一种基于回旋凸轮机构的沙漠植树装置
2024-05-08 06:15刘茗元邢家旗周文平林凯熙梁耘菘
现代制造技术与装备 2024年3期
刘茗元 邢家旗 周文平 林凯熙 梁耘菘
(1.辽宁工程技术大学 机械工程学院,阜新 123000;2.辽宁工程技术大学 测绘与地理科学学院,阜新 123000)
传统的沙漠植树机械大多功能单一,仅能够实现沙漠钻孔的功能,如图1 所示。该植树机械功能单一,没有树苗自动分拣、传送以及灌溉功能,一般需要3~4 人协作使用。基于回旋凸轮机构的沙漠植树装置如图2 所示,它采用三角履带式行进机构,并将分拣、传送、钻孔、灌溉等功能集结一体,仅需一人将成捆的树苗放置在上方储苗斗中,便可完成全部的人工操作,之后通过机械实现自主巡航植树,可应用于沙漠、山地等多种地形环境[1-2]。

图1 传统的沙漠植树机械

图2 基于回旋凸轮机构的沙漠植树装置
1 装置的功能设计分析
本装置采用SolidWorks 软件进行三维建模,包括机械车主体、储苗斗、回旋凸轮盘、灌溉装置以及驱动电机等电气类元件的三维建模。利用SolidWorks软件的零件装配功能,合理组装各个零件、机构,并使用Motion 分析功能,充分考虑马达、弹簧、解除、引力、质量、材料属性及惯性等因素。经过多次实验分析,最终实现了沙漠自动化植树功能的模拟。基于回旋凸轮机构的沙漠植树装置主要包含储苗斗的自动分拣、凸轮圆盘的循环传送和扶正、双层套筒金属钻的螺旋钻孔以及阻沙伸缩植树筒的栽种4 大功能,可广泛应用于各种沙漠地形,完成自动植树工作。
1.1 储苗斗的自动分拣过程
储苗斗内部安装有分拣槽轮,其底部为条状开口,分拣槽轮通过同步带进行传动[3]。当需要植树时,分拣槽轮可转动至缺口处对应树苗,使得树苗落入缺口。分拣槽轮转动,储苗斗中的后一根树苗被分拣槽轮支撑,从而停止下落,而分拣槽轮缺口中的树苗则会被顺势甩至树苗分拣机构下方,进入后续的正苗接槽中。储苗斗部分核心结构如图3 所示。
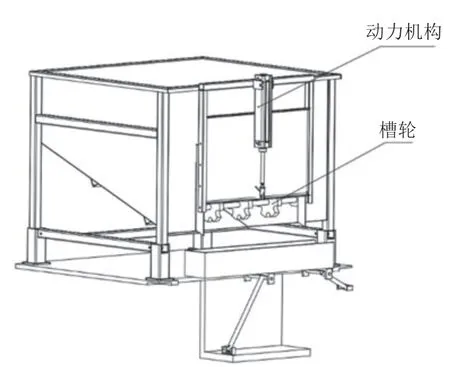
图3 储苗斗部分核心结构
1.2 凸轮传送和扶正过程
当树苗进入正苗接槽中后,被倾斜固定在接槽内的平面上,如图4 所示。中心圆盘带动10 个正苗接槽进行旋转,在旋转过程中,正苗接槽上的开孔与大圆上的凸台轨迹啮合,从而受到向内的力,如图5 所示。两个机械夹向内发生位移,对树苗轻微扶正,从而达到传送和正苗的目的[4]。正苗接槽三维建模图如图6 所示。

图4 树苗传送状态

图5 接槽与凸台轨迹啮合

图6 正苗接槽三维建模图
1.3 双层套筒金属钻钻孔过程
双层套筒金属钻由柱形钻筒、钻头、支架、握杆等零部件组成。当机械行进到树苗栽种位置时,金属钻头螺旋下降,可以在沙漠、山地等不同环境下快速钻出栽植树苗所需的孔洞。同时,柱形钻筒外壁上刻有刻度线,可以针对不同类型的树苗钻出不同深度的孔洞,有效提高了树苗的成活率。双层套筒金属钻核心结构如图7 所示。
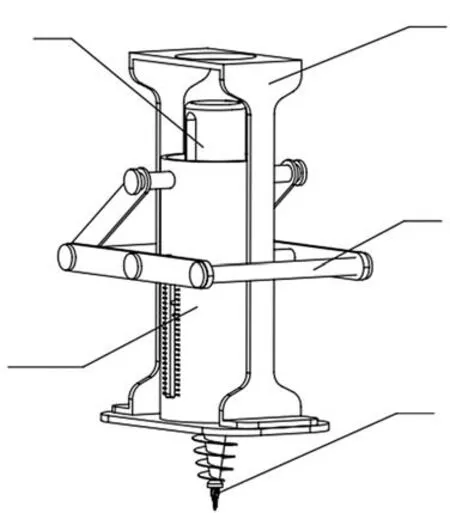
图7 双层套筒金属钻核心结构
1.4 阻沙伸缩植树筒栽种过程
阻沙伸缩植树筒由方形伸缩输送筒、五瓣锥形撑开器、电动推杆和支撑架等零件组成。当树苗从正苗接槽通过下方孔洞掉落到伸缩植树筒中时,伸缩植树筒为收缩状态。植树筒在电动推杆和自身重力的作用下向下插入已经钻好的孔洞,此时伸缩植树筒为伸出状态。五瓣锥形撑开器张开,树苗掉落孔洞中,电动推杆带动伸缩植树筒向上运动,同时五瓣锥形撑开器收缩,完成树苗栽种过程。阻沙伸缩植树筒核心结构如图8 所示。
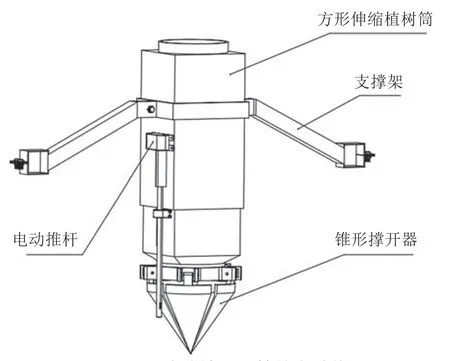
图8 阻沙伸缩植树筒核心结构
2 沙漠植树装置主要部件
2.1 凸轮传送机构
凸轮传送机构由正苗接槽、凸轮圆盘、链条、机械夹以及弹簧等零件组成。小型凸轮圆盘安装于传送机构中心处,且内部安装有电机。大型凸轮圆盘与小型凸轮圆盘同轴心安装,2 个凸轮圆盘外壁安装有滑动链条,其中11 个正苗接槽内嵌2 个圆盘之间。当电机提供电力时,滑动链条带动正苗接槽在2 个凸轮圆盘间转动,2 个机械夹向内发生位移,从而实现树苗的扶正和传送工作。凸轮传送机构核心结构如图9 所示。
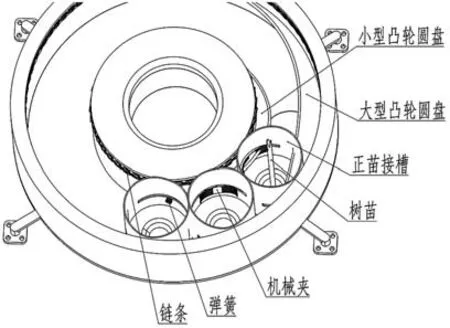
图9 凸轮传送机构核心结构
2.2 灌溉机构
回旋凸轮机构沙漠植树装置结构如图10 所示。
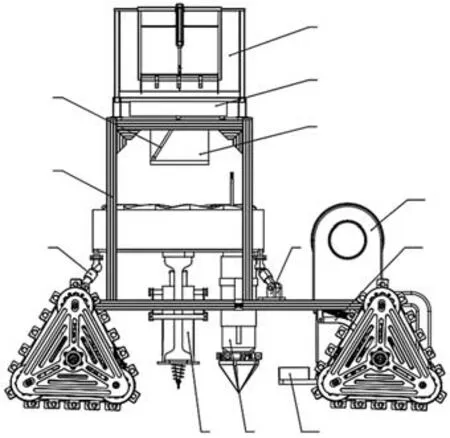
图10 回旋凸轮机构沙漠植树装置结构
在栽种装置后方安装有灌溉装置(见图11),其灌溉方式并非直接向栽种好的树苗浇水,而是通过预先在树苗两侧铺设水管,采用滴漏的方式进行灌溉。水管预先卷放在横向支架上,车在行进过程中通过控制弹簧的压缩量控制犁头耕出沟壕深度,水管随着车的行进和行走轮的碾压被填入沟壕,完成水管铺设作业[5]。
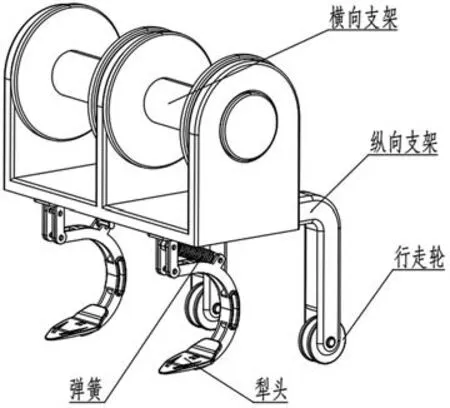
图11 灌溉装置局部图
3 凸轮圆盘的有限元分析
凸轮传送装置的凸轮圆盘部分材料采用Q235B,屈服强度为235 MPa,张力强度为390 MPa,弹性模量为210 GPa。通过使用SolidWorks 软件中自带的Simulation 功能,以大型圆盘为例,添加合适的约束和载荷并将模型网格化,通过运算分析得出相应的静态应力分布和位移分布,分别如图12 和图13 所示。由图12 可知,最大应力主要分布在凸轮拐角最大处,为1.11×104N·m-2,小于屈服强度,因此满足强度条件。分析图13 可知,凸轮拐角最大处有明显位移,且小于最大形变量2.221×10-6mm,同样满足刚度设计要求。
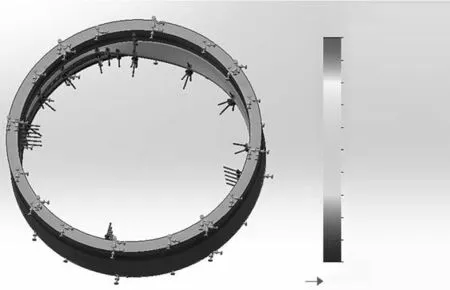
图12 凸轮圆盘的应力分析
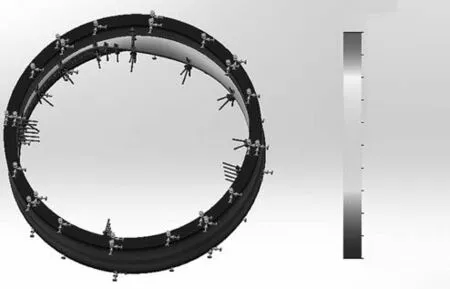
图13 凸轮圆盘的位移分析
4 结语
文章研究设计一种基于回旋凸轮机构的沙漠植树装置,不但能够实现拣苗、栽种、封土全自动化,还可以灌溉树苗,极大地提高了树苗在沙漠中的存活率,有效解决了目前沙漠植树机械功能单一,不能在沙漠、山地等多种恶劣环境中工作的弊端。
猜你喜欢
模具技术(2022年4期)2022-10-17
石材(2020年6期)2020-08-24
制造技术与机床(2019年8期)2019-09-03
精密制造与自动化(2018年1期)2018-04-12
西安航空学院学报(2018年1期)2018-02-05
制造技术与机床(2017年5期)2018-01-19
数学物理学报(2017年1期)2017-06-05
红蜻蜓·低年级(2017年3期)2017-03-30
山西大同大学学报(自然科学版)(2016年2期)2016-12-12
农产品加工(2016年16期)2016-09-27