359.
[26] ZHANG Y C, ZHANG W B, YU J Y, et al .. Complete andaccurate holly fruits counting using YOLOX object detection [J/OL].Comput. Electron. Agric., 2022, 198: 107062 [2024-02-26].https://doi.org/10.1016/j.compag.2022.107062.
[27] ZHANG Y J, MA B X, HU Y T, et al .. Accurate cotton diseasesand pests detection in complex background based on animproved YOLOX model [J/OL]. Comput. Electron. Agric.,2022, 203: 107484 [2024-02-26]. https://doi. org/10.1016/j.compag.2022.107484.
[28] 何斌,张亦博,龚健林,等.基于改进YOLOv5的夜间温室番茄果实快速识别[J].农业机械学报,2022,53(5):201-208.
HE B, ZHANG Y B, GONG J L, et al .. Rapid identification ofgreenhouse tomato fruits at night based on improved YOLOv5 [J].Trans. Chin. Soc. Agric. Mach., 2022,53(5):201-208.
[29] 李柯泉,陈燕,刘佳晨,等.基于深度学习的目标检测算法综述[J].计算机工程,2022,48(7):1-12.
LI K Q, CHEN Y, LIU J C, et al . An overview of objectdetection algorithms based on deep learning [J]. Comput. Eng.,2022,48(7):1-12.
[30] 岳有军,孙碧玉,王红君,等.基于级联卷积神经网络的番茄果实目标检测[J].科学技术与工程,2021,21(6):2387-2391.
YUE Y J, SUN B Y, WANG H J, et al . Tomato fruit targetdetection based on cascaded convolutional neural network [J].Sci. Technol. Eng., 2021,21(6):2387-2391.
(责任编辑:温小杰)
基金项目:天津市科技计划项目(21YDTPJC00600);天津市教委教改项目(A201006102)。
猜你喜欢
计算机应用(2019年3期)2019-07-31
无线互联科技(2019年9期)2019-07-29
无线互联科技(2019年9期)2019-07-29
智能计算机与应用(2019年3期)2019-07-01
智能计算机与应用(2019年3期)2019-07-01
智能计算机与应用(2019年3期)2019-07-01
电子技术与软件工程(2019年5期)2019-06-20
软件导刊(2019年1期)2019-06-07
数字技术与应用(2019年2期)2019-05-14
现代电子技术(2018年8期)2018-04-13