无人机遥感监测果树氮素含量研究进展
2024-05-22 02:58:15陈鲁威曾锦袁全春潘健姚凤腾吕晓兰
中国农机化学报 2024年2期
陈鲁威 曾锦 袁全春 潘健 姚凤腾 吕晓兰


摘要:氮素是果樹生长发育不可或缺的成分,氮素含量超出正常范围会影响树体生长发育,会直接或间接降低果实产量及品质。快速准确掌握果树氮素含量,可为精准施肥提供技术支撑,从而达到果树的优质丰产。随着无人机产业的快速发展,无人机遥感监测以其无损、快速、实时、高效等优点在氮素含量监测中发挥着重要作用。在介绍目前主流无人机的基础上,梳理数据获取及后续处理方式,阐述多光谱、高光谱、可见光以及其他类型传感器实现果树氮素含量监测研究现状。可以发现,多光谱和高光谱传感器对果树氮素监测效果更佳,且使用机器学习方法构建模型相较于传统方法具有更高精度。提出无人机遥感监测果树氮素含量在无人机飞行平台与传感器性能、数据获取与处理、推广与应用及政策4个方面现阶段存在的不足之处和未来精准化、高效化和智能化的发展方向。
关键词:无人机;遥感;果树;氮素含量;机器学习
中图分类号:S252
文献标识码:A
文章编号:20955553 (2024) 02023509
收稿日期:2022年7月11日 修回日期:2022年9月15日
基金项目:国家梨产业技术体系(CARS—28);江苏省农业自主创新资金项目(CX(21)2005);亚夫科技服务项目(KF(22)1014)
第一作者:陈鲁威,男,1997年生,江苏新沂人,硕士研究生;研究方向为智能农业装备与计算机视觉。Email: justchenlw@163.com
通讯作者:姚凤腾,男,1966年生,江苏泗洪人,硕士,副研究员;研究方向为果园管理技术与装备。Email: 394866267@qq.com
Research progress on monitoring nitrogen content of fruit trees by UAV remote sensing
Chen Luwei1, 2, Zeng Jin1, 3, Yuan Quanchun1, 3, Pan Jian1, 4, Yao Fengteng1, 3, Lü Xiaolan1, 3
(1. Institute of Agricultural Facilities and Equipment, Jiangsu Academy of Agricultural Science, Nanjing, 210014, China;
2. School of Agricultural Engineering, Jiangsu University, Zhenjiang, 212013, China; 3. Key Laboratory of
Horticultural Crops and Agricultural Equipment, Ministry of Agriculture and Rural Areas, Nanjing, 210014, China;
4. School of Mechanical and Electronic Engineering, Nanjing Forestry University, Nanjing, 210037, China)
Abstract:
Nitrogen is an indispensable component for the growth and development of fruit trees. Nitrogen content beyond the normal range will affect the growth and development of trees, and directly or indirectly reduce the yield and quality of fruits. Therefore, rapid and accurate grasp of the nitrogen content of fruit trees can provide technical support for precise fertilization, so as to achieve high quality and high yield of fruit trees. With the rapid development of UAV industry, UAV remote sensing monitoring plays an important role in nitrogen content monitoring because of its advantages of nondestructive, fast, realtime and high efficiency. On the basis of introducing the current mainstream UAVs, this paper combs the data acquisition and subsequent processing methods, and expounds the monitoring of nitrogen content in fruit trees by multispectral, hyperspectral, visible light and other types of sensors. In general, multispectral and hyperspectral sensors have better effect on nitrogen monitoring of fruit trees, and the model constructed by machine learning method has higher accuracy than traditional methods. Finally, the deficiencies and future development direction of UAV remote sensing monitoring of fruit tree nitrogen content in four aspects of UAV flight platform and sensor performance, data acquisition and processing, promotion and application, and use policy were put forward, so as to provide reference for the accuracy, efficiency and intelligence of UAV remote sensing monitoring of fruit tree nitrogen content in China.
Keywords:
UAV; remote sensing; fruit tree; nitrogen content; machine learning
0 引言
氮素是影响果树生长发育最重要的元素之一,缺氮时易导致其生长缓慢,茎叶枝果等受到较大影响,果实品质和产量都将下降。而果树氮素过多时,容易徒长枝叶,部分果树会贪青,其果实易延迟成熟,产量也容易下降[1]。如何准确、高效和实时地监测果树氮素含量,最大程度上改善果实品质和提高果树产量是当前研究的重点问题之一。目前,果树氮素含量监测主要依靠人工观测,但是其具有主观性和局限性。且因人工实地观测显现出的覆盖面积小、耗时长、工作强度高、准确率低和时效性差等问题,使得监测果树氮素的任务受到较大的限制,而无法及时和准确的监测果树氮素含量,往往导致大量氮肥的浪费[2]。
遥感技术是指通过卫星、飞机或其他飞行器及地面其他平台搭载的各种传感器,非接触式地获取目标物辐射特征或者反射出的电磁波信息[3]。在果树氮素含量监测领域,由于遥感技术的快速、准确、无损和覆盖度大等优势,使得其应用越来越广泛。当前,遥感监测主要通过卫星、飞机和地面监测站等方式实现[4]。卫星监测容易受大气和云层等环境因素干扰且空间分辨率低,地面监测站监测的区域面积较小、效率较低且成本较高[5]。而无人机(Unmanned Aerial Vehicle, UAV)具有遥感监测覆盖区域大、效率高、成本较低等优点,根据无人机搭载不同传感器进行遥感可以获得不同类型的数据,如搭载高光谱成像仪,可以获取更多的光谱频段、更高的光谱分辨率[6]。因此,在果树氮素含量监测领域中,无人机遥感得以广泛地应用。现今,智慧农业逐渐成为时代发展的趋势,无人机与遥感技术结合是促进农业生产精准化和高效化的有效方式,将对农业生产领域产生较为深远的影响[79]。
本文首先对无人机遥感监测果树氮素含量的相关背景、数据获取方式和流程、数据处理流程和方法等方面进行了概述;然后从多光谱、高光谱、可见光以及其他类型传感器进行阐述,分析了国内外无人机遥感监测氮素含量的研究进展;最后提出了目前无人机遥感监测氮素含量仍然存在的不足之处和未来的发展方向。
1 获取数据的方式
1.1 无人机飞行平台的选择
无人机种类繁多,按照飞行平台构型分类一般可分为固定翼、单旋翼、多旋翼和混合翼等,根据作业任务的不同,需要选择的参数也不尽相同[1011]。在使用无人机遥感监测果树氮素时,一般根据作业任务区域面积、工作负载和精度大小等进行选取不同参数的无人机。表1为多种无人机飞行平台的相关参数以及优缺点。
综合考虑飞行区域面积、性能参数及其造价成本,目前多旋翼无人机以其稳定性较高、起降方便和造价成本适中等优势在遥感监测果树氮素中应用较多。
1.2 无人机飞行参数对不同传感器的影响
无人机飞行参数的差异对探测装置即获取数据的传感器具有一定的影响,通常需要关注的飞行参数主要包括飞行高度、飞行速度、飞行时间、最大负载、抗风能力等,表2为无人机飞行参数对不同传感器的影响。
1.3 无人机遥感搭载传感器类型及特点
无人机遥感获取不同类型的数据,需要通过搭载相应类型的传感器。
目前搭载在无人机上的传感器主要有可见光成像设备(如:数码相机)、多光谱仪、高光谱仪、热成像仪、激光雷达等。不同传感器获取的数据类型各有优劣,表3对相关传感器类型的特点以及应用场景进行阐释。
2 数据获取和处理技术
2.1 数据获取流程
无人机遥感监测果树氮素含量的数据获取流程的安全性、规范性和时效性对于获取数据的数量和质量具有重要意义,其对后续数据的处理及分析有很大的影响,是保证数据处理分析结果可靠的重要前提。目前,国内外无人机遥感监测果树氮素含量的数據获取流程较为相似,一般包括飞行计划制订、飞行前准备、正式飞行以及飞行结束处理。图1对该流程进行了较为详细的阐释。
2.2 数据处理流程
现阶段,利用无人机遥感监测果树氮素含量的数据处理流程无显著差异,一般分为数据格式转换、图像拼接、图像裁切、图像矫正、特征提取、构造模型、精度分析等,如图2所示。
无人机获取的遥感影像一般需要经过预处理才能进行后续操作,对于数据格式转换,一般与机载传感器配套的软件使用,而进行拼接和矫正等预处理,需要使用相关的测绘摄影处理软件如:ENVI、Photo scan、ArcGIS、Pix4D Mapper等。
由于无人机遥感监测需要处理的数据量庞大,以往的通讯技术难以为在线监测与数据处理提供通讯保障。近年来,随着5G技术的发展,为数据在线处理与监测提供了技术支撑,图3为无人机遥感在线监测与数据处理流程及方法。
2.3 数据处理方法
无人机遥感监测果树氮素含量的原始数据完成预处理后,后续需要进行的步骤一般为特征信息提取和模型构建。
2.3.1 数据的特征信息提取
与正常果树相比,果树缺氮时其颜色特征、光谱特征、纹理特征、空间特征等都可能会表现出差异[16],基于这些特征差异进行数据处理是无人机遥感监测氮素含量的重要前提。
目前,在遥感监测果树氮素的数据特征信息提取方面,常用的特征主要为光谱特征和颜色特征。如表4所示,为上述两种特征信息提取的方式及优缺点。光谱特征一般通过无人机搭载多光谱或者高光谱传感器获取果树的光谱反射率。果树缺氮时,其叶片的蛋白质、叶绿素相比正常果树具有明显差异,根据缺氮程度的不同,此时果树光谱反射率也会发生不同的变化[17]。想要研究出氮素含量与光谱特征之间的变化关系,通常采用筛选敏感波段、波段组合以及构建植被指数(Vegetation Index,VI)等方法降低特征提取的误差,以提升氮素监测模型的精度。颜色特征主要通过无人机搭载数码相机拍摄果树图片获取。果树缺氮后其蛋白质和叶绿素含量往往会降低,导致其表型颜色特征发生变化。通常将获取到的颜色图像RGB分量进行数学运算得到不同的颜色指数,再将不同的颜色指数进行分别构建模型对比,以分析出对该果树最敏感的颜色指数,从而提高果树氮素监测准确率。
在数据特征提取分析方面,光谱波段较多时主要采用主成分分析(Principal Component Analysis,PCA)和连续投影算法(Successive Projections Algorithm,SPA)等方法。波段较少时,往往通过波段进行组合运算的方法构建VI。而红外热成像仪和激光雷达等传感器获取的数据类型单一,可以直接获取果树的特征信息数据。
2.3.2 模型构建
氮素监测模型质量的差异直接决定了监测果树氮素含量的准确性,而在相同数据的前提下,采用不同方法构建出的模型,其效果往往有所差异。目前,构建监测氮素含量的模型一般包括传统的统计分析方法和机器学习方法。表5为三类构建模型方法的主要特点。
利用传统的统计分析方法进行构建模型经常采用线性回归方法。机器学习方法构建的氮素监测模型主要采用传统的机器学习和深度学习方法,传统的机器学习方法主要包含随机森林(Random forest,RF)、支持向量机(Support Vector Machine, SVM)、决策树(Decision Tree)、k-近邻(kNearest Neighbor,KNN)等,常用的深度学习方法主要为深度神经网络(Deep Neural Networks,DNN)、卷积神经网络(Convolutional Neural Networks,CNN)和反向传播神经网络(Backpropagation Neural Network,BPNN)等。近年来,随着人工智能的快速发展、数据量的大幅增加和算力的逐年递增,无人机遥感监测氮素含量的模型构建使用传统的统计分析方法和传统的机器学习方法应用研究逐渐减少,而使用深度学习方法越来越广泛。
3 不同传感器监测果树氮素含量方法
目前,无人机遥感监测果树氮素含量主要通过搭载多光谱、高光谱及可见光成像设备等传感器获取数据。
3.1 多光谱遥感的监测方法
无人机多光谱数据的获取依靠两个以上的波谱通道传感器,将拍摄的目标划分为多个光谱波段的影像进行多次提取。现阶段,利用无人机遥感监测氮素含量使用的多光谱传感器多为2~5个波段,较常用的5个波段分别为红边、近红外、红光、绿光和蓝光。在对果树进行氮素监测模型反演时常常将不同波段进行数学运算得到不同的VI,再将VI与地面人工获取的氮素实际值进行反演从而预测出果树氮素含量。目前,在氮素监测方面运用较多的VI如表6所示。在进行统计分析时,基于多种VI,主要通过指数统计相关性、方差分析、线性回归等方法分别在不同时期找出最为敏感的相关VI,并通过一元或多元线性回归等反演模型构建方法,较为准确地完成了对于荔枝[18]、柑橘[19]、梨树[20]等果树的氮素含量监测。但是,线性回归方法往往具有一定的局限性,对于数据复杂,或者多项式回归难以完成模型构建。因此,采用机器学习的方法建模研究和应用得以广泛使用。有部分专家学者通过建立或优化不同的机器学习方法如RF、SVM、XGBoost、二次判别分析(Quadratic Discriminant Analysis,QDA)等进行葡萄、柑橘等果树氮素含量监测的反演模型构建。同一种机器学习方法对于不同果树或者果树的不同时期表现出来的差异较大,如Prado等[21]采用多种机器学习方法对柑橘树进行氮素含量预测,发现采用RF方法构建的模型具有更高的精度。而Moghimi等[22]使用多种机器学习方法对葡萄藤进行氮素含量预测,发现XGBoost具有更佳的效果。也有部分研究者将传统的回归方法、传统的机器学习方法和机器学习中的深度学习等方法进行对比分析,发现机器学习中的深度学习方法常常拥有更好的效果。如Noguera等[23]利用偏最小二乘(Partial least squares regression,PLS)回归、高斯过程回归(Gaussian Process Regression, GPR)、SVM和人工神经网络(Artificial Neural Network,ANN)等多种方法对橄榄氮素含量进行建模分析,发现ANN的方法获得了最好的结果。综上所述,基于机器学习方法构建的氮素监测模型相较于传统的回归模型普遍具有更小的误差和更高的精度。
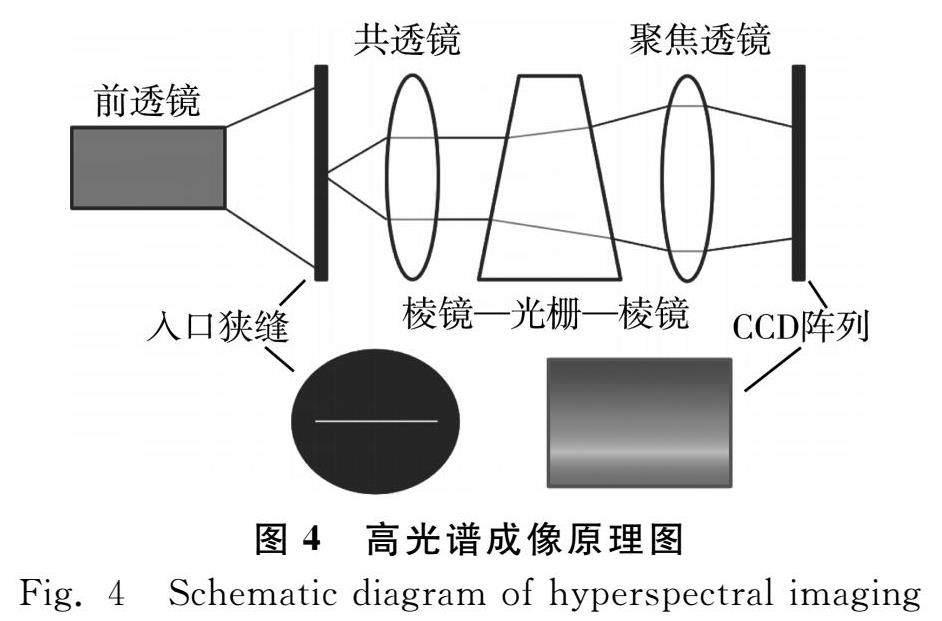
3.2 高光谱遥感的监测方法
无人机高光谱的波段数量远多于多光谱,其原理如图4所示,并且波段连续,分辨率高,其拥有的丰富数据信息为筛选出更多的特征波段提供了可能[2425]。现阶段,用于监测氮素含量的高光谱波段范围主要为400~1 000 nm,由于可选波段数量较多,依据特征波段构造的VI也就更加丰富,针对不同果树和不同时期的光谱敏感波段的差异化具有更强的普适性。如表7所示,为高光谱不同数据源构建模型的方法及优缺点。由于高光谱波段数量较多,直接将敏感波段的光谱反射率和氮素含量关联进行构建模型。
杨福芹等[26]直接利用原始的敏感波段光谱反射率对苹果氮素含量进行建模,建模效果较好,但验证效果很差,随后利用敏感波段的光谱反射率的一阶微分进行建模,发现预测模型效果更好。相较于多光谱,高光谱拥有的连续且丰富的波段可以进行重构相关VI来提高氮素含量监测准确率。如王鑫梅等[27]通过无人机高光谱筛选出9种对于核桃冠层氮素含量敏感的光谱参数,并以重构的NDVI(986.4 nm和697 nm)监测核桃林地冠层氮素含量,发现其精度更高。在构建氮素监测模型的方法上,常用的有多元线性逐步回归、PLS回归、RF、SVM、BPNN等,较多研究者发现基于机器学习算法构建的氮素监测模型往往优于传统的方法。如田中宇等[28]利用无人机高光谱遥感对苹果树冠层氮素含量预测,基于敏感波段和VI分别使用多元线性回归、RF和SVM算法进行模型构建,发现基于VI,且采用RF算法进行构造模型具有更高的精度。
3.3 可见光成像遥感的监测方法
可见光成像的波段分为红、绿和蓝三种波段,相较于多光谱和高光谱,波段更少,可提供的数据信息较少。现阶段,无人机搭载可见光传感器如数码相机和RGB传感器进行可见光遥感监测氮素已有一些研究。由于成像数据仅有红、绿、蓝三种波段,所以其成本低、成像快且处理方便,但是由于波段数量的限制,仅可以将图像的RGB三个波段进行组合数学运算,难以将多种波段进行组合运算形成各种VI,进行对比分析,其建模精度可能存在一定影响。表8所示为常见的颜色指数,其中Rblue为蓝波段。然而,无人机遥感搭载可见光传感器在一些果树上进行氮素含量监测依然取得了较好的效果。如权泽堃等[29]使用无人机搭载数码相机拍摄多个时期的苹果树冠层进行氮含量检测,提取苹果树冠的色彩特征和新梢叶片图像的形态特征,并使用多项式回归、SVM和ANN方法构建模型,发现模型预测的准确性较好。然而,无人机遥感搭载可见光设备监测果树氮素含量的相關研究较少,对于其他果树氮素含量监测的准确性有待进一步研究和验证。
3.4 其他傳感器遥感的监测方法
目前,无人机遥感监测搭载的其他传感器主要为激光雷达和红外热成像仪。然而红外热成像仪对于果树的温度差异敏感性高[30],在其他方面具有局限性,在通过无人机搭载红外热成像传感器监测氮素方面鲜有报道。激光雷达可以提取各种果树的冠层信息,如果树的密度、高度和生物量等信息[3132]。但是由于激光雷达的模型构建也存在一定的局限性,使用此类传感器进行果树氮素含量监测的相关研究较少,监测模型的准确率有待改进。但是也有研究者发现使用激光雷达和其他传感器相比各有优劣,如Shendryk等[33]使用无人机遥感搭载激光雷达和多光谱传感器监测甘蔗叶片氮素含量,通过对比两种传感器对于甘蔗叶片氮素含量预测的准确性,发现在不同时期多光谱和激光雷达的准确率各有优势。目前,采用激光雷达监测果树氮素含量取得的成果较少,多种果树尚无研究,相关的模型准确率有待进一步探究。
4 展望
现阶段,无人机遥感监测果树氮素含量的相关研究与应用尚未成熟,在无人机飞行平台与传感器的性能、数据获取与处理、推广与应用和使用政策上仍有许多的不足之处和发展空间。
4.1 无人机飞行平台与传感器性能
现阶段,无人机遥感监测飞行平台在空中作业时容易受到外界环境如风力因素的干扰,造成飞行或悬停不稳定,这将导致成像质量受到较大的影响。除此以外,由于无人机飞行平台需要搭载传感器获取数据,而传感器重量较大、拍摄单张光谱图像时间长如搭载高光谱仪将会导致空中作业续航时间大大缩短。未来,开发出飞行稳定、抗风能力强、负载能力高、续航时间长的无人机和重量较轻的、获取光谱图像更快的传感器对于获取高质量的数据具有重要意义。
4.2 数据获取与处理
获取原始数据的困难之处主要是对于天气条件要求较高,一般需要微风和晴朗的天气及合适的太阳高度角,想要在不同日期连续且多次地获取数据将受到较大的限制[34]。除此以外,为了获取的原始数据更加准确,需要将反射校准板等校准设备一并携带。野外环境复杂,校准板容易受到污染,这对于校准板的使用将受到较大的挑战,且因校准板的误差可能导致数据获取准确性下降。另外,现阶段无人机负载能力一般且传感器的质量较大,往往只能携带单一的传感器,这就导致数据源比较单一,获取数据信息不够丰富。未来,减小数据获取的难度、增加数据获取的准确性和提高数据种类的多样性将使得无人机遥感监测氮素含量应用越来越广泛。
无人机遥感数据的处理步骤较为烦琐,需要借助特定软件和算法处理。由于数据量较大,不同的处理步骤需要切换各种软件,而软件对于数据的兼容存在一定问题,且没有批量化自动处理的功能,处理数据需要耗费大量的时间,获取的数据无法及时处理完毕,处理数据的滞后性致使无法及时获取果树的氮素含量信息,对于果树及时地精准施肥造成了一定的影响,可能会导致果实的产量和品质降低。未来,开发出兼容性更高、功能体系齐全、批量化自动处理和基于5G通讯网络无线传输的软件及算法,对于无人机遥感监测氮素含量的及时性和高效性具有重要的意义。
4.3 推广与应用
现阶段无人机及传感器价格较高,操作无人机及相关的数据处理较为烦琐,对无人机飞行环境具有较高的要求,模型时效性和普适性较差,导致无人机遥感监测果树氮素含量难以进行推广与应用。未来减小无人机及传感器成本,无人机飞行及数据处理实现自动化和智能化,且构建出不同果树的多个时期的模型以增加其普适性,将使得无人机遥感监测果树氮素含量的推广与应用成为可能。
4.4 使用政策
当前,我国的空域是受到管制的,包括民航航线也都是由空军给与划拨的,所以无人机在飞行之前需要进行报备申请空域,且飞手需要通过无人机执照考试,通过审批后才能进行无人机飞行作业。飞行前准备流程较多可能会耽搁最佳飞行时间,导致无法获取高质量数据。未来简化飞行前报备流程,对于无人机获取数据的时效性和准确性具有一定的意义。
参 考 文 献
[1]赵静, 韩甜甜, 张鲜鲜, 等. 应用数码图像技术对梨树叶片营养诊断的初探[J]. 中国农学通报, 2011, 27(13):272-276.
Zhao Jing, Han Tiantian, Zhang Xianxian, et al. Preliminary study of whangkeumbae leaf nutrients status diagnosis by using digital image processing technique [J]. Chinese Agricultural Science Bulletin, 2011, 27(13): 272-276.
[2]王栋. 冀中桃园优质高产的营养诊断技术研究[D]. 保定: 河北农业大学, 2021.
Wang Dong. Study on nutrition diagnosis technology for high quality and yield of peach [D]. Baoding: Hebei Agricultural University, 2021.
[3]魏丽红, 翟秋喜. 猕猴桃缺素症叶片诊断[J]. 北方园艺, 2015(2): 170-174.
Wei Lihong, Zhai Qiuxi. Leaf diagnosis for kiwifruit deficiency disease [J]. Northern Horticulture, 2015(2): 170-174.
[4]李俊豪, 解斌, 李六林. 桃氮素营养及高效利用技术研究进展[J]. 中国果树, 2020(5): 8-12.
Li Junhao, Xie Bin, Li Liulin. Research advance in nitrogen nutrition and efficient utilization of peach [J]. China Fruits, 2020(5): 8-12.
[5]何雪菲, 黄战, 马泽跃, 等. 库尔勒香梨树在不同生育期的氮肥利用率[J]. 经济林研究, 2020, 38(4): 134-142.
He Xuefei, Huang Zhan, Ma Zeyue, et al. Nitrogen utilization rate of Korla fragrant pear trees in different growth periods [J]. Nonwood Forest Research, 2020, 38(4): 134-142.
[2]李佳佳, 杨再强. 高温胁迫下番茄临界氮模型的建立及氮素营养诊断[J]. 中国农业气象, 2021, 42(1): 44-55.
Li Jiajia, Yang Zaiqiang. Establishment of critical nitrogen model and nitrogen nutrition diagnosis of tomato under high temperature stress [J]. Chinese Journal of Agrometeorology, 2021, 42(1): 44-55.
[3]郭静霞, 张明旭, 王聪聪, 等. 遥感技术在药用植物资源中的应用研究[J]. 中国中药杂志, 2021, 46(18): 4689-4696.
Guo Jingxia, Zhang Mingxu, Wang Congcong, et al. Application of remote sensing technology in medicinal plant resources [J]. China Journal of Chinese Materia Medica, 2021, 46(18): 4689-4696.
[4]孙中宇, 陈燕乔, 杨龙, 等. 轻小型无人机低空遥感及其在生态学中的应用进展[J]. 应用生态学报, 2017, 28(2): 528-536.
Sun Zhongyu, Chen Yanqiao, Yang Long, et al. Small unmanned aerial vehicles for lowaltitude remote sensing and its application progress in ecology [J]. Chinese Journal of Applied Ecology, 2017, 28(2): 528-536.
[5]Weiss M, Jacob F, Duveiller G. Remote sensing for agricultural applications: A metareview [J]. Remote Sensing of Environment, 2020, 236: 111402.
[6]Osco L P, Marcato J, Ramos A P M, et al. A review on deep learning in UAV remote sensing [J]. International Journal of Applied Earth Observation and Geoinformation, 2021, 102: 102456.
[11]金伟, 葛宏立, 杜华强, 等. 无人机遥感发展与应用概况[J]. 遥感信息, 2009(1): 88-92.
Jing Wei, Ge Jinli, Du Huaqiang, et al. A review on unmanned aerial vehicle remote sensing and Its application [J]. Remote Sensing Information, 2009(1): 88-92.
[7]尹欣繁, 车兵辉, 章贵川, 等. 小型旋翼无人机建模及航线控制研究[J]. 火力与指挥控制, 2022, 47(2): 140-145.
Yin Xinfan, Che Binghui, Zhang Guichuan, et al. Research on modeling and route control of smallscale rotor UAV [J]. Fire Control & Command Control, 2022, 47(2): 140-145.
[13]何勇, 张艳超. 农用无人机现状与发展趋势[J]. 现代农机, 2014(1): 1-5.
[8]马梁, 苟于涛, 雷涛, 等. 基于多尺度特征融合的遙感图像小目标检测[J]. 光电工程, 2022, 49(4): 49-65.
Ma Liang, Gou Yutao, Lei Tao, et al. Small object detection based on multiscale feature fusion using remote sensing images [J]. OptoElectronic Engineering, 2022, 49(4): 49-65.
[15]刘光辉. 低空无人机探测技术的发展前景与趋势[J]. 现代雷达, 2022, 44(4): 99-100.
[9]雷剑. 轻小型无人机遥感在精准农业中的应用研究[J]. 农业与技术, 2022, 42(3): 41-43.
[10]刘琳, 郑兴明, 姜涛, 等. 无人机遥感植被覆盖度提取方法研究综述[J]. 东北师大学报(自然科学版), 2021, 53(4): 151-160.
Liu Lin, Zheng Xingming, Jiang Tao, et al. Extraction method of fractional vegetation cover from unmanned aerial vehicle remote sensing: A review [J]. Journal of Northeast Normal University(Natural Science Edition), 2021, 53(4): 151-160.
[11]王娟, 陈永富, 陈巧, 等. 基于无人机遥感的森林参数信息提取研究进展[J]. 林业资源管理, 2020(5): 144-151.
Wang Juan, Chen Yongfu, Chen Qiao, et al. Research on forest parameter information extraction progress driven by UAV remote sensing technology [J]. Forest Resources Management, 2020(5): 144-151.
[12]王彥宇. 基于固定翼无人机的水稻长势无损监测研究[D]. 南京: 南京农业大学, 2019.
Wang Yanyu. Rice growth monitoring based on a fixedwing unmanned aerial vehicle platform [D]. Nanjing: Nanjing Agricultural University, 2019.
[13]Sugiura R, Noguchi N, Ishii K. Remotesensing technology for vegetation monitoring using an unmanned helicopter [J]. Biosystems Engineering, 2005, 90(4): 369-379.
[14]赵静, 龙腾, 兰玉彬, 等. 多旋翼无人机近地遥感光谱成像装置研制[J]. 农业工程学报, 2020, 36(3): 78-85.
Zhao Jing, Long Teng, Lan Yubin, et al. Development of nearearth remote sensing spectral imaging device based on multirotor UAV [J]. Transactions of the Chinese Society of Agricultural Engineering, 2020, 36(3): 78-85.
[15]Corcoles J I, Ortega J F, Hernandez D, et al. Estimation of leaf area index in onion (Allium cepa L.) using an unmanned aerial vehicle [J]. Biosystems Engineering, 2013, 115(1): 31-42.
[16]Xie C Q, Yang C. A review on plant highthroughput phenotyping traits using UAVbased sensors [J]. Computers and Electronics in Agriculture, 2020, 178: 105731.
[17]许童羽, 郭忠辉, 于丰华, 等. 采用GAELM的寒地水稻缺氮量诊断方法[J]. 农业工程学报, 2020, 36(2): 209-218.
Xu Tongyu, Guo Zhonghui, Yu Fenghua, et al. Genetic algorithm combined with extreme learning machine to diagnose nitrogen deficiency in rice in cold region [J]. Transactions of the Chinese Society of Agricultural Engineering, 2020, 36(2): 209-218.
[18]周慧, 苏有勇, 王重洋, 等. 利用无人机的多光谱参数预测荔枝叶片养分质量分数[J]. 热带地理, 2019, 39(4): 562-570.
Zhou Hui, Su Youyong, Wang Chongyang, et al. Prediction of nutrient content in litchi leaves by UAV multispectral parameters [J]. Tropical Geography, 2019, 39(4): 562-570.
[19]束美艳, 李世林, 魏家玺, 等. 基于无人机平台的柑橘树冠信息提取[J]. 农业工程学报, 2021, 37(1): 68-76.
Shu Meiyan, Li Shilin, Wei Jiaxi, et al. Extraction of citrus crown parameters using UAV platform [J]. Transactions of the Chinese Society of Agricultural Engineering, 2021, 37(1): 68-76.
[20]Perry E M, Goodwin I, Cornwall D. Remote sensing using canopy and leaf reflectance for estimating nitrogen status in redblush pears [J]. Hortscience, 2018, 53(1): 78-83.
[21]Prado Osco L, Marques Ramos A P, Roberto Pereira D, et al. Predicting canopy nitrogen content in citrustrees using random forest algorithm associated to spectral vegetation indices from UAVimagery [J]. Remote Sensing, 2019, 11(24): 2925.
[22]Moghimi A, Pourreza A, ZunigaRamirez G, et al. A novel machine learning approach to estimate grapevine leaf nitrogen concentration using aerial multispectral imagery [J]. Remote Sensing, 2020, 12(21): 3515.
[23]Noguera M, Aquino A, Ponce J M, et al. Nutritional status assessment of olive crops by means of the analysis and modelling of multispectral images taken with UAVs [J]. Biosystems Engineering, 2021, 211: 1-18.
[24]房賢一. 不同物候期的苹果树冠层氮素含量高光谱估测研究[D]. 泰安: 山东农业大学, 2015.
Fang Xianyi. Hyperspectral estimation of apple tree canopy nitrogen contents at different phenological phases [D]. Taian: Shandong Agricultural University, 2015.
[25]陈澜. 基于高光谱遥感的苹果生化参数估算模型研究[D]. 杨凌: 西北农林科技大学, 2020.
Chen Lan. Study on the estimation model of Apple biochemical parameters based on hyperspectral remote sensing [D]. Yangling: Northwest A & F University, 2020.
[26]杨福芹, 冯海宽, 李振海, 等. 苹果叶片氮含量高光谱反演方法对比[J]. 遥感技术与应用, 2021, 36(2): 353-361.
Yang Fuqin, Feng Haikuan, Li Zhenhai, et al. Comparison of hyperspectral remote sensing inversion methods for apple leaf nitrogen content [J]. Remote Sensing Technology and Application, 2021, 36(2): 353-361.
[27]王鑫梅, 张劲松, 孟平, 等. 基于无人机遥感影像的核桃冠层氮素含量估算[J]. 农业机械学报, 2021, 52(2): 178-187.
Wang Xinmei, Zhang Jinsong, Meng Ping, et al. Estimation of nitrogen content in walnut canopy based on UAV remote sensing image [J]. Transactions of the Chinese Society for Agricultural Machinery, 2021, 52(2): 178-187.
[28]田中宇. 苹果树冠层氮素含量遥感诊断与施肥模型研究[D]. 泰安: 山东农业大学, 2021.
Tian Zhongyu. Remote sensing diagnosis of nitrogen content in apple canopies and fertilization model of apple trees [D]. Taian: Shandong Agricultural University, 2021.
[29]权泽堃, 王金星, 刘双喜, 等. 基于图像处理的苹果树叶片氮含量检测[J]. 现代农业装备, 2021, 42(3): 40-48.
Quan Zekun, Wang Jinxing, Liu Shuangxi, et al. Detection of nitrogen content in apple tree leaves based on image processing [J]. Modern Agricultural Equipment, 2021, 42(3): 40-48.
[30]冯璐, 邢芳芳, 杨北方, 等. 基于红外热成像的棉花叶片温度分布量化方法研究[J]. 棉花学报, 2020, 32(6): 569-576.
Feng Lu, Xing Fangfang, Yang Beifang, et al. The quantitative method for temperature distribution of cotton leaves based on infrared thermal images [J]. Cotton Science, 2020, 32(6): 569-576.
[31]苗艳龙, 彭程, 高阳, 等. 基于地基激光雷达的玉米株高与茎粗自动测量研究[J]. 农业机械学报, 2021, 52(S1): 43-50.
Miao Yanlong, Peng Cheng, Gao Yang, et al. Automatic measurement of plant height and stem thickness of maize based on terrestrial laser scanning [J]. Transactions of the Chinese Society for Agricultural Machinery, 2021, 52(S1): 43-50.
[32]甘平, 董燕生, 孙林, 等. 基于无人机载LiDAR数据的玉米涝灾灾情评估[J]. 中国农业科学, 2017, 50(15): 2983-2992.
Gan Ping, Dong Yansheng, Sun Li, et al. Evaluation of maize waterlogging disaster using UAV LiDAR data [J]. Scientia Agricultura Sinica, 2017, 50(15): 2983-2992.
[33]Shendryk Y, Sofonia J, Garrard R, et al. Finescale prediction of biomass and leaf nitrogen content in sugarcane using UAV LiDAR and multispectral imaging [J]. International Journal of Applied Earth Observation and Geoinformation, 2020, 92: 14.
[34]井宇航, 郭燕, 張会芳, 等. 无人机飞行高度对冬小麦植株氮积累量预测模型的影响[J]. 河南农业科学, 2022, 51(2): 147-158.
Jing Yuhang, Guo Yan, Zhang Huifang, et al. Effects of UAV flight height on prediction model of plant nitrogen accumulation in winter wheat [J]. Journal of Henan Agricultural Sciences, 2022, 51(2): 147-158.
猜你喜欢
科技创新与应用(2016年31期)2016-12-03 03:33:48
时代金融(2016年27期)2016-11-25 17:51:36
科教导刊(2016年26期)2016-11-15 20:19:33
人间(2016年26期)2016-11-03 17:52:40
中国科技博览(2016年22期)2016-11-01 18:10:31
科技视界(2016年22期)2016-10-18 14:30:27
科学与财富(2016年28期)2016-10-14 21:19:17
商(2016年22期)2016-07-08 14:32:30
商(2016年22期)2016-07-08 14:05:14
环球时报(2016-05-16)2016-05-16 07:53:46