具有规定性能的多智能体动态事件触发编队控制
2024-03-21 08:15:32张建强杨凯军欧阳凌丛
计算机工程 2024年3期
张建强,杨凯军,欧阳凌丛
(陕西科技大学电气与控制工程学院,陕西 西安 710021)
0 引言
多智能体编队控制问题如今已经得到非常广泛的关注,其目的是制定控制协议,利用相邻智能体之间的信息交换,使得多智能体系统跟踪并保持参考编队队形。目前,多智能体系统编队控制在合作监视[1]、航空航天[2]、自主水下机器人[3]、多机器人[4]等领域已经得到广泛的应用。
为了解决非线性编队跟踪问题,已有多种控制技术应用于多智能体系统,如自适应滑模、神经网络、模糊逻辑系统等。文献[5-6]提出一种基于自适应滑模的编队控制算法,通过设计滑模面来处理系统中存在的非线性项。文献[7-8]提出基于神经网络的自适应控制算法,使用神经网络逼近未知动力学,解决非线性多智能体系统的编队问题。神经网络可以通过学习和调整权重来适应系统的非线性特性和复杂动态,从而提高控制精度,但其计算通常涉及大量的矩阵运算和迭代优化,耗费大量计算时间,导致运算实时性较差。模糊逻辑系统同样可以处理控制系统存在的未知非线性项[9-11],该类方法能以任意精度逼近致密集上的任意光滑函数,但是受到模糊规则的限制,其在控制精度方面不及神经网络。但是在运算实时性方面,模糊控制的基本计算是基于一组预定义的模糊规则,这些规则可以通过简单的模糊逻辑运算进行评估,运算相对较快[12]。因此,本文采用模糊控制来处理多智能体系统中的不确定性问题。
在很多工业系统中,通常要求受控系统能够达到预定的瞬态和稳态性能,且尽量避免由输入饱和所带来的系统控制性能下降问题,因此,在控制器的设计过程中关注规定性能和输入饱和尤为重要。为了便于控制器的设计,通常将具有规定性能的系统从约束形式转化为无约束形式,然后利用新系统设计编队控制律。文献[13-14]分别考虑在匹配和不匹配干扰下具有规定性能的多智能体系统的一致性问题[13]和具有规定性能的时变编队跟踪问题[14],并最终保证了闭环系统在瞬态和稳态下的性能。文献[15-16]研究具有输入饱和的非线性多智能体系统协同控制问题,并在设计过程中引入饱和补偿系统来抵消输入饱和的影响。然而,很少有文献同时考虑到性能约束以及输入饱和问题。
在实际应用场景中,智能体的通信资源往往有限。因此,为了解决控制器信号频发问题,进一步减少网络通信负担,事件触发控制得到极大关注。事件触发机制的原理在于当系统稳定时通过设计事件触发条件,当且仅当此条件被满足时控制信号才会触发更新。文献[17-19]分别针对一阶系统、二阶系统和n阶非严格反馈系统设计事件触发控制策略,大幅降低了控制器信号的更新频率,节约了通信资源。此外,文献[20-21]研究了多智能体系统动态事件触发控制问题,动态事件触发机制存在一个动态变量,相对于固定阈值,动态变量可以自适应地发生变化,从而使得触发阈值不再是一个固定值,更加节省通信资源。因此,在多智能体编队跟踪问题中,考虑动态事件触发机制很有必要。
本文研究具有规定性能和输入饱和的非仿射纯反馈多智能体系统编队跟踪问题,结合模糊逻辑系统,提出一种有限时间动态事件触发编队控制算法。本文的主要工作如下:
1)提出一种基于动态阈值的事件触发机制。与文献[11,15,17]中通过引入事件触发机制来代替连续控制器从而节省通信资源的方案相比,基于动态阈值的事件触发机制由于具备更高的灵活性,因此能更大程度地节省能耗。
2)设计基于有限时间规定性能的输入饱和控制机制。相比于文献[13-14]仅考虑规定性能问题以及文献[15-16]仅考虑输入饱和问题,本文所研究的问题更加接近实际,受控系统在达到预定性能的同时能防止输入饱和所造成的影响。
3)设计多智能体系统模糊控制机制。与文献[7-8]中所采用的神经网络控制相比,模糊控制具有计算量小、便于理解等优点。此外,本文所考虑的系统模型为非仿射非线性纯反馈多智能体系统,由于非仿射非线性项的存在,使得控制策略的设计难度更大。
1 预备知识和问题描述
1.1 图论
本节将通过图论知识来描述智能体之间的通信关系。用无向图G=(v,ε,A)来表示所有智能体之间的通信拓扑,其中,ν为所有顶点的集合,ε为边组成的集合,A为邻接矩阵。通信拓扑图中的顶点代表每个跟随者智能体的位置,边表示智能体之间的信息交换,邻接矩阵A=[aij]∊RN×N,aij表示智能体i与智能体j之间的通信权值,当通信拓扑连接方式为无向图时,aij=aji。如果(i,j)∉ε,那么aij=0,如果(i,j)∊ε,那么aij=1,这里(i,j)∊ε表示智能体j可以传递自身的状态信息给智能体i,则节点i的邻居顶点集合可表示为Ni={j∊ν:(i,j) ∊ε}。此外,定义无向通信拓扑的拉普拉斯矩阵为L=D-A,D=diag(di)∊RN×N称为节点vi的入度矩阵,其中定义领导者与跟随者的连接矩阵为B=diag{b1,b2,…,bn},当跟随者智能体i能够接收到领导者智能体的信息时,bi>0,否则,bi=0。
1.2 系统描述
考虑一类非仿射非线性纯反馈多智能体系统,其中第i个跟随者的动力学模型可以描述为:
其中:uo>0和uω>0分别表 示不对 称输入饱和ui(vi(t))的上界和下界。
此外,领导者的动力学模型可以表示为:
其中:xr(t)表示领导者的状态;fr(xr(t))表示领导者动力学的非线性项;yr(t)表示领导者信号。
本文的控制目标是通过设计控制律,使得非仿射非线性多智能体系统能够在保证规定性能和避免输入饱和的情况下形成预期编队,并保持与领导者行为的一致性。领导者与跟随者智能体满足如下定义。
定义1[13]根据多智能体系统的描述[式(1)和式(3)],如果对于任意的初始值,设计控制协议使得成立,则称其 能够形成预期编队。其中:i=1,2,…,N;ζ1>0和ζ2>0是2 个正常数;Td是与系统初始状态无关的稳定时间;ιi表示编队过程中第i个跟随者与领导者之间的相对位置。
为了实现上述目标,本文进行如下假设:
假设1图G包含一个生成树,其根节点表示领导者智能体,且至少有一个跟随者智能体可以从领导者智能体处接收信息。
假设2[22]领导者信号yr(t)和其导数(t)是有界光滑函数,并且存在2个未知常数Γ0和Γ1,使得
假设3[23]非仿射函数f(∙)连续可微,定义其偏导数为:
对于所有有界偏导数f(∙),存在2 个未知的正常数使得
因此,根据中值定理,有:
1.3 规定性能
本节将为系统建立具有规定性能的控制方案,包括有限时间性能函数和误差转换模型。
1.3.1 性能函数
选择有限时间性能函数为:
其中:ρi和0 <ci<1 是所设计的正常数;0 <Ti<∞是设定系统达到稳定时的时间。值得注意的是,式(6)中定义的性能函数βi(t)在时间Ti处收敛,如图1 所示,图中虚线为规定性能函数。
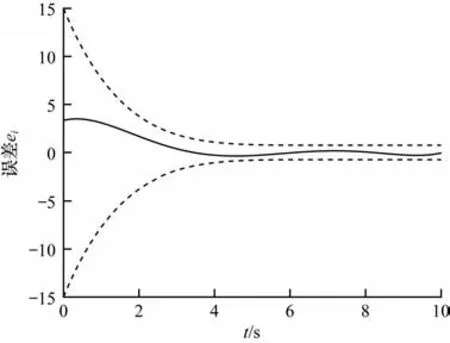
图1 规定性能函数Fig.1 Prescribed performance function
引理1[22]如果在式(6)中构造一个光滑函数βi(t),那么它满足以下性质:
1)如果0 ≤t<Ti,那么βi(t)从ρi严格递减到ρici;如果t≥Ti,那么βi(t)保持常数ρici。
2)对于t∊[0,∞)(t)连续可微,k=1,2,…,m。
3)对于t∊[0,∞),0 ≤-Tici成立。
1.3.2 转换后的编队误差模型
本文的控制目标是设计一种控制方案,使得非线性系统式(1)和式(3)的编队误差严格地在如下的范围内变化:
为了解决带有约束的编队跟踪控制问题,需将编队误差从式(7)中的带约束形式转换为无约束形式。首先定义调制误差(t),并引入误差变换为:
其中:si表示误差映射。
可求得si的导数为:
1.4 动态事件触发机制
为了进一步减少不必要的资源浪费,本文为非线性多智能体系统设计动态事件触发机制,描述如下:
其中:zi(t)=ξi(t)-vi(t)代表测量误差;是一个正常数是动态事件触发机制的更新时间;λi(0)>0和l>0是设计参数。
需要注意的是:
1)本文采用触发信号代替控制器中的连续信号,动态事件触发机制作用于控制器与执行器之间,可以有效减少事件触发的次数,大幅节省资源。对于参数λi(t),从 式(10)中可以 进一步得到λi(t)=λi(t0)exp(-l(t-t0))。设t0=0,λi(0)>0,l>0,则λi(t)>0。λi(t)的这个性质对于后续的证明过程起到至关重要的作用。
2)本文设计动态事件触发机制旨在更大程度地节省控制资源,通过在静态事件触发机制右侧添加一个非负的辅助动态变量λi(t)来扩大阈值函数,如式(10)所示,此动态变量呈现出指数递减的趋势,在开始进行编队时,测量误差较大,所对应的阈值函数也较大,有效避免了事件频繁触发;随着编队的形成,测量误差减小,此时对应的阈值函数也减小,使得控制器信号有效更新,其合理性在式(50)中通过Lyapunov 稳定性方法得到验证。文献[11,15,17]中的事件触发机制可以看作本文方法的一种特殊情况,即当本文事件触发机制中的辅助动态变量为0时,可以近似为上述文献中所提出的方法。因此,相比于其他文献中的静态事件触发机制,本文方法能够进一步降低控制器的触发频率,节省更多资源,更适用于解决通信资源有限的问题。
1.5 模糊逻辑系统
在许多实际的控制系统中经常存在不确定性,这将严重降低系统的性能和稳定性。为了减少不确定非线性项所带来的影响,本文利用模糊逻辑系统来近似处理紧集Ω上的一些未知的连续函数。
模糊逻辑系统通常由4 个部分组成,即模糊器、知识库、模糊推理机和去模糊器。
知识库由一组模糊If-then 规则组成,如下:
Rℓ:IFχ1是,…,χn是,则y是Gℓ,ℓ=1,2,…,L其中:χ=[χ1,χ2,…,χn]T和y分别表示模糊系统的输入与输出;L代表模糊规则的数量为模糊集。通过应用单点模糊化、乘积推理和中心平均去模糊化,模糊逻辑系统可以表示为:
引理2[16]对于定义在紧集Ω上的任意连续函数F(χ),存在模糊逻辑系统式(13)使得:
其中:ϵ是一个任意小的常数。
此外,最优参数Θ*表示为:
其中:Ω1和Ω2分别表示Θ和χ的紧集。则模糊近似误差ϵ为:
引理3[24]对于e∊R和m>0,不等式0 ≤|e| -成立。
2 控制器设计
本文通过反步法设计多智能体系统的虚拟控制器和自适应律。为了实现控制目标,定义一个参数为:
由于系统中存在输入饱和,因此设计如下辅助系统来消除输入饱和所带来的影响:
其中:pi>0 是所设计的一个参数。
图2 所示为本文为第i个跟随者设计控制器的过程,其中包含模糊逻辑系统、输入补偿器、微分跟踪器和事件触发机制,因此,编队跟踪控制器可以在系统中存在输入饱和以及不确定性的情况下实现多智能体系统的预期编队。

图2 跟随者的编队跟踪控制器Fig.2 Formation tracking controller for the follower
定义如下邻域误差以及坐标变换:其中:αi,k-1是虚拟控制信号。
控制器设计步骤如下:
步骤1考虑如下Lyapunov 候选函数:
未知函数Fi,1可利用模糊逻辑系统逼近,其形式为:
其中:χi,1=[xi,1,xj,1]T;ϵi,1>0 是一个常数。由young’s不等式和θi,j的定义,可得:
设计虚拟控制信号和自适应律为:
引入如下的微分跟踪器来解决“计算爆炸”问题:
则虚拟控制信号的导数可估计为:
其中:τi,k和ζi,k是2 个正常数;qi,k是估计误差,且存在正常数,满足|qi,k|≤qˉi,k。
步骤2构造一个正定Lyapunov 函数为:
可求得Vi,2的导数为:
其中:ϕi,2用于跟踪。同样地,根据young’s 不等式可得:
设计虚拟控制信号和自适应律为:
步骤k(3 ≤k≤n-1)选择如下的Lyapunov 候选函数:
步骤n由于存在输入饱和,因此ei,n可进一步表示为:
其中:ηi为抗饱和参数。因此,ei,n导数为:
选择Lyapunov 候选函数为:
可求得Vi,n的导数为:
其中:|m1| ≤1;|m2| ≤1。设计中 间连续 控制信号ξi(t)为:
其中:m3是一个正的常数。
由引理3、式(44)、式(45),可得:
将式(44)~式(48)代入式(42)并根据young’s 不等式,可得:
算法1描述了基于反步法设计的具有规定性能和输入饱和的有限时间动态事件触发编队控制器的伪代码。
算法1有限时间动态事件触发编队控制算法
3 稳定性分析
本节将通过以下定理来证明非仿射非线性多智能体系统的稳定性。
定理1对于满足假设1~假设3 的非仿射多智能体系统式(1),考虑控制律式(47)、参数自适应律式(48)、事件触发机制式(10)和规定性能函数式(6),则可以保证多智能体系统式(1)中所有信号有界,并且编队跟踪误差渐近收敛至0。
证明1考虑一个Lyapunov 候选函数为:
其中:V(0)是有界的是一个未知的有界正常数,因此V(t)是有界的。进而根据式(17)可得:
由式(8)可知,编队误差满足:
此外,为了证明辅助系统参数的有界性,考虑如下Lyapunov 候选函数:
综上所述,可以推导出多智能体系统式(1)中的所有信号都是有界的。此外,由于V(t)及其导数连续有界,根据Barbalat 引理,可得t趋于无穷时V(t)收敛至0,因此,由式(17)、式(28)、式(35)、式(42)及式(54)可得,编队跟踪误差ei渐近收敛至0,并且严格地在预定范围内变化,证毕。
接下来将通过如下定理来证明所设计的动态事件触发机制不会出现Zeno 行为。
定理2对于满足假设1~假设3 的一类非仿射多智能体系统式(1),设计控制律式(47)、参数自适应律式(48)、事件触发机制式(10)和规定性能函数式(6),则可以保证事件触发的时间间隔存在一个下界,即Zeno 行为被排除。
证明2对于动态事件触发机制式(10),由zi(t)=ξi(t)-vi(t)可得:
根据ξi的定义,可以知道是有界的。因此,有这里的是一个正的常数。此外,由于:
根据上述分析,Zeno 行为被成功避免,证毕。
需要注意的是:
1)在控制器设计过程中,首先采用有限时间性能函数,相比于大多数有关规定性能的文献,本文提出的规定性能函数式(6)可以在时间Ti内达到预定值;随后利用模糊逻辑系统处理未知的非线性函数,这能有效放松一些现有文献中对非线性函数的约束,同时,微分跟踪器用于解决“计算爆炸”问题;最后通过Lyapunov 稳定性理论,证明所有智能体之间的编队跟踪误差能够渐近收敛至0。
2)对于编队中可能存在的外部有界扰动问题,将会在控制器设计过程中考虑一个自适应参数[8],这个自适应参数能够根据误差变化进行自适应更新,从而补偿外部扰动的影响。而对于执行器故障问题,拟采用自适应在线更新策略[25]来估计未知的执行器效率因子,通过为每个跟随者设计在线自适应更新律来估计故障因子,从而起到容错的作用。相对于其他经典方法,自适应控制在处理外部扰动方面具有更强的鲁棒性和自适应能力以及不需要准确系统模型等优势。
4 仿真验证
为了验证所提算法的有效性,对包含1 个领导者智能体和5 个跟随者智能体的多智能体系统进行数值仿真,图3 所示为所有智能体之间的网络通信拓扑,其中,0 代表领导者智能体,1~5 代表5 个跟随者智能体。
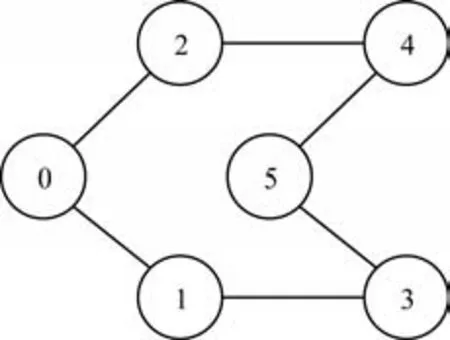
图3 多智能体系统的通信拓扑Fig.3 Communication topology of the multi-agent system
从通信拓扑中可以看到,领导者智能体与任何一个跟随者智能体之间都存在一条有向路径,所以满足假设1。此外,根据图3 可计算其拉普拉斯矩阵为:
领导者与跟随者的连接矩阵为:
第i个跟随者的动力学模型如下:
其中:i=1,…,5。非仿射非线性函数表示如下:
领导者模型表示为:
系统输入饱和的上界和下界分别为uω=-30,uo=30。
所有智能体的初始状态选择为:xr(0)=[0;0],x1,1(0)=[0.6;3],x2,1(0)=[-0.2;4],x3,1(0)=[-1.5;5],x4,1(0)=[-1.5;0.8],x5,1(0)=[-0.2;1.5],xi,2(0)=[0;0],i=1,…,5。
规定性能函数表示为:
控制器的设计参数选择为:ci,1=30,ci,2=40,τi2,ζi=0.8,=0.4,pi=30,δi,1=0.1,δi,2=0.1,ri,1=ri,2==1,λi(0)=0.9,l=1.2=0.12。其中,i=1,…,5。
仿真结果如图4~图12 所示。图4 所示为每个智能体的轨迹和形成过程,从中可以看到,所有跟随者都能保持一定的队形,以相同的速度跟随领导者智能体。图5 和图6 所示分别为编队误差曲线以及规定性能函数(彩色效果见《计算机工程》官网HTML版),从中可以看出,编队跟踪误差能够在有限时间内渐近收敛至0,并且一直保持在预先定义的函数范围内。图7~图11 所示为连续控制器与事件触发控制器的控制曲线,从中可以看到,控制曲线一直维持在-30~30 之间。图12 所示为各智能体的触发时刻,从中可以看出,动态事件触发控制有效地减少了控制器的更新次数。这些仿真结果验证了本文所提算法的有效性。
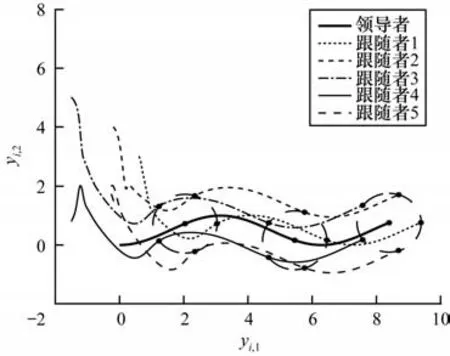
图4 多智能体系统轨迹Fig.4 Multi-agent system trajectories
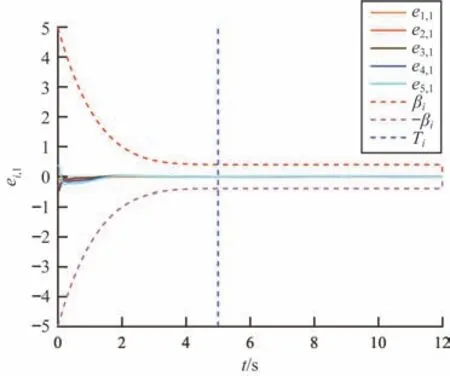
图5 多智能体系统水平方向上的编队跟踪误差Fig.5 Formation tracking error of multi-agent system in horizontal direction
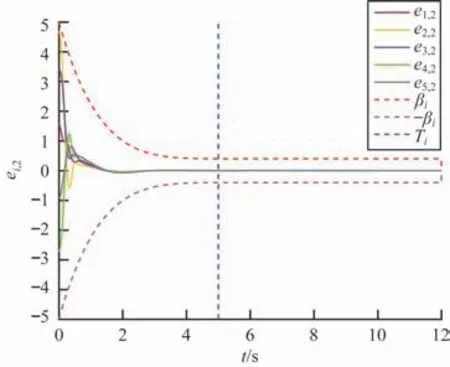
图6 多智能体系统竖直方向上的编队跟踪误差Fig.6 Formation tracking error of multi-agent system in vertical direction
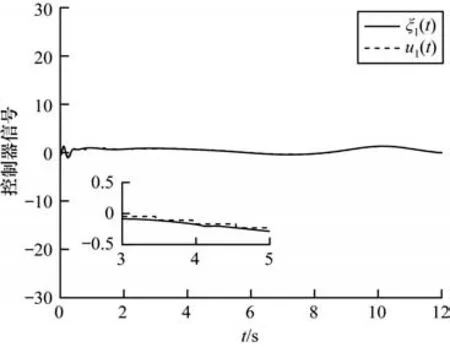
图7 控制器ξ1(t)与事件触发控制器u1(t)Fig.7 Controller ξ1(t) and event-triggered controller u1(t)
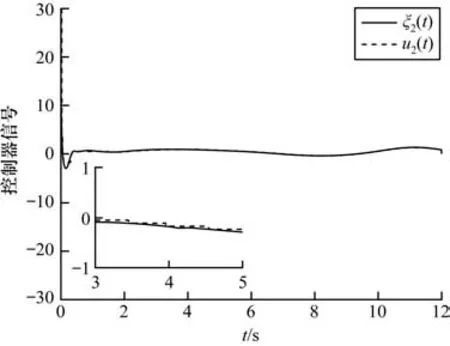
图8 控制器ξ2(t)与事件触发控制器u2(t)Fig.8 Controller ξ2(t) and event-triggered controller u2(t)
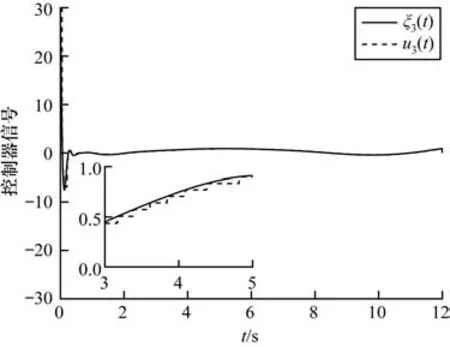
图9 控制器ξ3(t)与事件触发控制器u3(t)Fig.9 Controller ξ3(t) and event-triggered controller u3(t)

图10 控制器ξ4(t)与事件触发控制器u4(t)Fig.10 Controller ξ4(t) and event-triggered controller u4(t)
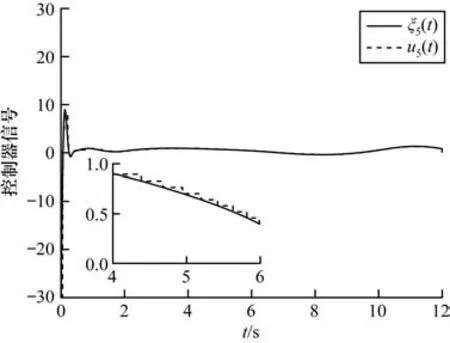
图11 控制器ξ5(t)与事件触发控制器u5(t)Fig.11 Controller ξ5(t) and event-triggered controller u5(t)
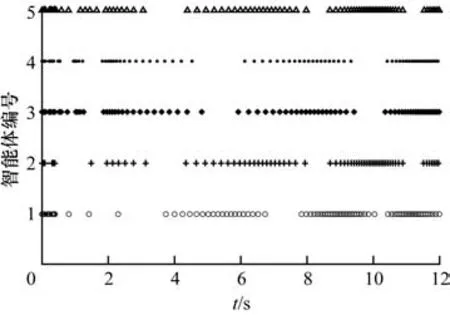
图12 各智能体触发时刻Fig.12 Trigger time of each agent
对于具有输入饱和的多智能体编队控制问题,从控制信号绝对值的积分(IAU)、未饱和区域的控制器曲线峰值和调节时间3 个方面来分析有无规定性能对运算成本的影响,结果如表1 所示。其中:IAU 可以衡量控制信号的能量消耗及幅值特性,IAU值越大,表示控制信号的幅值较大,意味着需要较大的控制力;未饱和区域峰值是指控制器曲线在饱和阈值内的最大值。若考虑规定性能控制,很明显可以看出,控制器所对应的IAU 值以及峰值的数据要小于没有考虑规定性能时的值,并且调节时间也相对较短,这说明本文所考虑的基于有限时间规定性能的输入饱和控制能够节省控制资源,对减少运算成本起到积极作用。此外,由于本文中存在输入饱和,为了处理输入饱和的情况,设计额外算法来补偿饱和效应,这可能会增加运算成本,但是能够有效防止输入饱和所带来的不良影响。
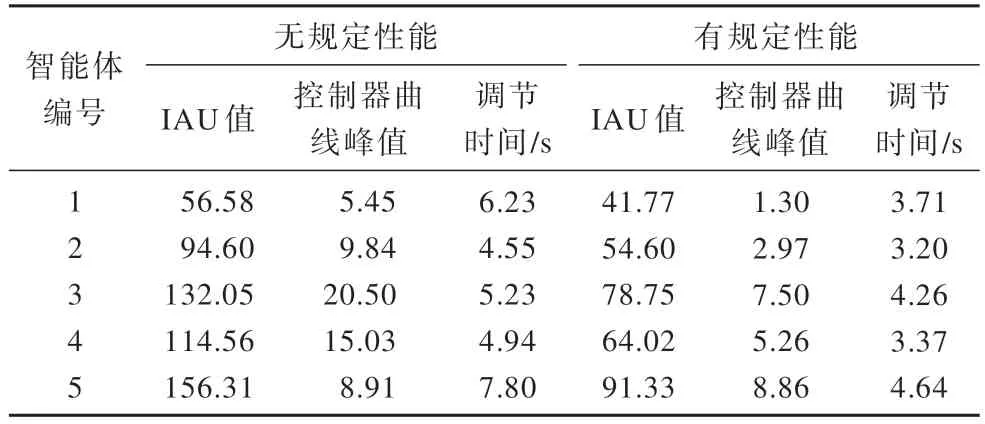
表1 控制器有无规定性能时的对比Table 1 Comparison of controllers with and without prescribed performance
5 结束语
针对具有规定性能和输入饱和的非仿射多智能体系统,本文提出一种有限时间动态事件触发控制算法,以解决多智能体系统编队跟踪问题。采用反步法结合模糊控制以及微分跟踪技术设计有限时间编队控制律,通过设计动态事件触发机制减少控制信号的更新频率,并保证Zeno 行为不会发生。此外,引入动态补偿器来应对输入饱和所带来的影响。利用Lyapunov 稳定性理论证明多智能体编队跟踪误差会渐近收敛至0。仿真结果表明,本文所设计的控制器可以实现编队控制目标,并且能够有效节省通信资源,验证了控制算法的有效性。本文所提控制算法主要解决了系统中的性能约束及输入饱和问题,而在实际中还存在如外部扰动、执行器故障等许多突发情况,下一步将继续完善控制算法,使其能够适应各种突发情况。
猜你喜欢
军事文摘(2023年5期)2023-03-27 08:56:26
卫星应用(2022年7期)2022-09-05 02:36:02
卫星应用(2022年3期)2022-05-23 13:44:30
卫星应用(2022年1期)2022-03-09 06:22:20
环球慈善(2019年6期)2019-09-25 09:06:24
北京航空航天大学学报(2017年3期)2017-11-23 05:14:41
中国广播(2017年9期)2017-09-30 21:05:19
—— 瓮福集团PPA项目成为搅动市场的“鲶鱼”
当代贵州(2017年24期)2017-06-15 17:47:35
诗潮(2017年5期)2017-06-01 11:29:51
中南财经政法大学学报(2015年5期)2015-04-07 03:43:24