
基于深度测距的移动机器人自适应跟随
2024-03-21 01:49沈绍博杨长春刘小峰
计算机工程与设计 2024年3期
杨 彪,王 狄,沈绍博,杨长春+,刘小峰
(1.常州大学 微电子与控制工程学院,江苏 常州 213164;2.河海大学 物联网工程学院,江苏 常州 213022)
0 引 言
室内外环境的复杂性为移动机器人的精准跟随提出了挑战。为了更好地完成行人跟随任务,需要精确测量人-机距离[1,2],根据距离和偏航角调整机器人运动状态,从而鲁棒地跟随行人。
为了准确测量前人距离,研究人员使用多传感器融合的方法来检测和跟踪行人[3,4]。Tripathi等[5]使用超声波和红外传感器跟随指定行人。随着激光雷达技术的发展,可以实现远距离人体目标的测距[6,7]。Chebotareva等[8]基于激光测距仪和单目相机的数据融合方法,提出了人体跟踪算法。Zhu等[9]使用毫米波雷达和单目相机的信息感知环境,使机器人以预期的距离跟踪人体目标。毫米波雷达和激光雷达可以直接获取目标位置,但是两者成像分辨率低,难以区分物体边界,而多传感器融合方法因其高昂的售价难以在移动机器人中普及[10]。
本文基于低成本的RGB-D相机,搭建了移动机器人平台,提出了一种基于MRSD测距的移动机器人跟随系统,主要工作在于:①本文引入Mask R-CNN算法[11]对行人进行实例分割,根据行人掩膜从深度图像中提取深度像素点,测量行人距离。②针对深度伪影问题,当前工作多使用传统滤波算法[12],导致测距精度低。本文引入S2R-DepthNet网络[13]从彩色图像中推理深度,替换相机深度图像中的无效点,提高测距精度。③针对深度融合的测距信息,建立基于Sage-Husa自适应滤波器的测距模型,抑制量测异常值的影响,从而使得移动机器人能够更加鲁棒地跟随行人。
1 算法理论基础
1.1 实例分割算法
实例分割是计算机视觉领域经典任务之一。在移动机器人领域,实例分割可以分析场景,检测场景中的不同实例并完成像素层面的分类。随着深度学习技术的发展,科研工作者相继提出了Faster R-CNN[14]、Cascade R-CNN[15]和YOLO系列[16,17]网络模型。相比于传统目标检测算法,上述网络模型在准确性有着显著优势。但是,上述算法的目标检测框无法准确分离物体的前景和背景,从而降低深度测距精度。因此,本文引入Mask R-CNN模型,检测场景中的行人目标,获得行人掩膜。
通过预训练的RPN获得行人目标检测框、使用ROIPool从检测框中提取特征,在进行分类和边界框回归的同时输出二进制掩膜。在具体训练过程中,分类损失函数Lc和边界框回归损失函数Lb的运算如下
(1)
(2)
其中,s是分类器预测的softmax概率分布,u为目标真实类别标签,tu为预测回归参数,v为真实目标边界框参数。
Mask的损失函数Lm为
Lm=-ylog(p(x))-(1-y)log(1-p(x))
(3)
式中:p(x) 是模型输出,y是真实标签。
与单任务网络相比,多任务网络共享特征提取层参数,从而减小模型参数和计算量,完成检测和分割任务。
1.2 单目深度估计算法
单目深度估计网络的任务是预测彩色图像中像素的深度值。S2R-DepthNet模型借鉴了人对场景的三维感知的特点,重点关注彩色图像物体的空间结构,结合深度注意力模块预测彩色像素的深度信息。S2R-DepthNet模型可以分离彩色图像结构信息并提取互补的高层语义,抑制与深度无关的信息,从而增加深度推理的准确性。
具体过程如下:输入彩色图像,通过结构提取模块分离彩色图像中不变的结构信息,生成结构图,真实深度为T,损失函数如下所示
(4)
式中:T′是预测的深度值,p是深度像素索引,Δx和Δy是深度图的水平和垂直算子,α和β是超参数。
结构图中包含了大量与深度无关的低层信息,会降低深度估计的精度。而利用深度注意力模块产生的深度注意力图,优化结构图,输出预测深度图,从而提高深度估计质量。注意力图和深度预测的损失函数为
(5)
2 基于MRSD测距的跟随系统
本文搭建了一个移动机器人作为行人跟随的平台,提出的基于MRSD测距的移动机器人跟随系统的运行流程,如图1所示,主要包含MRSD测距算法和行人跟随控制两个部分。首先对输入的彩色图像进行目标检测;然后深度融合测距模块获取人-机距离,根据目标距离建立Sage-Husa自适应卡尔曼预测和测量方程输出距离信息;最后,当人-机距离与设定距离不等时,通过PID控制器输出相应角速度和线速度,驱动小车跟随行人移动至设定距离后,若行人继续运动,小车持续跟随行人,否则,小车停止运动。

图1 机器人跟随系统流程
2.1 MRSD测距算法结构
本文提出的MRSD测距算法包含两个部分:行人检测和深度测距,如图2所示。具体流程为:将彩色图像输入Mask R-CNN和S2R-DepthNet网络,前者用于检测行人,获取行人前景掩膜;后者用于推理深度图像。根据掩膜从深度图像中提取行人区域深度点,使用推理深度图像替代相机深度图像中的无效点,从而精确计算人-机距离。下面分别介绍MRSD测距算法的两个模块。

图2 MRSD测距算法结构
2.1.1 行人检测
行人检测既是深度融合测距的前提,又是移动机器人感知环境的基础[18]。YOLOv5虽然可以快速检测行人,但目标检测框会选中图像的背景像素,导致深度测距精度降低。因此,准确表示行人区域,对于测量人-机距离至关重要。本文引入Mask R-CNN网络准确分割行人区域并输出前景掩膜。定义输入彩色图像X,则掩码Y的公式如下
Y=Mask(X,Ws)
(6)
式中:Mask()表示预训练的Mask R-CNN网络,Ws表示权重矩阵。
Mask R-CNN结合Faster R-CNN和FCN的功能,前者用于提取特征,随后在特征图上,利用分类器鉴别的候选ROI并检测行人;后者利用卷积和去卷积操作,对每个像素分类后得到行人掩膜,从而准确分割行人前景和背景。同时为了降低误判率,本文设置算法的行人置信度为0.92。
2.1.2 深度融合测距
行人运动速度的动态变化,导致人-机距离也随之变化。若移动机器人能精确测量人-机距离,就能通过控制算法控制其运动状态,准确跟随行人。在跟随行人的过程中,由于行人运动状态的不确定性和RGB-D相机的成像限制,移动机器人不可避免地产生距离误差。深度测距误差原因通常来自于两个方面:不准确的目标检测框以及深度图像中无效像素值,前者可以通过Mask R-CNN输出行人掩膜解决;后者指深度图像中距离为0的深度像素点。
为了降低无效深度点对测距精度的影响,本文首先定位相机深度图像中深度无效点的位置,然后提取单目深度估计网络推理的深度图像对应位置的距离,最后完成像素替换,从而提高测距精度,完成行人跟随任务。定义结构提取模块的编码器、解码器,前者将彩色图像X映射到潜在空间[19],后者生成结构图Ms。由于结构图中存在大量无用的低维信息,S2R-DepthNet将注意力机制与结构图结合,消除低维信息对深度估计的影响,进一步建立彩色像素和深度像素的映射关系。
深度注意力模块中的编码器使用扩展残差网络[20],用于增加编码器网络的感受野。在解码器后增加sigmoid函数,输出深度注意力MA。S2R-DepthNet的推理深度为
Tt=f(Ms×MA)
(7)
式中:f()表示深度预测模块。
RGB-D相机的深度图像存在深度伪影的固有问题,若直接使用相机深度图像测量人-机距离,会降低测距精度,进而降低移动机器人跟随的稳定性。因此本文引入单目深度估计网络,弥补相机深度图像中的无效像素点。在获得行人掩膜后,融合相机深度和推理深度,计算人-机距离。定义Pli表示相机深度图像的行人区域第i个像素点的距离,Pti表示S2R-DepthNet网络推理深度图像的行人区域第i个像素点的距离,测量人-机距离Edis的公式如下所示
(8)
(9)
其中,Pi表示融合后行人区域第i个像素的距离;n表示行人掩膜区域的深度像素的总数量。
2.1.3 偏航角计算
偏航角φ表示为行人目标偏离相机视野中间位置的角度,如图3所示。在行人跟随过程中,人-机距离Edis和偏航角φ共同决定移动机器人的运动状态。在相机的成像平面中,行人目标偏移距离所占像素PQ误差小,相机焦距f为固定值,由两者计算得到的偏航角具有较高的准确性[21,22]。
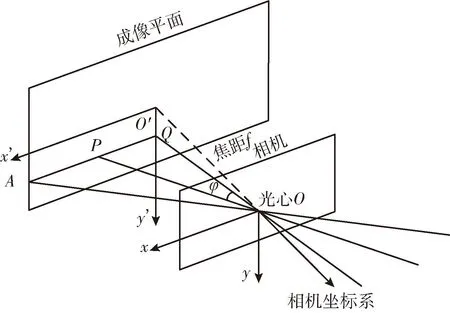
图3 偏航角计算模型
定义P是人体中心点,其坐标为(Px,Py),O是相机光心,AQ是彩色图像宽度的一半,ζ是AO与QO之间的角度,则偏航角φ为
(10)
2.2 跟随与运动控制
2.2.1 系统模型建立
在行人跟随过程中,距离信息受光照变化、行人和移动机器人速度的影响较大,导致测量距离存在较大波动的问题。基于此,本文使用卡尔曼滤波算法对测距值进行平滑处理,使得测量距离更加趋近真实值,从而驱动移动机器人更加平稳地跟随前人。卡尔曼滤波算法将加速度建模为随机噪声,使用人-机距离、速度和加速度作为状态变量,其中人-机距离p由观测得到,速度为v,加速度为a,那么移动机器人在k时刻的状态向量
X=[pva]T
(11)
系统的状态方程和观测方程如下
(12)
式中:Xk是目标k时刻的状态向量;Zk是观测向量;Fk,k-1是状态转移矩阵;Hk是观测矩阵;Wk-1和Vk分别是状态预测过程和观测过程的高斯噪声且相互独立。状态转移矩阵F为
(13)
式中:T代表采样时间。
由于本文只有人-机距离一个观测量,故设置观测矩阵H为
(14)
2.2.2 Sage-Husa自适应滤波器
测距系统常采用卡尔曼滤波算法进行运动控制,但在滤波过程中,若噪声特性时变,易发生滤波发散和精度降低的现象。因此,本文引入Sage-Husa自适应滤波器(SHAKF),减小时变噪声的影响,测距系统的状态空间方程见式(12)。
常规卡尔曼滤波假设系统的量测噪声具有稳定性,但在实际应用中,时变的量测噪声对滤波效果影响较大。若能够实时推理系统的量测噪声协方差矩阵Rk,就可以防止滤波发散,提高滤波精度。系统的新息公式为
(15)
由上式可得新息协方差矩阵为
(16)

(17)
式中:b为渐消因子,一般取0.9,故量测噪声协方差矩阵Rk为
(18)
联合上式,Sage-Husa自适应滤波公式为
(19)
式中:Pk-1和Pk,k-1分别是k-1时刻和k时刻的状态估计协方差;Qk是k时刻的过程噪声协方差;Kk是k时刻的卡尔曼增益。针对距离信息受光照条件和行人速度变化大的问题,Sage-Husa自适应滤波能够有效降低测距误差,提高距离测量的精度,从而增加移动机器人跟随的平顺性。
2.2.3 行人跟随控制
当移动机器人获得行人的距离和偏航角后,需要控制器驱动移动机器人,完成行人跟随任务。
PID控制器能够减小测量位置和设定位置之间的误差,使得移动机器人能够快速稳定跟随行人运动。同时,PID控制器能够避免机器人移动速度过快导致人-机碰撞危险。因此,本文选择PID控制器作为移动机器人的运动控制模块。
PID控制器以测量距离和偏航角作为输入,以线速度和角速度作为输出,驱动车轮电机跟随行人。本文设置跟随距离为0.6 m,设置偏航角为0°。本文所使用的离散式PID控制器的计算公式为
(20)
(21)
其中,v和w分别表示PID输出的线速度和角速度;ed(k) 和ew(k) 分别为k时刻的距离偏差和角度偏差;ed(k-1) 和ew(k-1) 分别为k-1时刻的距离偏差和角度偏差;KP、KI和KD分别为速度PID的比例系数、积分系数和微分系数;Kp、Ki和Kd分别为角度PID的比例系数、积分系数和微分系数。
当距离和偏航角与设定值产生误差时,PID控制器中的比例控制快速响应,积分控制用于消除过去累计的误差,微分控制用于提高系统动态性能指标,输出线速度和角速度。PID控制器能够使得移动机器人与目标人体保持合适的相对位置,达到理想的跟随效果。
3 实验结果
3.1 实验平台搭建
本实验的硬件平台由乐视LeTMC-520RGB-D相机、NVIDIA Jetson Xavier、STM32控制器和驱动电机组成,如图4所示。本文选择乐视RGB-D相机作为视觉传感器,通过深度测距使得机器人能以设定的距离跟随目标移动。将MRSD算法部署在NVIDIA Jetson Xavier上,既可以配合RGB-D相机测量距离和偏航角,又可以连接STM32控制直流电机,完成行人跟随任务。

图4 移动机器人硬件
测试数据:本文使用RGB-D相机在室内环境中采集图像数据和深度数据,采集的图像分辨率为640×480,行人和相机间的真实距离由卷尺手工测量。由于无法实时获得人体目标和移动机器人的真实距离,本文设置移动机器人和人体目标保持静止状态。每隔0.6 m测量人体目标的实际距离,并保存此位置的20张彩色图像和深度图像。由于深度相机存在距离越远误差越大的限制,本文将距离测量范围设置为0.6 m至4.8 m,并将测量范围划分为7个区间,方便后续距离误差测试。
评价指标:本文使用位移误差Derr(displacement error)评价机器人和目标之间距离的精度。位移误差由实际距离Rdis(real distance)和测量距离Edis计算可得
Derr=Rdis-Edis
(22)
3.2 销蚀实验
本文提出了一种基于MRSD测距的移动机器人跟随系统,引入MaskR-CNN实例分割算法和S2R-DepthNet单目深度估计网络,提高深度测距的精度。为评价不同网络模块的作用,在测试数据上进行销蚀实验。MRSD测距算法销蚀实验结果见表1,与目标检测算法相比,实例分割算法能大幅提高深度测距精度。在加入单目深度估计算法后,在测试数据上的平均误差相较于之前降低了40.6%,取得更好的测距效果。

表1 MRSD测距算法销蚀实验结果
3.3 人-机测距定量分析
测量人-机距离是移动机器人跟随系统领域的热点话题。传统方法通过YOLOv5算法检测行人,由于无法准确获得行人区域的深度点,导致人-机距离测量不精确。本文以深度图像为基础,结合行人检测和深度融合算法,提高人-机距离的测量精度。
为了验证本文方法的测距性能,选取了如下方法对比:YL和YLX表示YOLOv5和YOLOX[23]的目标检测框的测距方法;IS表示Mask R-CNN的实例分割的测距方法;Fu等[12]表示使用传统数字滤波处理深度图像的实例分割的测距方法;IS_S2R和IS_RMS表示S2R-DepthNet和R-MSFM[24]的深度融合的测距方法;Ours表示本文提出的测距方法。
本文使用测试数据上8个位置进行实验,采用位移误差指标衡量人-机测距的精度,如表2所示,本文算法由于引入了Mask R-CNN网络和S2R-DepthNet单目深度估计网络,抑制深度无效点对深度融合测距的影响,提高了人-机测距的精度。

表2 人-机距离误差比较
3.4 Mask R-CNN测距方法定性分析
本文引入Mask R-CNN算法,获得行人掩膜,并根据掩膜信息提取行人区域的深度像素点,计算人-机距离。因此,检测算法的输出形式决定了行人区域的表示准确度,从而影响人-机测距的精度。YOLOv5的深度测距方法误差较大,且随着距离的增加误差逐渐增大,如图5所示。本文引入的Mask R-CNN在人-机距离较近时,深度测距的精度较高。但在人-机距离较远时,受限于RGB-D相机成像素质和深度图像中的无效深度点,测距误差逐渐增大。

图5 不同算法测量距离与实际距离对比结果
受到光线的影响,YOLOv5算法误检和漏检,无法准确选中行人,影响深度测距的精度,如图6所示。Mask R-CNN由于应用了ROlAlign策略,可以实现像素级别的分割,使其能够获得较高的行人检测准确率。所以本文引入Mask R-CNN算法分割人体目标的效果较好。

图6 YOLOv5和Mask R-CNN行人检测
3.5 深度融合测距方法定性分析
深度可视化结果如图7所示,图7(a)场景中相机深度图像出现无效点,而S2R-DepthNet算法因加入了结构一致性模块,其推理图像具有深度连续性,避免出现无效深度点。图7(b)场景中深度相机由于受到室外的强烈光照和人-机距离过远的影响,其深度图像像素点的距离为0,而S2R-DepthNet推理深度图像能够获得人-机距离。但相比于相机深度图像,推理深度的距离并不精确。在室外场景中,通过深度融合算法可获得大致人-机距离信息,从而提高移动机器人跟随系统的鲁棒性。因此,本文在近距离使用Mask R-CNN的测距方法;在远距离时使用深度融合测距的方法,将单目深度估计后的深度图像替换无效深度点进行深度测距,最终提高深度测距的精度。

图7 室内室外彩色图像和深度图像可视化
3.6 Sage-Husa自适应滤波算法评估
在室外走廊环境中进行行人跟随实验并采集人-机距离,采样频率为7 Hz,历时142 s,共采集994个图像序列。由于光照强度变化,乐视深度相机采集的距离信息存在野值。以ZED相机输出的距离信息作为真实值,对比传统卡尔曼滤波算法、检测野值的卡尔曼滤波算法和SHAKF算法的测距精度。
本文将不同卡尔曼滤波算法输出距离数据与真实值对比,采用均方根误差RMSE来量化算法的性能指标,公式为
(23)
式中:n是图片帧的数量;Mi是第i个图像帧的距离估计值;Gi是第i个图像帧的距离真实值。
3种算法在行人跟随过程中第500~600帧的距离对比曲线如图8所示,第39帧距离信息发生异常,传统卡尔曼算法出现了滤波拖尾的现象,影响下一帧的距离估计值。而当过滤异常值后,SHAKF算法可以快速计算量测噪声协方差,获得更为精确的距离信息,提高移动机器人跟随系统的鲁棒性。

图8 500~600帧距离对比
3种算法在行人跟随过程中第500~600帧的距离均值误差对比曲线如图9所示。与传统卡尔曼滤波和过滤野值的卡尔曼滤波相比,SHAKF算法的均值误差更小,可以提高算法的测距精度,进而使得移动机器人能够更加鲁棒地跟随行人,对应的RMSE见表3。
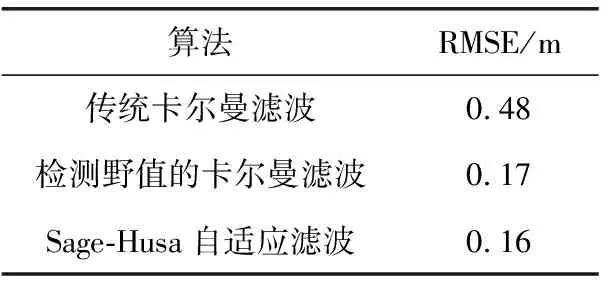
表3 3种算法的均方根误差
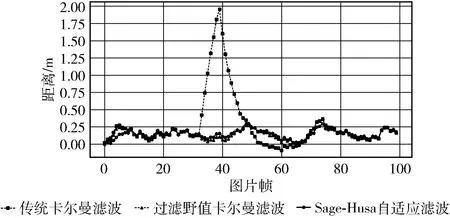
图9 500~600帧距离均值误差对比
在本文的实验场景中,实验环境为Ubuntu18.04,软件环境为ROS机器人操作系统,硬件平台由阿克曼小车、乐视RGB-D相机和NVIDIA Jetson Xavier等硬件搭建。移动机器人首先将RGB-D相机采集的彩色图像和深度图像送入深度融合测距模块中,计算粗略的人-机距离;然后通过Sage-Husa自适应滤波算法估计当前时刻的人-机距离,减小测距误差;最后通过PID控制算法驱动移动机器人跟随前人。
移动机器人在室内室外的跟踪结果如图10所示。在室内场景中,移动机器人使用RGB-D相机采集彩色图像和深度图像,并根据深度图像获得行人位置信息,以此调整人-机相对位置。在室外场景中,移动机器人的视野范围更广,但是室外走廊光线条件较为复杂,可以验证其在复杂光照环境的行人跟随能力。移动机器人能够在室内环境稳健地跟踪行人目标,且在光照强度变化剧烈的室外环境中依然具有跟随的鲁棒性。

图10 机器人跟随
4 结束语
本文提出了一种基于MRSD测距的移动机器人跟随系统,主要包含3项工作:①引入Mask R-CNN检测行人目标获取掩膜信息,并根据行人掩膜从深度图像中提取深度信息。②引入S2R-DepthNet网络从RGB图像估计深度信息,融合相机深度图像解决无效深度点的问题,从而准确测量目标行人的距离和偏航角。③基于该距离,建立了基于SHAKF的测距模型,降低量测异常值的影响,同时设计了PID控制器,能够以设定的距离鲁棒跟随前方行人。本文在真实环境中进行了实验,实验结果表明:本文提出的基于MRSD测距的机器人跟随系统能够快速准确检测前人距离并跟随目标人物。
猜你喜欢
导航定位学报(2022年5期)2022-10-13
北京航空航天大学学报(2022年6期)2022-07-02
中国体视学与图像分析(2021年3期)2021-11-24
科学(2020年3期)2020-01-06
制造技术与机床(2017年10期)2017-11-28
制造技术与机床(2017年3期)2017-06-23
电子制作(2017年7期)2017-06-05
科技资讯(2016年21期)2016-05-30
浙江理工大学学报(自然科学版)(2015年5期)2015-03-01
太空探索(2014年1期)2014-07-10
