叠船运输方式下的半潜船耐波性分析
2024-02-29 06:26:48罗文嘉汤晓勇马艳琳徐嘉爽李志勇
造船技术 2024年1期
王 辉, 罗文嘉, 汤晓勇, 马艳琳, 徐嘉爽, 李志勇
(1.中国石油工程建设有限公司 西南分公司,四川 成都 610095;2.大连中远海运物流供应链有限公司,辽宁 大连 116001)
0 引 言
近年来,随着海上油气资源的开发利用,催生对大型海洋结构物的巨大需求,而这些大型海洋结构物具有超大、超重和形状不规则等特点[1],使其海上安全运输需求不断提高。半潜船是运输大型海洋结构物的特种工程船,通过调整自身压载水改变船舶浮态,使大型结构物可顺利到达半潜船的装货甲板,但由于半潜船装载的结构物体积大、质量大、重心高,因此整船受风面积大,易受风浪影响。若船舶运动幅值过大或加速度过大则导致甲板上的货物绑扎强度不够,稍有不慎可能会造成货物移位甚至倒塌的严重事故,因此,半潜船运输过程中的耐波性研究显得尤为重要。
有关半潜船的耐波性研究主要集中在如下各方面:零航速或非零航速下的半潜船响应幅值算子(Response Amplitude Operator,RAO)曲线;航行工况条件下的半潜船运动幅值和监测点的加速度计算;半潜船参数横摇的影响因素;舭龙骨对半潜船横摇的影响规律等。刘旭等[2]通过耐波性模型试验、实船试验和三维水动力数值模拟方法研究某50 000.00 t半潜船在不同海况条件下的水动力运动响应,获得处于非零航速状态的船体RAO和2个参考点的垂向与横向加速度统计有义值。宋华宁[3]和尹艳等[4]运用SESAM软件对目标半潜船零航速下的运动响应进行短期预报。杨洪所[5]研究不同波高、不同浪向下的半潜船六自由度运动RAO,并计算关注点的加速度。魏枭等[6]利用AQWA软件研究不同水深、不同浪向和不同航速下的纵向多联浮体耐波性。于本福等[7]研究波浪周期和浪向对半潜船运动响应的影响。吴波等[8]和李军等[9]研究半潜船在不同海况条件下的运动响应和加速度规律。李晓君[10]和李晓君等[11]针对装载重大件货物的半潜船在长波海浪中航行时具有发生参数横摇的风险,构建半潜船的运动模型,运用变参数分析法定量计算分析波浪长度、波浪高度、初稳心高和航速变化等关键因素对半潜船航行安全的影响程度和作用规律,找出诱发半潜船参数横摇的关键因素。蔡连财等[12]研究舭龙骨参数对半潜船横摇响应的影响。
综上所述,半潜船由于运输货物的特殊性和运输时间长、风浪环境多变,因此在每次运输前均需要根据所载货物和途经航线等进行具体的耐波性计算分析。叠船运输方式,即半潜船甲板承载双驳船浮托的井口平台,具有更大的挑战性与危险性。以叠船运输方式下的半潜船为研究对象,采用AQWA软件,基于势流理论,对该船在不同航速、不同吃水和不同海况条件下的运动响应规律进行研究,并计算相关参考点运动幅值和加速度,为半潜船货物的安全绑扎提供设计依据。
1 理论基础
1.1 叠船运输方式下的半潜船运动响应
假定叠船运输方式下的半潜船在一定航速下的流场为无黏性、无旋转和不可压缩的理想流体,则流场的运动可采用三维势流理论描述,浮体结构在波浪中的波浪激振力Fwj由入射波和绕射波引起,其表达式[6]为
Fwj=Fwj,k+Fwj,d=Re[(fwj,k+fwj,d)]e-iwt
(1)
式中:j为第j阶运动模态,在j=1,2,…,6时Fwj分别为纵荡力、横荡力、垂荡力、横摇力矩、纵摇力矩和艏摇力矩;Fwj,k和fwj,k为第j个自由度的弗劳德·克雷洛夫力;Fwj,d和fwj,d为第j个自由度的绕射力;Re[]为取[]内复数变量的实部。
(2)
式中:ρ为浮体所处流场中的流体密度;S为浮体结构表面面积:S0为浮体结构在水中的湿表面面积;φI为入射波速度势;φD为绕射速度势;nj为浮体各自由度的法向量;U为航速。
由辐射势引起的辐射力Fj的表达式为
(3)

uj,l和λj,l的表达式为
(4)
式中:φr为物体激荡的辐射势。
浮体的频域运动方程为
(5)
式中:m为浮体的质量矩阵;u为以uj,l为元素的附加质量矩阵;λ为以λj,l为元素的附加阻尼矩阵;k为静水恢复力矩阵;x为浮体的运动响应幅值算子列阵;Fw为浮体所受的以Fj为元素的波浪激振力列阵。
求得式(4)的附加质量与附加阻尼和式(1)的波浪激振力,代入式(5),即可求得叠船运输方式下的半潜船运动响应。
1.2 叠船运输方式下的半潜船短期最大值预报
对于一个给定的波浪谱S(ω),叠船运输方式下的半潜船水动力载荷的波频运动响应谱SR(ω)的表达式[13]为
SR(w)=RAO2S(w)
(6)
根据响应谱得到的第n阶矩的表达式为

(7)
式中:mnR为运动方差。
一般认为短期海况符合窄带瑞利分布,浮体的波频运动近似认为同样符合瑞利分布。对于短期海况时间t,浮体波频运动次数为t/T1R次,出现的最大值所对应的超越概率为发生次数的倒数T1R/t,则浮体运动最大值Rmax为
(8)
1.3 叠船运输方式下的半潜船加速度预报
叠船运输方式下的半潜船货物绑扎设计监测点的三向加速度表达式[9]如下:
纵向加速度为
alongi=xG-(yP-yG)ψ+(zP-zG)θ-gsinθ
(9)
横向加速度为
atrans=(xP-xG)ψ+yG-(zP-zG)φ-gsinθ
(10)
垂向加速度为
avert=-(xP-xG)θ+(yP-yG)φ+z
(11)
式(9)~式(11)中:z、φ、θ和ψ分别为垂荡、横摇、纵摇和艏摇的幅值;xG、yG和zG分别为叠船运输方式下的半潜船重心G的纵向、横向和垂向坐标;xP、yP和zP分别为货物绑扎设计监测点P的纵向、横向和垂向坐标;g为重力加速度。
2 AQWA软件可靠性验证
为保证AQWA计算耐波性结果的可靠性,采用具有公开试验数据结果的DTMB5512标准模型[14]进行耐波性计算,包括纵摇运动和垂荡运动,计算工况为规则波中零航速下的迎浪状态。DTMB5512标准模型主尺度如表1所示。采用CATIA软件建立DTMB5512的三维模型,如图1所示。将三维模型导入AQWA,设置浮体质量、阻尼和水动力计算参数并进行网格划分,对三维模型进行水动力计算,计算结果如图2所示。由图2可知:AQWA计算值与试验值曲线的趋势基本一致且相对误差较小,验证AQWA软件计算耐波性的可靠性和有效性。
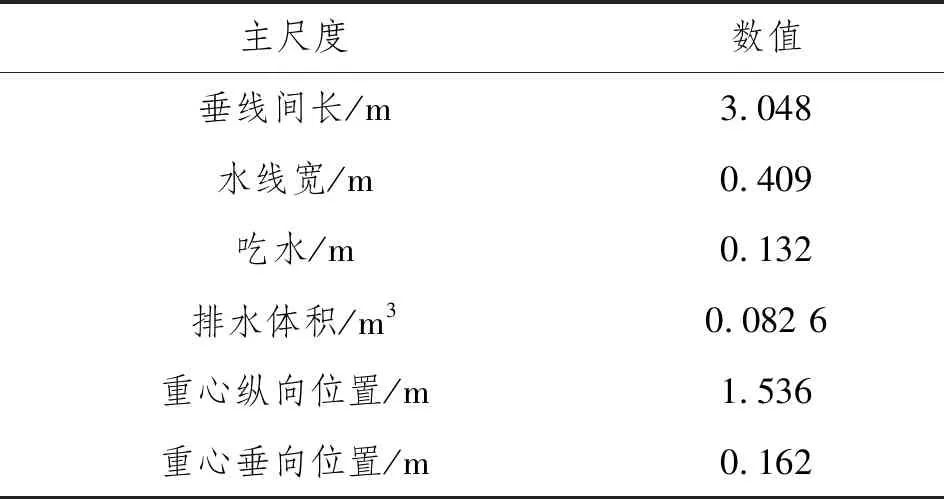
表1 DTMB5512标准模型主尺度
图1 基于CATIA的DTMB5512三维模型
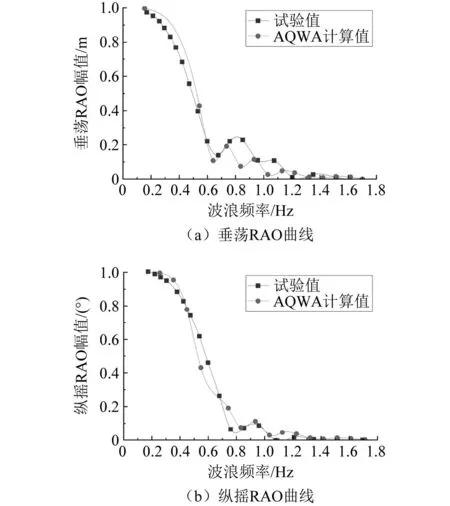
图2 DTMB5512三维模型水动力计算结果
3 计算模型和载况
叠船运输方式下的半潜船具体载况如下:2艘驳船(自艉部开始,分别为驳船1与驳船2)浮托1个井口平台(坐落于双驳船上)组成联合体,该联合体叠放在半潜船甲板上。叠船运输方式下的半潜船三维模型如图3所示。AQWA系统计算的坐标系如图4所示,其中,坐标原点位于船舶中纵剖面与水线面交线和艉垂线的交点处,自原点指向艏部为x轴正向,左舷为y轴正向,水面垂直向上为z轴正向。
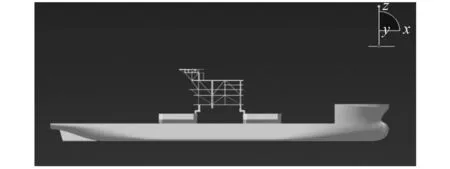
图3 叠船运输方式下的半潜船三维模型
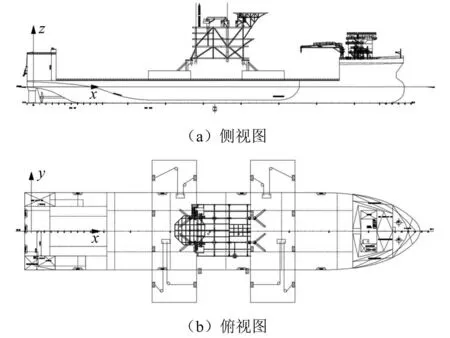
图4 坐标系定义
半潜船主尺度如表2所示。该船与装载货物(2艘驳船和1个井口平台)的质量重心和惯性半径如表3所示,其中,Rxx、Ryy和Rzz分别为对应各坐标轴的惯性半径。由于该船的最大载重量为60 000.00 t,而装载货物总质量约19 300.00 t,因此在搭载货物后该船的吃水仍具有较大裕量。为研究吃水对耐波性的影响,设计3种吃水工况,分别为9.600 m、8.600 m和7.600 m,通过COMPASS软件对该船进行配载,得到3种吃水对应的排水量和重心位置,如表4所示。将半潜船CATIA三维模型导入AQWA,根据表3和表4的数据进行系统参数设置和网格划分,即可进行系统的水动力求解,其中,网格最大单元尺寸为5.000 m×5.000 m,单元总数为4 966个。
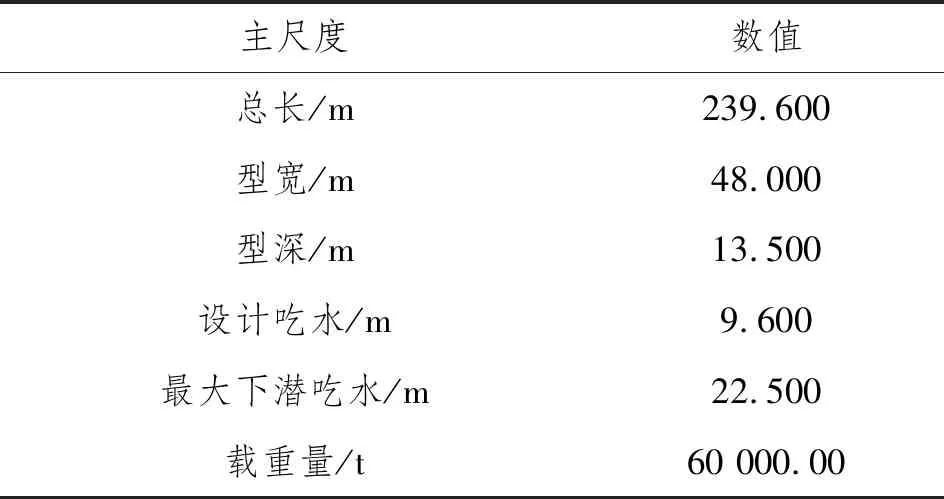
表2 半潜船主尺度

表3 半潜船与装载货物的质量重心和惯性半径
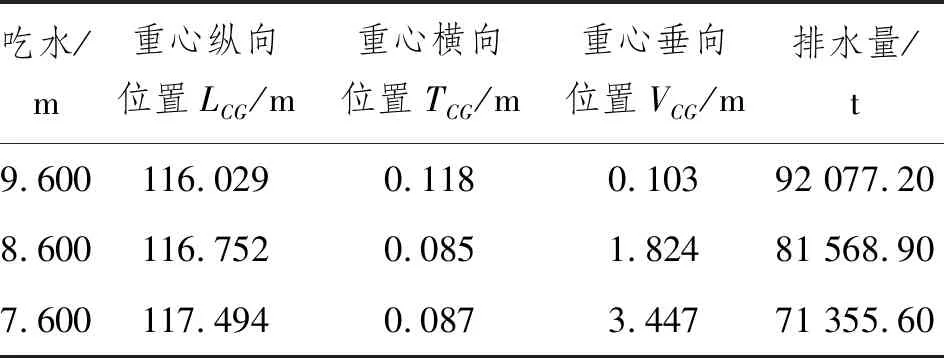
表4 半潜船装载工况
4 叠船运输方式下的半潜船运动响应
4.1 叠船运输方式下的半潜船RAO
RAO等于浮体六自由度运动幅值与输入波幅比值的平方,表示在线性波浪作用下浮体的运动响应特征。计算在满载吃水9.600 m时浪向和航速对叠船运输方式下的半潜船RAO的影响,找出最危险浪向,在此基础上研究不同吃水的影响。RAO计算工况如表5所示。
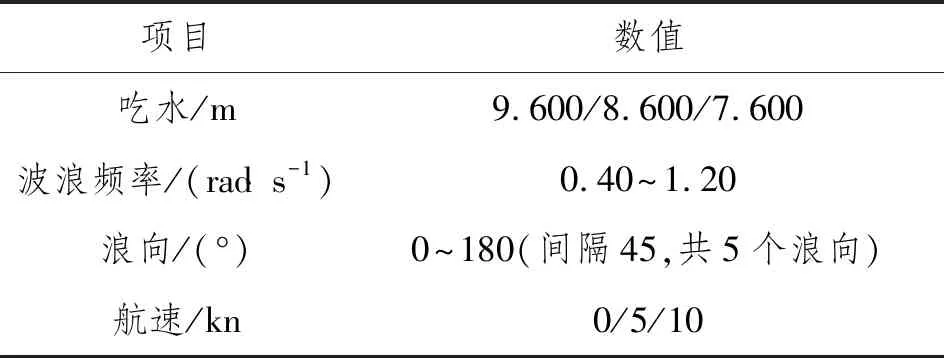
表5 RAO计算工况
4.1.1 浪向和航速对RAO的影响
在满载吃水9.600 m时,计算3个航速下的六自由度RAO,如图5所示。

图5 不同航速下的六自由度RAO与浪向的关系
六自由度RAO的最危险情况如表6所示,其中,横摇最大达5.838°,纵摇最大达0.804°,垂荡最大达1.159 m。最危险浪向下的不同航速对RAO的影响如图6所示。
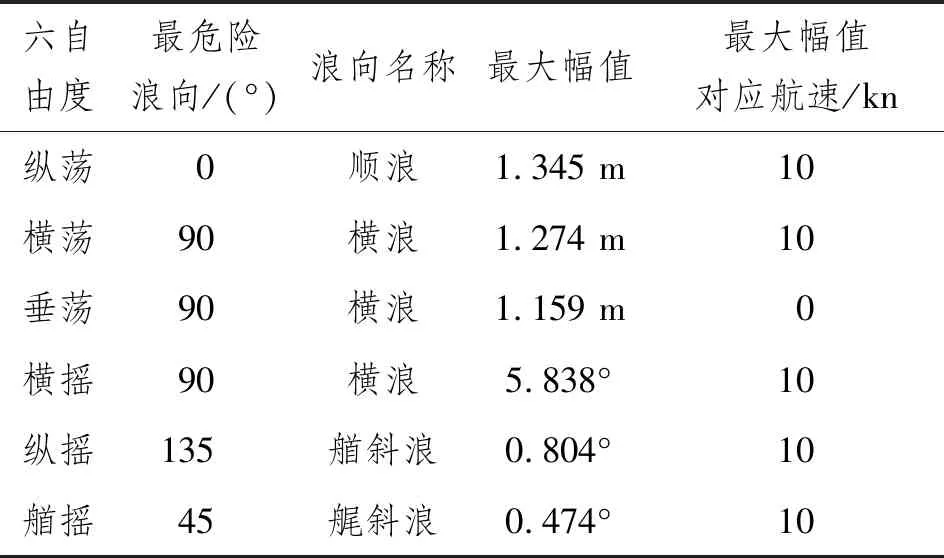
表6 RAO最危险情况

图6 最危险浪向下的不同航速对RAO的影响
由于横摇、垂荡和纵摇对叠船运输方式下的半潜船影响更大,因此重点分析这3个自由度在最危险浪向下和不同航速下的RAO幅值变化规律。
(1)横摇:横摇RAO幅值最明显,基本不随航速变化,这与浪向为90°时波浪频率等于自然频率、波浪频率不随航速变化的规律一致。
(2)垂荡:在角速度ω<0.70 rad/s即周期T>8.95 s时,航速增大,垂荡RAO幅值随之有所减小,其他频段垂荡RAO幅值不随航速变化。
(3)纵摇:角速度ω<0.60 rad/s即周期T>10.50 s时,航速增大,纵摇RAO幅值随之有所增大,其他频段随航速增大,纵摇RAO幅值减小。
4.1.2 吃水对RAO的影响
根据表6,计算在最危险浪向下和最大幅值对应航速下不同吃水工况(分别为9.600 m/8.600 m/7.600 m)的RAO幅值变化规律,如图7所示。
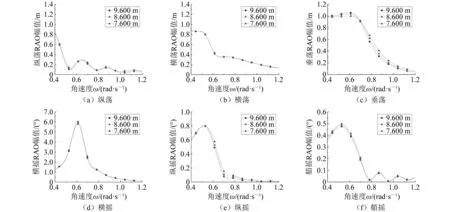
图7 最危险浪向和最大幅值对应航速下的不同吃水工况对RAO的影响
(1)横摇:横摇RAO幅值变化最大,在角速度ω=0.62 rad/s(即周期T=10.13 s)时达最大值,且吃水增大,横摇RAO幅值减小;其他频段横摇RAO幅值对吃水变化不敏感。
(2)垂荡:在角速度ω<0.70 rad/s(即周期T>8.95 s)时,吃水增大,垂荡RAO幅值随之增大;在角速度ω>0.70 rad/s时,吃水增大,垂荡RAO幅值减小。
(3)纵摇:在角速度ω>0.50 rad/s(即周期T<12.56 s)时,吃水增大,纵摇RAO幅值减小;在角速度ω<0.50 rad/s时,纵摇RAO幅值不随吃水变化。
4.2 叠船运输方式下的半潜船在不规则波中的短期预报
4.2.1 航线环境条件与计算工况
运输航线为自中国某港口至中东某港口,根据航线与全球航区划分,途经28、41、40、62、61、60、50、39和38航区。根据GWS全球海洋波浪统计数据库,各航区10 a最大有义波高如表7所示。
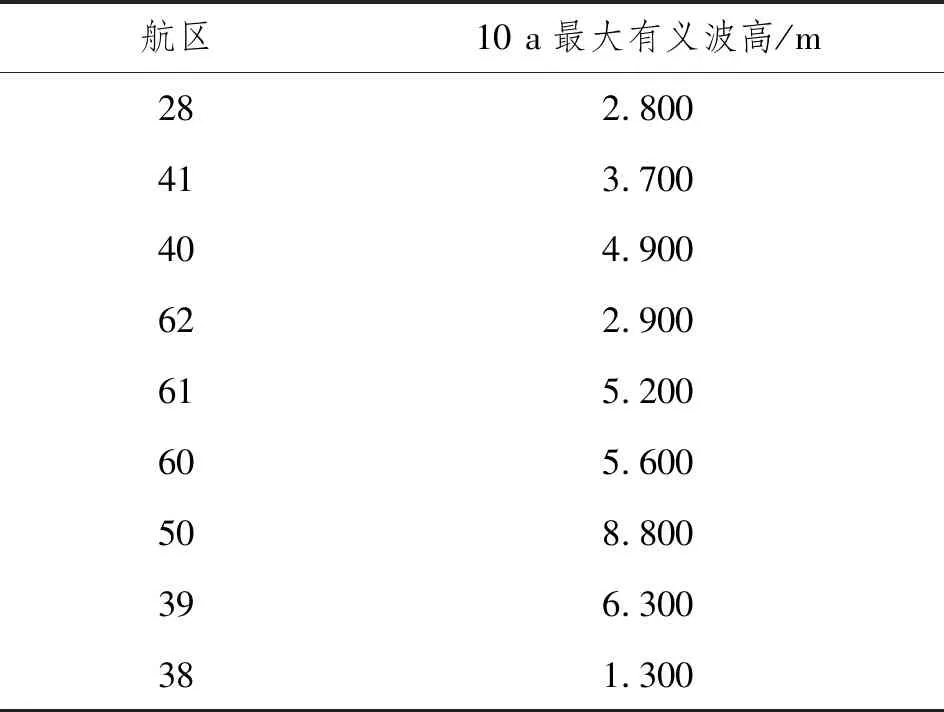
表7 各航区10 a最大有义波高
根据上述资料,该航线10 a最大有义波高为8.800 m,设置3个不同海况,即3个不同的有义波高(Hs),计算工况如表8所示。计算货物绑扎设计关键点的加速度,监测点位置分别为双驳船的重心处和井口平台重心处,具体数值如表3所示。
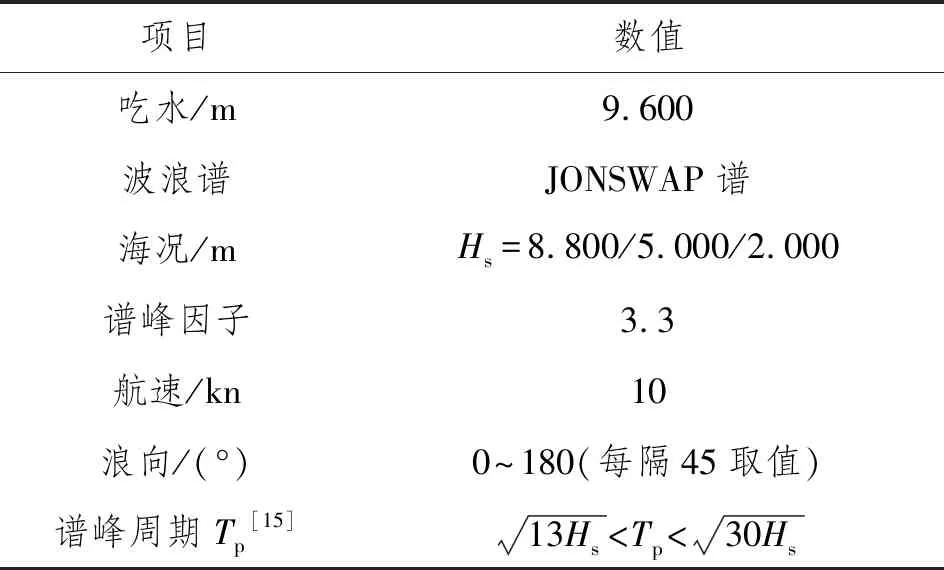
表8 计算工况
根据文献[15],对于带有冗余推进系统的自航式半潜船,对不同浪向下的有义波高进行折减,如表9所示。不同有义波高下的环境组合工况如表10所示。
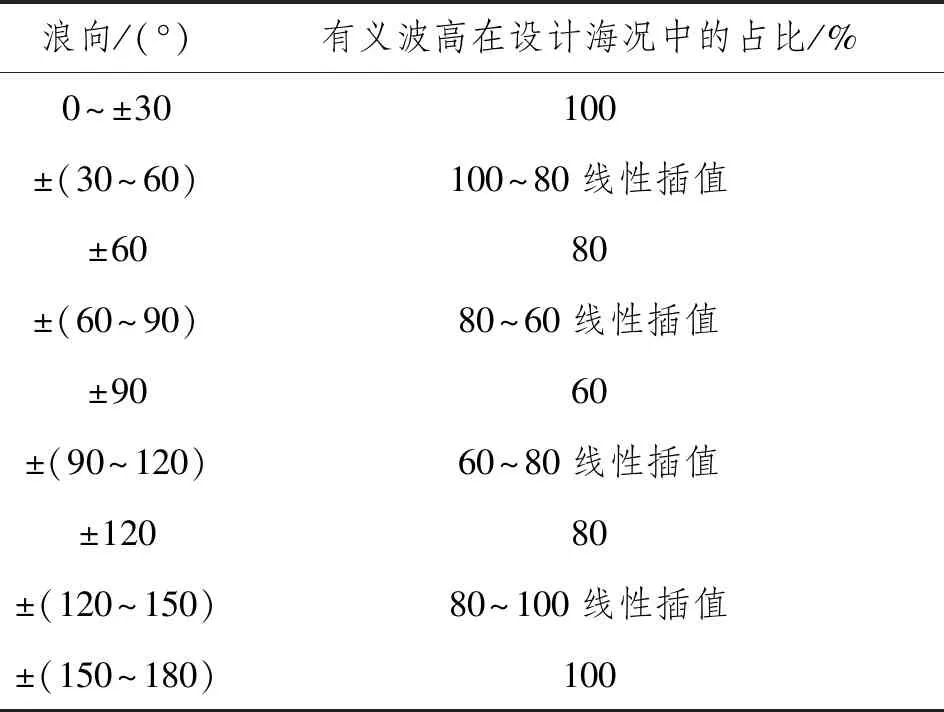
表9 波高折减表
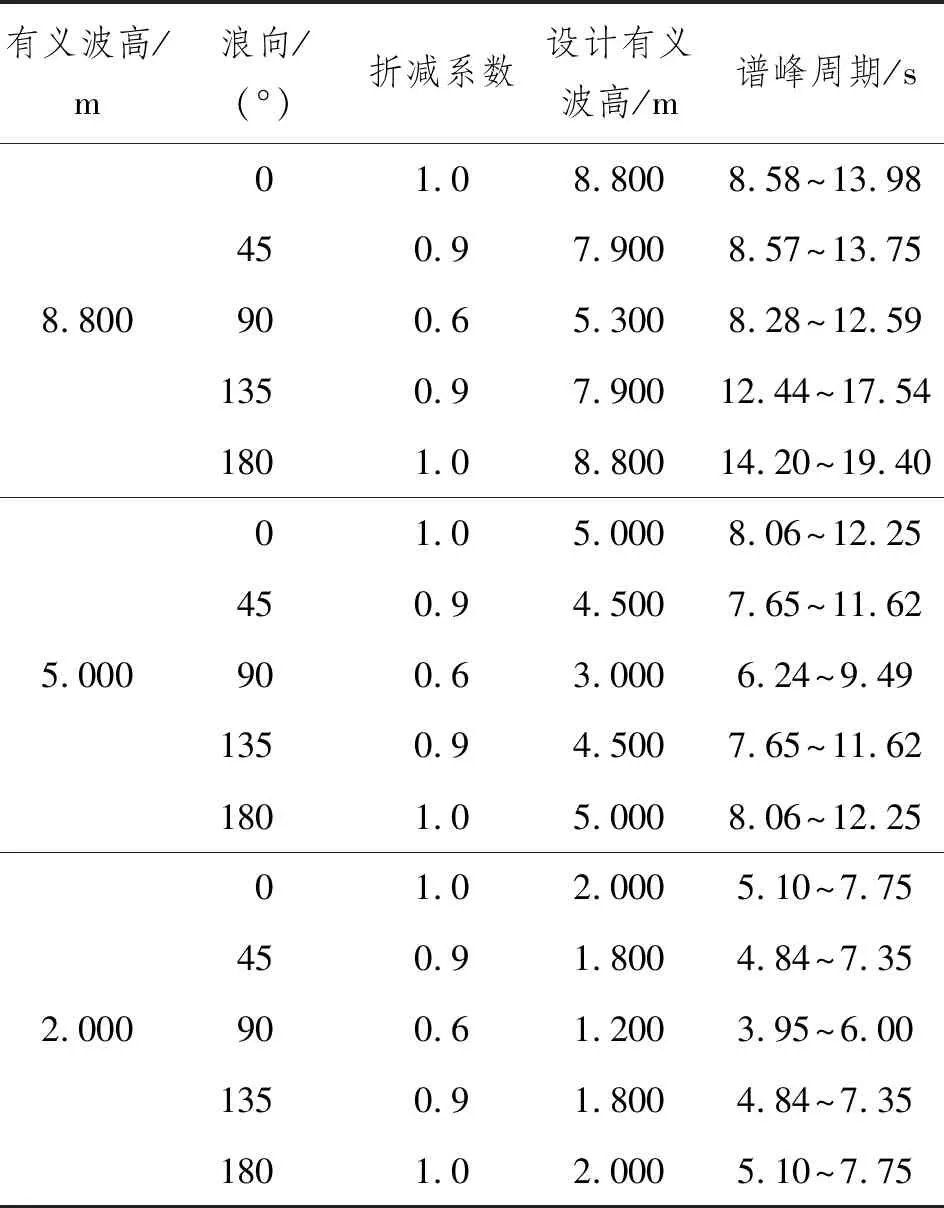
表10 环境组合工况
4.2.2 在不规则波中的运动响应
根据表10的环境组合工况进行计算,得到重心处六自由度运动响应最大值,如表11所示。随着有义波高增大,横摇运动幅值变化最大,每增大单位有义波高,横摇角平均增大2.88°;其次是垂荡运动,每增大单位有义波高,垂荡幅值平均增大0.850 m;最后是纵摇运动,每增大单位有义波高,纵摇角平均增大0.79°。
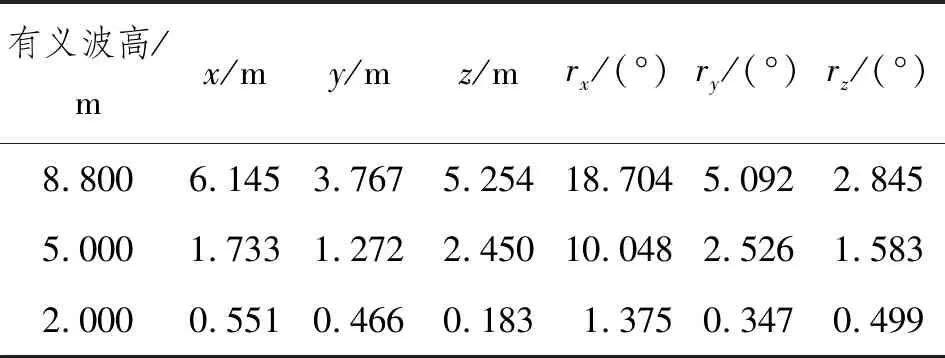
表11 不同有义波高下的重心处六自由度运动响应最大值
货物绑扎设计监测点在上述海况条件下的横向、纵向和垂向加速度,如表12和图8所示。由图8可知:对于半潜船和2艘驳船,垂向加速度随有义波高变化最敏感,纵向加速度变化幅度最小;井口平台重心较高,变化最大的是横向加速度。一般在干拖运输航行过程中,对船舶横向加速度比较关注。海洋工程要求干拖运输在较大波浪条件下的最大横向加速度为0.5g[8]。叠船运输方式下的半潜船在不同海况的计算结果中,货物绑扎设计监测点横向加速度的最大值为3.638 m/s2,小于0.5g,符合要求。
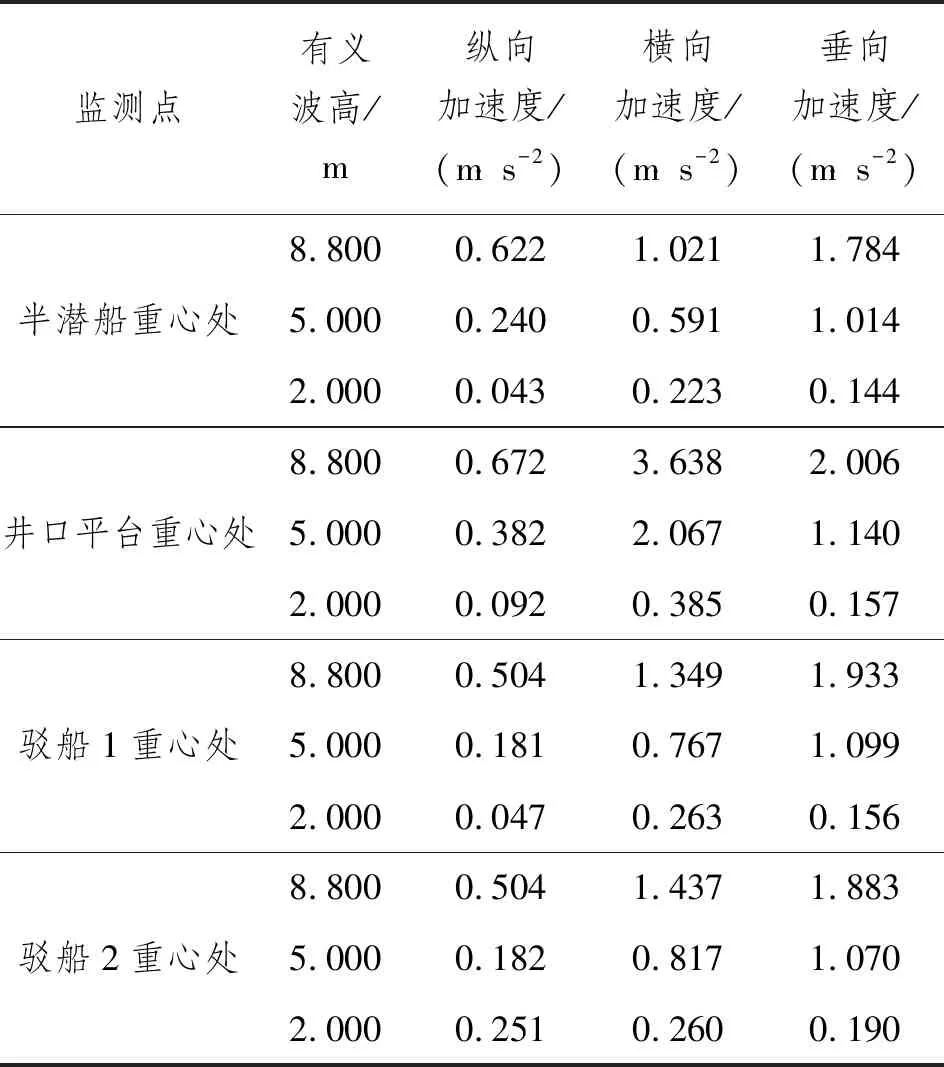
表12 货物绑扎设计监测点的加速度
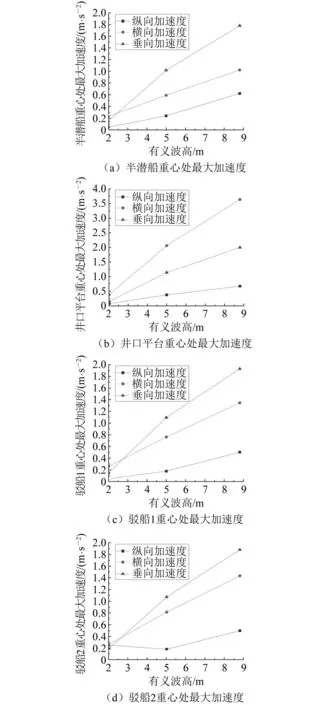
图8 货物绑扎设计监测点的最大加速度
5 结 语
对叠船运输方式下的半潜船进行水动力分析,分别计算重心处的RAO幅值和不规则波中的运动幅值与加速度。为减小RAO幅值,可适当增大航速、增大吃水,浪向保持纵浪和45°或135°的斜浪比较有利。对不规则波中的运动和货物绑扎设计监测点的加速度进行短期预报,可为叠船运输方式下的半潜船货物绑扎提供设计依据。
猜你喜欢
人民长江(2023年6期)2023-07-25 12:24:14
舰船科学技术(2022年22期)2022-12-13 03:37:24
舰船科学技术(2022年21期)2022-12-12 08:06:02
水上消防(2022年1期)2022-06-16 08:06:56
地质装备(2021年2期)2021-04-23 07:33:52
舰船科学技术(2021年12期)2021-03-29 01:28:12
设备管理与维修(2018年23期)2018-12-20 09:22:46
水利与建筑工程学报(2018年4期)2018-08-21 07:47:54
舰船科学技术(2018年7期)2018-07-25 06:30:18
世界海运(2017年9期)2017-12-15 08:58:01