
物探船硬浮体阵列自扩变量分析与应用
2021-04-23 07:33:52蒋先锋
地质装备 2021年2期
蒋先锋
(中石化海洋石油工程有限公司上海物探分公司,上海 200120)
1 硬浮体结构
图1所示的硬浮体由挪威BARO公司生产制造,直径800 mm,长20 079 mm,浮力95.795 kN,黑色部分是硬浮体主体,材质PEH工程塑料。硬浮体下方是分水板,材质双向不锈钢。

图1 BARO硬浮体
分水板的作用:一是内部采用特殊设计,达到足够强度,以实现硬浮体对枪阵的挂载、沉放、释放及回收;二是可通过牵引的角度变化,改变水流对分水板的作用力,使浮体产生位移,实现枪阵的自扩功能,使枪阵能在船舶的拖带下,达到指定的扩展位置,满足震源阵列的排布。在海洋石油勘探作业中,借助物探船强大的拖带能力,硬浮体阵列凭借自身独特的自扩特性,使其能最大限度满足海洋物探对震源扩展的要求,并减少扩展阵列所需的专用设备,因此被广泛应用于大中型物探船。
2 硬浮体动态平衡的力学分析
物探船通过柔性炮缆牵引震源浮体,挂载枪阵进行扩展。如图2所示,硬浮体枪阵在物探船的拖带牵引下,受到三个力作用,一是物探船通过炮缆作用在浮体上的牵引力Fa,二是硬浮体受到的正面流体阻力Fb,三是海水作用在浮体分水板上的横向扩展力Fk。
设定浮体和船向夹角为α,炮缆和船向夹角为β,船速为va(对地速度),海水的流速vb(对地速度),浮体和流体之间的相对速度是Δv,顶流时Δv=va+vb,顺流时Δv=va-vb。
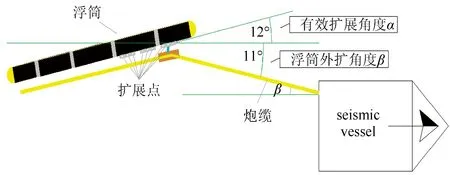
图2 物探船拖带单排硬浮体图
2.1 以处于动态平衡时的浮体及分水板为研究对象
建立基本力学模型如图3。

图3 动态平衡状态的浮体受力分析
浮体处于动态平衡时,物探船将以匀速直线航行,此时浮体受力平衡状态,即

(1)
根据流体力学原理,运动物体在流体介质中受到的阻力是
F=0.5Cρv2S
(2)
式中:C为流体的阻尼系数;ρ为流体密度;v为流体和浮体之间的相对速度;S为物体相对流体的正面投影面积。
设定海水阻尼系数为C,海水密度是ρ,浮体和海水之间相对速度是Δv,浮体分水板面积S,则
Fb=0.5CρΔv2Ssinα
(3)
式中:α为浮体分水板和船向夹角。根据勾股定理,浮体的横向扩展力为
Fk=Fbtanβ=0.5CρΔv2Ssinαtanβ
(4)
Fb=Facosβ=0.5CρΔv2Ssinα
(5)
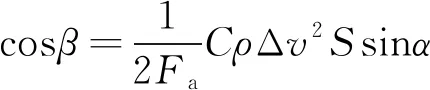
由公式(4)推导出:
Facosβ=0.5CρΔv2Ssinα
(6)
(7)
2.2 以炮缆为研究对象
炮缆受到两个力,一是来自于浮体的相互拖拽力Fa,二是来自物探船的拖带力Fs,见图4。
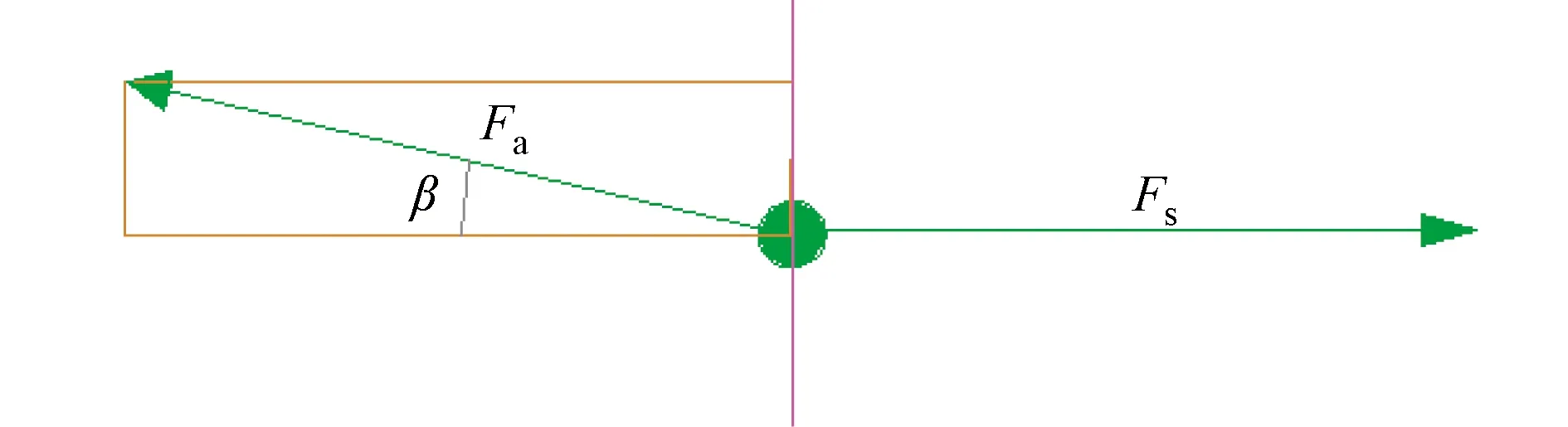
图4 炮缆受力平衡状态时的受力
炮缆动态平衡状态时在水平方向的受力必然平衡,则Fs=Facosβ,Fa=Fs/cosβ。
3 硬浮体起始状态到动态平衡过程的力学分析
假设物探船:①处于起始状态;②物探船能提供稳定的动力输出;③物探船拖带三排独立的硬浮体枪阵,从右往左编号依次4、5、6,处于起始状态的三排阵列扩展角度β,此时β相等,β=β1=β2=β3;以浮体为研究对象。
3.1 α变化对Fk、β、Fa、Fb影响分析
根据公式(2),每排枪阵受到横向扩展力分别为:
Fk1=Fbtanβ=0.5CρΔv2Ssinα1tanβ1
(8)
Fk2=Fbtanβ=0.5CρΔv2Ssinα2tanβ2
(9)
Fk3=Fbtanβ=0.5CρΔv2Ssinα3tanβ3
(10)
同艘物探船,在起始状态,处于同等水文条件时,参数C、ρ、 Δv2、S数值相同,每排枪阵横向扩展力Fk伴随浮体有效扩展角度α变化而变化。α角度范围是0~π/2,横向扩展力Fk在0~π/2范围内随着α变大而变大。在Fk作用下,浮体会横向扩展,角度β会随着浮体的扩展而变大,Fk越大,浮体的横向位移越大,即β越大。依据F=ma和r=0.5at2+v0t+r0可知,相同质量的浮体,Fk越大,获得的横向初始加速度a越大,浮体获得初始横向扩展动能越大,相同时间的横向位移r越大。由此得知:α越大,浮体的横向扩展力Fk越大,β越大。
当浮体向外扩展,在炮缆牵引力、浮体扩展力及流体阻力作用下达到受力平衡时,浮体在最大横向位移r处,依据公式(6)推出:
(11)
α、β定义域(0,π/2),得出结论:α越大,枪阵来自于炮缆(船舶)的牵引力Fa越大;或者,船舶动力输出在不同扩展角度α的浮体上是不同的,α越大,船舶动力输出在该浮体上越大。依据公式(5)分析浮体受到的阻力Fb可知:α变大,浮体受到流体阻力Fb变大。
3.2 Δv变化对Fk、β、Fa、Fb影响分析
依据公式(5)可知,浮体和流体之间相对速度Δv变大,流体阻力Fb变大,反之亦然。顶流时, Δv=va+vb变大,浮体受的流体阻力Fb变大;顺流时, Δv=va-vb变小,浮体受的流体阻力Fb变小。
根据 MIO公式(4)可知:Δv变大,Fk变大,β变大。顶流时浮体横向扩展力Fk变大,β变大;顺流时浮体横向扩展力Fk减小,β变小。
根据公式(5)可知:当Δv变大时,β变大,那么来自于炮缆的拖带力Fa变大。
3.3 Fa变化对Fk、β、Fb影响分析
依据公式(5),物探船处于稳定状态时α是定量,故1/2CρΔv2Ssinα是常量。因此,加大船舶拖带力,Fa要变大,维持等式成立条件是cosβ变小,所以β要变大,而在(0, π/2)定义域内β越大,cosβ越小。因此,加大船舶拖带力,β变大,浮体阻力Fb变大,浮体横向扩展力Fk变大。
3.4 硬浮体自扩展能力上限分析
根据公式(11)可知,浮体、分水板的连接方式决定角度α大小,一旦连接方式确定,α确定,即sinα是固定值,上述等式中只有Fa和β是变量。
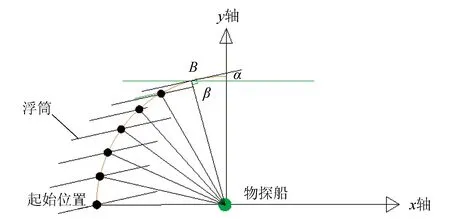
图5 浮体扩展轨迹图
4 自扩式硬浮体设计与应用
4.1 自扩式硬浮体阵列拖带方式设计
用浮体动态平衡时的β验证浮体自扩展能力,基于上述分析可知影响浮体扩力关键因素是:①浮体有效扩展角度α,②船和流体之间的相对速度Δv,③船舶的拖动力Fs,④浮体分水板的面积S。
要实现稳定合理的阵列布局,浮体首先在平面位置分布对扩力进行梯化设置,避免出现同等扩力浮体之间交叉缠绕故障发生,使阵列释放、回收、扩展成为可能;其次,物探船必须有足够动力输出;水下环境错综复杂,流体和船舶之间的相对速度是影响浮体扩力的重要因素,必须要审慎考虑;不同扩力的浮体间要有合理的互相制约机制,使阵列间距稳定可控。
基于上述分析可知:α越大,浮体的横向扩展力Fk越大,β越大(图6),扩展状态下的阵列,双震源对称分布,浮体1、6的α相等并最大,2、5相等次之,3、4靠内侧相等且最小。此设计实现了浮体扩力阶梯化分布,通过阵列的合理布局,理论上避免了枪阵之间交叉缠绕。
同时,α越大,枪阵来自于炮缆(船舶)的牵引力Fa越大。不同α的浮体,船舶拖带力不同,船舶需足够动力输出,才能保证阵列稳定扩展。
在错综复杂的水文环境下,要实现稳定可控的浮体间距,浮体本身有扩力是不够的,浮体间相互制约的合理机制是必须的。图6中显示了4种阵列约束方法,炮缆上安装滑套,滑套间连接间距绳,不同扩力的阵列在同一约束机制下,形成稳定可控的震源间距。

图6 硬浮体阵列的自扩展图
4.2 自扩式硬浮体阵列的操作
第一种方法是通过调节炮缆和分水板之间的连接位置,改变有效扩展角度α(图7)。

图7 分水板扩展点位分布
BARO公司设计的硬浮体,靠近头部区域设置三个扩展区,扩展区之间直线距离2 m左右,每个扩展区有三个可选择的安装点位,安装点位越靠近浮体头部位置α角度越小。单个扩展区上的三个点位用来微调α,靠前变小,靠后变大。图8中炮缆、分水板不同连接位置,对应不同α和β角度,连接位置越靠后,α越大。
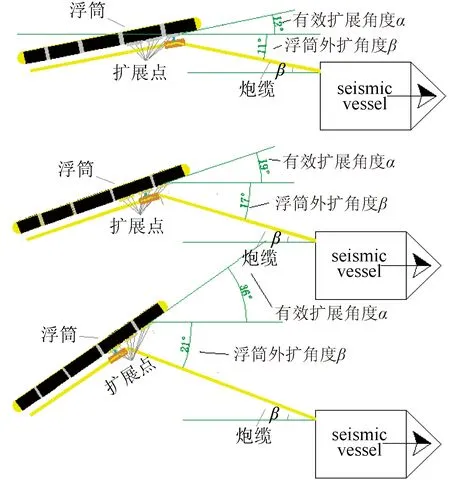
图8 调节炮缆和分水板不同连接位置改变α
第二种调节方法是通过调节炮缆和分水板间的绳索长度改变α(图9)。相同安装点位,改变连接绳索长度可有效改变α,绳索越长,α越大。
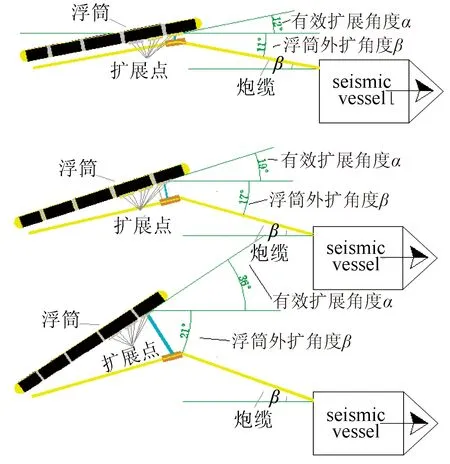
图9 调节连接绳索长度改变α
第三种方法是将上述两种方法搭配使用,也是常规做法。
4.3 基于硬浮体扩展理论的收放调节操作
阵列收放过程中容易出现枪阵交叉缠绕,如何避免是阵列操作人员必须要解决的问题。
假设浮体回收速度v1,浮体释放速度v2,船速va,浮体和流体间相对速度Δv=va+v1或Δv=va-v2。
4.3.1 单排枪阵回收过程
依据自扩理论:Δv变大,β变大;加大船舶的拖带力,β变大。
浮体、炮缆出现以下情况:①回收状态的浮体要向外扩展,和靠近的浮体间存在交叉缠绕风险;②炮缆承受的拉力变大。
操作方法:减小物探船动力输出,降低船速va,同时浮体在经过容易发生交叉位置时减小v1,目的是在关键区域位置处稳定或减小β,控制浮体在安全范围以内,避免和旁边的浮体发生碰撞、交叉、缠绕,同时减小炮缆的受力,对炮缆起保护作用。回收操作时,应控制船速在合理范围,并灵活控制浮体回收速度。
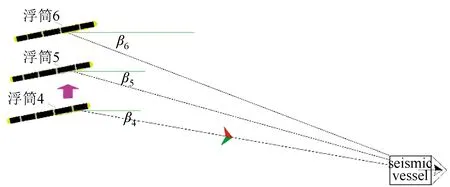
图10 浮体回收状态
4.3.2 单排枪阵释放过程
依据枪阵自扩理论: Δv变小,β也要变小;加大船舶拖带力,即β要变大,减小时则相反。
浮体、炮缆出现的情况:①释放中的浮体容易撞到已经释放好的浮体,并发生交缠缠绕;②炮缆上的牵引力变小,释放过程中,绞盘上的炮缆松弛,排列不紧,容易跳出绞盘,造成事故。
操作方法:加大物探船动力输出,此时释放好的浮体β要增大,如图11,β5、β6增大,同时加快本浮体的释放速度v2,如此操作可减小或保持该浮体的β4,伴随各浮体的横向位移,浮体在空间上会互相错开,避免交叉缠绕。适当加大船速,炮缆上的拉力加大,可避免炮缆松弛脱出绞盘的事故发生。
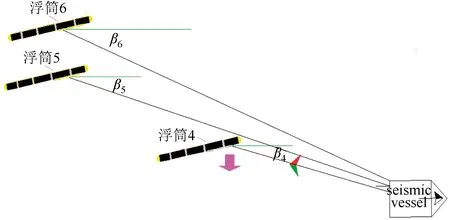
图11 浮体初始释放状态
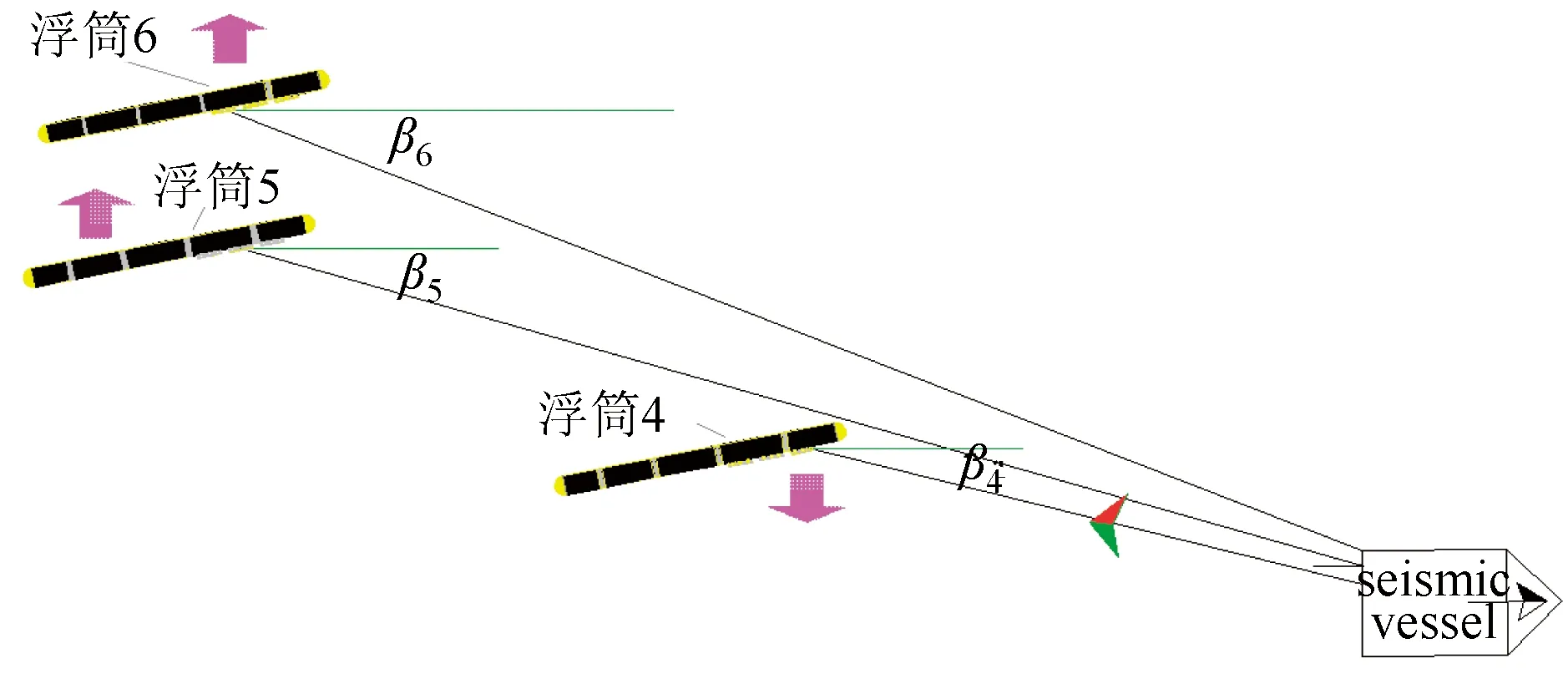
图12 加大船速va,加快浮体释放速度v2时的状态
如图13,在释放第4排枪阵时,加大船速va的同时,同步回收第5、6排枪阵,可以使β5和β6明显变大,同时加快第4排枪阵的释放速度,可明显减小β4,第4排枪阵和第5、6排枪阵的横向间距明显变大,可避免交叉事件的发生。

图13 加大va, v2,同步回收浮体5和6的状态
4.3.3 阵列同步释放操作
根据自扩理论: Δv变大,β变大。在同步释放枪阵时,会出现所有浮体的β都变小的情况,三排浮体在释放的过程中贴合缠绕风险加大(图14)。
操作方法:如图15所示,加大船速va并同时减小释放速度vb,使Δv不变或变大,即Δv=va-v2,所有浮体的扩力要加大,β保持不变或变大,降低或消除缠绕风险。
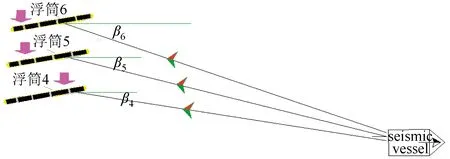
图14 阵列同步释放
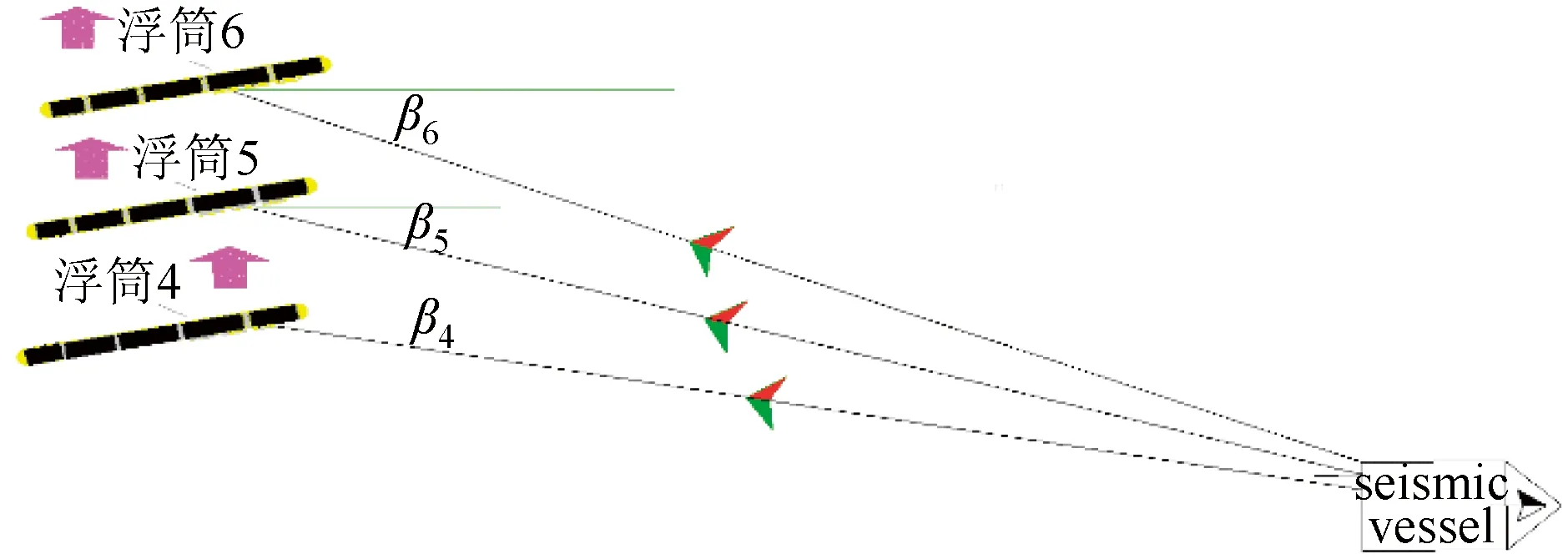
图15 加大va,减小v2阵列同步释放状态
4.3.4 阵列同步回收操作
浮体和流体间相对速度Δv=va+v1,根据自扩理论:Δv变大,β也要变大;浮体和流体之间相对速度Δv变大,流体阻力变大(图16)。

图16 阵列同步回收的状态
在阵列同步回收时,出现的情况:①浮体和流体的相对速度Δv=va+v1,Δv变大,浮体扩展角度β变大;②浮体阻力Fb和炮缆的受力Fa要变大。常规情况下不容易发生枪阵交叉事件,但炮缆的受力加大,回收阻力加大。
操作方法:出于保护炮缆和减小回收阻力并提高回收速度的目的,通常减小船速va,控制β在合理范围内,提高回收效率。
5 结语
本文以硬浮体为研究对象,采用变量分析方法,研究硬浮体自扩原理,对浮体从起始扩展到动态平衡的过程建立基本力学模型,从变量的常态变化入手,分析浮体的扩展动态,得出硬浮体自扩的相关结论,同时为阵列扩展设计及应用提供理论支持。
猜你喜欢
水上消防(2021年4期)2021-11-05 08:51:28
上海海事大学学报(2019年4期)2019-12-30 01:36:40
珠江水运(2018年5期)2018-04-12 16:48:04
水利科技与经济(2017年6期)2017-04-28 08:30:20
杭州(2015年9期)2015-12-21 02:51:38
中国水运(2015年10期)2015-11-09 15:01:47
江南诗(2015年3期)2015-06-01 17:17:00
中国水运(2015年2期)2015-04-23 15:04:07
河南科技(2014年22期)2014-02-27 14:18:13
河南科技(2014年7期)2014-02-27 14:11:07
