基于TRIZ理论的采茧机器人创新设计
2024-05-22 00:28:31王成军丁凡
中国农机化学报 2024年2期
王成军 丁凡
摘要:针对采茧机采茧质量差、效率低等问题,基于TRIZ理论设计一种采茧机器人。采用九屏幕分析法、组件分析法和因果轴分析法,得出采茧机效率低、质量差等问题的根本原因:存在下茧、适应性不足、顶杆维修效率低等;运用技术矛盾法、物理矛盾法和物—场模型法对采茧机存在的问题进行求解,创新设计执行器、姿态转换器、仿形压头及剔茧装置等关键部件,并结合实际工况完成采茧机器人的整机设计。利用有限元仿真软件,进行顶杆与仿形压头采茧试验,分析蚕茧的变形和动力学响应,结果表明:采用仿形压头采茧,蚕茧总变形最大值减少96%,等效应力最大值减少91.7%,等效弹性应变最大值减少88.2%。
关键词:采茧机器人;TRIZ理论;结构设计;有限元
中图分类号:S887.33
文献标识码:A
文章编号:20955553 (2024) 02024406
收稿日期:2022年7月11日 修回日期:2023年3月1日
基金项目:科学技术部创新方法工作专项(2018IM010500);安徽省新时代育人质量工程研究生学术创新项目(2022XSCX073);安徽理工大学研究生创新基金(2022CX2063)
第一作者:王成军,男,1978年生,江苏涟水人,博士,教授,博导;研究方向为智能机械与机器人、机械产品创新设计。Email: cumt1279@163.com
Innovative design of cocoon picking robot based on TRIZ theory
Wang Chengjun1, Ding Fan2
(1. School of Artificial Intelligence, Anhui University of Science and Technology, Huainan, 232001, China;
2. School of Mechanical Engineering, Anhui University of Science and Technology, Huainan, 232001, China)
Abstract:
Aiming at the problems of poor quality and low efficiency of the cocoon picking machine, a cocoon picking robot was designed based on TRIZ theory. By using a ninescreen analysis method, component analysis method and causal axis analysis method, the root causes of low efficiency and poor quality of cocoon picking machine were obtained, such as the existence of cocoons, inadequate adaptability and low maintenance efficiency of the ejector rod. The technical contradiction method, physical contradiction method and objectfield model analysis was used to solve the analyzed problems. The actuator, attitude converter, profile press and cocoon picking device and other key components were innovatively designed. Combined with the actual working conditions, the whole machine design of the cocoon picking robot was completed. The deformation and dynamic response of cocoons were analyzed by means of finite element simulation software. The results show that the maximum value of total deformation, equivalent stress and equivalent elastic strain of cocoons can be reduced by 96%, 91.7% and 88.2%, respectively by using the copycat pressing head to pick cocoons.
Keywords:
cocoon picking robot; TRIZ theory; structural design; finite element
0 引言
自20世紀70年代以来我国一直是世界上最大的蚕桑生产国,蚕桑产业是我国农业的支柱产业之一[1]。采茧是蚕桑产业中重要的环节,因方格簇养蚕能够有效提高蚕茧质量且成本低而在我国普遍应用,方格簇采茧主要为人工[2]。因单张方格簇含茧量大,且人工采茧效率低,时间长,导致蚕茧质量下降,自动化采茧亟须解决。目前,市面上已出现多种类型采茧机,刘莫尘等[3]设计一种直角坐标式自动采茧机,结合视觉系统能够有效识别、剔除下茧,但采茧效率极低,无法满足需求。王广瑞[4]设计的塑料折蔟采茧机利用双辊旋转剥离蚕茧,降低蚕茧损伤,但采茧辊会出现缠绕茧衣现象,影响采茧效率;马遥[5]设计的链式方格簇采茧机,优化了压头与孔格之间的匹配,减少了对方格簇的损伤,但不能剔除下茧,且只能适应水平姿态方格簇。
TRIZ理论是以解决工程问题为导向,主要用于结构设计与优化的方法学体系;运用TRIZ理论的创新性思维系统化分析问题,并通过结构化工具解决是实现创新设计的最有效方法[69]。
为解决采茧效率低、质量差等问题,基于TRIZ理论对采茧机系统的组件结构进行研究分析,利用九屏幕分析法提供研究思路;借助因果轴分析法和组件分析法,发现问题所在;同时借助技术矛盾法、物理矛盾法及物—场模型法完成关键部位创新设计;利用有限元仿真验证关键部位设计合理性。
1 基于TRZI理论的系统分析
1.1 九屏幕分析
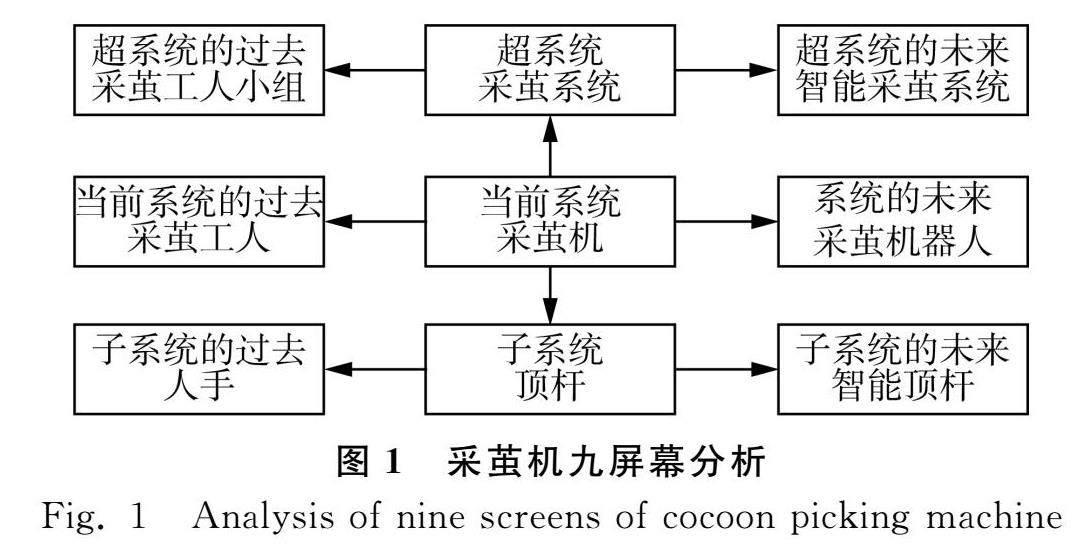
九屏幕法是“系统思维”方法,具有系统层次与时间两条轴线,系统层次为超系统、当前系统及子系统,时间轴为未来、现在及过去,两条轴线相互结合将发明者视野从“一个屏幕”扩展到“九个屏幕”。
为解决当前采茧机采茧效率不足问题,采用九屏幕分析法分析问题并提供解决思路如图1所示。最初采茧为工人手工采茧,采茧效率低、质量差,随着采茧机的研制与推广,工人操作采茧机采茧,有效提高工作效率,但随着时代的智能化发展,未来将会使用采茧机器人代替采茧机,采茧的关键部件也由人手发展成顶杆再到智能顶杆,整个采茧系统也发展成智能采茧系统,采茧质量、效率均有质的飞跃。
1.2 组件分析
运用组件分析法,从构成系统的组件入手,分清层级,建立组件相互关系矩阵,构建系统功能模型,找出系统问题所在。采茧系统的组成分为系统组件(机架、气缸、伸缩杆、采茧盘、顶杆、支簇架)、超系统组件(地面、人、方格簇、储茧箱),如表1所示。
结合采茧系统的功能组件分析表,分析各组件间的相互作用关系,得组件相互关系矩阵,表明各组件之间是否产生相互作用,如图2所示。进一步分析各组件间的作用功能,其中,人对方格簇、储茧箱具有运输作用,但运输效率低,运输功能不足;方格簇放置在支簇架上对支簇架有压迫作用,支簇架反过来支撑着方格簇,但方格簇存在变形,支撑功能不足;顶杆顶出蚕茧,并顶出过程中会造成蚕茧损伤,蚕茧对顶杆有反作用力,损伤属于有害功能最好能够避免产生。通过分析各组件间的作用关系和功能建立起采茧机功能模型,如图3所示。基于上述组件分析知:当前系统中,支簇架与其他组件交叉较少,并基于模型分析得支簇架功能可由储茧箱替代。
1.3 因果轴分析
利用因果軸找出采茧机采茧效率不足的根本原因,结合问题与根本原因之间的逻辑链中的薄弱环节,找出解决方案的切入点[10]。基于现有采茧机采茧效率不足开始推导,首先,方格簇内存在下茧,需要人工后续剔除,只保留上茧,采茧时存在下茧会导致后续分拣下茧时工作量增加,影响整体采茧效率;其次,现有顶杆采茧时会损伤蚕茧,将上茧变为下茧,顶杆是固定安装在采茧盘上无法拆卸,且一个采茧盘上安装有多个顶杆,当一个顶杆损坏时,需要更换整盘,维修不易;最后,方格簇存在水平放置和竖直放置两种姿态,现有采茧机只能适应水平放置方格簇,需要人工调整方格簇姿态,极大影响采茧效率,分析得出采茧机因果轴分析,如图4所示。
因果轴分析得出采茧机效率低的原因:(1)存在下茧,导致采茧质量下降;(2)采茧机只能适应水平位姿的方格簇,适应性不足;(3)采茧盘上的顶杆不可拆卸,顶杆维修效率降低;(4)顶杆对蚕茧损伤大。
2 双模态采茧关键部件设计
2.1 执行器设计
因果轴分析中顶杆维修效率不足的根本问题为采茧盘与顶杆是整体,顶杆磨损后,采茧盘依旧可用,那么采茧盘是否应该更换。可以运用物理矛盾解决问题。
2.1.1 定义物理矛盾
物理矛盾反映了唯物辩证法中的对立统一规律,矛盾双方存在的对立及统一的关系[11]。根据上述分析,明确冲突参数与物理矛盾的两种需求,如果顶杆与采茧盘作为一个整体,顶杆磨损后,采茧盘应该报废;采茧盘还可以继续使用,又不应该报废;确定冲突参数:可维修性。需求1:顶杆磨损后,需要更换采茧盘;需求2:为节约成本,不能更换采茧盘。
2.1.2 定义分离层级
为实现理想状态下高效率低成本维修顶杆,定义两种不同的系统层级:实现第一种要求的系统层级S1:在宏观层级上,顶杆和采茧盘作为一个整体,顶杆磨损后,采茧盘应该更换。实现两种要求的系统层级S2:在微观层级上,顶杆和采茧盘作为两部分,顶杆磨损后,采茧盘可以继续使用。
2.1.3 S1、S2交叉判断
基于上述分析,判断可知系统层级S1、S2不存在交叉,可使用系统层级分离原理,通过系统层级分离原理得出方案:使用可拆卸顶杆,安装在采茧盘上;并以此为理论支持设计出可拆装的推茧器。
2.1.4 执行器整体设计
结合上述分析所设计的推茧器,设计出基于气动的执行器,如图5所示,执行器包括T型座、气缸、导向杆、采茧盘及推茧器,T型座用于连接采茧机其他部件,推茧器通过螺钉安装在采茧盘上用于推取蚕茧,气缸安装在采茧盘与T型座之间,推动采茧盘做往复运动进而驱使推茧器作业,安装在T型座和采茧盘之间的双导向杆保障推茧器做直线运动。
1.采茧盘 2.导向杆 3.T型座 4.气缸
5.螺钉 6.推茧器
2.2 姿态转换器设计
基于因果轴分析,采茧机只能作业水平姿态方格簇,为适应竖直姿态方格簇,增加竖直姿态执行器,但提高了采茧装置的复杂性。得出技术矛盾:恶化参数为No.36设备复杂性;改善参数为No.35适应性及多用性、No.38自动化程度[12]。基于TRIZ理论得姿态转换器的矛盾矩阵表,如表2所示。
对表2中发明原理进行分析,根据各项发明原理理论并结合实际问题,筛选出10号(预先作用原理)、15号(动态化原理)原理作为创新理论支撑。
依据预先作用原理预先安置物体,使得推茧器对准竖直放置的方格簇,结合动态化原理将静止物体实现可动,创新设计出姿态转换器,进而在执行器上引入姿态转换器,使其能够适应多种位姿方格簇,姿态转换器包括横移导向套、上连杆、下连杆、把手等,如图6所示,执行器与横移导向套之间通过铰支座连接,并在T型座与横移导向套上分别安装上连杆与下连杆,并可通过把手使得执行器与横移导向套之间相互转动;当下一阶段作业的方格簇与当前的方格簇姿态不一时,人工通过姿态转换器预先将执行器调整至理想作业姿态。
1.上连杆 2.横移导向套 3.T型座 4.下连杆 5.把手
2.3 仿形压头设计
采茧机采茧时,顶杆末端接触蚕茧表面,将蚕茧顶出方格簇。此过程中,顶杆末端给予蚕茧一个冲击力,顶杆末端为刚性材料并为多平面式设计,会造成蚕茧表面损伤,影响采茧质量。为解决此问题,依据“九屏幕”分析法并依据人的指肚顶出蚕茧时,指肚变形的形状为灵感,提出解决方案:设计一款仿形压头代替顶杆末端安装在推茧器末端;如图7所示,仿形压头外形为内凹形,其轮廓曲线拟合蚕茧外表面,所用材料为复合硅胶,能低损伤顶出蚕茧。
3 剔茧装置设计
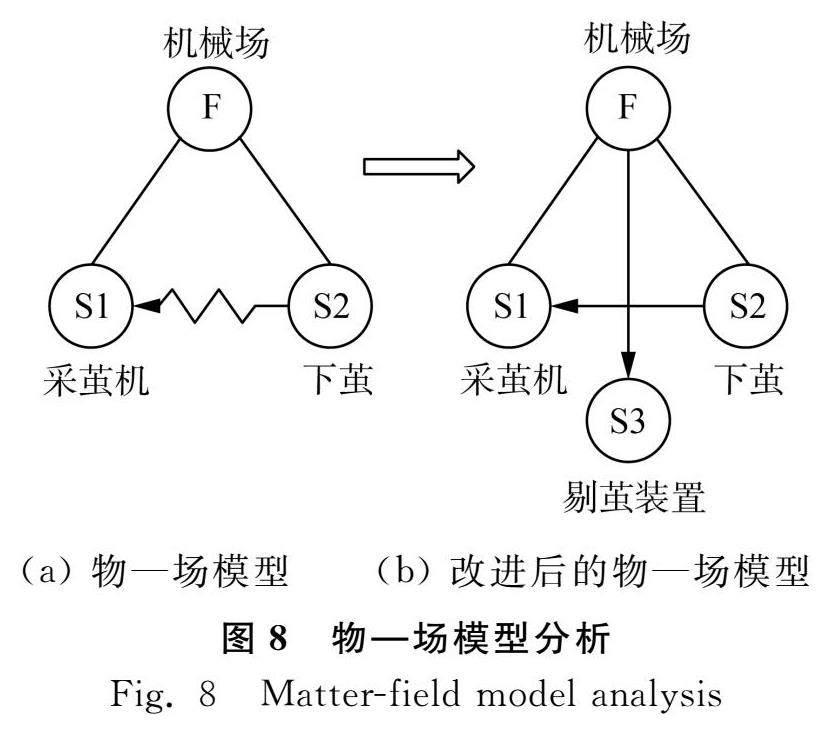
存在下茧会导致采茧效率不足,将问题点转化为物—场模型,如图8(a)所示,存在下茧会降低采茧机工作效率,因此物质S2下茧对物质S1采茧机产生了有害效应,属于“有害效应的完整物—场模型”[13]。根据实际工况,采用一般解法2:增加S3来阻止下茧降低采茧机工作效率,如图8(b)所示。得出解决方案:增加剔茧装置剔除下茧。
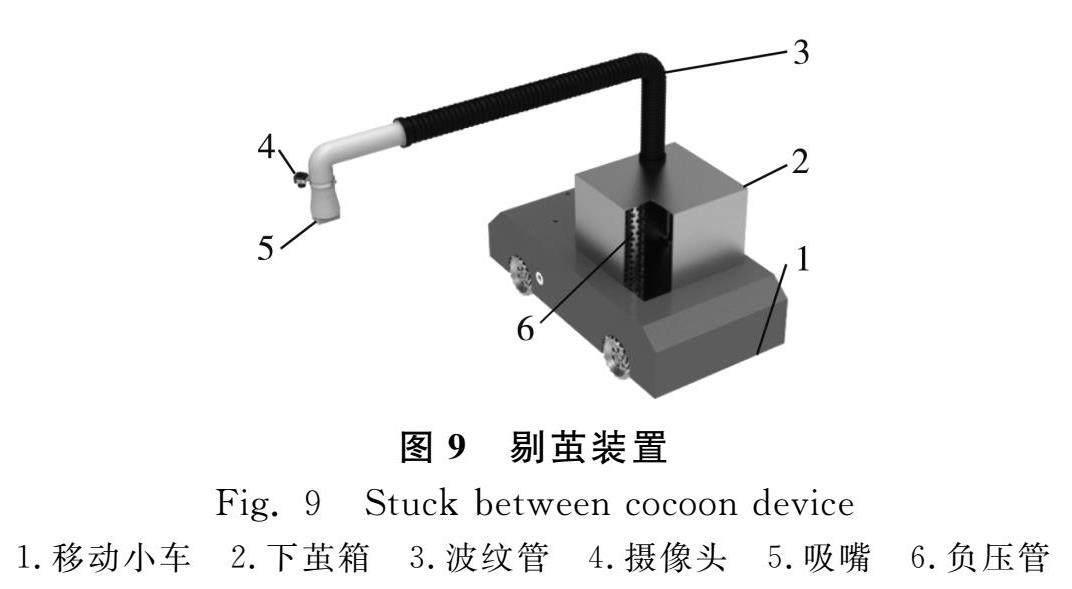
剔茧装置整体安装在移动小车上,剔茧装置包括吸嘴、摄像头、波纹管、负压管及下茧箱,如图9所示,负压管安装在下茧箱内,下方连通真空泵,波纹管安装在下茧箱上方,且不与负压管连通,波纹管末端安装塑料管,摄像头通过管箍锁紧在塑料管上,吸嘴安装在塑料管末端,且吸嘴设计成方形契合方格簇格子形状;剔茧装置工作原理为:首先摄像头检测出下茧,移动小车内的真空泵通过负压管在下茧箱内形成负压,吸嘴将下茧通过波纹管吸到下茧箱内。
(a) 物—场模型
(b) 改进后的物—场模型
1.移动小车
2.下茧箱
3.波纹管
4.摄像头
5.吸嘴
6.负压管
4 采茧机器人整体结构设计
设计出采茧机器人如图10所示。采茧机器人包括移动小车、剔茧装置、旋转升降装置、横移装置、姿态转换器、执行器。移动小车采用麦克纳米轮实现全方位运动,适用于通道狭窄的采茧房内;旋转升降装置通过转盘安装在移动小车上;横移装置安装在旋转升降装置顶部,通过电动推杆可实现横移装置升降;姿态转换器通过丝杆与光杆安装在横移装置上,可实现横向移动,姿态转换器与执行器之间通过T型座连接,横移装置与姿态转换器相配合可实现执行器的空间位姿调整,使得执行器水平采茧与竖直采茧两种模式相互转换、以适应不同姿态方格簇;剔茧装置安装在移动小车上,剔茧装置的波纹管两处折弯处分别通过管箍与旋转升降装置和执行器相连接,剔茧装置与执行器配合可剔除下茧,提高采茧质量,水平姿态方格簇可直接放置在储茧箱上进行采茧。
采茧机器人工作过程可分为以下几步:(1)通过移动小车、旋转升降装置、横移装置及姿态转换器将执行器调整至方格簇的左上角位置,且执行器与方格相互平行;(2)通过剔茧装置检测下茧并将下茧剔除;(3)执行器重新定位至方格簇的左上角,执行器开始作业,将蚕茧推至储茧箱内,完成采茧作业。
1.移动小车 2.剔茧装置 3.旋转升降装置 4.横移装置
5.姿态转换器 6.执行器 7.茧道 8.方格簇 9.储茧箱
5 采茧瞬态冲击仿真
模型导入有限元分析软件,顶杆末端面和仿形压头内凹面设定为接触从面,蚕茧上表面设定为接触主面。接触从面与接触主面有限单元大小近似,均采用四面体网格划分,定义各部件材料参数,仿形压头为Yeoh模型,顶杆为结构钢,蚕茧的密度为0.11×103 kg/m3,弹性模量为1.57 MPa,瞬时冲击速度定义为1 m/s[1415]。
仿真结果如图11、图12所示。由图11可知,顶杆采茧时,蚕茧总变形最大值为1.79 mm,等效应力最大值为2.56 MPa,等效弹性应变最大值为0.17 MPa,由图12可知,仿形压头采茧时,蚕茧总变形最大值为0.07 mm,等效应力最大值为0.21 MPa,等效弹性应变最大值为0.02 MPa。
对比分析蚕茧分别在顶杆与仿形压头采取时,所生成的最大总变形、最大等效应力、最大等效弹性应变,采用仿形压头采茧,蚕茧总变形减少96%,等效应力减少91.7%,等效弹性应变减少88.2%;仿形压头相较于顶杆能有效提高采茧质量,降低所采蚕茧中下茧数量,从而减少后续分拣下茧的工作量,提高采茧效率。
(a) 总变形云图
(b) 等效應力云图
(c) 等效弹性应变云图
(a) 总变形云图
(b) 等效应力云图
(c) 等效弹性应变云图
6 结论
1) 本文采用TRIZ理论对采茧机系统进行研究,通过分析采茧机的基本组成和功能模型,总结采茧机的不足,针对其采茧质量差和采茧效率低等问题,利用TRIZ的相关工具及解法对采茧机进行了改进设计。
2) 基于冲突解决原理设计了执行器与姿态转换器,提高了采茧效率;通过解决物—场模型问题设计剔茧装置,同时运用“九屏幕”分析法优化设计了仿形压头,提高了采茧质量;并结合实际工况完成采茧机器人的整机的结构设计,为后续样机制造提供了理论基础。
3) 执行器能够适应多种位姿方格簇,无需人工改变方格簇位姿,节省采茧时间;剔茧装置有效降低所采茧中下茧数量,减少采茧工序中分茧作业的工作量,进而提高总体采茧效率。
4) 使用有限元仿真软件模拟顶杆与仿形压头采茧时,蚕茧的变形量及动力学响应;相较于顶杆采茧,采用仿形压头采茧,蚕茧总变形减少96%,等效应力减少91.7%,等效弹性应变减少88.2%;验证了采茧机器人采茧能够有效降低蚕茧损伤,提高采茧质量。
参 考 文 献
[1]鲁成. 蚕桑产业发展趋势与战略——写在现代蚕桑产业技术体系建设“十二五”收官之际[J]. 蚕业科学, 2015, 41(5): 779-784.
Lu Cheng. Developmental tendency and strategy of sericultural industry: On the occasion of ending of modern sericultural industrys technological system construction during the Twelfth Fiveyear Plan Period [J]. Science of Sericulture, 2015, 41(5): 779-784.
[2]祁广军. “东桑西移”背景下广西蚕丝业发展实证研究[D]. 北京: 中国农业大学, 2013.
Qi Guangjun. An empirical study on the development of Guangxi silk industry in the context of “Sericulture Moving from East to West” [D]. Beijing: China Agricultural University, 2013.
[3]刘莫尘, 许荣浩, 闫筱, 等. 基于FCM及HSV模型的方格蔟黄斑茧检测与剔除技术[J]. 农业机械学报, 2018, 49(7): 31-38.
Liu Mochen, Xu Ronghao, Yan Xiao, et al. Detection and elimination of yellow spotted cocoon in mountage based on FCM algorithm and HSV color mode [J]. Transactions of the Chinese Society for Agricultural Engineering, 2018, 49(7): 31-38.
[4]王广瑞. 双辊采茧动力学仿真及折蔟采茧机的优化设计[D]. 泰安: 山东农业大学, 2019.
Wang Guangrui. Dynamic simulation of dual roller cocoon picking and optimal design of cocoon harvestor for plastic collapsible mountage [D]. Taian: Shandong Agricultural University, 2019.
[5]马遥. 链式方格蔟采茧机的研制与试验[D]. 泰安: 山东农业大学, 2021.
Ma Yao. Development of chain cocoon harvestor for checkered cocooning frame [D]. Taian: Shandong Agricultural University, 2021.
[6]刘练波, 方梦祥, 许世森, 等. 基于TRIZ理论的碳捕集工艺设计创新方案[J]. 中国电机工程学报, 2020, 40(20): 6625-6633.
Liu Lianbo, Fang Mengxiang, Xu Shisen, et al. TRIZbased design innovative solutions for carbon capture process [J]. Proceedings of the CSEE, 2020, 40(20): 6625-6633.
[7]Spreafico C, Russo D. TRIZ industrial case studies: A critical survey [J]. Procedia Cirp, 2016, 39: 51-56.
[8]Abramov O, Kogan S, MitnikGankin L, et al. TRIZbased approach for accelerating innovation in chemical engineering [J]. Chemical Engineering Research and Design, 2015, 103: 25-31.
[9]Sheu D D, Chiu M C, Cayard D. The 7 pillars of TRIZ philosophies [J]. Computers & Industrial Engineering, 2020, 146: 106572.
[10]王成軍, 李少强. 基于TRIZ理论的转盘式挤奶机器人结构设计[J]. 科学技术与工程, 2022, 22(7): 2770-2775.
Wang Chengjun, Li Shaoqiang. Design and analysis of a new rotary milking robot based on TRIZ theory [J]. Science Technology and Engineering, 2022, 22(7): 2770-2775.
[11]Lux S. Application of the TRIZ contradictory matrix to foster innovation for sustainable chemical engineering [J]. Chemie Ingenieur Technik, 2022, 94(8): 1071-1079.
[12]刘希光, 张静, 韩长杰, 等. 基于TRIZ理论的机械式打瓜排种器创新设计[J]. 中国农机化学报, 2021, 42(9): 31-36.
Liu Xiguang, Zhang Jing, Han Changjie, et al. Innovative design of mechanical melon precision metering device based on TRIZ theory [J]. Journal of Chinese Agricultural Mechanization, 2021, 42(9): 31-36.
[13]左斌, 陈艳军. 基于TRIZ理论的采摘执行器创新设计[J].中国农机化学报, 2021, 42(4): 22-27.
Zuo Bin, Chen Yanjun. Innovative design of picking endeffector based on TRIZ [J]. Journal of Chinese Agricultural Mechanization, 2021, 42(4): 22-27.
[14]Renaud C, Cros J M, Feng Z Q, et al. The Yeoh model applied to the modeling of large deformation contact/impact problems [J]. International Journal of Impact Engineering, 2009, 36(5): 659-666.
[15]谢启凡, 胡彬慧, 杨明英, 等. 家蚕茧及其茧丝和生丝的机械性能概述[J]. 蚕业科学, 2015, 41(6): 1120-1126.
Xie Qifan, Hu Binhui, Yang Mingying, et al. A review on mechanical properties of silkworm cocoon, cocoon filament and raw silk [J]. Science of Sericulture, 2015, 41(6): 1120-1126.
DOI: 10.13733/j.jcam.issn.20955553.2024.02.036
牛玉霞, 孫宙红, 任伟, 等. 基于分层特征对齐网络的小样本马铃薯病害叶片检测[J]. 中国农机化学报, 2024, 45(2): 250-258
Niu Yuxia, Sun Zhouhong, Ren Wei, et al. Fewshot potato disease leaf detection based on hierarchical feature alignment network [J]. Journal of Chinese Agricultural Mechanization, 2024, 45(2): 250-258
猜你喜欢
建材发展导向(2023年6期)2023-03-31 02:51:38
建材发展导向(2021年13期)2021-07-28 07:15:50
科技创新与品牌(2016年12期)2017-01-17 17:08:38
中国市场(2016年41期)2016-11-28 05:55:32
中国市场(2016年38期)2016-11-15 23:29:58
中国房地产业(2016年2期)2016-03-01 01:25:23
科技视界(2016年4期)2016-02-22 20:27:41
中国房地产业(2016年24期)2016-02-16 06:10:22
机械工程师(2015年10期)2015-02-02 01:14:03
机电产品开发与创新(2014年4期)2014-03-11 16:42:24