基于Resnet的林地无人机图像去雾改进算法
2024-06-15 00:00:00牛弘健刘文萍陈日强宗世祥骆有庆
南京林业大学学报(自然科学版) 2024年2期


收稿日期Received:2022-03-03""" 修回日期Accepted:2022-05-14
基金项目:国家重点研发计划(2021YFD1400900);国家林业和草原局重大应急科技项目(ZD202001)。
第一作者:牛弘健(niuhj1996@gmail.com)。
*通信作者:刘文萍(wendyl@vip.163.com),教授。
引文格式:
牛弘健,刘文萍,陈日强,等. 基于Resnet的林地无人机图像去雾改进算法. 南京林业大学学报(自然科学版),2024,48(2):175-181.
NIU H J, LIU W P, CHEN R Q, et al. Dehaze algorithm for woodland UAV images based on Resnet. Journal of Nanjing Forestry University (Natural Sciences Edition),2024,48(2):175-181.
DOI:10.12302/j.issn.1000-2006.202203011.
摘要:【目的】针对雾霾天气下林地无人机航拍图像存在对比度低、饱和度低和色调偏移等现象,基于Resnet网络,提出一种适应林地航拍场景的无人机图像去雾方法(DHnet)。【方法】林地场景下无人机图像具有纹理特征、高低频信息丰富的特点,在主干网络各个层级附加信息传递模块,将特征图转化为权值图进行筛选过滤并发送到其他层级,接收端设置阈值避免冗余信息的不良影响,再经密集链接增强全局去雾效果,提高图像高低频区域的去雾质量,最后在林地无人机有雾图像测试集上进行去雾实验。【结果】DHnet在林地图像测试集上的平均结构相似性为0.83,平均峰值信噪比为22.3 dB,分别较Resnet方法提高了4.8%和39.3%。【结论】本研究提出的算法能有效降低图像色调偏移,去除残留雾气信息,有效提高无人机航拍林地雾气图像的色彩保真度和细节信息保持度。
关键词:林地;无人机;图像去雾;深度学习
中图分类号:S758;TP75""""" 文献标志码:A开放科学(资源服务)标识码(OSID):
文章编号:1000-2006(2024)02-0175-07
Dehaze algorithm for woodland UAV images based on Resnet
NIU Hongjian1,2, LIU Wenping1,2, CHEN Riqiang1,2, ZONG Shixiang3, LUO Youqing3
(1. College of Information Science and Technology, Beijing Forestry University, Beijing 100083, China; 2. National Forestry and Grassland Administration, Forestry Intelligent Information Processing Engineering and Technology Research Center, Beijing 100083, China; 3. College of Forestry, Beijing Forestry University, Beijing 100083, China)
Abstract: 【Objective】 Aiming to address the phenomena of low contrast, low saturation, and hue shift in unmanned aerial vehicle (UAV) photography images of forestland under hazy conditions, this study proposes a de-fogging method for UAV images adapted to forestland aerial photography scenes based on Resnet. 【Method】 The UAV images in woodland scenes were characterized by texture features and rich high-and low-frequency information. GFF information transfer modules were attached to each layer of the backbone network to transform feature maps into weight maps for filtering and sending to other layers, and thresholds were set at the receiving end to avoid the adverse effects of redundant information. Then, the global defogging effect was enhanced by dense links to improve the defogging quality in high- and low-frequency image regions. Finally, defogging experiments were conducted on a test set of woodland UAV images with fog. 【Result】 The average structural similarity of DHnet on the test set of woodland images was 0.83, and the average peak signal-to-noise ratio was 22.3 dB, which represented improvements of 4.8% and 39.3%, respectively, compared with the Resnet method. 【Conclusion】 The algorithm can effectively reduce tonal shift and remove residual fog, improving the color fidelity and detailed information retention of aerial woodland fog images obtained by UAV photography.
Keywords:woodland; unmanned aerial vehicle(UAV); image dehaze; deep learning
近年来无人机技术迅速发展,因其机动灵活、成像分辨率高、人员风险低等优点,能够为农林业资源调查、生态环境监测治理、农林业执法管理等工作提供关键信息。无人机航拍图像采集过程易受到环境影响,在气象条件不佳的情况下,空气中悬浮粒子对光线产生散射,使目标物体反射的光线发生衰减,同时散射的环境光混合到摄像头收集的光线中,使成像后图像的对比度、颜色等特征发生改变。为美化图像的视觉效果以及突出图像特征以便计算机视觉系统处理,需要对图像进行去雾,降低环境对图像产生的不良影响。目前,图像去雾的方法总体可分为两类:图像增强方法和图像复原方法。
基于图像增强的方法没有分析雾天图像退化的物理模型,而是直接调整图像参数,增强有用信息,抑制无用信息以改善图像质量。Land等根据色彩恒常性提出Retinex理论,其中单尺度Retinex方法在动态范围内使暗区域图像细节得到较好的增强,但图像颜色易过饱和。多尺度Retinex方法可提高雾天环境图像的质量,但当雾分布不均时,也易造成颜色过饱和现象。Kim等采用局部子块重叠的直方图均衡化增强了有雾图像局部对比度。Liao等提出一种基于边界约束和递归双边滤波的自适应去雾算法;Ancuti等通过应用白平衡和对比度增强,提出了融合多幅原始图像的图像去雾方法。但基于直方图和图像融合的去雾方法易出现饱和度失真和雾残留问题。Liu等提出多尺度曝光融合算法区分场景中较暗和较亮的区域细节,但难以应对复杂光源场景的去雾任务。
基于图像复原的方法主要研究雾天图像退化原因,通过建立雾天大气散射模型求解图像与透射率之间的关系,其中包括基于先验知识和深度学习的去雾方法。前者根据统计学经验设定约束参数,利用大气散射物理模型计算无雾图像。He等 提出的DCP算法通过大量统计和先验信息发现图像暗通道规律,并根据暗通道先验估计场景深度,再根据大气散射模型计算出去雾图像,但该方法针对高亮区域效果较差。随着机器学习发展,利用深度学习获取图像透射率、大气光等参数的研究越来越多,一定程度上避免了先验信息估计产生的累计误差。Cai等采用卷积神经网络实现多尺度特征的自动提取,从而估计图像透射率,实现图像去雾;Li等通过将透射率和大气光整合为一个参数,设计了轻量级卷积神经网络,最小化重构误差,提高了去雾质量。但上述两种方法在雾气分布不均匀时,均存在雾残留现象;Qu等提出了EPDN去雾网络,该网络使用生成器和多尺度判别器进行对抗训练达到去雾效果,再利用增强模块优化图像的色彩信息,但容易造成图像失真过饱和;Liu等通过融合不同尺度的特征图像以增强图像细节信息,搭建了多尺度去雾网络,但没有区别对待局部特征和全局特征,去雾不完全。
以上方法在图像去雾领域效果显著,但仍存在雾残留、色差较大等问题,难以适应无人机林地航拍图像的去雾任务。本研究提出DHnet去雾网络,设计了独特的信息传递方式,层级特征经过筛选过滤传递到其他层级,有效增强图像高低频信息,可在去除雾气残留的前提下提高了无人机林地航拍图像去雾的色彩保真度和细节信息保持度。
1" 材料与方法
1.1" 研究区域及数据采集
实验林地航拍图片采集于辽宁省抚顺市南杂木镇(124°20′E,41°92′N)、浙江省义乌市佛堂镇(120°08′E,29°22′N)、安徽省池州市九华山(117°84′E,30°41′N)。使用大疆PHANTOM 4 RTK四旋翼航拍机,轴距350 mm,最大起飞质量4 kg,水平飞行速度16 m/s飞行高度30~240 m。无人机搭载3轴云台相机DJI camera,1英寸CMOS传感器,快门速度8~1/8 000 s,图像分辨率4 864×3 648,航片为含有地理坐标、飞行高度等元信息的JPEG格式图像。
1.2" 理论基础
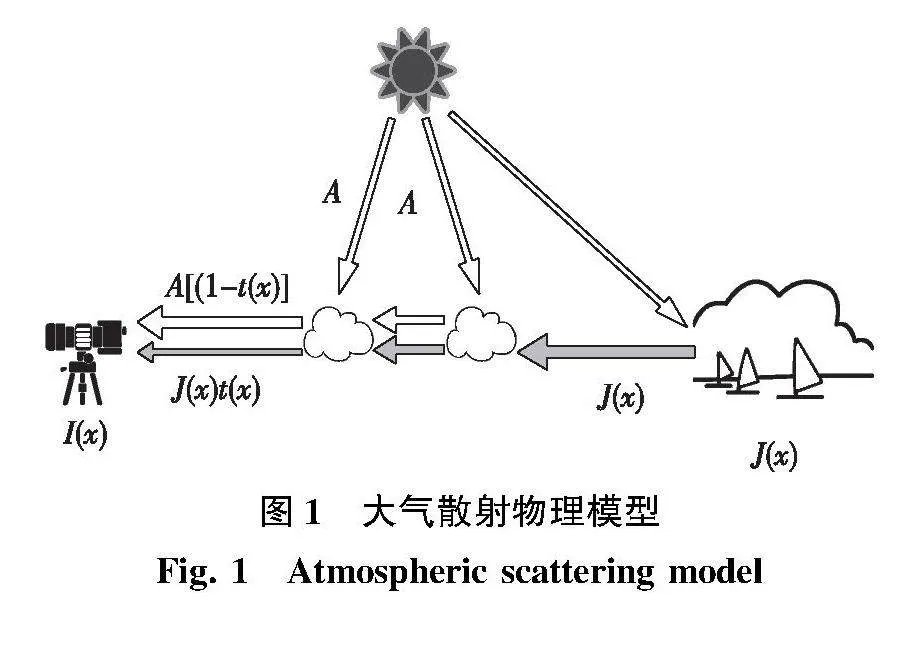
雾天时,空气中悬浮着水蒸气、气溶胶等许多大半径颗粒,它们对摄像系统收集到的光线产生吸收作用和散射作用,使成像质量显著下降。散射作用根据入射光波长与散射粒子半径之间的相对关系,可分为拉曼散射、瑞利散射和米氏散射。其中米氏散射是指粒子直径接近入射波长时发生的散射,通常用于描述水蒸气、雾霾、灰尘等大半径悬浮颗粒影响下的成像散射作用,米氏散射影响下的大气散射物理模型见图1。
根据米氏散射模型与大气散射物理模型,Schechner等将大气散射物理模型简化为雾天成像模型:
I(x)=Aρ(x)e-βd(x)+A(1-e-βd(x))。(1)
式中:I(x)为摄像设备采集到的目标x的有雾图像;A为大气光;ρ(x)为场景反射率;β是与可见距离相关的大气散射系数;d(x)是x处的深度信息。" 雾天成像模型可简化为:
I(x)=J(x)t(x)+A。(2)
式中:J(x)为无雾清晰图像;t(x)为场景透射率,t(x)=e-βd(x)。J(x)t(x)可描述真实无雾图像在介质中随着场景深度增加产生衰减的过程;A为大气光幕,可描述场景中的大气散射光随着场景深度增加造成的场景模糊和颜色失真。
近些年来的去雾算法大多基于大气散射模型,再通过某种先验信息和假设对模型中t(x)、A进行估计,通过式(2)计算出清晰图像J(x)。基于先验知识的去雾方法需要对场景透射率等众多关键参数进行估计,易形成较大累积误差,因此去雾程度、视觉效果不够理想,不能适应林地无人机图像去雾的特殊场景。
1.3" 研究方法
1.3.1" Resnet网络
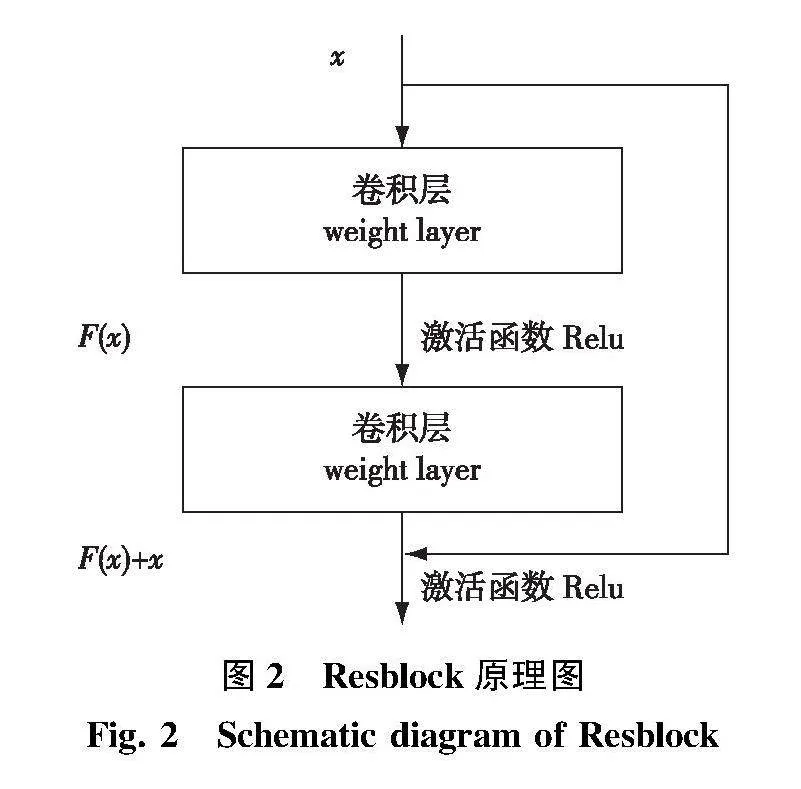
深度学习类去雾方法通过对大量训练集图像进行学习,建立有雾图像和对应无雾图像各像素点之间的映射关系并逐步优化更新中间参数,提升模型质量,最后将该模型用于去雾任务。图像信息具有高维特征,浅层网络难以有效建立有雾图像和对应无雾图像映射关系,Resnet网络是对VGG等浅层网络的改进,相较于浅层网络,Resnet在网络层使用Resblock结构,保持梯度稳定的同时加深了网络深度。Resblock是一种具有强大的容错率和学习能力的网络基础结构,相较于VGG在网络深层出现的失真和梯度不稳定现象,Resblock通过拟合非线性映射的方式使得原始信号可能直接传入网络的深层,避免在反向传播过程中产生的梯度爆炸和梯度消失现象,在保持基本性能的情况下减小了网络运算量,有良好的自适应性、鲁棒性。Resblock的残差学习单元如图2所示,其中Relu是激活函数,该段神经网络的输入为x、期望输出为H(x),若x为初始结果,则此段网络学习目标为 F(x) = H(x)-x。Resblock单元就是将学习目标变为输出和输入的残差H(x)-x,使用F(x)+x来拟合非线性原始映射,降低运算成本,提升稳定性。
Resnet去雾方法实质是使用深度学习替代先验信息估计,从而完成对式(2)中无雾图像J(x) 的还原,相较于先验信息估计,Resnet方法在建立图像映射的过程中包含了如伽马校正等其他超参数,在统一化的网络参数更新中得到补偿。网络由两层卷积层基层与4组特征层级递增的卷积组构成,第1卷积组包含3个Resblock结构,第2卷积组包含3个Resblock结构,第3卷积组包含23个Resblock结构,第4卷积组包含9个Resblock结构,这些层级内的特征维度逐渐升高,从边角点等低级特征到纹理细节、结构等高级特征、再到逻辑信息、语义等抽象的更高层级特征,使有雾图像和对应无雾图像之间的映射更为准确。Resnet去雾网络结构如图3所示。
1.3.2" 改进的DHnet去雾网络
针对林地图像Green通道值较高、图像高频信息丰富等特点,本研究提出一种主要针对40~240 m拍摄高度的无人机有雾图像、网络结构设计基于Resnet和深度学习的图像去雾方法。为提升图像去雾质量,框架结合DFN模块、特征传递等方法增强模型的学习能力,最后优化主干网络结构。
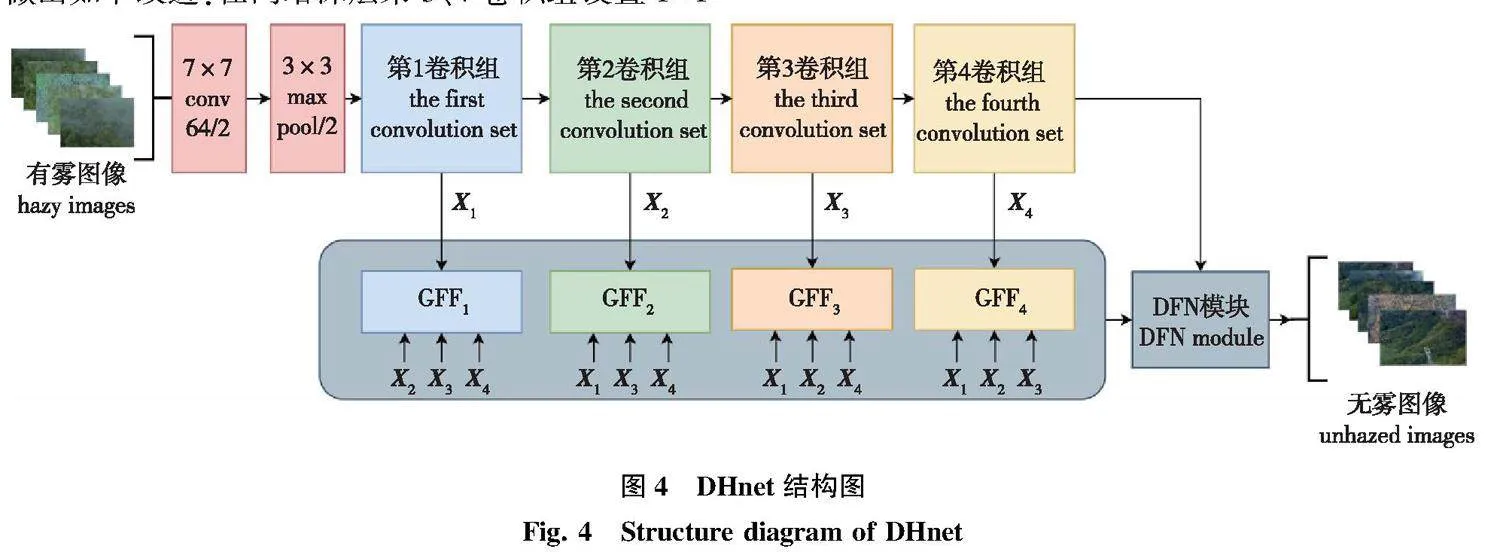
针对林区无人机图像的特点,对Resnet网络做出如下改进:在网络深层第3、4卷积组设置1×1卷积调整维度以减小计算量,加快运行速度;在主干网络附加GFF模块构成的子网络,以传递特征图中重要特征向量,丰富低层级的具体特征和高层级的抽象特征,从而提升林地图像细节部分质量和整体色彩还原度;设计与GFF模块正交的DFN模块以编码更多的全局信息,在去雾过程中隐性地对其他超参数进行调整,实现图像整体的优化。改进后的DHnet网络结构如图4所示。
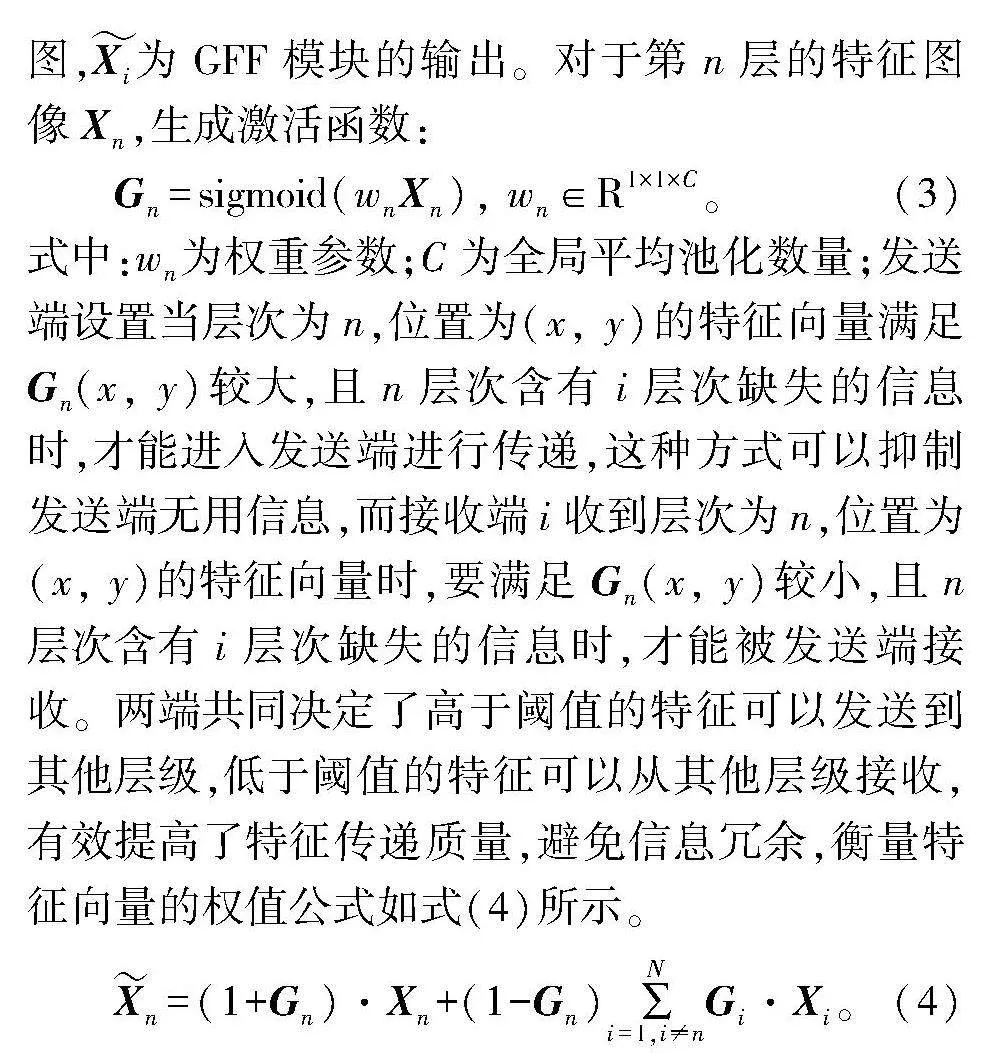
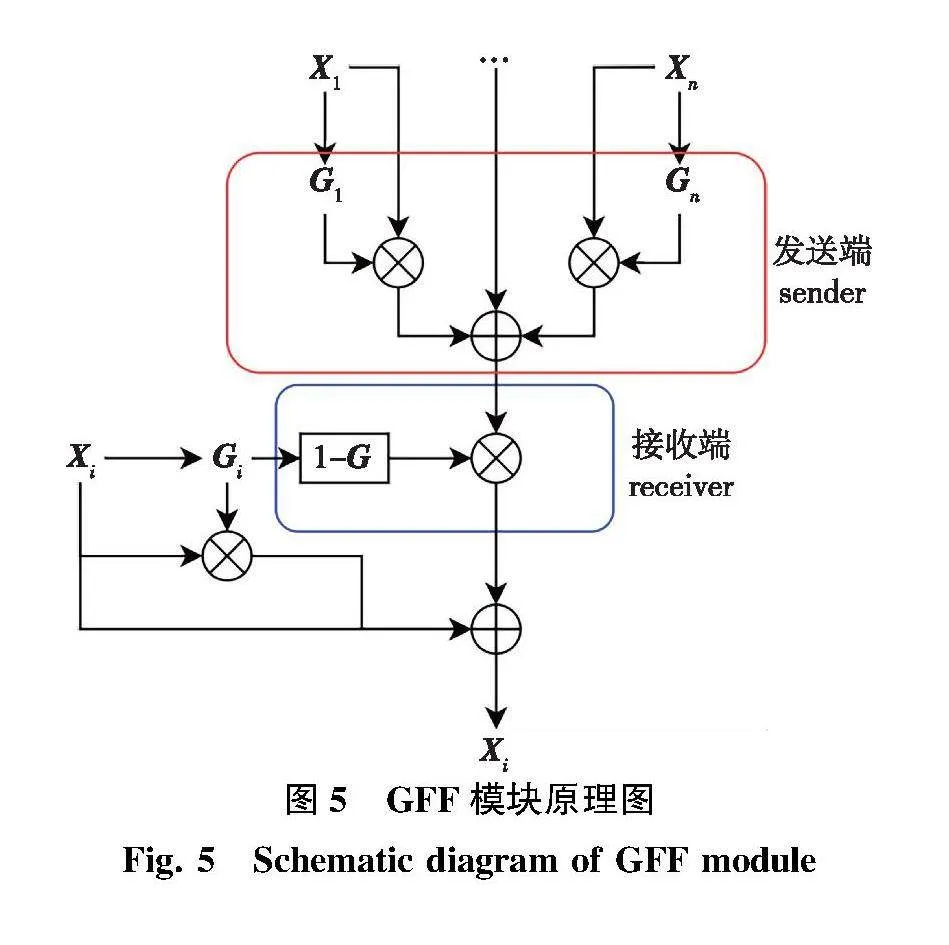
1)GFF模块。利用特征传递可以在大量无用信息的干扰下筛选符合不同层级需求的信息,将局部特征映射到不同层级网络。GFF模块产生固定大小的特征向量且使网络结构适应多比例、多尺寸的图像输入,为筛选各层级特征传递产生的信息冗余,DHnet使用过滤机制来抑制传播过程中产生的噪声。GFF模块从其他层筛选并提取特征,同时向其他层传递特征,通过门控机制判别信息的有效性,基于门控机制,能够有效减少信息冗余。GFF模块的具体原理如图5所示。X1~Xn分别表示发送端1~n的特征图,G1~Gn分别表示发送端1~n的权值图,Xi和Gi分别为接收端i的特征图和权值图,Xi为GFF模块的输出。对于第n层的特征图像Xn,生成激活函数:
Gn=sigmoid(wnXn), wn∈R1×1×C。(3)
式中:wn为权重参数;C为全局平均池化数量;发送端设置当层次为n,位置为(x, y)的特征向量满足Gn(x, y)较大,且n层次含有i层次缺失的信息时,才能进入发送端进行传递,这种方式可以抑制发送端无用信息,而接收端i收到层次为n,位置为(x, y)的特征向量时,要满足Gn(x, y)较小,且n层次含有i层次缺失的信息时,才能被发送端接收。两端共同决定了高于阈值的特征可以发送到其他层级,低于阈值的特征可以从其他层级接收,有效提高了特征传递质量,避免信息冗余,衡量特征向量的权值公式如式(4)所示。
Xn=(1+Gn)·Xn+(1-Gn)∑Ni=1,i≠nGi·Xi。(4)
2)DFP模块。DFN模块是一种上下文建模方法,可以编码更多的全局信息且与GFF模块正交,所以在GFF完成主干网络的信息传递之后加入DFN模块不会与GFF模块相互影响。在特征传递之后加入DFN模块将进行密集链接可以加强信息密度,优化林地图像去雾的整体结构、彩度、亮度表现,主干网络中GFF的输出之后,使用DFP对其输出进行信息编码,以获取全局上下文信息。
yi=Hi(yn,X1,…,Xi-1)。(5)
式中:yn为主干网络中第n层的输出;Xn为GFF中第i个模块的输出;Hi为单个卷积层。DFN的作用就是把GFF的输出与主干网络中的卷积层相结合,进一步提升林地去雾图像的整体质量。
1.4" 数据集与模型训练
基于上述3个地区的无人机航片,通过大气散射模型随机生成不同雾度的模拟图像,再经过旋转、剪切、拉伸等扩充,生成1 335对无雾图像与有雾图像之间的映射作为训练数据集,以样地真实有雾航片100张作为测试集。本研究采集的原始图像分辨率(像素)为4 864×3 648,为减小运算量、加快训练速度,在构建数据集阶段将图像将裁剪为800×450像素进行训练。
DHnet林地图像去雾模型的编写和训练是基于Pytorch框架在Window10操作系统中完成,编程语言为Python 3.0。Pytorch框架是开源框架,提供公共的库和模块,有利于网络的编写和训练。试验前,利用 numpy、OpenCV-python、matplotlib等库进行编译和模型参数设定。在训练阶段,对训练图像中的无雾图像和人工合成的有雾图像进行编号标注后输入模型,通过正向传播得到人工合成雾图的去雾结果,再由损失函数计算其与真实无雾图像的结构相似性误差,通过网络反向传播进行参数更新。多次迭代该过程,直到损失函数值趋于稳定,完成林地图像去雾模型的训练。
在模型训练过程中,损失率(Loss)是反映最终训练模型分类效果好坏的最主要因素。损失函数选用属于感知相关指标(perceptually motivated),本研究中损失函数L(P)定义为:
l(p)=2μxμy+C1μ2x+μ2y+C1·2σxy+C2σ2x+σ2y+C2;(6)
L(P)=-1N1∑p∈Pl(p)。(7)
式中:P为Patch像素集合;p为P中的像素点;N1为P的数量;x和y分别表示处理后图像和真实图像;μx和μy分别为x和y的均值;σx、σy是x和y的协方差;C1和C2为避免分母为0的常数。
2" 结果与分析
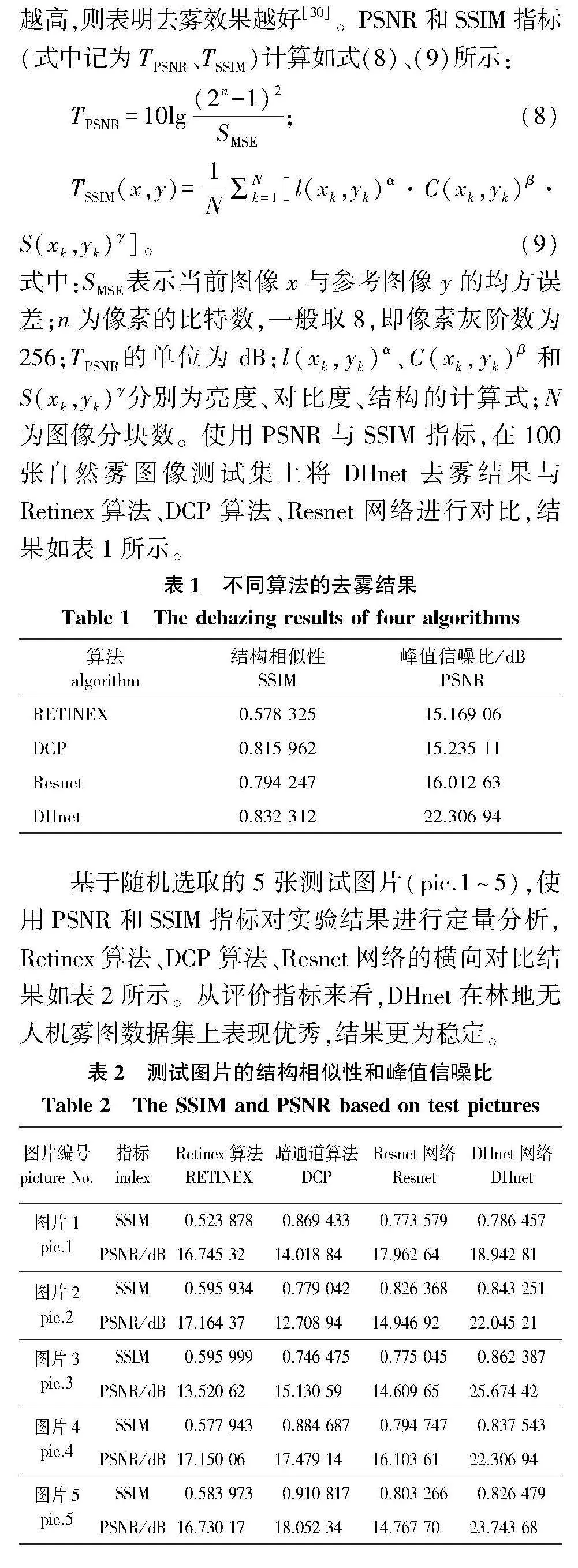
除人为视觉效果评价外,本研究随机选取的5张测试图片,将DHnet算法与Retinex算法、DCP算法、Resnet网络进行比较测试,测试标准采用峰值信噪比(PSNR)和结构相似性指标(SSIM)。PSNR是评价图像降噪质量的常用指标,评价雾天图像相对于无雾图像的噪声强度;SSIM是衡量两幅图像之间相似度的指标,评价雾天图像与无雾图像之间图像结构的相似性。其中,峰值信噪比越高,结构相似性越高,则表明去雾效果越好。PSNR和SSIM指标(式中记为TPSNR、TSSIM)计算如式(8)、(9)所示:
TPSNR=10lg(2n-1)2SMSE;(8)
TSSIM(x,y)=1N∑Nk=1。(9)
式中:SMSE表示当前图像x与参考图像y的均方误差;n为像素的比特数,一般取8,即像素灰阶数为256;TPSNR的单位为dB;l(xk,yk)α、C(xk,yk)β和S(xk,yk)γ分别为亮度、对比度、结构的计算式;N为图像分块数。使用PSNR与SSIM指标,在100张自然雾图像测试集上将DHnet去雾结果与Retinex算法、DCP算法、Resnet网络进行对比,结果如表1所示。
基于随机选取的5张测试图片(pic.1~5),使用PSNR和SSIM指标对实验结果进行定量分析,Retinex算法、DCP算法、Resnet网络的横向对比结果如表2所示。从评价指标来看,DHnet在林地无人机雾图数据集上表现优秀,结果更为稳定。
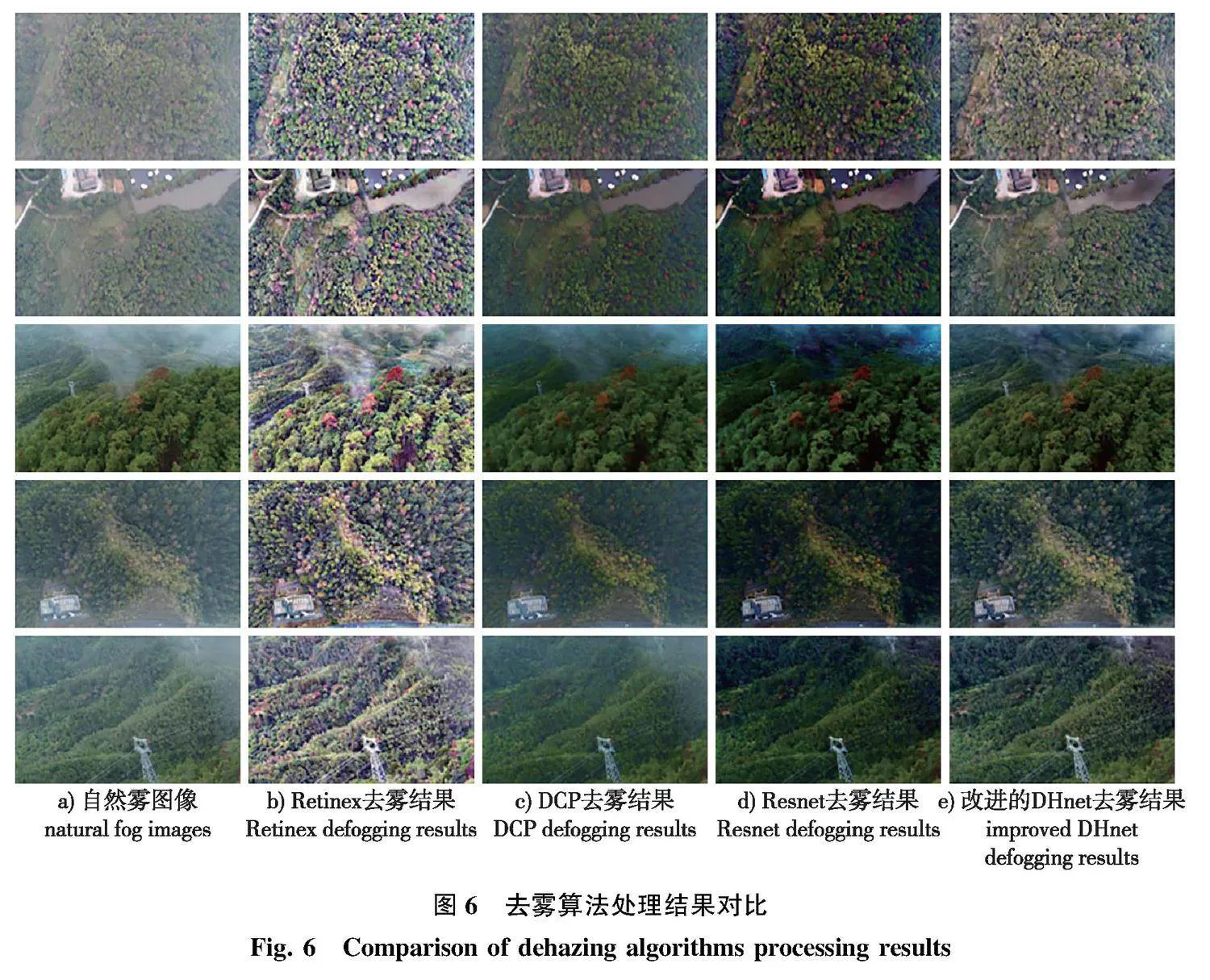
去雾算法处理结果对比见图6,从人为视觉效果来看,Retinex算法色彩失真严重,去雾不彻底,这可能是因为林地图像Green通道普遍高于其他两个通道值,经Retinex算法调整后产生失真;DCP算法雾度残留,可能是因为DCP算法难以应对包含亮色物体的场景;DHnet的结果相较于Resnet色彩更均衡,去雾彻底,视觉效果和定量指标评价都有很大提升。实验结果表明,DHnet在林地无人机图像去雾的实际测试中取得更好的效果,在各级特征传递的过程中使用过滤机制可以有效增强图像去雾的性能。
a. 自然雾图像natural fog images;b. Retinex去雾结果Retinex defogging results;c. DCP去雾结果DCP defogging results;d. Resnet去雾结果Resnet defogging results;e. 改进的DHnet去雾结果improved DHnet defogging results
3" 结" 论
1)深度学习类去雾算法无需进行先验估计和手动提取特征,通过对大量图像数据的训练逐步更新网络参数,进行简单少量预处理后直接输入模型进行训练,与传统算法相比降低了预处理的难度;在训练集中使用航拍清晰图像作为无雾图像,使用对应生成雾图作为有雾图像,符合该种网络需要像素点完全对应的成对图像作为训练集的要求,同时降低了图像采集工作的难度。
2)网络模型应当在各层级选取合适的卷积尺寸和结构层数,否则可能导致网络深层不稳定,层级特征学习不完全,图像质量下降,Resblock结构能够在网络深层使用线性映射拟合复杂映射,提升了稳定性,GFF模块能够选择性地传递、补充不同层级之间的特征,解决了Resnet中层级特征提取不完全的缺点,最终提升了去雾质量。实验结果表明,本研究构建的DHnet在人为视觉和定量指标评价上都取得了更好的效果。
参考文献(reference):
[1]马鸿伟, 刘海, 姚顺彬, 等. 基于林业遥感的树种分类应用分析与展望.林业资源管理, 2020(3): 118-121. MA H W, LIU H, YAO S B, et al. Analysis and prospect on the application of tree species classification based on forestry remote sensing . For Resour Manag, 2020(3): 118-121. DOI:10.13466/j.cnki.lyzygl.2020.03.022.
[2]韩文霆, 张立元, 牛亚晓, 等. 无人机遥感技术在精量灌溉中应用的研究进展.农业机械学报, 2020, 51(2): 1-14.HAN W T, ZHANG L Y, NIU Y X, et al. Review on UAV remote sensing application in precision irrigation. Trans Chin Soc Agric Mach, 2020, 51(2): 1-14. DOI: 10.6041/j.issn.1000-1298.2020.02.001.
[3]徐誉远, 胡爽, 王本洋. 无人机遥感在我国森林资源监测中的应用动态.林业与环境科学, 2017, 33(1): 97-101.XU Y Y, HU S, WANG B Y. Present status of unmanned aerial vehicles remote sensing for forest resources monitoring in China . For Enviro Sci, 2017, 33(1): 97-101. DOI: 10.3969/j.issn.1006-4427.2017.01.018.
[4]宋以宁, 刘文萍, 骆有庆, 等. 基于线性谱聚类的林地图像中枯死树监测.林业科学, 2019, 55(4): 187-195.SONG Y N, LIU W P, LUO Y Q, et al. Monitoring of dead trees in forest images based on linear spectral clustering . Sci Silvae Sin,2019,55(4):187-195.DOI: 10.11707/j.1001-7488.20190420.
[5]郭璠, 蔡自兴. 图像去雾算法清晰化效果客观评价方法.自动化学报, 2012, 38(9): 1410-1419. GUO F, CAI Z X. Objective assessment method for the clearness effect of image defogging algorithm. Acta Autom Sin, 2012, 38(9): 1410-1419. DOI:10.3724 /SP.J.1004.2012.01410.
[6]吴迪, 朱青松. 图像去雾的最新研究进展. 自动化学报, 2015, 41(2): 221-239. WU D, ZHU Q S. The latest research progress of image dehazing. Acta Autom Sin,2015,41(2): 221-239. DOI:10.16383/j.aas.2015.c131137.
[7]LAND E H, MCCANN J J. Lightness and retinex theory. J Op" Soc of Am, 1971, 61(1): 1-11. DOI: 10.1364/josa.61.000001.
[8]李学明. 基于Retinex理论的图像增强算法.计算机应用研究, 2005,22(2): 235-237.LI X M.Image enhancement algorithm based on retinex theory.Application Research of Computers, 2005,22(2): 235-237.
[9]李菊霞, 余雪丽. 雾天条件下的多尺度Retinex图像增强算法.计算机科学, 2013, 40(3): 299-301,F0003.LI J X, YU X L.Enhance algorithm for fog images based on improved multi-scale retinex . Comput Sci, 2013, 40(3): 299-301,F0003.DOI: 10.3969/j.issn.1002-137X.2013.03.068.
KIM J H, JANG W D, SIM J Y, et al. Optimized contrast enhancement for real-time image and video dehazing. J Vis Commun Image Represent,2013,24(3):410-425.DOI: 10.1016/j.jvcir.2013.02.004.
LIAO B, YIN P, XIAO C X. Efficient image dehazing using boundary conditions and local contrast. Comput Graph,2018,70:242-250.DOI: 10.1016/j.cag.2017.07.016.
ANCUTI C O, ANCUTI C. Single image dehazing by multi-scale fusion. IEEE Trans Image Process,2013,22(8):3271-3282.DOI: 10.1109/TIP.2013.2262284.
LIU Q Z, LUO Y Q, LI K, et al. Single image defogging method based on image patch decomposition and multi-exposure image fusion. Front Neurorobot,2021,15:700483.DOI: 10.3389/fnbot.2021.700483.
HE K M,SUN J,TANG X O.Single image haze removal using dark channel prior. IEEE" Trans Pattern Anal Moch" Intell, 2011,33(12):2341-2353.DOI:10.1109/TPAMI.2010.168.
CAI B, XU X, JIA K, et al. Dehazenet: an end-to-end system for single image haze removal. IEEE Trans Image Process,2016,25(11):5187-5198.DOI: 10.1109/TIP.2016.2598681.
LI B Y,PENG X L,WANG Z Y,et al.AOD-net:all-in-one deha-zing network//2017 IEEE International Conference on Computer Vision (ICCV).Venice,Italy:IEEE,2017:4780-4788.DOI: 10.1109/ICCV.2017.511.
QU Y Y,CHEN Y Z,HUANG J Y,et al.Enhanced Pix2pix deha-zing network//2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR).Long Beach,CA,USA: IEEE,2020:8152-8160.DOI: 10.1109/CVPR.2019.00835.
LIU X H,MA Y R,SHI Z H,et al.GridDehazeNet:attention-based multi-scale network for image dehazing//2019 IEEE/CVF International Conference on Computer Vision (ICCV).Seoul,Korea (South): IEEE,2020:7313-7322.DOI: 10.1109/ICCV.2019.00741.
XU Y,WEN J,FEI L K,et al.Review of video and image defogging algorithms and related studies on image restoration and enhancement.IEEE Access,2015,4:165-188.DOI: 10.1109/ACCESS.2015.2511558.
梁健,巨海娟,张文飞,等.偏振光学成像去雾技术综述.光学学报,2017,37(4):0400001.LIANG J,JU H J,ZHANG W F,et al.Review of optical polarimetric dehazing technique.Acta Opt Sin,2017,37(4):0400001.DOI: 10.3788/AOS201737.0400001.
SCHECHNER Y Y, NARASIMHAN S G, NAYAR S K. Polarization-based vision through haze. Appl Opt,2003,42(3):511-525.DOI: 10.1364/ao.42.000511.
王道累,张天宇.图像去雾算法的综述及分析.图学学报,2020,41(6):861-870 WANG D L,ZHANG T Y.Review and analysis of image defogging algorithm.J Graph,2020,41(6):861-870.DOI: 10.11996/JG.j.2095-302X.2020060861.
郭玥秀,杨伟,刘琦,等.残差网络研究综述.计算机应用研究,2020,37(5):1292-1297 GUO Y X,YANG W,LIU Q,et al.Survey of residual network.Appl Res Comput,2020,37(5):1292-1297.DOI: 10.19734/j.issn.1001-3695.2018.12.0922.
GAO S H,CHENG M M,ZHAO K,et al.Res2Net:a new multi-scale backbone architecture.IEEE Trans Pattern Anal Mach Intell,2021,43(2):652-662.DOI: 10.1109/TPAMI.2019.2938758.
REDMON J,FARHADI A.YOLO9000:better,faster,stronger//2017 IEEE Conference on Computer Vision and Pattern Recognition (CVPR).Honolulu,HI,USA: IEEE,2017:6517-6525.DOI: 10.1109/CVPR.2017.690.
LIU M J,WANG X H,ZHOU A J,et al.UAV-YOLO:Small object detection on unmanned aerial vehicle perspective.Sensors,2020,20(8):2238.DOI: 10.3390/s20082238.
ULLAH H,MUHAMMAD K,IRFAN M,et al.Light-DehazeNet:a novel lightweight CNN architecture for single image dehazing.IEEE Trans Image Process,2021,30:8968-8982.DOI: 10.1109/TIP.2021.3116790.
HE K M,ZHANG X Y,REN S Q,et al.Deep residual learning for image recognition//2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR).Las Vegas,NV,USA: IEEE,2016:770-778.DOI: 10.1109/CVPR.2016.90.
LI X T,ZHAO H L,HAN L,et al.Gated fully fusion for semantic segmentation.Proc AAAI Conf Artif Intell,2020,34(7):11418-11425.DOI: 10.1609/aaai.v34i07.6805.
佟雨兵, 张其善, 祁云平. 基于PSNR与SSIM联合的图像质量评价模型.中国图象图形学报, 2006,11(12): 1758-1763.TONG Y B, ZHANG Q S, QI Y P. Image quality assessing by combining PSNR with SSIM. J Image Graph, 2006,11(12): 1758-1763.
(责任编辑" 孟苗婧" 郑琰燚)
猜你喜欢
辽宁林业科技(2017年4期)2017-06-22 10:23:36
新教育时代·教师版(2016年23期)2016-12-06 06:02:38
法制与社会(2016年32期)2016-12-01 15:25:53
河北林业科技(2016年5期)2016-11-08 03:13:26
软件导刊(2016年9期)2016-11-07 22:20:49
人间(2016年26期)2016-11-03 17:52:40
中国科技博览(2016年22期)2016-11-01 18:10:31
软件工程(2016年8期)2016-10-25 15:47:34
科技视界(2016年22期)2016-10-18 14:30:27
中国土地科学(2014年5期)2014-03-01 03:25:40