
一种建筑施工可伸展平台的设计与应用
2024-03-11 02:32王进进王随玲田春伟毛远平邹开放郝子超
建筑机械化 2024年2期
王进进,王随玲,田春伟,毛远平,邹开放,郝子超,刘 鹏
(1.中国建筑科学研究院有限公司,北京 100013;中国长江电力股份有限公司检修厂,湖北 宜昌 443000)
近年来,随着建筑设计及施工工艺的不断发展,各类异型建筑日益增多,建筑立面形状多样,立面接近维护难度越来越高。作业平台作为建筑立面维护装备的重要组成部分。通过钢丝绳悬挂于空中,四周装有围板或网板,用于搭载操作者、工具和物料的工作装置。通过卷扬机构起升、台车行走、回转等动作可到达不同工作位置。传统作业平台外形尺寸固定,部分异形建筑外立面仅通过台车配合难以覆盖所有工作位置;对部分进口狭窄,内部空腔增大的井道等结构,检修维护无法方便快捷到达作业面,且这些难以接近的特殊位置,对平台通过尺寸有严格限制,需要在到达工作位置后拓展平台作业空间,使施工人员能接近作业面。为解决传统工作平台难以实现工作面全覆盖以及作业位置难以接近的问题,研发一种可伸展平台,操作者在平台内可操作平台实现其在任意作业位置的伸展、伸缩、锁定。
1 可伸展平台结构组成及工作原理
如图1 所示,可伸展平台由伸缩平台、伸展吊架、液压缸、液压包、电控系统、蓄电池、配重等组成。平台通过悬挂钢丝绳与行走台车卷扬机构连接,利用卷扬机构实现平台升降。停机状态时,伸缩平台处于缩回状态,液压缸全部收回,最大化节约停机空间,保证平台通过性。工作时,油缸动作,将伸缩平台顶升至作业位置,后端通过配重块配平,使整机达到稳定状态;伸缩驱动装置使伸缩平台两侧副平台向外延伸,操作者可在副平台作业,从而扩展平台作业空间。
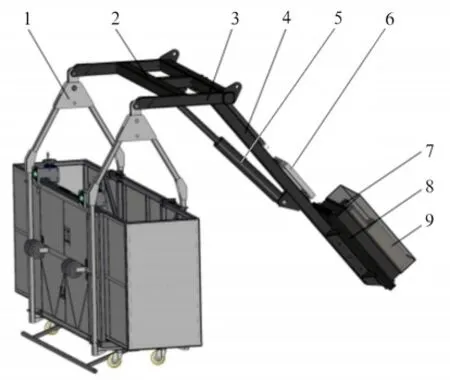
图1 可伸展平台示意图
1.1 伸缩平台
如图2 所示,伸缩平台由主平台、侧伸副平台、伸缩驱动装置、提升架、防撞轮、活动脚轮、下限位装置、滚轮、电控系统、安全保护装置等组成。提升架与伸展吊架用销轴连接。主平台与提升架用螺栓连接,侧伸副平台套接在主平台框架内,通过勾板实现侧向定位,主平台底部滚轮和副平台侧面滚轮在伸缩过程导向作用。主平台上安装齿条,副平台上安装伸缩驱动装置,通过齿轮齿条啮合传动,实现两侧副平台伸缩。
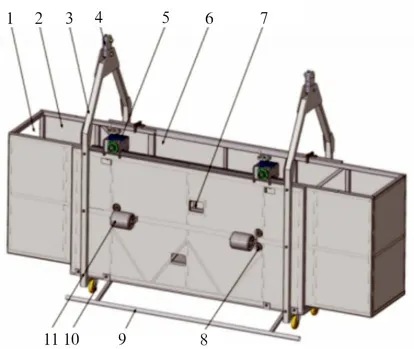
图2 伸缩平台示意图
1.2 伸缩驱动装置
如图3 所示,伸缩驱动装置由手轮、蜗轮蜗杆减速机、齿轮、轴承座、安装架等组成,蜗轮蜗杆减速机输入轴连接手轮,输出轴连接齿轮和轴承座,使用安装支架固定在侧伸副平台上。工作时,操作者转动手轮,通过减速机带动齿轮转动,齿轮与主平台上的齿条啮合传动,带动两侧副平台平稳伸出至所需位置;采用可自锁的蜗轮蜗杆减速机,使副平台到达位置后能平稳制动锁止。
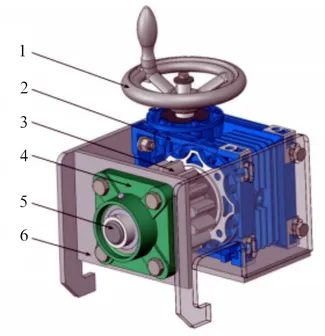
图3 伸缩驱动装置示意图
2 可伸展平台安全保护技术研究
2.1 超载保护装置
伸缩平台顶部设置有拉板式超载保护装置,可精确测量平台载荷,当载荷超过平台额定载重量时,平台停止动作并发出声光报警,只有将超载部分取出才能继续动作,这种超载保护装置安装简便、性能稳定,最大程度保证了平台操作安全性。
2.2 防碰撞预警保护装置
为防止平台与底部视野盲区内的障碍物发生碰撞造成平台倾覆等危险,在平台底部安装有超声波测距仪,当平台与障碍物的距离小于系统设定值时,平台便会提前减速,防止碰撞发生。同时,在平台底部设计有下限位检测装置,如遇障碍物,下限位杆将先于平台与其接触,实现限位制动,防止平台触底。另外,平台工作时靠建筑物侧安装防撞轮,可以起缓冲保护作用,减小损坏建筑物外立面的风险。
2.3 人员防坠落保护装置
传统平台四周为半包围结构,操作者进入平台时,需翻越围挡,存在坠落风险;人员进入平台的过程中,如误触平台开关,极易发生安全事故;作业携带的物料体积或质量过大也不易进入平台内部。为此,在副平台上设计了带有机电联锁的平台门,人员可通过该门直接进入平台内部,避免了翻越围挡带来的风险。当平台门打开时,联锁装置中的电气开关切断平台控制系统,避免平台误动作;只有关闭平台门,锁好门锁时,电气开关自动复位,控制系统才可正常工作。大体积或质量的物料可直接通过平台门进出平台,有效降低作业人员劳动强度。
2.4 监控系统与遥控急停保护装置
可伸展平台亦可用于井道检修等狭窄封闭场景,这些工作情境下,操作者可视范围有限,为保证人员和设备运行安全,在平台内配备有监控系统与遥控急停装置。作业时,平台外1 人携带遥控急停控制装置,随时关注平台工作状态,做好紧急停车准备。
3 可伸展平台设计计算
3.1 主要技术参数
3.2 稳定性校核
考虑最不利工况,验证平台的稳定性,即满载完全伸展工况。
满载完全伸展状态下各部件受力见图4所示。
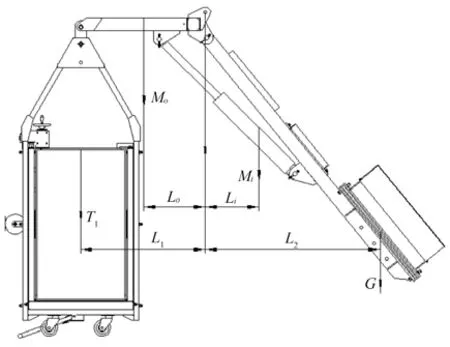
图4 可伸展平台满载完全伸展受力图
图中,T1为平台悬挂载荷,包括自重和额定载荷,L1是伸缩平台重心到机构中心的距离;G为配重重量,L2是配重重心到机构中心的距离;MO为平衡架重量,Lo是平衡架重心到机构中心的距离;Mi为配重架等部件重量,Li是后端部件中心到机构中心的距离。完全伸展状态下,机构中心弯矩M1=T1L1+MOLo-MiLi-GL2=5kgm,可伸展平台整体重心偏移中心距离X1=M1/M总=5/1180=4.2mm,整体重心偏移量很小,满足整机稳定性要求。
3.3 液压系统计算
如图4 所示,液压系统动作后,平台绕铰点旋转展开,伸缩平台完全伸展开时悬挂载荷和平衡架在铰点处产生弯矩为M=T1L1+MOLo=6240Nm。
液压参数:油缸缸径D=80mm,活塞 杆∅56mm,行 程550mm,工作油压P=16MPa,油缸效率η=0.7,油缸到铰点力臂L油缸=0.32m。油缸活塞杆伸出时的推力为F=πD2Pη/4×106=39408N;计算油缸顶升力矩M油缸=FL油缸=12611Nm,M油缸>M,伸展油缸满足使用要求。
油缸两端铰接,安全系数nk=3.5 时,油缸最大允许长度油缸计算长度L=Lk,允许行程S=1/2(L-l1-l2)=795.25mm >550mm,故油缸行程满足要求。
4 结论
本文对一种可伸展平台的设计研究和应用做了系统的阐述,介绍了可伸展平台的结构组成和工作原理,以及安全保护技术。
该研究成果已成功应用于多个异形建筑外立面清洗维护、井道检修维护等项目,经现场验证,使用该装置可极大提高作业效率和操作安全性,促进了行业技术水平的整体提高,对同类型产品的设计研究和应用提供重要的参考价值。
猜你喜欢
装备制造技术(2021年4期)2021-08-05
冶金设备(2020年2期)2020-12-28
无线互联科技(2018年20期)2018-12-27
纤维复合材料(2018年2期)2018-12-07
温州医科大学学报(2016年9期)2016-10-31
现代工业经济和信息化(2016年19期)2016-05-17
设备管理与维修(2016年6期)2016-03-16
哈尔滨医药(2015年4期)2015-12-01
筑路机械与施工机械化(2014年3期)2014-03-01
河南科技(2014年5期)2014-02-27
