
锥形水泥杆智能检测系统研究
2024-04-10 11:41吴碧春张余祥
现代制造技术与装备 2024年2期
吴碧春 刘 玲 张余祥 傅 健
(1.国网安徽省电力有限公司合肥供电公司,合肥 230041;2.安徽立翔电力技术服务有限公司,合肥 230041)
锥形水泥杆在我国经济建设过程中起到不可或缺的作用,但是质量较差的锥形水泥杆会因断裂和倒塌造成较大损害,甚至危及人身安全。为使锥形水泥杆符合建设要求,保障安全生产,需要检测其关键参数。国家电网有限公司对所用的锥形水泥杆执行国家标准《环形混凝土电杆》(GB/T 4623—2014)、行业标准《架空输电线路杆塔结构设计技术规定》(DL/T 5154—2012)、企业标准《配电网杆塔选型技术原则和检测技术规范》(Q/GDW 11256—2014)等[1]。
目前,水泥杆的质量检测方式以传统的人工检测为主[2-4],实施检测的设备质量参差不齐且精度不高。滞后的检测技术手段是检测过程中急需解决的弊端[5-6]。对此,文章基于工业自动化技术和人工智能技术,设计和研究锥形水泥杆智能化自动检测装置。该装置可以适应各种不同尺寸的锥形水泥杆的检测,减少传统人工检测存在的安全隐患,提高检测精度,填补我国锥形水泥杆自动化智能检测设备的空白,同时为水泥杆的生产自检环节提供数据,进而改善生产工艺,提升产品质量。
1 整体方案设计
设计的水泥杆智能检测系统可以自动完成几何量测量、受力挠度检测及水泥杆曲面裂缝宽度检测。整套检测设备包括控制系统和检测系统,在锥形水泥杆自动支撑抱夹及加载的基础上,引入基于机器视觉的三维重建方法,提高了检测的准确性和自动化水平。
图1 为整体自动化夹持、加载和机器视觉检测的原理,其中水泥墩A、B 提供伺服驱动机构在受力状况下稳定不变的测量平台和以轨道C 为施力基准的平台,S1、S2、S3均为伺服驱动机构,F1、F2、F3均为针对锥形水泥杆的垂直支撑机构。机器视觉系统D 能够沿着视觉精密位移控制平台E 移动,实现视觉拍照,并通过计算获得相关参数信息。
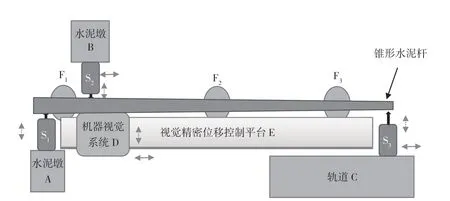
图1 整体自动化夹持、加载和机器视觉检测原理
根据锥形水泥杆的检测标准和要求,设计的智能检测系统包括5 个部分,即垂直支撑保持机构、水平夹持保持机构、机器视觉测量系统、视觉精密位移控制平台以及弯曲加载保持机构。
2 垂直支撑保持机构设计
检测时不同尺寸水泥杆的中心轴线需处于同一高度,以满足机器视觉精确检测的要求。因此,需要通过调整机构自动将水泥杆的轴线调整到同一中心高度,工作原理如图2 所示。首先根据需检测的锥形水泥杆的型号规格,自动计算不同垂直支撑点处所需的上升量,然后控制垂直升降伺服机构精确移动并具有可靠的承载力,其中F1位置固定,F2和F3可跟随锥形水泥杆的弯曲而移动。
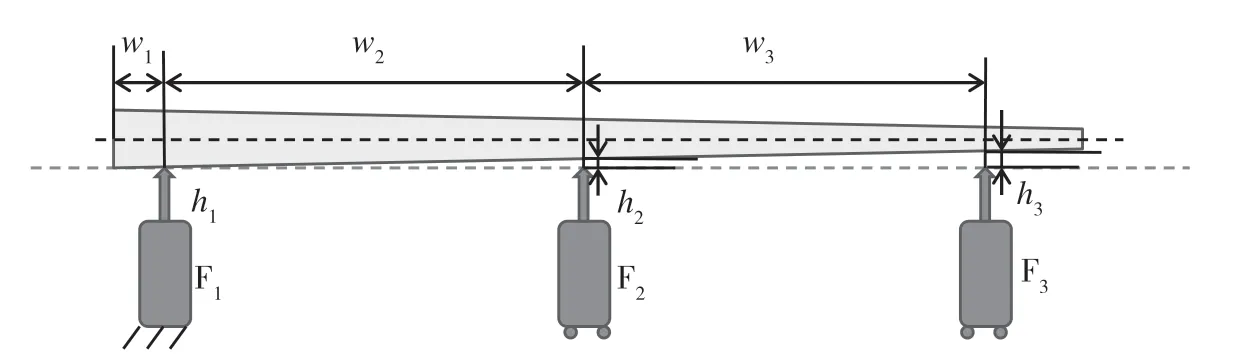
图2 垂直支撑机构自动工作原理
不同垂直支撑点所需的上升量hi的计算公式为
式中:i为垂直支撑机构所在位置对应的序号;ri为垂直支撑机初始位置相对水泥杆中心线的半径;r0为设计参考的水泥杆根部半径;wj为各支点间的距离。
3 水平夹持保持机构设计
大多数传统人工检测过程中,采用木块垫接的方式支撑两个支点[7],造成的累积误差较大。针对这个问题,设计根据锥形水泥杆规格参数自动水平方向夹持对中的机械结构。该结构具有力和位移感知功能,其工作原理如图3 所示。S1、S2为伺服位移驱动机构,S1固定在距离锥形水泥杆根部150 mm 处,S2可沿平移台移动,P1、P2为力感知模块。各支撑模块进行水平夹持对中时所需的进给量Sli的计算公式为
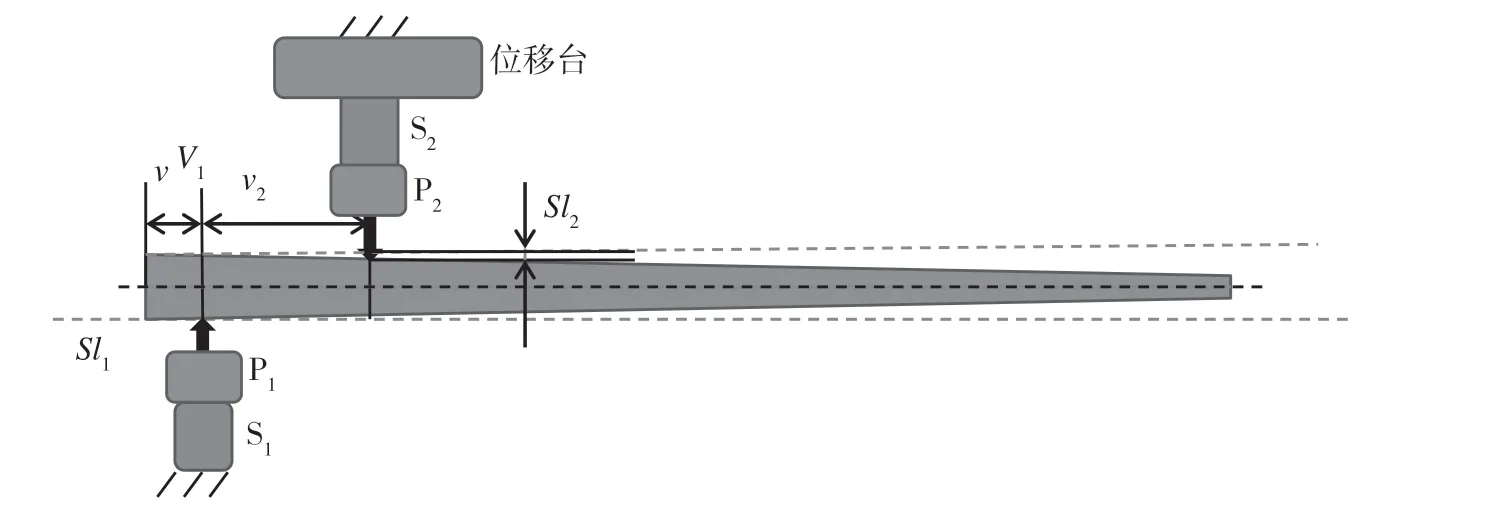
图3 水平夹持机构自动工作原理
式中:wn为各支点间的距离。
4 机器视觉测量系统设计
图4 为机器视觉测量系统,其作用是替代人工识别锥形电杆的不同特征的缺陷信息,主要具有两个功能。
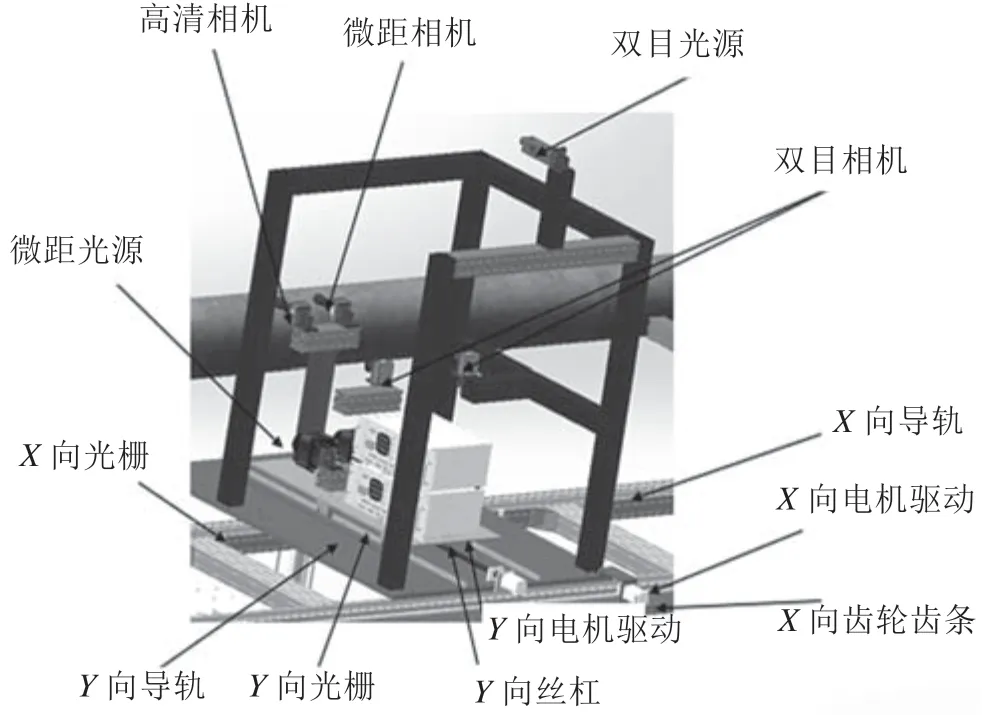
图4 机器视觉测量系统
一是大视场锥形水泥杆成像,检测电线杆形貌(直径和挠度)。首先,采用摄影测量中的三维点跟踪技术,对电线杆表面的一系列同轴投影点进行三维重建,获取投影点的中心坐标。基于这些点的坐标,拟合出当前圆柱面外部轮廓线的曲线方程,并求解轴心坐标和半径。其次,结合导轨移动拟合出水泥杆不同区域的轮廓曲线,从而构建出锥形水泥杆被测部分的完整三维模型,结合轴线位置测量电线杆直径、挠度。再次,搭建电线杆表面缺陷检测深度神经网络,在计算机的集成软件环境下,以PyTorch 为框架,编写表面缺陷检测神经网络,将采集到的电线杆表面缺陷数据集输入搭建的表面缺陷检测神经网络中进行训练。最后,在训练期间使用适合的损失函数和梯度下降算法优化网络模型,进行上千轮的训练,使网络损失收敛,得到最终的网络模型。该网络模型能够标出电线杆表面缺陷位置,且每个缺陷都附带分区信息。
二是检测弯曲时水泥杆的裂纹情况。进一步处理打标定位的裂缝目标,提取裂缝骨架线及其垂直向量,完成对裂缝的宽度测量,测量精度为0.01 mm。机器视觉测量系统的工作原理如图5 所示。
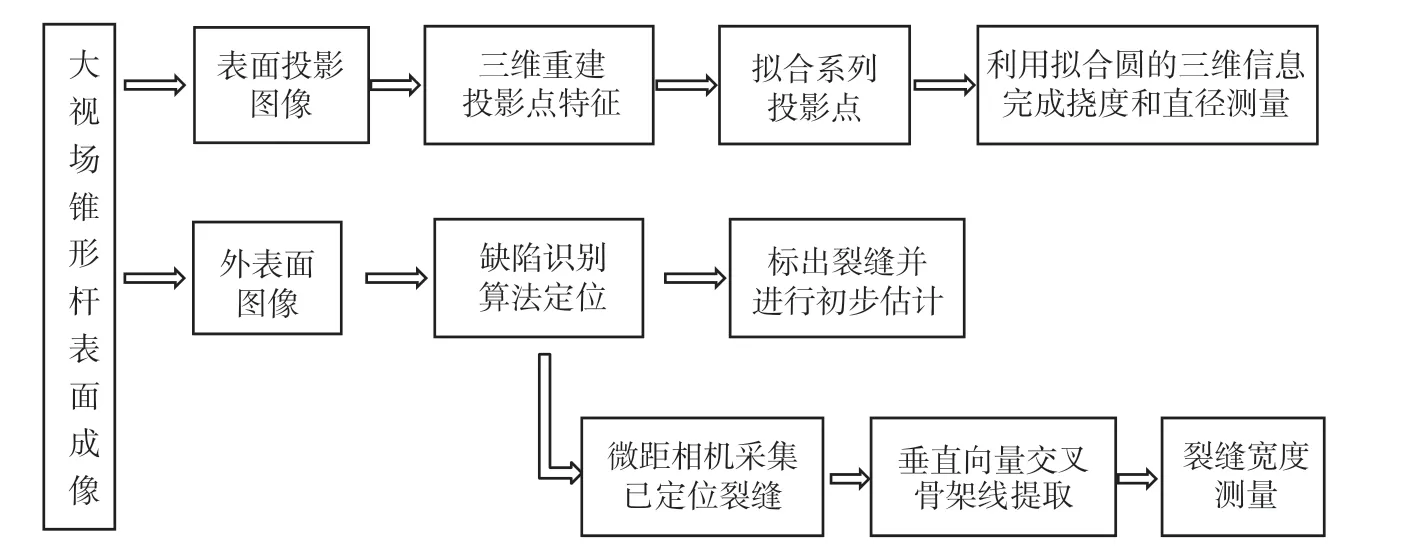
图5 机器视觉测量系统工作原理
5 视觉精密控制平台设计
视觉精密控制平台由X向导轨、Y向导轨、微距系统以及大视场系统等构成。在检测过程中,携带视觉测量系统的导轨机器人沿视觉精密控制平台行进,通过视觉测量系统,持续扫描锥形水泥电杆表面的缺陷(如裂缝)。当检测到锥形水泥电杆表面裂缝缺陷时,视觉精密控制平台会控制导轨机器人重复定位缺陷部位,精确测量锥形水泥电杆的裂缝。
6 弯曲加载保持机构
弯曲加力保持机构由X向导轨、弯曲加载基座、传感器等部分组成,能够自动对不同型号的锥形水泥电杆间歇性均匀地施力,并进行力学性能测试,内置的传感器实时监测受力状态,为检测人员和检测设备的安全提供保证。
7 结语
设计的水泥杆智能检测系统主要包括智能调节装置、自动检测设备、携带视觉测量系统的导轨行进机器人等。在设计过程中主要采用两方面关键技术。第一,高分辨率裂缝智能检测技术。通过该技术,携带视觉测量系统的导轨机器人能识别和检测裂缝宽度。第二,水泥杆标准化检测智能调节技术。各关键部位通过智能调节控制系统自动支撑、抱紧和施力。整套检测设备可以适应不同尺寸规格的锥形水泥杆的自动抱夹,无须人工干预,可提供精确的测量基准和力学测试基础,而且通过引入基于机器视觉的三维重建方法,提高了检测的准确性和自动化水平,使测试结果更加直观、可追溯。
猜你喜欢
环球时报(2022-07-13)2022-07-13
中学生数理化(高中版.高考理化)(2022年3期)2022-04-26
环球时报(2022-03-14)2022-03-14
昆明医科大学学报(2021年1期)2021-02-07
中国特种设备安全(2019年7期)2019-09-10
电影(2018年8期)2018-09-21
新能源科技(2018年10期)2018-02-15
中华老年口腔医学杂志(2016年5期)2016-03-01
中国继续医学教育(2015年5期)2016-01-07
天津大学学报(自然科学与工程技术版)(2015年10期)2015-12-29
