天玑骨科机器人辅助与传统切开复位内固定治疗跟骨骨折的临床对比研究*
2024-04-08 01:42徐俊华王子健纪振中
重庆医学 2024年6期
徐俊华,王子健,张 奕,纪振中△
(1.武汉科技大学医学院,武汉 430072;武汉科技大学附属普仁医院创伤骨科,武汉 430081)
跟骨骨折占全身所有骨折的2%[1],其解剖结构较不规则,通过3个关节面与距骨、跗骨相耦合,尽管近十几年来诊断与治疗技术有明显改善,但因跟骨骨折模式的复杂性及周围软组织与血运的局限性[2],术后长期负重疼痛、关节不稳定等并发症仍不可忽视,临床医师一直以来把跟骨骨折作为最复杂的骨折之一,如何进行手术治疗仍存在一定争议[3]。以往的手术方式通常为侧面扩大切口或者经跗骨窦下微创切口内固定治疗,两种方案各有其优势,但随着近年技术的发展,有研究者尝试使用机器人辅助手术治疗骨折[4],证实了机器人辅助手术有一定优势。武汉科技大学附属普仁医院创伤骨科自2020年起引进天玑Ⅱ代骨科机器人(北京天智航医疗科技股份有限公司)治疗跟骨骨折,取得了较好的效果,现报道如下。
1 资料与方法
1.1 一般资料
选取2020年4月至2022年10月期间武汉科技大学附属普仁医院创伤骨科收治的20例跟骨骨折患者为研究对象,根据手术方式不同分为研究组与对照组。研究组8例,男7例,女1例,采用天玑Ⅱ代骨科机器人辅助微创治疗,对照组12例,男9例,女3例,采用传统经跗骨窦切开复位内固定治疗。患者纳入标准:(1)闭合性跟骨骨折;(2)术前完善CT及三维重建检查;(3)受伤至手术时间(术前等待时间)<3周;(4)Sanders Ⅱ、Ⅲ型骨折;(5)未合并其他部位损伤。排除标准:(1)开放性跟骨骨折;(2)合并下肢骨折或重要脏器损伤;(3)术前等待时间≥3周;(4)合并周围软组织病变;(5)既往有跟骨骨折病史;(6)采取保守治疗者。本研究方案经武汉科技大学医学院附属普仁医院医学伦理委员会审核批准[(2022)年审第(022)号],患者及家属已签署知情同意书。两组患者年龄、性别、患侧、骨折分型差异无统计学意义(P>0.05),见表1。
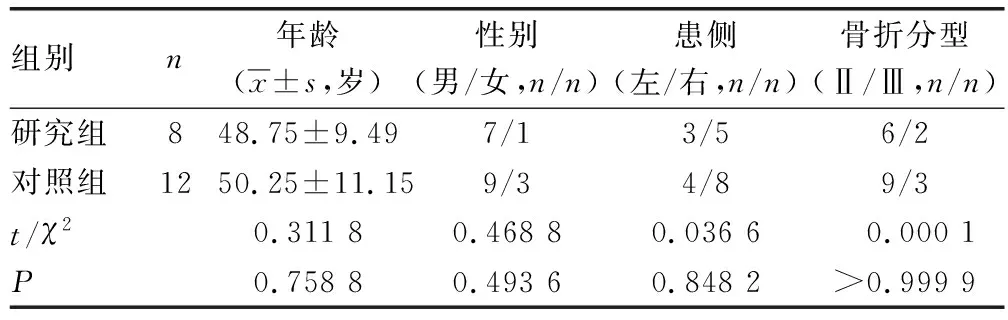
表1 两组患者一般资料比较
1.2 方法
1.2.1手术方式
所有患者术前常规行CT及三维重建检查明确诊断跟骨骨折及分型后在全身麻醉(1例)或椎管内麻醉下(19例)进行手术,手术体位均为侧卧位。研究组:麻醉成功后于跟骨结节处打入两枚克氏针撬拨、牵引同时配合手法挤压复位骨折端,移动式C臂X射线机(德国西门子股份公司)导航下确定骨折部位解剖复位后打入克氏针临时固定,于骰骨处打入克氏针以固定天玑Ⅱ代骨科机器人示踪器,以无菌保护套覆盖天玑Ⅱ代骨科机器人装置,连接天玑Ⅱ代骨科机器人导航装置,操作天玑Ⅱ代骨科机器人三维扫描提取跟骨影像资料,在其辅助下设计空心螺钉(天津正天医疗器械有限公司)进针方向、角度、长度等,沿机械臂所导航的方向打入导针,再次从冠状面、矢状面、水平面及三维透视角度确定空心螺钉位置,确认导针位置满意后用空心钻开孔,按照设计的方向、深度行空心螺钉固定,以普通丝线行皮肤全层缝合等,最后以无菌敷料加压包扎。对照组:麻醉成功后在外踝处作一斜形长切口,撬拨复位塌陷关节面并加以克氏针临时固定,从后跟处打入两克氏针配合手法挤压调整跟骨长度、宽度及轴线等,三维C臂X射线机导航下确定骨折端近解剖复位后打入数枚克氏针临时固定,定位后打入导针固定,C臂X射线机引导透视下确认导针位置满意后用空心钻开孔,打入空心螺钉固定,缝合切口并加以包扎。
1.2.2术后处理
两组术后24 h内预防性使用广谱抗生素,常规复查足部X线片,足踝部暂时避免负重。术后2周开始进行足趾屈伸训练与足泵训练。术后4周,可在外力辅助下行踝关节被动活动。术后6周时开始进行踝关节主动运动。
1.3 随访与功能评估
术后第3~6个月门诊或电话随访,记录患者手术切口愈合情况、患肢消肿情况及相关并发症(切口感染或不愈合、再骨折、下肢深静脉血栓、腓肠神经损伤)。通过美国骨科协会足踝外科分会(AOFAS)评分系统[5]进行功能评估,满分100分,其中疼痛40分,功能50分,力线10分,得分越高者情况越好,90~100分为优,75~<90分为良,50~<75分为可,<50分为差。
1.4 统计学处理

2 结 果
典型病例:患者男,34岁,不慎摔伤致左侧跟骨骨折,见图1。研究组住院时间、术前等待时间、手术切口长度、术中透视次数、术中出血量及术后3个月AOFAS评分较对照组明显缩短或降低,差异有统计学意义(P<0.05),两组骨折愈合时间大致相同且术后6个月AOFAS评分差异无统计学意义(P>0.05)。研究组手术时间长于对照组,差异有统计学意义(P>0.05),见表2。两组患者随访期间均未发生切口感染或不愈合、下肢深静脉血栓、再骨折、腓肠神经损伤等并发症。
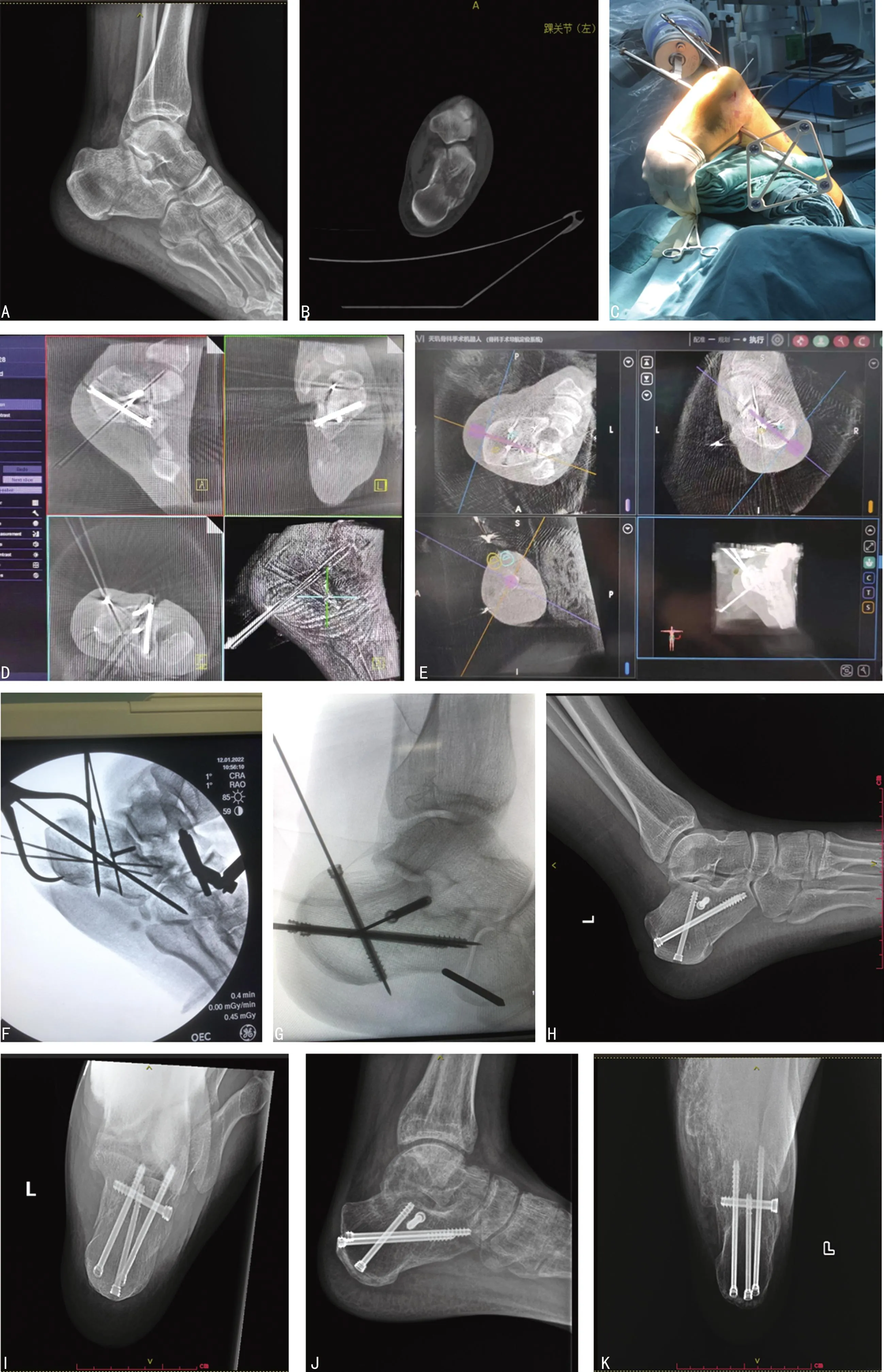
A:术前左跟骨侧位X线片;B:术前CT平扫,可见骨折分型为Sanders Ⅲ型;C:术中连接天玑Ⅱ代骨科机器人导航系统;D、E:术中使用天玑Ⅱ代骨科机器人导航系统进行空心螺钉路径规划;F:定位后打入导针,C臂X射线机透视位置满意;G:在规划路径下,天玑Ⅱ代骨科机器人精准打入空心螺钉,C臂X射线机透视结果满意;H、I:术后常规复查左跟骨X线片,内固定位置正常,骨折线清晰;J、K:分别为术后3个月复查左跟骨正、侧位X线片,骨折线愈合良好。

表2 两组患者手术及预后指标比较
3 讨 论
跟骨骨折为常见的跗骨骨折[6],对移位型骨折临床首选的治疗方法通常为手术治疗,旨在恢复关节面及跟骨形状、高度等,从而达到后期的功能康复[7],传统术式通常行侧面扩大切口以置入钢板或空心螺钉,但跟骨周围软组织薄弱、伤口血运条件不佳[8],扩大切口与过多的软组织剥离随之带来的伤口坏死、感染及腓肠神经损伤[9]等术后并发症不可忽视[10]。在微创技术与理念的不断发展下,微创治疗跟骨骨折成为目前流行的治疗方式[11],临床医师逐渐开始使用经皮复位内固定、经跗骨窦辅助复位内固定、关节镜辅助复位内固定等[12]方式进行手术,这些微创技术对跟骨附近皮瓣、软组织血运破坏较小,伤口并发症发生风险远低于传统扩大切口方式[13-14],但微创手术技术对临床医师的临床经验要求高[15],且在微创技术的运用中,往往面临着术中视野暴露不充分的问题,这对医师置入螺钉的精确性要求更高,同时可能造成术中多次透视及频繁调整螺钉,变向延长了手术时间,影响了其生物力学稳定性[4]。
武汉科技大学附属普仁医院创伤骨科近年来引进用我国自主研发的天玑Ⅱ代骨科机器人,经跗骨窦入路下利用三维C 臂 X 射线机扫描获取患者手术部位影像数据,规划空心螺钉路径,精准打入空心螺钉固定,避免了多次调整空心螺钉或导针,降低了术中需要的透视次数,减少了对患者的创伤与术中出血量。WANG等[16]同样使用机器人辅助手术治疗跟骨骨折,结果表明机器人手术方式相对传统扩大切口方式较好,借助这项技术,骨科医师可以更快、更精确、使创伤更小地置入螺钉。然而在实践中,术中往往因为操作系统、规划路线而花费更多的时间,这也是本研究中研究组手术时间长于对照组的主要原因,后期术者在熟练流程、掌握操作系统之后,手术时间应该会适当缩短;但该技术也有其局限性,因为其复位方式多为利用克氏针等牵引工具在体表手法复位,必要时辅助微创小切口[17],所以对于移位较大、骨折粉碎碎片过多的患者,不宜使用机器人行螺钉内固定手术,故本研究收录病例主要为Sanders Ⅱ型骨折[18]。
手术时机选择方面,跟骨骨折多为高能损伤导致,如高处跌落、纵向摔伤等,患者受伤后足踝周围皮肤及软组织多肿胀[19],仓促手术易造成术后局部皮瓣缺血坏死[20],传统L型切口开放手术术前通常需要等待1~2周,皮肤出现明显的褶皱为可以进行手术的指征[21],但经跗骨窦入路的方式切口较小,减少了局部软组织及血运的创伤,对于术前的软组织要求可以适当放宽,患者一般只需等待5~7 d即可进行手术治疗[22],无须刻意要求“褶皱”标准。
早期康复锻炼的理念在临床上越来越被认同,鼓励患者早期进行关节锻炼能预防卧床并发症的发生,SU等[23]在研究中指出,早期的功能康复在跟骨骨折的治疗中也相当重要。本研究中,在相同康复方案下研究组术后3个月AOFAS评分明显高于对照组,证明通过机器人手术能使患者在早期得到更好的功能康复。关于机器人手术疗效的问题,NOSEWICZ等[24]在meta分析中指出,经跗骨窦入路手术与传统侧面扩大切口手术两组的术后骨折愈合时间与Böhler角恢复大致相同。本研究中,研究组的骨折愈合时间、术后6个月AOFAS评分略优于对照组,虽然差异无统计学意义(P>0.05),但也肯定了两种治疗方案在临床上的治疗效果,若样本量更大,可能会发现更有意义的结果。
本研究将天玑Ⅱ代骨科机器人辅助下微创手术与传统经跗骨窦切开内固定手术方式进行队列研究,研究结果显示:与传统经跗骨窦切开复位内固定比较,天玑Ⅱ代骨科机器人辅助下微创治疗跟骨骨折有着更好的临床治疗效果,现将机器人手术优点总结如下:(1)降低了术后伤口相关的并发症发生风险;(2)减少了术者的射线暴露风险;(3)机器人术中精准规划路线,降低了螺钉偏移的概率;(4)机器人手术住院时间相对缩短,能使患者早期得到更好的功能康复;(5)相对低的学习成本与相对平滑的学习曲线,能让临床医师更好地掌握。本研究为单中心研究且样本量相对较少,需要进一步的多中心随机双盲对照研究证据,且随访时间较短,缺乏远期并发症等相关数据,需要进一步随访观察。
综上所述,骨科机器人辅助下微创手术治疗跟骨骨折相对传统切开复位手术有着并发症风险低,术中出血少,住院时间短,术中射线暴露风险小的优势,且患者在早期能获得更好的功能康复,可以在临床推广应用。
猜你喜欢
中国骨与关节杂志(2023年10期)2023-12-13
电脑爱好者(2021年19期)2021-10-13
电脑爱好者(2021年13期)2021-07-08
中华养生保健(2020年1期)2020-11-16
中国电子报(2020年2期)2020-03-26
反射疗法与康复医学(2017年7期)2017-01-16
医学教育管理(2015年3期)2015-12-01
实用手外科杂志(2015年4期)2015-08-27
中国实用医药(2014年27期)2014-09-04
河南医学研究(2014年10期)2014-02-27