基于激光雷达自适应聚类半径的树冠检测研究
2024-05-22 21:42:47台少瑜李云伍赵颖林先卬黎远江王义成
中国农机化学报 2024年2期
关键词:激光雷达
台少瑜 李云伍 赵颖 林先卬 黎远江 王义成


摘要:为解决丘陵山地果园条件下激光雷达检测过程中面对多尺寸、多距离条件下出现的目标物体漏检、误检等欠分割和过分割问题,提出一种基于激光雷达的自适应目标聚类半径目标物体检测方法。首先,在使用激光雷达感知到周围环境的三维点云后,去除地面点云并且使用体素滤波进行降采样的预处理,在减少数据量的同时去除点云中的噪声点。其次,建立Kd tree模型进行最近邻搜索,以加速欧式聚类的进程,通过自适应确定每颗树冠的聚类半径,使欧式聚类能够得到更好的聚类效果。最后为验证算法准确性和实用性,基于果园履带车平台,采用32线激光雷达对所提算法进行实车测试。结果表明:在丘陵山地果园中该算法可准确聚类果树树冠点云,且实地目标正检率为94.41%。
关键词:激光雷达;树冠检测;Kd tree模型;自适应聚类
中图分类号:TN959.6
文献标识码:A
文章编号:20955553 (2024) 02022107
收稿日期:2022年11月30日 修回日期:2022年12月23日
基金项目:贵州省科技计划项目(黔科合支撑[2021]一般171)
第一作者:台少瑜,男,1999年生,山东诸城人,硕士研究生;研究方向为田间作业环境感知技术。Email: taishaoyu@163.com
通讯作者:李云伍,男,1974年生,重庆人,博士,教授;研究方向为智能农机装备及田间作业环境感知技术。Email: liywu@swu.edu.cn
Research on crown detection based on adaptive clustering radius of Lidar
Tai Shaoyu1, Li Yunwu1, 2, Zhao Ying1, Lin Xianang1, Li Yuanjiang1, Wang Yicheng1
(1. College of Engineering and Technology, Southwest University, Chongqing, 400716, China;
2. Chongqing Key Laboratory of Agricultural Equipment in Hilly Area, Chongqing, 400716, China)
Abstract:
In order to solve the problem of undersegmentation and oversegmentation such as missed detection and false detection of target objects under multisize and multidistance conditions in the process of Lidar detection under hilly and mountainous orchard conditions, a target object detection method based on adaptive target clustering radius of Lidar is proposed. Firstly, by using Lidar to sense the threedimensional point cloud of the surrounding environment, the ground point cloud is removed and the preprocessing of down sample is performed by voxel filter. The amount of data is reduced and the noise points in the point cloud is removed. Secondly, the Kd tree model is established and the nearest neighbor search is carried out to accelerate the process of Euclidean clustering. By adaptively determining the clustering radius of each crown, the Euclidean clustering can get better clustering results. Finally, in order to verify the accuracy and practicability of the algorithm, based on the orchard tracked vehicle platform, a 32-line Lidar is used to test the algorithm. The results show that the algorithm can accurately cluster the canopy point cloud of fruit trees in hilly and mountainous orchards, and the field target detection rate is 94.41%.
Keywords:
Lidar; crown detection; Kdimensional tree model; adaptive clustering
0 引言
果树单木树冠信息(如冠幅、树冠面积和树冠体积等)是果树生长状态的重要体现,也是产量预测估计的重要方法,更是實现果园精准管理的重要前提[1]。树冠信息作为果树变量施药和精确对靶施药等果园精准管理操作的基础,对果树树冠进行精确检测则具有重要的学术研究与应用意义[23]。
现有针对树冠检测常用的方法包括基于机器视觉的目标感知方案、基于机器视觉和激光雷达融合的目标感知方案与基于激光雷达等目标物体感知方案[4]。其中基于机器视觉的目标感知方案鲁棒性较差,受环境光影响较大,阴雨天气环境下作业效果不理想,不能满足作业要求。而林乐彬[5]提出将激光雷达与机器视觉相融合的方法,虽然可以快速准确地识别障碍物,但是该算法应用在杂草较多的果园时视觉容易受到杂草干扰,并且该算法在夜间工作时检测效果大幅下降,算法鲁棒性较差,无法在农时高质量地完成作业。
三维激光雷达由于其优异的性能、稳定的信号输入、较好的测距能力和受环境光影响较小的优势在目标检测方面应用较广。目前常用的激光雷达聚类算法有kmeans聚类算法、DBSCAN聚类算法和欧几里得聚类算法[6]。kmeans聚类算法由于需要提前设置聚类数目,因此不适合用于树冠检测。蔡怀宇[7]针对传统DBSCAN算法漏检和误检的问题,对选取邻域半径参数的方法进行了改进,改进后的算法虽漏检率和误检率略有降低,但其正检率仍为86.27%,属于偏低水平。张文宇[8]针对DBSCAN聚类算法中选取参数时需要不断进行试验验证来改进参数的问题,提出了一种根据不同搜索范围来自适应惯性权重更新的策略,改进后的聚类效果虽有明显的提高,但该算法运行效率较低,不适合用于果园树冠实时性检测。牛国臣[9]将自适应聚类与DBSCAN聚类算法相融合,通过改进kmeans算法将障碍物分组从而完成聚类,该算法虽然运行效率较高但聚类效果受参数Minpts和Eps影响较大,算法鲁棒性不高。
欧式聚类算法因能较高质量地完成树冠聚类过程而在树冠检测中广泛使用。范晶晶[10]针对越野环境下的目标识别问题,将被检测目标的几何物理特征与聚类思想相结合,提出并设计了基于Kd Tree和欧式聚类算法的目标检测算法,但是该算法在识别相近物体时算法鲁棒性较差。孔德明[11]针对激光雷达检测目标障碍物时出现的目标物体欠分割与过分割等检测不準确的情况对欧式算法进行了优化,算法优化后能够在多目标检测实验中有较高精度的聚类效果。伍锡如[12]将三维激光雷达获取的点云数据中距离中心点偏远的点云数据进行剔除与分离,改进后的欧式聚类算法障碍物识别准确率的提升较为显著。尚业华[13]使用三维激光雷达检测障碍物,并在聚类时将无效障碍物进行识别与去除,在其后来实验中验证检出率高达96%。
基于先前研究,本文使用欧式聚类算法对丘陵山区果园树冠检测开展研究,由于上述聚类算法改进效果虽较好,但改进策略大都比较复杂,算法实现成本较高。因此,本文提出一种聚类半径自适应的改进欧式聚类算法。该算法借鉴Yan[14]提出的地面分割方式和根据距离自动调整聚类范围的方法,调整刘亮[15]提出的消除车辆点云模块,通过降采样、分割地面后得到非地面点云,对处理后的三维点云进行基于Kd Tree的最近邻搜索后根据激光雷达与目标物体之间的欧氏距离计算出该目标物体的聚类半径,完成目标物的聚类检测。
1 树冠检测算法概述
树冠检测算法主要是由3部分组成[16]。第1部分为信号输入部分。该部分接入激光雷达信号后由车载工控机转换为环境三维点云,该部分主要作用是将环境转换为机器语言[17]。第2部分为点云预处理部分。该部分通过滤波降采样、去噪和分割地面对环境三维点云进行预处理,预处理之后的点云即为改进算法的ROI区域(感兴趣区域)。第3部分为点云聚类部分。该部分主要对ROI区域进行树冠聚类:首先,基于分块的思想将点云簇分块;其次,通过改进的聚类半径确定方法对树冠进行聚类;最后,聚类结果通过ROS系统自带显示程序rviz显示。
2 三维点云数据预处理
三维激光雷达通过旋转激光发射单位与接收单位获取周围信息达到感知周围环境的目的,激光雷达每秒所获取的原始点云数据量非常庞大,原始点云数据中不仅包含所需的果树树冠点云数据,还包含其他点云数据,如地面、杂草、行人等[18]。过多的点云数据会增加计算量和系统反应时间,影响实际聚类效果,因而,在对果树树冠进行识别聚类之前需要先对激光雷达采集的原始点云数据进行预处理[19]。
2.1 点云滤波
体素滤波可以达到向下采样的同时不破坏点云的形状和本身结构,可以达到降采样的同时保存比较完整的数据特点[20]。将输入的原始点云数据用一个立方栅格完全包括,在这个立方栅格中再创建10 cm×10 cm×10 cm的立方体素栅格,计算每个体素栅格的质心,用质心来近似代替该体素栅格内的所有点,达到降采样和过滤噪声点的作用。
使用质心来代替体素栅格内的点云数据更有利于聚类算法进行聚类[21],因此,采用能够达到本研究原始数据预处理要求的体素滤波对原始点云数据进行预处理。
经测量,果园试验区域果树树冠最高点均低于3.5 m,考虑到激光雷达实际安装高度与果园平面起伏,因此试验中使用直通滤波去除以激光雷达安装位置为基准面以上3 m的过高点云部分。
2.2 地平面分割
大量的地面和杂草点云对树冠检测和分类会产生影响,因此分割地面和杂草点云对树冠检测具有非常重要的意义[22]。激光雷达输入的是一个三维点云数据集C={qi|qi=(xi,yi,zi)∈R3,i=1,…,n},其中n是雷达单次扫描的总点数。为了将地面和杂草点云去除,算法会将每一个点去除,去除地面的点云将构成一个新的集合C*∈C,得到非地面点云。
由于无人车工作地面相对平坦并且Z轴大致垂直于地面的果园,试验对象是果树树冠,因而将原始点云的下部切割指定高度对试验结果影响较小,可忽略不计。
3 改进的欧式聚类算法
经过体素过滤和地面分割预处理之后的点云即为所要检测的目标物体点云。本文在Kd Tree与最近邻搜索的基础上通过改进的欧几里得聚类算法的自适应聚类半径来对目标点云进行聚类并进行目标检测。在车辆行进过程中,三维激光雷达实时产生三维点云的数据量极其庞大,而Kd Tree模型可以对庞大的三维点云数据提前进行分块处理,而这种分块可以大大缩短计算时间,提高基于欧氏距离最近邻搜索的聚类效率。
3.1 Kd tree模型的三维应用
Kd tree是一种能够将K维空间中的点进行划分的一种数据结构。由于其形如二叉树的结构特性能够显著降低运算次数、提高运算效率,因而常被用来对多维空间中的关键技术进行搜索。
Kd tree本质上是一个基于二分法的搜索树。在进行搜索时每一个节点都将未划分的多维空间划分为两部分。在每次划分时要保证划分后的点云数据的左右子空间的点云数据量尽量相等。构建流程如下。
1) 根据式(1)计算三维数据集合中每一维的方差,并从中选取具有最大方差的维度
k=max∑(X-μx)2Nx,∑(Y-μy)2Ny,∑(Z-μz)2Nz
(1)
式中:
X、Y、Z——该维空间的变量;
N*——该维空间中总变量个数;
μ*——该维空间的总体均值。
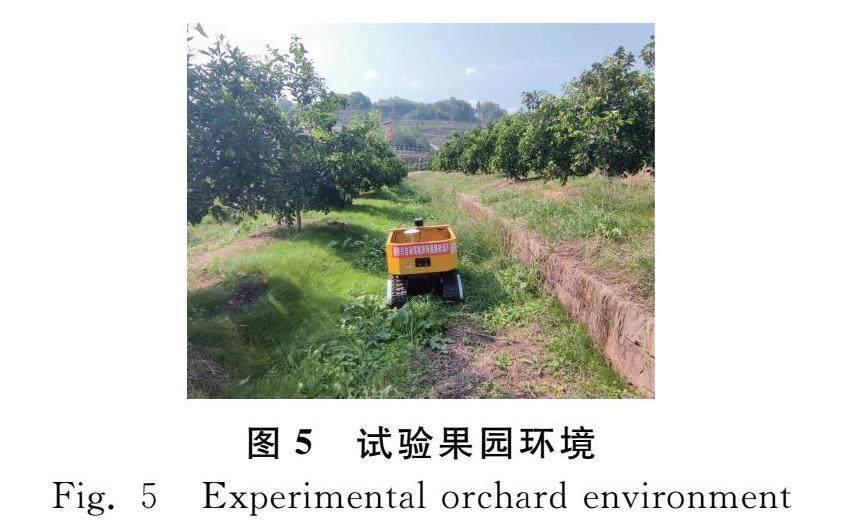
2) 根据式(2)计算三维数据中的中值m,并且将三维点云上的N个数据按递增顺序进行排列,得到集合Q={K1,K2,K3,…,KN}。其中K1 m= KN+12N为奇数 KN2+KN2+12N为偶数 (2) 3) 将步骤2中计算出的中值m赋值给阈值,根据m将集合Q分割为两个子集合Qleft和Qright,子集合符合式(3)。 x x≥m x∈Qright (3) 4) 将步骤3得到的两个子集合再次重复上次操作,以此类推,直至所有的子集合都不可以再次被划分为止。将不能被划分的子集合存储在叶子节点中。 构建完成的Kd tree的数据结构如图2所示。 3.2 自适应聚类半径的欧式聚类 欧式距离是欧几里得聚类算法的基础。空間中任意两点A:(x1,y1,z1)和B:(x2,y2,z2)的欧氏距离可以通过公式进行计算,即 d=(x1-x2)2+(y1-y2)2+(z1-z2)2 基于欧氏距离的最近邻搜索算法是加速聚类过程的核心。目标点p输入该算法后通过与当前节点划分中值m比较判断后从根节点一直到达相应叶子节点,则该叶子节点Q更新为P的最近邻点,dmin更新为节点P和Q之间的距离dPQ。随后沿搜索路径回溯其父节点,判断其父节点与Q之间的距离是否小于dmin。若是,则将该父节点更新为最近邻点并将该父节点下的其余子节点纳入该搜索范畴。若否,则沿搜索路径继续向上回溯至父节点的父节点直至根节点。空间中某点的最近邻搜索到此完成。 最近邻搜索完成后的下一步就是进行欧式聚类。在聚类过程中,聚类效果根据距离的远近所呈现的效果也不一样,这时就要考虑上述提到的聚类过程中最重要的参数就是聚类半径。为了能够使聚类结果更加准确,本文提出了一种聚类半径自适应的确定方法。(1)在采集完果树的三维点云之后对其进行标准化预处理,并建立由点云簇Ci组成的三维点云数据集C*={C1,C2,C3,…,Ci,…,Cn}。(2)根据每一簇三维点云距离激光雷达距离的远近进行升序排列,取其排列第一的三维点云簇C1的质心作为本次聚类半径确定的初始聚类中心。(3)从数据集C*中选取距离该点云簇欧氏距离最小的两束点云簇,计算这三束点云簇中每个点与初始聚类中心距离的平均值R1,并将该平均值R1作为该点云簇C1的聚类半径。(4)以此类推,其余的三维点云簇Ci也根据上述步骤得到该点云簇的聚类半径Ri。 在确定了点云簇C1的聚类半径R1后便开始进行欧式聚类,欧式聚类的流程如图3所示。 该算法在聚类时是从点云簇C1中的初始聚类中心作为第一次Kd tree最近邻搜索的核心点,完成第一次最近邻搜索后,将搜索到的K个最近邻点与初始聚类中心之间的距离与聚类半径R进行比较,形成集合M。再从点云簇Ci中选取除上次最近邻搜索的核心点以外的点重复以上过程,不断迭代直至M中无新元素增加则完成该次聚类。 完成第一簇三维数据点的聚类后,通过寻找下一簇的点云数据,进行下次三维点云数据的聚类,逐步完成上述步骤后便可以继续完成剩余点云簇的聚类。 4 试验结果与分析 4.1 试验平台与场地介绍 为了验证所提改进算法的实际环境树冠检测效果与该算法的准确性以及实用性,开展实车果园试验。试验平台采用履带式无人转运运输车作为载体,激光雷达采用速腾聚创32线激光雷达RSHelios 1615,具体参数见表1,激光雷达与运输车载体的安装如图4所示。试验环境位于重庆市渝北区郭家湾的果园内,果园环境如图5所示。试验运行环境为车载工控机采用Intel Core i5-7200U处理器,系统环境为Ubuntu18.04,算法使用C++语言进行编写,开发环境为VS code,调用PCL库中的相关点云结构,最后利用rviz显示到屏幕。 4.2 果树树冠检测结果分析 在进行果园试验时,通过控制变量设计了改进欧式聚类算法与传统欧式聚类算法的检测效果对比试验。改进算法针对该果园实际情况对算法参数进行了调整,对果园环境下采集的三维激光雷达数据进行了多距离、多尺寸、多目标物混合目标检测试验。 在多距离、多目标混合目标物检测试验中,所提改进的欧式聚类算法与传统聚类算法检测效果分别如图6所示,其中图6(a)表示激光雷达在该试验场景下采集到的原始点云数据,图6(b)表示在经过预处理操作后的ROI区域。设置传统聚类算法参数cluster_min(最少点数)为800,cluster_max(最多点数)为1 500。该试验中存在多个距离不同,但形状尺寸大小近似的目标树冠。试验表明,当履带车旁边存在多个距离不同但尺寸大小相似的目标物体时,优化欧式聚类算法能根据目标物体不同的距离,精准定位并准确确定目标物体聚类半径,能够准确地检测出障碍物。而传统欧式聚类算法在面对多距离目标物体时存在局限性,漏检了②号、③号和⑥号,并且误检了⑦号,将⑦号目标物体点云过分割,不能准确检出所有目标物体。 (a) 原始点云 (b) 过滤地面及噪声后点云 (c) 改进聚类结果 (d) 传统聚类效果 在多尺寸、多目标混合目标检测实验中,所提改进欧式聚类算法与传统欧式聚类算法检测效果对比如图7所示,其中图7(a)表示激光雷达在该试验场景下采集到的原始点云数据,图7(b)表示在经过预处理操作后的ROI区域。 (a) 原始点云 (b) 过滤地面及噪声后点云 (c) 改进聚类结果展示 (d) 传统聚类效果展示 传统聚类算法的参数设置同上实验,两种聚类方法在面对尺寸多样化的目标物体时,改进的欧式聚类算法的聚类半径根据每棵树树冠的点云数据进行计算,完成聚类半径的自适应确定过程,能够精确且快速地完成树冠的识别聚类过程,满足试验初始要求。而传统欧式聚类在面对该种情况时漏检了目标尺寸较小的②号、③号目标树冠,聚类效果有限,无法根据树冠点云数据进行聚类半径自适应的聚类,其余树冠均正常检出。 在上述试验完成后,针对该算法的准确性开展定量试验。在试验过程中,用正检率(True Positive Rate)、误检率(False Positive Rate)和漏检率(Missing Detection Rate)来评估该算法及对比算法的目标物检测结果[23]。其计算如式(4)~式(6)所示。 PT=NTNsum (4) PF=NFNsum (5) PM=NMNsum (6) 式中: PT、PF、PM—— 正检率、误检率、漏检率; NT、NF、NM—— 正检、误检、漏检树冠颗数; Nsum——参与检测的树冠总颗数。 将试验过程中录制的激光雷达三维点云数据包转换为由每帧组成的帧数据包,然后从该数据包中选取同一果园中3个不同地段的点云帧,3个地段的果树数量分别为90棵、150棵和100棵,使用传统欧式聚类算法和本文改进欧式聚类算法分别对3个地段点云帧中的果树树冠进行目标物检测,试验结果见表2。 分析试验结果可得知在相同实验条件下,改进后的欧式聚类算法目标物检测平均正检率为94.41%,相较于传统欧式聚类算法正检率提高12.36%。但是在试验过程中偶尔会出现连续几棵果树误检或漏检的情况,经过多次试验分析发现,影响原因主要有:一是果园两边的地面高度不一致,有少数果树下部土壤隆起较高,按照本文去除地面方法,该果树下部存在部分土壤和杂草点云数据无法准确去除,导致由该棵果树树冠点云信息确定的聚类半径偏小,过分割情况变多;二是果园存在两棵树树冠相互距离过近的情形,使得改进算法在进行该类果树树冠聚类检测时出现欠分割和过分割的现象。此外,该算法计算量与传统算法相比较大,处理时间较长,受计算机硬件影响,在果园试验时履带车辆前进速度较慢。 5 结论 针对传统欧式聚类在丘陵山地果园条件下激光雷达检测过程中面对多尺寸、多距离条件下出现的目标物体漏检、误检等欠分割和过分割的问题,提出基于激光雷达的自适应目标聚类半径目标物体检测方法。通过点云预处理和聚类半径自适应的实现对传统欧式聚类算法进行了优化,并进行果园实际验证。 1) 自适应聚类半径的欧式聚类能根据每一个目标物体的三维点云特征信息确定该目标物体的聚类半径。 2) 经基于分块思想预处理之后的点云簇,结合目标物聚类半径自适应能在多距离多尺寸多目标物的试验情况下精确地将目标物体识别分割。 3) 试验表明,本文改进的欧式聚类算法与传统欧式聚类算法相比正检率提高了12.36%,误检率和漏检率分别降低7.94%和4.41%。 参 考 文 献 [1]陈日强, 李长春, 杨贵军, 等. 无人机机载激光雷达提取果树单木树冠信息[J]. 农业工程学报, 2020, 36(22): 50-59. Chen Riqiang, Li Changchun, Yang Guijun, et al. Extraction of crown information from individual fruit tree by UAV LiDAR [J]. Transactions of the Chinese Society of Agricultural Engineering, 2020, 36(22): 50-59. [2]邵靖滔, 杜常清, 鄒斌. 基于点云簇组合特征的激光雷达地面分割方法[J]. 激光与光电子学进展, 2021, 58(4): 422-430. Shao Jingtao, Du Changqing, Zou Bin. Lidar ground segmentation method based on point cloud cluster combination feature [J]. Laser & Optoelectronics Progress, 2021, 58(4): 422-430. [3]王潇, 张美娜, Zhou Jianfeng, 等. LiDAR传感器及技术在农业场景的应用进展综述[J]. 中国农机化学报, 2022, 43(11): 155-164. Wang Xiao, Zhang Meina, Zhou Jianfeng, et al. A review on the application of LiDAR sensors and technologies in agricultural scenarios [J]. Journal of Chinese Agricultural Mechanization, 2022, 43(11): 155-164. [4]刘畅, 赵津, 刘子豪, 等. 基于欧氏聚类的改进激光雷达障碍物检测方法[J]. 激光与光电子学进展, 2020, 57(20): 254-260. Liu Chang, Zhao Jin, Liu Zihao, et al. Improved lidar obstacle detection method based on euclidean clustering [J]. Laser & Optoelectronics Progress, 2020, 57(20): 254-260. [5]林乐彬, 周军, 皇攀凌, 等. 基于图像检测的三维激光点云聚类方法研究与应用[J]. 控制工程, 1-8[2024-02-01]. Lin Lebin, Zhou Jun, Huang Panling, et al. Research and application on 3D laser point cloud clustering method based on image detection [J]. Control Engineering of China, 1-8[2024-02-01]. [6]冯吉, 胡佳宁, 于家旋, 等. 基于激光雷达信息的履带式自动割草机障碍物检测[J]. 中国农机化学报, 2019, 40(5): 145-149. Feng Ji, Hu Jianing, Yu Jiaxuan, et al. Crawler automatic mower obstacle detection based on lidar information [J]. Journal of Chinese Agricultural Mechanization, 2019, 40(5): 145-149. [7]蔡怀宇, 陈延真, 卓励然, 等. 基于优化DBSCAN算法的激光雷达障碍物检测[J]. 光电工程, 2019, 46(7): 83-90. Cai Huaiyu, Chen Yanzhen, Zhuo Liran, et al. LiDAR object detection based on optimized DBSCAN algorithm [J]. OptoElectronic Engineering, 2019, 46(7): 83-90. [8]张文宇, 治瑜, 秦乐. 基于改进天牛群优化的DBSCAN聚类算法[J]. 统计与决策, 2022, 38(10): 20-25. Zhang Wenyu, Zhi Yu, Qin Yue. DBSCAN clustering algorithm based on improved beetle swarm optimization [J]. Statistics & Decision, 2022, 38(10): 20-25. [9]牛国臣, 王月阳, 田一博. 一种改进密度聚类的激光雷达障碍物检测方法[J].北京航空航天大学学报, 2023, 49(10): 2608-2616. Niu Guochen, Wang Yueyang, Tian Yibo. Lidar obstacle detection based on improved density clustering [J]. Journal of Beijing University of Aeronautics and Astronautics, 2023, 49(10): 2608-2616. [10]范晶晶, 王力, 褚文博, 等. 基于KDTree樹和欧式聚类的越野环境下行人识别的研究[J]. 汽车工程, 2019, 41(12): 1410-1415. Fan Jingjing, Wang Li, Chu Wenbo, et al. Research on pedestrian recognition in crosscountry environment based on KDTree and euclidean clustering [J]. Automotive Engineering, 2019, 41(12): 1410-1415. [11]孔德明, 段呈新, 巴特·古森斯, 等. 基于车载16线激光雷达的障碍物检测方法[J]. 计量学报, 2021, 42(7): 846-852. Kong Deming, Duan Chengxin, Bart Gusson, et al. Obstacle detection method based on vehicle 16line Lidar [J]. Acta Metrologica Sinica, 2021, 42(7): 846-852. [12]伍锡如, 薛其威. 基于激光雷达的无人驾驶系统三维车辆检测[J]. 光学精密工程, 2022, 30(4): 489-497. Wu Xiru, Xue Qiwei. 3D vehicle detection for unmanned driving system based on lidar [J]. Optics and Precision Engineering, 2022, 30(4): 489-497. [13]尚业华, 张光强, 孟志军, 等. 基于欧氏聚类的三维激光点云田间障碍物检测方法[J]. 农业机械学报, 2022, 53(1): 23-32. Shang Yehua, Zhang Guangqiang, Meng Zhijun, et al. Field obstacle detection method of 3D Lidar point cloud based on euclidean clustering [J]. Transactions of the Chinese Society for Agricultural Machinery, 2022, 53(1): 23-32. [14]Yan Z, Duckett T, Bellotto N. Online learning for 3D LiDARbased human detection: Experimental analysis of point cloud clustering and classification methods [J]. Autonomous Robots, 2020, 44: 147-164. [15]刘亮. 基于激光雷达的结构化道路环境感知及避障路径规划方法研究[D]. 西安: 长安大学, 2021. Liu Liang. Research on environmental awareness and path planning of structured road based on Lidar [D]. Xian: Changan University, 2021. [16]刘浩然, 范伟伟, 徐永胜, 等. 基于无人机激光雷达点云数据的单木分割研究[J]. 中南林业科技大学学报, 2022, 42(1): 45-53. Liu Haoran, Fan Weiwei, Xu Yongsheng, et al. Research on single tree segmentation based on UAV LiDAR point cloud data [J]. Journal of Central South University of Forestry & Technology, 2022, 42(1): 45-53. [17]赵星阳. 基于车载激光雷达的路面分割与障碍物检测关键技术研究[D]. 合肥: 合肥工业大学, 2021. Zhao Xingyang. Research on road segmentation and obstacle detection of autonomous vehicle based on Lidar [D].Hefei: Hefei University of Technology, 2021. [18]Tian Y, Song W, Chen L, et al. A fast spatial clustering method for sparse LiDAR point clouds using GPU programming [J]. Sensors, 2020, 20(8): 2309. [19]Mohd Romlay M R, Mohd Ibrahim A, Toha S F, et al. Novel CECBCE feature extraction method for object classification using a lowdensity LiDAR point cloud [J]. PloS one, 2021, 16(8): e0256665. [20]Nguyen H T, Lee E H, Bae C H, et al. Multiple object detection based on clustering and deep learning methods [J]. Sensors, 2020, 20(16): 4424. [21]Gamal A, Wibisono A, Wicaksono S B, et al. Automatic LiDAR building segmentation based on DGCNN and euclidean clustering [J]. Journal of Big Data, 2020, 7(1): 1-18. [22]Gao F, Li C, Zhang B. A dynamic clustering algorithm for LiDAR obstacle detection of autonomous driving system [J]. IEEE Sensors Journal, 2021, 21(22): 25922-25930. [23]張博闻. 面向开放场景的自动驾驶激光雷达目标检测技术研究[D]. 重庆: 重庆大学, 2020. Zhang Bowen. Research on automatic lidar target detection technology for open scene [D]. Chongqing: Chongqing University, 2020.
猜你喜欢
北京测绘(2022年5期)2022-11-22 06:57:43中国交通信息化(2021年8期)2021-11-02 05:26:02汽车观察(2021年8期)2021-09-01 10:12:41空间科学学报(2020年6期)2020-07-21 05:36:50甘肃科技(2020年21期)2020-04-13 00:33:38中国交通信息化(2019年1期)2019-03-26 06:43:46电子测试(2018年22期)2018-12-19 05:12:08电子制作(2018年16期)2018-09-26 03:27:00中国交通信息化(2018年7期)2018-09-14 02:55:02光学精密工程(2016年1期)2016-11-07 09:01:49