
草莓移栽机控制系统设计与试验
2024-05-22 11:58胡建平刘育彤张永辉徐华岗刘伟韩绿化
中国农机化学报 2024年2期
关键词:控制系统
胡建平 刘育彤 张永辉 徐华岗 刘伟 韩绿化

摘要:針对草莓高起垄定向移栽农艺要求,设计一种机械打穴、人工识别草莓苗弓背方向后定向穴栽的移栽机。基于可编程控制器(PLC)设计整机控制系统,包括移栽机定速行走控制系统、前轮转向控制系统、打穴控制系统等任务模块。整机采用直流无刷电机作为底盘的驱动元件,根据电机自带编码器的输出值进行行走速度、栽植株距和打穴频率的协调控制,采用步进电机作为打穴机构的驱动元件,由接近开关对打穴机构进行定位,通过二者配合完成打穴过程,在人机协同作业下,完成草莓苗移栽。试验结果表明:当单行移栽效率为15株/min,株距为150 mm、200 mm、250 mm时,株距合格率、孔深合格率、孔径合格率均在95%以上,其变异系数均小于5%,打穴成功率均大于95%,符合移栽机行业标准,打穴移栽效果满足农艺要求。
关键词:草莓移栽机;控制系统;打穴机构;种植机械
中图分类号:S223.9
文献标识码:A
文章编号:20955553 (2024) 02010106
收稿日期:2022年5月26日 修回日期:2022年7月18日
基金项目:江苏省现代农机装备与技术示范推广项目(NJ2021—09)
第一作者:刘育彤,男,1996年生,甘肃天水人,硕士研究生;研究方向为农业机械。Email: 2222016041@stmail.ujs.edu.cn
通讯作者:胡建平,男,1964年生,江苏镇江人,博士,教授,博导;研究方向为农业机械。Email: hujp@ujs.edu.cn
Design and experiment on control system of strawberry transplanter
Hu Jianping1, Liu Yutong1, Zhang Yonghui2, Xu Huagang2, Liu Wei1, Han Lühua1
(1. Jiangsu University, Zhenjiang, 212013, China;
2. Jiangsu Xintian Machinery Manufacturing Co., Ltd., Zhenjiang, 212013, China)
Abstract:
Aiming at the agronomic requirements for directional transplanting of strawberries with high ridges, a transplanting machine is designed, which can make holes mechanically and manually identify the direction of the back of the strawberry seedlings. Based on PLC, the whole machine control system is designed, including the constant speed walking control system of the transplanter, the front wheel steering control system, the hole drilling control system and other task modules. The whole machine adopts a DC brushless motor as the driving element of the chassis. According to the output value of the motor's own encoder, the walking speed, the planting distance and the punching frequency of drilling are coordinated and controlled. The stepping motor is used as the driving element of the drilling mechanism. The switch positions the hole punching mechanism, and the hole punching process is completed through the cooperation of the two, and the strawberry seedling transplanting is completed under the cooperative operation of man and machine. The test results show that when the single row transplanting efficiency is 15 plants /min, with plant spacing of 150 mm, 200 mm, and 250 mm, the qualified rates of plant spacing, hole depth, and aperture are all above 95%, with a coefficient of variation of less than 5%. The success rate of hole drilling is also above 95%, which is in line with the industry standard of transplanting machine, the effect of hole drilling and transplanting meets agronomic requirements.
Keywords:
strawberry transplanter; control system; punching mechanism; planting machinery
0 引言
我国是世界上最大的草莓生产国,草莓种植面积呈现出持续增长的市场态势[12]。随着设施农业的发展,江苏地区大部分采用设施内高起垄、裸根苗的栽培模式[3];这是一种在高30 cm左右的垄上进行移栽的种植方式,具有土壤保湿性好、能够降低病虫害发生率、进一步提高产量等优点[4]。然而,因草莓移栽的复杂农艺要求:苗弓背向外、深不埋心、浅不漏根等,我国的草莓移栽仍采用人工作业为主,尤其针对高起垄、裸根苗移栽的情形,国内外市场上未见特制的草莓移栽机及相关报道[57]。目前,草莓移栽主要依靠人工,但人工栽植劳动强度大、生产效率低、移栽质量不稳定,根据果农经验,在理想状态下,单人移栽草莓苗约300株/h。
基于上述问题,本文在自主研发的草莓移栽机基础上,设计一种基于可编程控制器(PLC)的整机控制系统,以实现高效、稳定的打穴移栽目的,对该系统工作流程进行解析,并通过试验验证自研系统工作的可靠性。
1 草莓移栽机整机结构
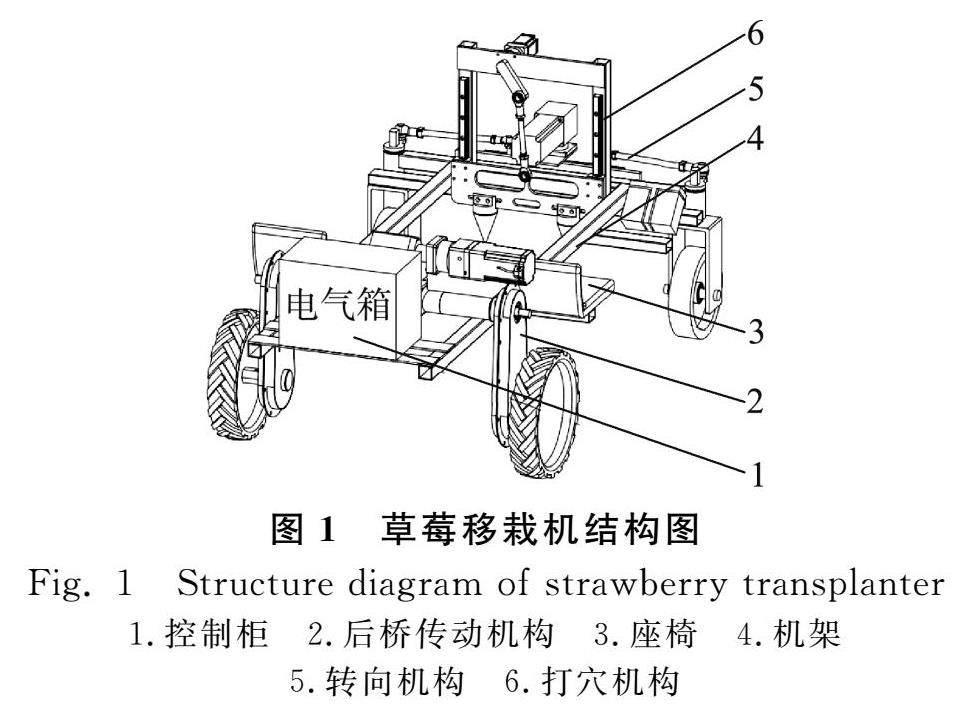
基于PLC的草莓移栽机控制系统,主要针对设施高起垄草莓裸根苗的移栽。整机由转向机构、打穴机构、后桥传动机构、机架、苗盘架及控制柜等组成,移栽机主要工作部件按照机具前进方向左右对称布置,可同时完成双行作业[8],采用人机协同方式,即自走式底盘间歇式打穴、人工识别草莓苗弓背方向后定向穴栽,从而完成草莓苗的移栽,具体结构如图1所示。
1.控制柜
2.后桥传动机构
3.座椅
4.机架
5.转向机构
6.打穴机构
整机由底盘结构、打穴结构组成,采用后轮驱动、前轮转向的设计方案。底盘采用边梁式布局形式,单电机整体驱动[9]的驱动类型,通过差速器与链传动结合的形式将动力传递至后轮。前轮转向利用阿克曼定理[1011],设计平面多连杆转向机构[12],如图2所示,通过步进电机、减速器与限位传感器,对转向机构的极限位置进行定位。打穴机构采用曲柄滑块式连杆机构驱动打穴头上下运动的方案。
工作原理:草莓移栽机采用双行作业模式、人工识别草莓苗弓背方向后定向穴栽的人机协同作业方案。按照单行移栽效率为15株/min,不同的株距要求:150 mm、200 mm、250 mm,移栽机底盘匹配不同的速度做匀速运动,打穴机构协同人工栽植速度做间歇式双行打穴,当自走式底盘前进规定株距,打穴机构动作,配合人工完成移栽作业,工作时序图如图3所示。
1.直线模块
2.齿轮齿条传动机构
3.限位块
4.转向拉杆
5.碰撞传感器
6.减速器
7.转向电机
2 整机控制系统
2.1 控制方案设计
整个控制系统以可编程控制器PLC为核心,PLC内部存储顺序控制、定时、计数等指令,通过输出数字量控制草莓移栽机运动过程[13]。控制系统以信捷XD3-32T-C为主控制器,输入信号包括:前进、后退、左转、右转方向控制信号,株距选择信号(150 mm、200 mm及250 mm),2个转向机构限位信号、1个打穴机构定位信号,急停开关信号;输出信号包括行走电机、打穴电机、转向电机方向。
控制系统工作电压分为两种,分别为48 V以及24 V,其中行走电机、打穴电机由48 V锂电池供电,打穴限位传感器、PLC、转向电机由直流电源降压器(48 V降24 V)转换得到。各驱动电机以及部件相互衔接,完成草莓移栽机的打穴过程,其中,打穴电机采用内部调速的方式,即依靠外部旋钮调节模拟量输入的方式改变电机转速;行走电机采用外部调速的方式,即通过脉宽调制技术(PWM)改变电机转速,实现打穴速度与前进速度的控制,整体控制方案如图4所示。
将执行程序导入PLC,电机驱动器受PLC直接控制[14]。底盘结构运动控制方案如下,通过控制直流无刷电机正反转实现自走式底盘的前进后退,PLC发送不同占空比的PWM,调节电机驱动器转速控制口电压实现底盘运动速度的控制;脚踏开关控制步进电机的正反转实现自走式底盘的转向控制,通过发送脉冲的频率和个数,实现转向机构的定位及转向速率的控制,两个NPN常开型光电传感器用于检测左右转向的极限位置。通过直流无刷电机为打穴结构提供力矩。为了提高草莓苗移栽合格率,启动瞬间,转向机构自复位至中心位置,打穴机构自复位至机械结构最高点位置。移栽作业过程中,每个周期底盘运动固定株距,打穴机构协调动作,通过人机协同作业完成草莓苗移栽。
2.2 硬件系统设计
草莓移栽机划分为定速行走控制系统、前轮转向控制系统、打穴控制系统等任务模块。各机构动作依靠动力元件,步进电机和直流无刷电机实现,步进电机、直流无刷电机通过对应的电机驱动器控制,电机驱动器通过PLC直接控制。为便于PLC选型和整个控制系统的程序设计,现将电机个数、种类及实现的动作进行细分。整个系统共有2种电机,直流无刷电机数量为2个,控制移栽机的行走和打穴,步进电机数量为1个,控制移栽机的转向,3个对应的电机驱动器、1个栽植启动开关、1个株距选择开关、1个前进后退选择开关、1个左转右转脚踏开关、1个急停开关、2个光电传感器、1个接近开关与信捷可编程控制器PLC一起组成草莓移栽机控制系统的硬件部分。
整体输入输出地址表及控制說明如表1所示。
常开型光电传感器、接近开关、栽植启动开关、株距选择开关、前进后退选择开关、左转右转脚踏开关、急停开关作为输入部分,电机驱动器作为输出部分,步进电机、直流无刷电机作为动力元件,驱动对应的执行部件动作。通过对整机动作的系统分析和PLC输入输出地址分配后,设计信捷PLC在草莓移栽机控制系统下的接线图如图5所示。根据表1输入输出地址分配,选用结构紧凑、可扩展性强、成本低等优点的信捷PLC,型号为XD3-32T-C作为草莓移栽机的主控制元件,它具有高速计数功能、脉冲输出功能、采用DC供电等特点。
2.3 软件设计
2.3.1 时序控制流程说明
草莓移栽机的控制系统主要由三部分组成,即:移栽机定速行走控制系统、前轮转向控制系统、打穴控制系统。本程序主要采用顺序控制、流程控制、定位控制、定时、高速计数等操作指令,实现定距打穴作业。
移栽机定速行走控制系统是为了草莓移栽机能够沿垄行走,在人机协同作业下,完成草莓苗的移栽。通过触发前进、后退信号控制行走电机转向,经过减速器、后桥传动,驱动后轮实现自走式底盘的前进与后退;前轮转向控制系统是为了草莓移栽机能够进行方向调整,左转、右转信号控制转向电机转向,经过减速器、齿轮齿条传动机构,带动转向机构实现转向。为了提高移栽效率,减少人为对方向干预,提出一种转向机构自复位回零以及自动回正的控制策略,即移栽机上电的瞬间,转向电机工作,通过机架上安装的限位传感器以及信捷PLC定位控制功能中的绝对单段定位指令,它采用目标位置相对于原点坐标位置的定位方式,属于绝对驱动方式,从而实现转向机构的自复位回零调整以及自动回正,其控制原理,将左限位传感器作为转向机构自复位第一个零点,当传感器信号触发时,给转向电机发送数目固定、方向相反脉冲,从而带动齿轮齿条传动机构,实现转向机构的自复位回零调整,同时,将此位置设为转向机构自动回正的零点,当人为对方向进行干预后,利用绝对单段定位指令,转向机构自动实现回正功能。
打穴控制系统是整个系统的主控制程序,为保证草莓移栽机能够正常工作,在移栽机上电瞬间,会进行打穴机构自复位调整,即打穴電机带动曲柄滑块机构运动,实现打穴结构子系统的定位,即曲柄停留在最高点的位置。进行草莓移栽作业时,利用信捷PLC高速计数功能,读取行走电机编码器输出脉冲量,当读取值与预设对应株距脉冲值相等时,进行打穴作业。草莓移栽机控制系统流程图,如图6所示。
1) 在整机通电瞬间,输出继电器Y5置为SET,打穴电机动作,带动曲柄滑块机构运动,直至触发接近开关,延时60 ms,曲柄达到最高点的位置,打穴结构子系统完成自复位。输出继电器Y2和Y3置为SET,转向电机动作,带动齿轮齿条传动机构运动,与限位传感器协同作用,转向机构完成自复位,上电自复位完成。
2) 转向踏板开关信号触发时,输出继电器Y3和Y4置为SET,分别触发左转、右转开关时,利用信捷PLC的可变频率脉冲输出,分别输出正脉冲频率和负脉冲频率,转向电机经过齿轮齿条传动机构,带动转向机构实现转向功能。当触发左右两边的限位传感器时,输出继电器Y3停止发送脉冲,转向电机停止动作;当转向踏板开关下降沿信号触发时,输出继电器Y3停止发送脉冲,此时,利用信捷PLC的绝对单段定位指令,控制转向电机,带动转向机构,重新回到零点位置。
3) 前进后退信号触发时,输出继电器Y1或Y2置为SET,控制行走电机转向,没有启动栽植按钮时,输出继电器Y0发送大占空比的PWM,此时行走速度较快,经过减速器、后桥传动,驱动后轮实现自走式底盘的前进和后退。
4) 启动栽植按钮时,根据不同的株距要求以及15株/min的单行移栽效率,输出继电器Y0发送不同占空比的PWM,匹配不同株距下的速度。利用信捷PLC的高速计数功能,读取行走电机编码器输出脉冲量,将不同株距对应脉冲量与读取编码器值进行比较,满足条件时,进行打穴作业。
2.3.2 打穴自复位程序
本控制系统采用信捷PLC编程控制软件进行程序的编写,采用编程语言为梯形图形式,其中打穴机构上电自复位控制程序如图7所示。移栽机上电时,输出端Y5所控制的打穴电机带动曲柄滑块机构开始运动,为了抵消打穴机构的运动惯性,使打穴机构曲柄停在最高点的位置,在最高点的下方安装一个接近开关,当触发接近开关信号时,经过一个60 ms的延时,打穴机构就可以实现上电自复位功能。程序编写完成后,先检查程序是否正确,然后连接硬件,控制样机空载并进行调试。
3 试验与分析
3.1 试验条件
试验于2021年9月19日在镇江市句容白兔镇草莓种植园区进行。起垄规格为垄高30 cm,垄底宽50~60 cm,垄顶宽45 cm,垄沟宽28~35 cm,满足试验要求。试验设备包括草莓移栽机、游标卡尺(量程200 mm,精度0.02 mm)、常规卷尺(量程5 m)、秒表等。试验材料:草莓裸根苗,培育时间8周左右,经测量100组草莓裸苗根系的平均长度,符合正态分布,70~100 mm之间的占95.4%。
3.2 试验方案
为验证草莓移栽机打穴合格率,采用单因素三水平全析因试验,试验因子为打穴合格率,试验水平为150 mm、200 mm、250 mm,试验响应为株距合格率、孔径合格率、孔深合格率。依照中华人民共和国机械行业标准(JB/T 10291—2013)[15],测量株距、孔径、孔深数据以合格率作为测试指标,并计算相应的变异系数[16]。
1) 株距合格率:设理论间距为Lr,测量相邻两孔间距Li,若0.8Lr 2) 孔径合格率:设理论孔径为Dr,测量穴孔端面直径Di,若0.8Dr 3) 孔深合格率:根据相关标准要求,穴孔的深度范围在理论打穴深度的±10 mm内认为孔径合格,取理论穴孔深度为85 mm。将合格孔径样本与样本总数的比值作为株距合格率。孔深变异系数定义为:在一定的栽植区间内所测得的实际孔深的标准偏差与平均值的百分比。孔深合格率、孔深的变异系数是对穴形均匀度的评价。 X-=∑ni=1Xin (1) SX=1(n-1)∑ni=1(Xi-X-)2 (2) CVX=SXX-×100% (3) 式中: n——实测钵苗数,株; CVX——变异系数,%; SX——标准差; X-——平均值,mm; Xi——合格株距(i=1,2,…,n),mm。 4) 打穴合格率:打穴合格是指移栽机打穴后穴孔株距、孔径、孔深都合格,其合格率指实测穴孔合格株数与实测穴孔株数的百分比。 P=NAN×100% (4) 式中: NA——合格株数,株; N——测定的总株数,株。 为保证试验精度,试验3次,每组试验20次,取平均值。 3.3 试验结果与分析 如表2~表5所示,当单行移栽效率为15株/min,理论株距为150 mm时,株距合格率为98.62%,株距变异系数为3.05,孔径合格率为98.56%,孔径变异系数为1.82,孔深合格率为97.74%,孔深变异系数为1.48,打穴成功率为96.46%;理论株距为200 mm时,株距合格率为98.62%,株距变异系数为3.05,孔径合格率为97.66%,孔径变异系数为1.57,孔深合格率为98.46%,孔深变異系数为1.37,打穴成功率为95.88%;理论株距为250 mm时,株距合格率为96.10%,株距变异系数为1.76,孔径合格率为97.24%,孔径变异系数为2.41,孔深合格率为97.22%,孔深变异系数为1.35,打穴成功率为95.26%。根据机械行业标准(JB/T 10291—2013)中移栽机性能指标,不同株距下,株距变异系数均小于20%,孔深合格率均大于75%,机构运行稳定、株距差异小;打穴成功率、孔径合格率均大于95%,孔径变异系数均小于20%;成型孔的质量较好,符合行业标准,能够满足草莓移栽需求。 综上分析可知,当单行移栽效率为15株/min,栽植株距分别为150 mm、200 mm、250 mm时,株距合格率、孔深合格率、孔径合格率均在95%以上,株距变异系数均小于5%,打穴成功率均在95%以上,同时试验中发现:(1)由于打穴机构采用曲柄滑块机构,质量大、运动时惯性大,造成曲柄停在最高点的位置不准确;(2)孔深不同造成实际株距与理论株距之间存在一定偏差;(3)移栽机前进速度与打穴速度的合速度方向与竖直方向存在夹角,导致了实际孔径数据与理论孔径数据之间存在一定的偏差;设施内草莓移栽环境恶劣,移栽机会在凹凸不平的田地产生打滑现象。根据机械行业标准(JB/T 10291—2013)中移栽机性能指标,试验值均大于指标值,符合栽植要求。 4 结论 1) 本研究结合自主研发的草莓移栽机,设计了一种基于PLC的草莓移栽机控制系统,该控制系统由定速行走、前轮转向、打穴控制系统等任务模块组成,可实现草莓移栽机打穴机构自动定位、转向机构自动回零、等株距打穴等流程,通过机器打穴匹配人工识别草莓苗弓背后定向穴栽的方式完成草莓苗移栽作业,提高草莓移栽工作效率。 2) 采用单因素试验法,进行草莓移栽机田间试验,其中试验因子为打穴合格率,试验水平为150 mm、200 mm、250 mm,试验响应为株距合格率、孔径合格率、孔深合格率。结果表明:当单行移栽效率为15株/min时,株距合格率、孔深合格率、孔径合格率均在95%以上,其变异系数均小于5%,打穴成功率均在95%以上;整个系统达到了旱地裸根苗作物的移栽要求,且结构简单、可靠程度高。 参 考 文 献 [1]农业农村部. 2017年全国各地蔬菜、瓜果(西瓜、甜瓜、草莓等)、马铃薯播种面积和产量[J]. 中国蔬菜, 2019, 1(11): 22. [2]Faller I. Strawberriesfrom planting to the punnet: A commodity chain analysis of two farms in the Magaliesberg [M]. University of Johannesburg (South Africa), 2015. [3]李廷泽. 大棚草莓高产高效种植关键技术分析[J]. 农家参谋, 2020(8): 129. [4]金丽. 大连金普新区草莓高起垄单行与高起垄双行种植比较[J]. 农家致富顾问, 2017(6): 2. [5]胡建平, 岳仁才, 武东东, 等. 草莓移栽机的发展现状与展望[J]. 农业装备技术, 2020, 46(1): 7-10. [6]Han L, Mao H, Hu J, et al. Development of a doorframetyped swinging seedling pickup device for automatic field transplantation [J]. Spanish Journal of Agricultural Research, 2015, 13(2): e0210-e0210. [7]周童. 高垄双行草莓穴盘苗全自动移栽机的研发与试验[D]. 镇江: 江苏大学, 2019. Zhou Tong. Research and experiment of highridge automatic transplanter for doublerow strawberry plug seedlings [D]. Zhenjiang: Jiangsu University, 2019. [8]石铁. 全自动玉米秧苗移栽机的研制与试验[J]. 农业工程学报, 2015, 31(3): 23-30. Shi Tie. Development and test of automatic corn seedling transplanter [J]. Transactions of the Chinese Society of Agricultural Engineering, 2015, 31(3): 23-30. [9](美)侯賽因. 纯电动及混合动力汽车设计基础[M]. 北京: 机械工业出版社, 2012. [10]申川川. 基于阿克曼转向角在四驱电动汽车中的运用分析[J]. 时代汽车, 2018(4): 83-84. [11]Qiu Q, Fan Z, Meng Z, et al. Extended ackerman steering principle for the coordinated movement control of a four wheel drive agricultural mobile robot [J]. Computers and Electronics in Agriculture, 2018, 152: 40-50. [12]刘佳佳, 姜林. 车辆的转向机构及具有该转向机构的车辆[P]. 中国专利: CN201510847831.7, 2017-6-9. [13]李业刚. 基于PLC控制的工业自动化技术研究[J]. 山东农业工程学院学报, 2020, 37(2): 39-40. Li Yegang. Research on industrial automation technology based on PLC control [J]. The Journal of Shandong Agriculture and Engineering University, 2020, 37(2): 39-40. [14]张靖辉. 基于PLC的永磁无刷直流电机调速控制研究[J]. 长春教育学院学报, 2015, 31(2): 53-54. [15]JB/T 1029—2013, 旱地栽植机械标准[S]. [16]封俊, 顾世康, 曾爱军, 等. 导苗管式栽植机的试验研究(Ⅱ)栽植机的性能评价指标与检测方法[J]. 农业工程学报, 1998(2): 79-83. Feng Jun, Gu Shikang, Zeng Aijun, et al. Study on transplanter with chute and seedling aid springs (PartⅡ) judging targets system for transplanters [J]. Transactions of the Chinese Society of Agricultural Engineering, 1998(2): 79-83.
猜你喜欢
科技创新导报(2016年20期)2016-12-14科技创新导报(2016年20期)2016-12-14科学与财富(2016年26期)2016-12-01科学与财富(2016年26期)2016-12-01演艺科技(2016年10期)2016-11-26考试周刊(2016年88期)2016-11-24科教导刊·电子版(2016年26期)2016-11-21数字技术与应用(2016年9期)2016-11-09科技视界(2015年25期)2015-09-01
