基于双预瞄纯追踪算法的丘陵山区农机差分导航系统研究
2024-05-22 21:18:33陈柯霖谢守勇陈翀向旺刘伟
中国农机化学报 2024年2期
关键词:路径规划
陈柯霖 谢守勇 陈翀 向旺 刘伟


摘要:针对丘陵山区农业机械因体积小、种类多,难以无人作业改造的问题,搭建基于双预瞄纯追踪算法的丘陵山区农机差分导航系统,完成导航系统结构、路径规划策略和追踪控制器的设计。使用Ntrip DTU和北斗定位板卡完成差分定位。采用平滑转向方式,提出适用于丘陵山区的全局路径规划策略,可有效适配不同转弯半径的农机,减少地头区域。设计双预瞄纯追踪模糊控制器,开展与纯追踪控制器的对比仿真试验,并搭建试验样机完成测试。实际测试结果显示:控制器在追踪直线时,在s=2.9 m处收敛,在之后的直线追踪中平均绝对误差保持在0.01 m;在追踪曲线时,两段弯道最大误差分别为0.08 m和0.75 m,平均绝对误差0.04 m。
关键词:丘陵山区;差分导航;路径规划;纯追踪;双预瞄模糊控制器
中图分类号:S24
文献标识码:A
文章编号:20955553 (2024) 02018707
收稿日期:2023年2月13日 修回日期:2023年5月18日
基金项目:中国烟草总公司重庆市烟草专卖局(公司)科技计划项目(B20211NY1317);重庆市技术创新与应用发展专项重点项目(cstc2021jscx—gksbX0065)
第一作者:陈柯霖,男,1996年生,四川成都人,硕士;研究方向为农业智能装备。Email: 1083106951@qq.com
通讯作者:谢守勇,男,1969年生,重庆人,博士,教授;研究方向为智能农业装备开发。Email: zswu0310@163.com
Research on differential navigation system of agricultural machinery in hilly areas
based on dual preview pure tracking algorithm
Chen Kelin, Xie Shouyong, Chen Chong, Xiang Wang, Liu Wei
(College of Engineering and Technology, Southwest University, Chongqing, 400715, China)
Abstract:
In order to solve the problem that agricultural machinery in hilly areas is difficult to be transformed by unmanned operation due to its small size and many kinds, a differential navigation system for agricultural machinery in hilly and mountainous areas based on double preview tracking algorithm was built, and the navigation system structure, path planning strategy and tracking controller were designed. Ntrip DTU and Beidou positioning board card were used to complete differential positioning. A global path planning strategy suitable for hilly and mountainous areas was proposed by using smooth steering mode, which could effectively adapt to agricultural machinery with different turning radius and reduce field area. The dual preview pure tracking fuzzy controller was designed, and the simulation experiment was carried out compared with the pure tracking controller, and the experimental prototype was built to complete the test. The actual test results showed that the controller proposed in this paper converged at s=2.9 m when tracking the straight line, and the average absolute error remained at 0.01 m in the following straight line tracking. When tracking the curve, the maximum error of the two curves was 0.08 m and 0.75 m respectively, and the average absolute error was 0.04 m.
Keywords:
hilly areas; differential navigation; path planning; pure tracking; double preview fuzzy controller
0 引言
传感器、物联网和云计算等技术的应用,推动了现代农业向着智能化、信息化、精细化发展[1],其中卫星导航技术的应用尤其广泛[2]。根据《2021年全国农业机械化发展统計公报》,2021年中国加装北斗卫星导航系统的农用车辆超过60万台,植保无人机保有量97931架,同比增长39.22%[3],大幅提高了作业效率和农业智能化水平。
农业车辆卫星导航系统包含完整可靠的硬件基础、精准的路径追踪控制器[45]和高效的路径规划策略[6],目前国内外学者对此都有大量的研究。在追踪控制器的研究上,柴善鹏等[7]在温室农机上使用粒子群优化算法优化纯追踪追踪控制器,以提高控制精度。黎永键等[8]在东方红拖拉机上搭建双闭环转向控制的自动导航系统。王立辉等[9]依托雷沃谷神收获机搭建自适应路径追踪系统。刁勤晴等[10]通过双预瞄策略解决了跟踪大曲率路径时车速过高的问题。Ahn等[11]通过改变前瞻点与路径的几何位置,改进了纯追踪算法,解决了震荡和转弯半径过小问题。靳欣宇等[12]提出了一种基于最优预瞄时间的Stanley追踪控制器,实现了复杂道路的无人驾驶。
同时,在对导航系统核心技术之一——路径规划的研究上[13],翟卫欣等[14]提出了一种基于区块套行作业模式的路径规划方法。孟志军等[15] 根据车辆和田地的先验信息,选择不同的优化目标计算出最优路径。刘刚等[16]提出了一种基于地块平整度的全局路径规划方法,提高平地效率30%以上。Rahman等[17]使用N多边形算法和凸包分裂交叉点法完成凸凹多边形田地路径规划,减少了作物损失和工作时间。Han等[18]提出了基于X形转向的多边形地块路径规划算法,提高了作业质量。
上述导航系统使用的控制器和路径规划策略效果显著,但主要适用于特定类型的农机和场景,硬件结构相对零散并需要车载计算机的辅助,成本较高、缺乏灵活性。而丘陵山区农机种类多、农机体积小,要求导航系统扩展性高、成本低,便于二次开发。为此本文基于纯追踪算法和RTK(Realtime kinematic)定位技术搭建丘陵山区小型农机导航控制系统,完成系统硬件搭建,提出适用于丘陵山区的路径规划策略和双预瞄纯追踪模糊控制器,并对控制器进行仿真和试验,验证其准确性和有效性。
1 系统设计
1.1 自動导航系统结构组成
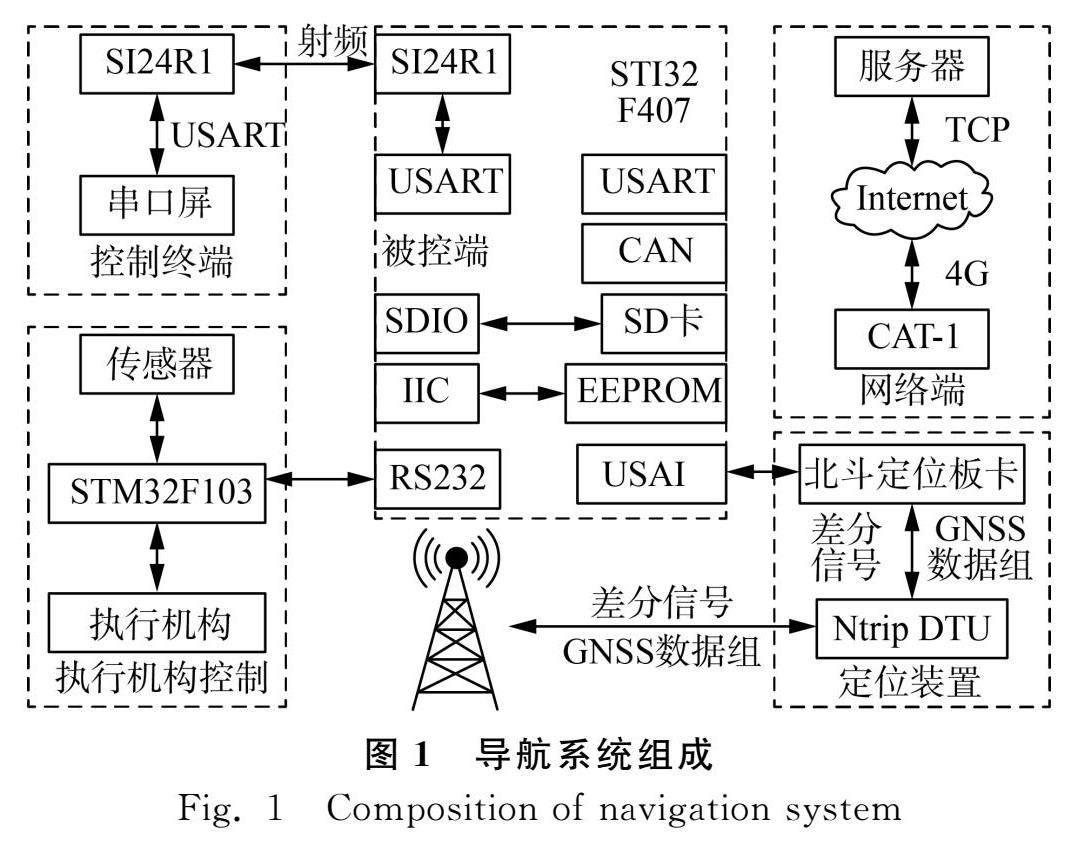
导航系统结构由控制终端、被控端、执行机构控制端、定位装置、网络端组成,如图1所示。
系统被控端芯片采用STM32F407VET6,移植freeRTOS(Free Real Time Operating System),支持任务创建,享有独立的堆栈空间,通过时间片流转和全抢占式调度,从宏观上实现多线程、多优先级处理[19]。系统数据储存由SD卡和可擦可编程只读存储器(EEPROM)组成,SD卡用以储存导航路点,移植FATFS文件系统[20],可完成路径点文件(夹)的创建、写入、删除、搜索,EEPROM储存用户设备参数。串口屏作为人机交互界面,通SI24R1射频模组与被控端连接,完成远程通信。使用4G模组接入网络,提高系统可扩展性,配置TCP(Transmission Control Protocol)通道工作模式,进行数据透传,由socket网络编程搭建服务器,可在服务器端完成数据上传、储存、处理、下载、可视化等功能,并为复杂算法提供空间和算力。定位装置使用北斗高精度定位定向板卡UB482,定位精度1cm,航向角精度0.2°/1m基线。由千寻DTU(Data Transfer unit)接收服务商固定站的差分数据,无需现场搭建固定站。数据以NMEA消息协议传输至系统解码,获取当前坐标、速度、航向角。执行单元由STM32F103VET6作为主控,由RS232接口与系统通信并预留CAN通讯接口。根据系统功能需要设计PCB主板,并将大小控制在13cm×15cm,符合轻量化设计,更加适用于小型农机。
1.2 任务创建与数据处理
系统依托freeRTOS,创建四种任务类型。数据传输类任务用于整合外部通信接口,与系统内部建立通道;数据处理类任务用于预处理定位数据及解析命令、根据命令调用路径规划和路径追踪功能;数据存储类任务用于完成数据的存储和调用;人机交互类任务为用户提供触摸屏输入界面以及操作按键。采用串口DMA(Direct Memory Access)中断接收定位数据,接收与解码轮转,避免数据丢失问题。在中断中引入二进制信号量,完成数据接收与解码任务的同步,建立消息队列等待其他任务对定位数据请求。以“$cmd+命令符+文件名+#”规则建立命令,在数据处理任务中解析字符串,设置事件组中对应位实现多任务之间的同步。
2 路径规划策略
丘陵山区田块面积相对较小,边缘规整度低,为提高土地使用效率,提出一种转弯地头小、对车辆适应性高、生成路径规整度好的规划策略。将田块分为自主作业区和遥控作业区,在自主作业区使用跨行次数nc来量化通勤路线长度,以减小地头转弯区域为主,减少通勤路线长度为辅规划路径。在遥控作业区,对人工遥控作业产生的路点全程采集并存储,可供自主作业二次调用。
2.1 作业区和作业带划分
在获取经纬度信息后,因其单位跨度较大,将其转化为通用墨卡尔投影(UTM)下的位置信息。通过四点圈定田块,规整为四边形,分别计算四边与对边端点的最大距离,选择其中最小距离d3对应的边l3作为起始边,以作业宽幅w等距切分起始边最短邻边l1,生成n条作业带,使得作业条数和转弯次数最少,作业带中心线即为自主作业路径雏形,同时划出了自主和遥控作业区,如图2所示。
2.2 自主作业区转向方式及路径规划
根据车辆转弯半径r和作业条数n,分割地头区域。本文自主作业区采用平滑转向[11],在转弯半径较大时,使用跨行平滑转向代替常用的Ω形转向掉头,见图3。
(a) Ω形转向
(b) 平滑转向
由几何关系可得,平滑转向对转弯地头区域要求长度与α和r有关,当边界为斜边时,根据相切的两直线生成转向圆弧,转弯区域长度
h1=r·sin(90°-α)+w2
(1)
而常用的Ω形转向,转弯区域长度
h2=2rsinarccosw+2r4r+r+w2
(2)
由式(1)和式(2)知,平滑转向相较于常用的Ω形转向,占用地头转弯区域更少。
当r≤1/2w时,无需跨行转向,地头转弯区域较小,以梭行法[11]生成作业路径,能够减少通勤路线长度,此时跨行次数nc=n,如图4(a)所示。
当r>1/2w时,需转向跨行,使用结行法规划路径,如图4(b)所示。结行法最小作业条数ns与转弯半径r、作业宽幅w相关,按式(3)计算,在相同转弯半径和作业宽幅下,该方法较于常用的套行法[11],每条作业带所消耗的通勤路径更短,且要求的最小作业条数更小,扩大了适用范围,如图4(c)所示,在转弯最小跨行数都为2且车辆同侧进出的状态下,满足结行法的最小作业行数为4,而套行法为6。对于结行法,其跨行次数nc按式(4)计算。
ns=2×2rw r≥12w
(3)
nc=4∑n2i=1i-3
(4)
由式知当作业条数为4时,nc最小,作业条数增多时,nc增速上升,为减小通勤路线长度,将其分组,如图4(d)所示。以最小作业条数为一组,将n条作业路径分为gs个最小组和1个作业条数为nf剩余组。其中gs和nf分别按式(5)、式(6)计算。
gs=nns-1
(5)
nf=n-gs·ns
(6)
(a) 梭行法,r (b) 结行法,n=4 (c) 结行与套行对比 (d) 组合法 3 双预瞄纯追踪模糊控制器设计 3.1 农机运动模型分析 对路径进行精确追踪是导航系统的主要功能,而实现这一功能需要对农业机械转向模型进行分析,丘陵山区常用的农机运动转向模型为阿克曼转向和履带差速转向两类。在质心和几何中心重合且不计车轮滑移的条件下对两类模型分析,如图5所示。 (a) 阿克曼轉向模型 (b) 履带差速转向模型 对农机转向模型进行运动学分析,将阿克曼转向模型简化成自行车模型,如图5(a)所示,可得转弯半径与前轮航向角关系如式(7)所示。 tanβ2=dr (7) 对于履带式农机,将其等效为二轮差速模型,如图5(b)所示,其中虚拟轮距dv与实际工况变化的参数相关[21],根据运动学分析可得式(8)。 r=v2dr=(v1+v3)×dv2(v3-v1) (8) 由以上分析得,阿克曼转向和履带差速转向可分别通过改变前轮转向角和左右履带速度来获取期望的转弯半径。为此系统采用通过改变转弯半径来追踪目标的纯追踪算法,该算法对追踪路径的连续性要求低,系统路径可采用点间隔0.2m的路点形式存储,加入双预瞄模糊控制器提高追踪精度。面对不同种类的农机,只需要修改执行机构端程序完成转弯半径的控制以适配系统。 3.2 双预瞄纯追踪几何模型分析 纯追踪算法是通过车辆的横向偏差和到预瞄点的航向偏差计算出期望转弯半径,对纯追踪模型进行分析如图6所示。 通过分析可得式(9)。 ldsinα=rsinπ-2α2 (9) 简化可得半径与前视距离的关系如式(10)所示。 r=ld2sinα (10) 由式(10)可知,纯追踪法所得的期望转弯半径r与ld、α有关。其中α根据实际位置计算得知,ld为系统设定值,并且追踪性能极大地取决于ld的大小。当ld较小时,跟踪更加精准,但过小的前视距离也会带来震荡,而较大的前视距离意味着跟踪轨迹越平滑,但在弯曲道路上,跟踪精度会下降。 3.3 双预瞄纯追踪模糊控制器设计 确定一个合适的前视距离,提高追踪精度,更加有利于农机在丘陵山区作业。本文使用双预瞄和模糊算法建立纯追踪控制器。第一预瞄点对道路曲折度进行评估,算法从最近路点开始向前搜索路点直到最大前视距离位置,计算搜索到的相邻路点连线的平均夹角大小,用于评估道路曲折度,第二预瞄点即为由前视距离确定的跟踪目标点,见图6。模糊控制器输入为横向偏差和曲折度,输出为前视距离,对输入输出模糊化。 横向偏差论域为-2~2 m,量化等级负大(NB),负中(NM),负小(NS),零(ZO),正小(PS),正中(PM),正大(PB)。 道路曲折度论域 0°~8°,量化等级超小(VS),小(S),中(M),大(B),超大(VB)。 前视距离论域0.5~2.5 m,量化等级超小(VS),小(S),中(M),大(B),超大(VB)。 根据车辆驾驶经验,当横向偏差较大、道路曲折时,减小前视距离,预瞄近点,以快速逼近路线,更精准的跟踪路径。当横向偏差小、道路端直时,增大前视距离,使行驶路径更加平滑。基于上述驾驶经验,经过专家经验设计的三维模糊控制器共有35条控制规则,如表1所示,模糊控制曲面如图7所示。 4 路点追踪仿真 为测试双预瞄纯追踪模糊控制器的可靠性,建立阿克曼转向模型,设定车辆轴距1m。取固定前视距离1.6m和控制器输出的动态前视距离,使用Python编写控制器程序,根据上述路径规划策略特点生成追踪路点,完成直线和曲线追踪仿真实验。 4.1 直线追踪仿真 以起点(0,1)、终点(0,13),点间隔0.2m生成直线路点,车辆起始位置(0,0),航向角0°,追踪路点,仿真结果如图8、图9所示。 直线路径曲折度为0,从起点开始横向误差较大,此时控制器输出较短的前视距离,使车辆快速逼近路径,在s=2.65m时处接近路点,使追踪误差减少到0.1m以内,固定前视距离则在s=4.2m时误差接近0.1m。动态距离输出最大反向误差约为0.04m,固定距离最大反向误差约为0.03m,差值0.01m,但使用动态距离可快速地将误差逼近到小范围内,以满足作业要求。随着横向误差减小,控制器输出较长的前视距离,车辆平缓靠近路点,并在s=7m时将追踪误差减小到0.01m以内。 4.2 曲线追踪仿真 以起点(0,-2),终点(6,-2),半径2.5m生成两段曲线路点。车辆起点(0,0),航向角90°,追踪路点,仿真结果如图10、图11所示。 在初始阶段,车辆在路径上且航向与路径一致,固定距离和动态距离跟踪精度差距小。当要进入曲线路点时,第一预瞄点向前搜索,计算出道路曲折度变大,控制器提前输出一个较小的前视距离以更精确地追踪路点。而固定距离在道路变曲折时,未作出相应改变,导致转弯半径变小,从而偏离路点。 车辆在s=2m处进入曲线路径,误差持续变大,在第一段曲线路径和第二段曲线路径中,使用固定距离的追踪误差分别在s=3.7m和s=9.3m时达到最大值0.22m和0.13m,动态距离则在s=3.8m和s=8.3m时达到最大值,分别为0.05m和0.06m。 通过仿真数据知,相比于固定前视距离,使用动态前视距离追踪直线路點能够更快收敛,在追踪曲线路点时,精度更高。 5 路点追踪试验 为验证系统和追踪算法的可行性,改装实验室现有小型播种机作为试验样机,采样实际UTM坐标(390 431.23,3 395 672.39)并生成作业直线与两段曲线路径点。在速度1m/s,误差1m,航向角0°的初始状态下分别使用固定和动态前视距离完成追踪试验,试验结果如图12、图13所示。 结果表明,使用固定前视距离追踪时,车辆在s=4.2m处逼近直线路径,并产生0.01m的反向误差,在追踪曲线路点阶段,追踪第一段和第二段曲线路点最大误差分别为0.16m和0.11m,平均绝对误差为0.09m,并在回到之后直线路点时,产生0.08m的反向误差。 而使用动态前视距离追踪时,车辆在s=2.9m处逼近直线路径,产生0.02m的反向误差,在追踪曲线路点时,第一段和第二段曲线路点最大误差为0.08m和0.075m,平均绝对误差为0.04m。并在回到之后直线路径时,产生0.02m的反向误差。两者在追踪直线误差稳定后平均绝对误差均为0.01m。 6 结论 1) 针对丘陵山区小型农机无人作业改造难及改造成本高的问题,完成了轻量化导航系统的控制主板和远程控制终端的设计,并将主板控制在13cm×15cm大小。 2) 根据丘陵山地田块特点,提出了平滑转向配合梭行法及结行法的路径规划策略,通过公式分析得出,该方法地头面积更小,可适用于不同转弯半径的农机。 3) 设计出了双预瞄纯追踪模糊控制器并进行仿真和试验,结果表明使用双预瞄纯追踪模糊控制器追踪直线路段时,在s=2.9m收敛到目标点,相比于纯追踪控制器,提前了1.55m,且趋于稳定后,追踪的平均绝对误差仅有0.01m。在进入曲线路段时,追踪第一段和第二段的误差分别为0.08m和0.075m,相比于纯追踪控制器,分别减少了0.08m和0.035m,有效地提高了系统的收敛速度,实现了农机对路径的精确追踪。 参 考 文 献 [1]姬长英, 周俊. 农业机械导航技术发展分析[J]. 农业机械学报, 2014, 45(9): 44-54. Ji Changying, Zhou Jun. Current situation of navigation technologies for agricultural machinery [J].Transactions of the Chinese Society for Agricultural Machinery, 2014, 45(9): 44-54. [2]钟银, 薛梦琦, 袁洪良. 智能农机GNSS/INS组合导航系统设计[J]. 农业工程学报, 2021, 37(9): 40-46. Zhong Yin, Xue Mengqi, Yuan Hongliang. Design of the GNSS/INS integrated navigation system for intelligent agricultural machinery [J]. Transactions of the Chinese Society of Agricultural Engineering, 2021, 37(9): 40-46. [3]农业农村部农业机械化管理司. 2021年全国农业机械化统计年报[M]. 2022. [4]黎永键, 赵祚喜, 黄培奎, 等. 基于CAN总线的拖拉机导航控制系统设计与试验[J]. 农业机械学报, 2016, 47(S1): 35-42. Li Yongjian, Zhao Zuoxi, Huang Peikui, et al. Design and experiment of navigation control system for tractor based on CAN bus [J]. Transactions of the Chinese Society for Agricultural Machinery, 2016, 47(S1): 35-42. [5]李革, 王宇, 郭刘粉, 等. 插秧机导航路径跟踪改进纯追踪算法[J]. 农业机械学报, 2018, 49(5): 21-26. Li Ge, Wang Yu, Guo Liufen, et al. Improved pure pursuit algorithm for rice transplanter path tracking [J]. Transactions of the Chinese Society for Agricultural Machinery, 2018, 49(5): 21-26. [6]刘洋成, 耿端阳, 兰玉彬, 等. 基于自动导航的农业装备全覆盖路径规划研究进展[J]. 中国农机化学报, 2020, 41(11): 185-192. Liu Yangcheng, Geng Duanyang, Lan Yubin, et al. Research progress of agricultural equipment full coverage path planning based on automatic navigation [J]. Journal of chinese Agricultural Mechanization, 2020, 41(11): 185-192. [7]柴善鹏, 姚立健, 徐丽君, 等. 基于动态前视距离纯追踪模型的温室农机路径跟踪研究[J]. 中国农机化学报, 2021, 42(11): 58-64, 79. Chai Shanpeng, Yao Lijian, Xu Lijun, et al. Research on greenhouse agricultural machinery path tracking based on dynamic look ahead distance pure pursuit model [J]. Journal of Chinese Agricultural Mechanization, 2021, 42(11): 58-64, 79. [8]黎永鍵, 赵祚喜, 黄培奎, 等. 基于DGPS与双闭环控制的拖拉机自动导航系统[J]. 农业机械学报, 2017, 48(2): 11-19. Li Yongjian, Zhao Zuoxi, Huang Peikui, et al. Automatic navigation system of tractor based on DGPS and double closedloop steering control [J]. Transactions of the Chinese Society for Agricultural Machinery, 2017, 48(2): 11-19. [9]王立辉, 石佳晨, 王乐刚, 等. 智能收获机定位和自适应路径追踪方法[J]. 导航定位学报, 2020, 8(6): 29-36. Wang Lihui, Shi Jiachen, Wang Legang, et al. A location and adaptive path tracking methods for intelligent harvesters [J]. Journal of Navigation and Positioning, 2020, 8(6): 29-36. [10]刁勤晴, 张雅妮, 朱凌云. 双预瞄点智能车大曲率路径的横纵向模糊控制[J]. 中国机械工程, 2019, 30(12): 1445-1452. Diao Qinqing, Zhang Yani, Zhu Lingyun. A lateral and longitudinal fuzzy control of intelligent vehicles with double preview points for large curvature roads [J]. China Mechanical Engineering, 2019, 30(12): 1445-1452. [11]Ahn J, Shin S, Kim M, et al. Accurate path tracking by adjusting lookahead point in pure pursuit method [J]. International journal of automotive technology, 2021, 22: 119-129. [12]靳欣宇, 张军, 刘元盛, 等. 基于Stanley算法的自适应最优预瞄模型研究[J]. 计算机工程, 2018, 44(7): 42-46. Jin Xinyu, Zhang Jun, Liu Yuansheng, et al. Research on adaptive optimal preview model based on Stanley algorithm [J].Computer Engineering, 2018, 44(7): 42-46. [13]周俊, 何永强. 农业机械导航路径规划研究进展[J]. 农业机械学报, 2021, 52(9): 1-14. Zhou Jun, He Yongqiang. Research progress on navigation path planning of agricultural machinery [J]. Transactions of the Chinese Society for Agricultural Machinery, 2021, 52(9): 1-14. [14]翟卫欣, 王东旭, 陈智博, 等. 无人驾驶农机自主作业路径规划方法[J]. 农业工程学报, 2021, 37(16): 1-7. Zhai Weixin, Wang Dongxu, Chen Zhibo, et al. Autonomous operation path planning method for unmanned agricultural machinery [J]. Transactions of the Chinese Society of Agricultural Engineering, 2021, 37(16): 1-7. [15]孟志军, 刘卉, 王华, 等. 农田作业机械路径优化方法[J]. 农业机械学报, 2012, 43(6): 147-152. Meng Zhijun, Liu Hui, Wang Hua, et al. Optimal path planning for agricultural machinery [J]. Transactions of the Chinese Society for Agricultural Machinery, 2012, 43(6): 147-152. [16]刘刚, 康熙, 夏友祥, 等. 基于GNSS农田平整全局路径规划方法与试验[J]. 农业机械学报, 2018, 49(5): 27-33. Liu Gang, Kang Xi, Xia Youxiang, et al. Global path planning algorithm and experiment based on GNSScontrolled precise land leveling system [J]. Transactions of the Chinese Society for Agricultural Machinery, 2018, 49(5): 27-33. [17]Rahman M M, Ishii K, Noguchi N. Optimum harvesting area of convex and concave polygon field for path planning of robot combine harvester [J]. Intelligent Service Robotics, 2019, 12: 167-179. [18]Han X, Kim H J, Jeon C W, et al. Design and field testing of a polygonal paddy infield path planner for unmanned tillage operations [J]. Computers and Electronics in Agriculture, 2021, 191: 106567. [19]熊一鵬, 岳伟. FreeRTOS多任务调度机制在监控单元中的应用[J]. 单片机与嵌入式系统应用, 2021, 21(9): 64-66. Xiong Yipeng, Yue Wei. Application of multitask scheduling mechanism in FreeRTOS system in monitoring unit [J]. Microcontrollers & Embedded Systems, 2021, 21(9): 64-66. [20]高兆强, 王绍举, 徐伟, 等. FATFS在嵌入式操作系统FreeRTOS中的移植与应用[J]. 现代电子技术, 2017, 40(6): 65-67, 70. Gao Zhaoqiang, Wang Shaoju, Xu Wei, et al. Transplantation and application of FATFS in embedded operating system FreeRTOS [J]. Modern Electronics Technique, 2017, 40(6): 65-67, 70. [21]Wang T, Wu Y, Liang J, et al. Analysis and experimental kinematics of a skidsteering wheeled robot based on a laser scanner sensor [J]. Sensors, 2015, 15(5): 9681-9702.
猜你喜欢
物联网技术(2016年12期)2017-01-21 21:28:10
中国新通信(2016年22期)2017-01-13 09:15:21
电脑知识与技术(2016年28期)2016-12-21 13:11:43
电子技术与软件工程(2016年20期)2016-12-21 10:52:33
科技视界(2016年26期)2016-12-17 15:53:57
电脑知识与技术(2016年26期)2016-11-25 00:00:00
科技视界(2016年20期)2016-09-29 12:00:43
电脑知识与技术(2016年17期)2016-07-23 20:25:51
电脑知识与技术(2016年13期)2016-06-29 20:13:01
中国科技博览(2016年3期)2016-04-25 17:11:10