
基于滑模观测器与径向基网络的电液位置伺服系统反步控制*
2024-03-26 02:30陈明和
机电工程 2024年3期
卢 彬,陈明和
(1.南京机电职业技术学院 机械工程系,江苏 南京 211300;2.南京航空航天大学 机电学院,江苏 南京 210016)
0 引 言
电液伺服系统具有高功率重量比、调速响应快和传动柔顺等突出优点,其在航空、船舶、冶金以及矿山机械等领域得到了广泛的应用[1-5]。但是,液压系统参数不确定性、高频难建模动态以及外界未知干扰等非线性多源扰动同样也加剧了电液系统控制器的设计难度,严重限制了其系统性能的提升。
针对阀控非对称缸三阶严反馈非线性状态空间模型,反步控制(backstepping control,BC)由于能够有效地处理系统的非匹配不确定性项,目前已成为电液伺服控制领域的一种基础设计方法,并与其他方法相结合,衍生出了如自适应鲁棒[6-7]、反步滑模[8]等控制策略。
为降低反步控制对系统精确模型的依赖,以及高增益反馈可能引起的系统不稳定性,结合干扰(状态)观测器的反步方法也已被广泛研究。
ZHENG Da-ke等人[9-10]设计了扩张状态观测器,估计系统的未知速度/压力状态和集总干扰。LI Yong等人[11-12]采用高阶滑模观测器,估计了系统的加速度信号与非匹配项外负载力,虽然对系统压力和加速度状态进行估计能减少系统设计成本;但其估计精度却严重依赖于观测器的设计增益。KIM W等人[13]提出了一种基于PI控制的模型参考观测器,能估计系统中的偏正弦扰动;但其适用范围较窄。LIANG Xi-chang等人[14]利用时延估计和一阶滤波器获取机器人模型中的匹配项未知建模动态;但其观测性能易受时延参数影响。
另外,为解决传统反步控制器中高阶虚拟控制量导数计算复杂性即“计算膨胀”的问题,YANG Xue-bo等人[15-16]运用了改进滑模微分器和渐消记忆滤波器,大大简化了控制器的计算量。进一步地,GUO Qing-yang等人[17-18]基于上述导数求解过程的计算偏差,分别采用了动态面控制和指令滤波器,并设计了相应的滤波误差补偿系统;但在提高电液系统位置跟踪精度的同时需谨慎地选择补偿参数。
在上述研究的基础上,为了进一步提高系统的控制性能,HAN Shuai-shuai等人[19]针对康复机器人系统集总扰动的时延估计误差,提出了设计RBF神经网络进行补偿。SHEN Wei等人[20]为提高阀控马达电液伺服系统的鲁棒性能,针对扩张状态观测器观测误差和动态面滤波偏差,进行了误差上界自适应补偿。李洪凤等人[21]将基于干扰观测器的永磁电机滑模控制与模糊逻辑结合,采用模糊辨识来逼近干扰观测器的估计误差和不可观测动态。
另外,结合分析的电液位置伺服跟踪系统控制器[22],针对设计所面临的状态/扰动估计偏差、虚拟控制量导数求解偏差等问题,部分学者还提出了干扰上界自适应控制策略[23-25];但这类方法若不对传统的基于符号函数的切换控制律进行光滑处理则很容易发生抖振,不利于控制器的实际应用。
径向基神经网络具有全局最优和快速收敛等特性,其在控制系统非线性函数逼近与模型辨识等领域得到了广泛应用。
因此,笔者为了提高阀控缸伺服系统的位置跟踪精度,首先,利用具有有限时间收敛特性的滑模观测器,估计未知速度状态和系统非匹配项集总扰动;然后,再针对反步控制设计中滑模观测器的估计偏差、指令滤波器计算偏差以及系统匹配项集总扰动等残余干扰,设计RBF神经网络进行自适应补偿,结合Lyapunov定理保证系统跟踪误差渐进收敛于原点附近的小邻域内;最后,基于电液伺服实验平台的仿真与实验,验证基于滑膜观测器和RBFNN反步控制方法的有效性。
1 电液伺服系统状态模型
对称阀控对称缸系统的简化模型如图1所示。

图1 液压伺服系统示意图
活塞杆组件运动受力平衡方程为:
(1)
式中:m为活塞组件质量;y为液压缸位移;Ap为液压缸作用面积;pL为液压缸两腔压降;Bp为油液黏性阻尼系数;f1为包括库伦摩擦、外负载等在内的未建模动态项。
液压油缸流量连续性方程为:
(2)
式中:QL为负载流量;Vt为包括管道容腔在内的总容积;Ctp为油液泄漏系数;βe为液压油有效体积弹性模量;f2(t)为时变扰动。
伺服阀流量方程为:
(3)
式中:pS为泵站油源压力;u为伺服阀控制电压;Kq为阀口流量系数;ρ为油液密度;sign(·)为符号函数,u≥0时,sign(u)=1;u<0时,sign(u)=-1。
(4)
式中:d1为非匹配项集总扰动,d1=f1/m;d2为匹配项集总扰动,d2=-4f2βe/Vt。
由于系统模型中含有不确定性参数m、Bp、βe、Vt、Ctp、Kq等,为不失一般性,笔者将上述参数均取为标称值,并将由此产生的建模偏差分别归入系统的匹配项扰动d2和非匹配项扰动d1中,得到包括建模偏差、未建模动态以及外界未知扰动等在内的复合干扰。
为设计系统控制器,先了解如下引理和假设:

(5)
式中:p为任意常数;t0为初始时刻。

由于工程中电液系统的实际参数通常为光滑连续有界的,因此,笔者将机械系统的不确定性d1和液压系统的不确定性d2及其二阶导数假设为连续有界是合理的。
假设2:系统跟踪参考轨迹yd为三阶连续有界。
2 控制器设计
针对上述电液伺服系统模型式(4)存在的未知速度状态及复合扰动,笔者首先设计滑模观测器,对未知状态和非匹配项总扰动进行在线估计;然后,设计递归反步控制并进行前馈补偿,利用二阶指令滤波器计算虚拟控制量导数,以简化传统反步设计中存在的“微分爆炸”问题,并根据系统的观测误差、滤波偏差及匹配项扰动,设计RBF神经网络进行综合补偿。
该控制器设计的整体结构如图2所示。

图2 电液控制系统总体框图
2.1 滑模观测器
为估计系统中不可测的速度状态x2和模型非匹配项集总扰动d1,笔者利用LEVANT A[26]提出的高阶滑模微分器构造如下三阶滑模观测器:
(6)
定义如下新的变量:
得到观测器的估计误差方程为:
(7)

(8)


2.2 RBF神经网络
径向基神经网络主要由输入层、隐含层和输出层构成,其网络结构如图3所示。
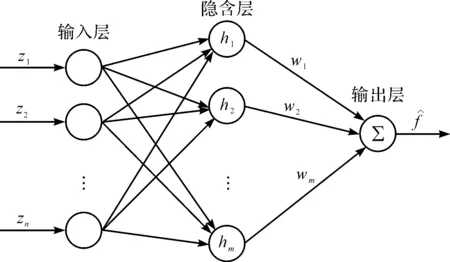
图3 RBF神经网络结构
对于任意连续光滑非线性函数f(z),定义网络输入为z=[z1,z2,…,zn]T,根据神经网络的万能逼近特性得到网络输出为:
(9)

高斯型径向基函数表达式为:
(10)
式中:cj为第j个基函数的中心向量,cj=[cj1,cj2,…,cjn]T,j=1,2,…,m;bj为径向基函数的宽度。
(11)
(12)
2.3 复合控制器设计
笔者根据建立的系统严反馈模型,利用反步递推方法设计控制器,定义系统的状态跟踪误差为:
e1=x1-xd,e2=x2-x2d,e3=x3-x3d
(13)
式中:x2d和x3d为待设计的虚拟控制量。
(14)
式中:k1为设计参数,k1>0。

(15)

(16)

(17)
式中:ξ1为滤波器传递函数的阻尼比,0<ξ1≤1;ωn1为滤波器传递函数的带宽,ωn1>0;s为Laplace算子。


(18)
(19)
Step3:对e3求导得到:
(20)
(21)
(22)


(23)
(24)
其中:
(25)


(26)


(27)
(28)
式中:η1,η2为自适应参数的估计增益,η1>0,η2>0。
2.4 稳定性分析
定理:由于存在未知状态和集总扰动的电液伺服控制系统式(4),基于滑模观测器式(6),在控制律式(21)和自适应律式(27)作用下,闭环系统是全局稳定的,且系统跟踪误差e1能够渐进收敛于原点附近的有界邻域内。
证明:选择闭环系统的Lyapunov候选函数为:
(29)
对V4求导,并代入式(27)、式(28)得到:
(30)
(31)
其中:φ=min{2k1,2(k2-Bpm-1),2k3,η2}。
(32)

3 仿真验证
笔者利用MATLAB/Simulink软件搭建控制模型,并进行仿真验证。
设计控制器主要由反步控制、扰动观测器和神经网络补偿三部分组成。为研究各部分对系统控制性能的影响,笔者分别采用反步控制器(BC)、反步+前馈控制器(feedforward backstepping controller,FBC)、反步+前馈+神经网络控制器(radial basis function feedforward backstepping controller,RFBC)进行对比。
同时,为保证对比的公平性,3种控制器均采用相同的控制参数。其中,滑模观测器参数为:μ1=2.6,μ2=2.5,μ3=1.1,μ4=0.17,Lp=1 142;反步控制器的参数为:k1=30,k2=10,k3=2;神经网络参数为:η1=2,η2=0.1,节点m=10;高斯基宽度b均为104,中心参数c均匀分布在[-2,1]×[-5 000,2 000]区域;指令滤波器参数为:ξ1=ξ2=0.7,ωn1=60,ωn2=40。
在实际工程中,电液伺服系统的参数具有不确定性或发生时变摄动,笔者给定了控制器设计依赖的系统模型参数标称值及其实际值,如表1所示。
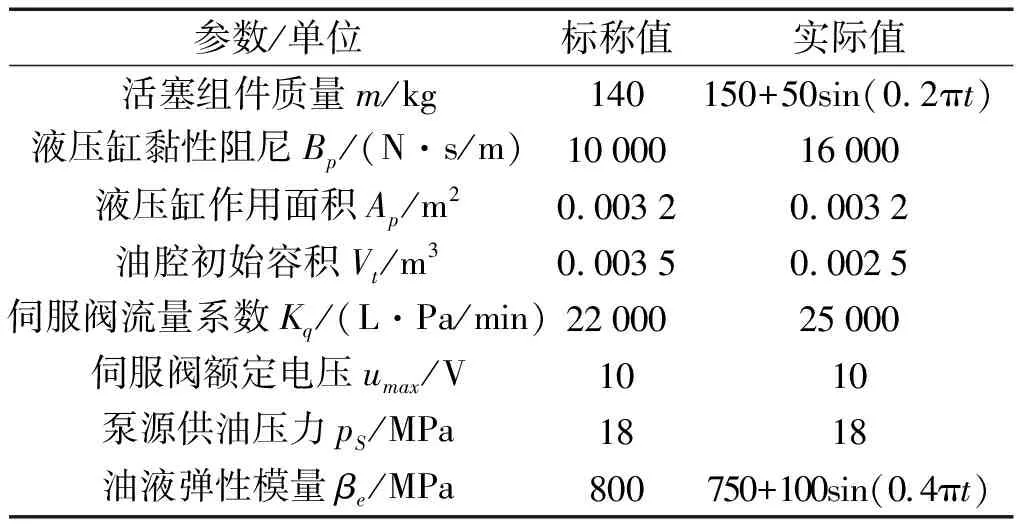
表1 系统模型与仿真参数
伺服系统的轨迹跟踪精度主要受传感器测量噪声、液压缸非线性摩擦力以及外界干扰等不确定性因素影响。在仿真中,笔者对系统采集的位移和压力信号分别叠加幅值为±0.05 mm和±300 Pa的随机白噪声信号。
最终得到的仿真结果如图4所示。
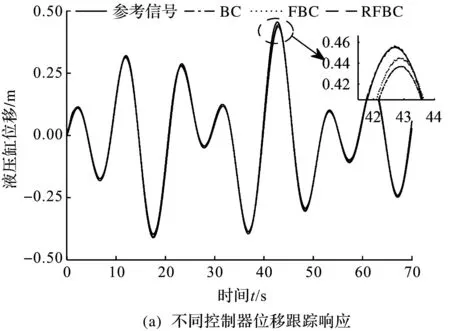
图4 仿真结果
由图4(a)和图4(b)可以看出:3种控制器都可以稳定地跟踪给定的混频参考信号;当没有扰动补偿时,传统的反步控制器具有较大的跟踪偏差。
由图4(c)可知:当加入干扰观测器后,采用的滑模观测器可以对模型非匹配不确定性项和外部扰动进行准确估计,在反步控制器中进行前馈补偿后,一定程度上减小了系统的稳态跟踪误差。为进一步考虑滑模观测器对快变扰动的观测误差、滤波误差以及流量泄漏等系统残余扰动,笔者设计了RBF神经网络进行二次补偿,更进一步地改善了系统的跟踪精度,显著地降低了系统跟踪误差,并且系统控制信号光滑连续无抖振,从而降低了传统反步控制器对高增益反馈的需求。

由仿真结果可知:闭环系统的所有信号均是有界的,可以验证基于滑膜观测器和RBFNN反步控制方法的有效性。
4 实验验证
4.1 实验平台
为进一步验证基于滑膜观测器和RBFNN反步控制策略的实用性,笔者利用实验室搭建的电液伺服作动器模拟平台开展实验研究。
液压伺服作动器实物图如图5所示。

图5 液压伺服作动器
其中,测控系统包括计算机监控程序和测量硬件,上位机开发基于MATLAB/Simulink中Xpc/Target快速原型技术,下位机采用台湾研华公司生产的UNO-3000G型工控机,上位机与下位机之间通过TCP/IP协议进行通讯;A/D信号采集板卡采用Advantech PCI-1716L,D/A控制信号输出板卡采用Advantech PCI-6208;实验时系统采样时间设为定步长1 ms。
实验台的关键设备参数如表2所示。
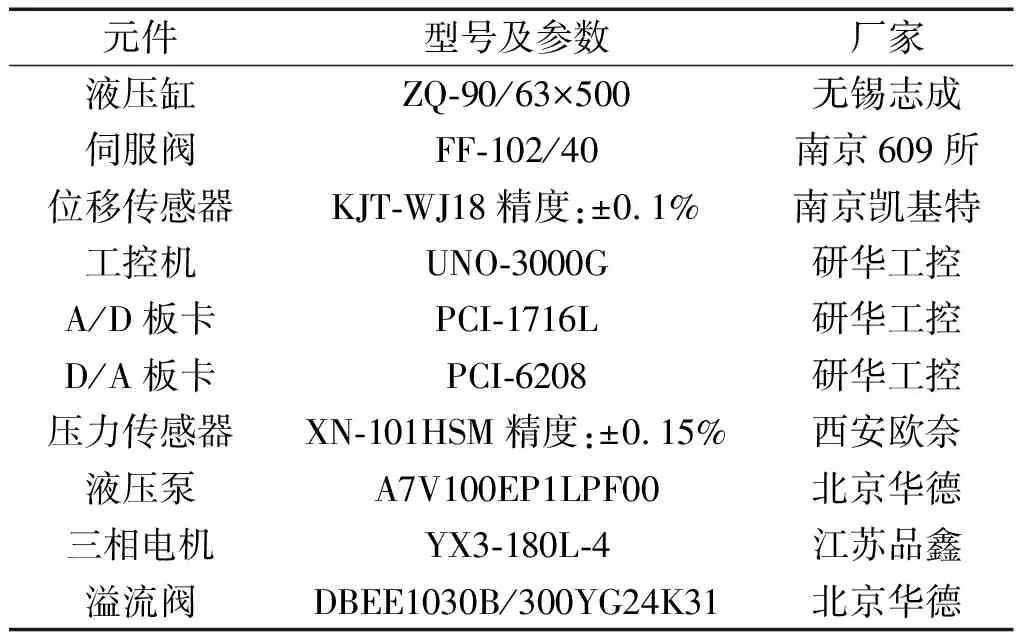
表2 实验台关键参数
笔者采用下面3种控制方法进行对比实验。
C1——基于滑模观测器的神经网络反步控制器(RFBC)。该控制器参数根据仿真模型参数进行调试优化,其中滑模观测器参数为:μ1=2.6,μ2=2.5,μ3=1.1,μ4=0.17,Lp=1 142;反步控制器参数为:k1=50,k2=22,k3=5;神经网络估计器参数为:η1=1.2,η2=0.05,节点m=10,高斯基宽度b均为104,中心参数c均匀分布在[-4,2]×[-8 000,8 000]区域;指令滤波器参数为:ξ1=ξ2=0.7,ωn1=60,ωn2=40。
C2——基于干扰观测器的反步控制器(FBC)[24]。利用线性干扰观测器代替滑模观测器,估计系统的非匹配项集总扰动d1,其中干扰观测器设计成:
(33)
其中,给定观测器增益μ5=120,其余控制器参数同C1。
C3——工程中广泛应用的PI控制器。其中控制器的比例增益设为kp=120,积分增益为ki=50。
4.2 实验结果
上述3种控制器对混频参考轨迹的跟踪实验结果如图6所示。

图6 实验结果
图6(a)和图6(b)为3种控制器的跟踪响应与跟踪误差的对比曲线,可以明显看出:
控制方法C1实现了更好的跟踪效果。
方法C3受系统多源扰动的影响,即使采用了较大的控制增益也不能抑制干扰的影响,并且由于积分的超调作用,导致传统的PI控制器在系统换向时将出现明显的跟踪滞后。
方法C2利用所建模型的有用信息对系统的参数不确定性及未知扰动等进行了前馈补偿,相较基于无模型的PI控制性能得到了一定提升,但系统残余扰动仍然限制了其性能的进一步提高。
图6(c)为笔者采用的滑模观测器(high gain sliding mode observer,HSMO)与传统线性干扰观测器(disturbance observer,DOB)对系统非匹配项集总扰动d1的在线估计,可以看出:两者的估计效果比较接近,这间接表明设计的观测器能够实现对系统非匹配项扰动的实时有效估计,从而降低传统反步控制器的稳态跟踪误差。
图6(d)为C1方法的系统控制电压,控制电压在±10 V范围以内且较为光滑无抖振,有利于控制系统的实际应用。
图6(e)为神经网络估计器对应的系统补偿电压,结果表明笔者设计的神经网络自适应补偿控制律能够保证系统信号的有界稳定,在基于传统扰动观测器的反步控制基础上进一步提升了系统的控制性能。
最后,笔者采用统计学中常用的评价指标(跟踪误差最大值Me、跟踪误差平均值μ和跟踪误差均方值σ)定量对比不同方法的控制效果。
跟踪误差对比结果如表3所示。
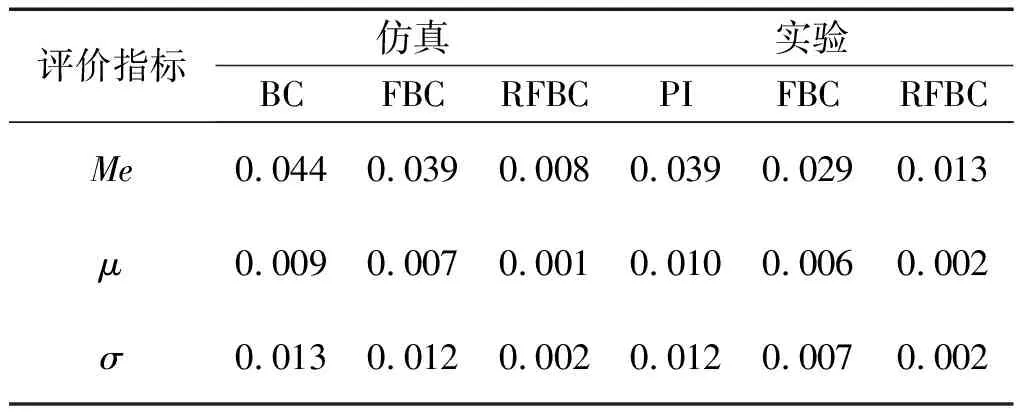
表3 跟踪误差对比
从表3中数据对比可以看出:在数值仿真阶段,与传统的反步、反步+前馈控制器相比,RFBC控制器跟踪误差最大值Me分别降低了81.8%、79.5%;跟踪误差平均值μ分别降低了88.9%、85.7%;跟踪误差均方值σ分别降低了84.6%、83.3%。
在实际试验阶段,与传统的PI控制器和基于扰动观测器的反步控制方法相比,RFBC控制器跟踪误差最大值Me分别降低了66.7%、55.2%;跟踪误差平均值μ分别降低了80%、66.7%;跟踪误差均方值σ分别降低了83.3%、71%。
由此可见,笔者提出的基于滑模观测器的神经网络反步控制方法能够有效降低多源不确定性扰动对系统性能的影响,从而进一步地提高了电液伺服系统跟踪精度。
5 结束语
电液控制系统具有广泛的应用背景,但系统固有的参数不确定性和外界未知干扰等非线性多源扰动严重限制了其性能的提升。为提高传统阀控缸电液位置伺服系统的控制精度,笔者提出了一种基于滑模观测器与RBF神经网络的反步控制方法,并对该方法的鲁棒性和抗干扰性进行了仿真分析和实验验证。
研究结论如下:
1)建立了阀控对称缸电液伺服系统的非线性严反馈数学模型,将系统参数不确定性、未建模动态及外界未知干扰等视为集总扰动,并进行了补偿;
2)提出了一种基于滑模观测器的RBF神经网络反步控制方法,利用滑模观测器处理系统的非匹配项集总扰动,采用RBF神经网络逼近滑模观测器的观测误差、匹配项集总扰动等系统残余扰动;
3)仿真和实验结果表明,该控制方法能有效克服多源不确定性扰动对系统跟踪性能的影响,与传统的PI控制器和基于扰动观测器的反步控制方法相比,其实验跟踪误差最大值Me分别降低了66.7%、55.2%,跟踪误差平均值μ分别降低了80%、66.7%,跟踪误差均方值σ分别降低了83.3%、71%。
参数整定是控制器设计的重要环节,因此,在后续的工作中,笔者将针对控制器参数多目标优化与灵敏度分析展开研究,以期进一步提升电液位置伺服系统的控制性能。
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02
化工管理(2021年7期)2021-05-13
装备制造技术(2020年3期)2020-12-25
中国惯性技术学报(2019年6期)2019-03-04
测控技术(2018年4期)2018-11-25
测控技术(2018年3期)2018-11-25
专用汽车(2016年4期)2016-03-01
铁道科学与工程学报(2015年5期)2015-12-24
深空探测学报(2015年3期)2015-12-07
电测与仪表(2015年19期)2015-04-09
