
振动式核桃采摘机关键部件设计与分析*
2024-02-25 08:55:08谷润润孙宇杰刘士真郑白开魏中毅吴业北
南方农机 2024年4期
谷润润 ,孙宇杰 ,刘士真 ,郑白开 ,冯 浩 ,魏中毅 ,吴业北
(新疆理工学院,新疆 阿克苏 843000)
目前,我国核桃种植面积与产量稳居世界第一,核桃种植分布较广,主要集中分布在云南和新疆。据统计,2020 年云南与新疆核桃产量分别为1 502 706 t和1 154 114 t[1]。当前核桃的种植面积不断增多,但核桃机械化采收在核桃产业整体发展过程中存在不足。比如国内当前对核桃进行采摘时,大部分利用拖拉机发动机的动力输出轴带动简单的振动装置或振动器依靠振动频率迫使树干做与之相应的振动,将核桃从树上振落,如有未掉落的核桃,通常是人工使用棍棒敲打核桃树枝干,将核桃打落后再通过人工将掉落在地上的核桃收集起来。该方式导致人工捡拾核桃作业劳动强度大,耗费时间多[2]。而国外一些大型的核桃种植园,为了减轻工作人员采摘核桃的劳动负担,目前通常使用大型的核桃采摘机对核桃进行采摘[3]。由于我国核桃主要种植在山区和丘陵地带,核桃种植较分散,各个地区在种植模式上有差异,所以国外一些大型核桃采摘机不适合用于国内核桃采摘。因此,本文根据当前我国核桃的实际种植模式与特点,研究了一种小型核桃采摘设备,以提高核桃机械化采收效率[4]。
1 整体结构设计与作业流程
1.1 整体结构设计
振动式核桃采摘机主要由夹持高度调节机构、振动调节机构、收集网、动力输入单元、行走机构、机架等组成,其总体结构如图1所示。
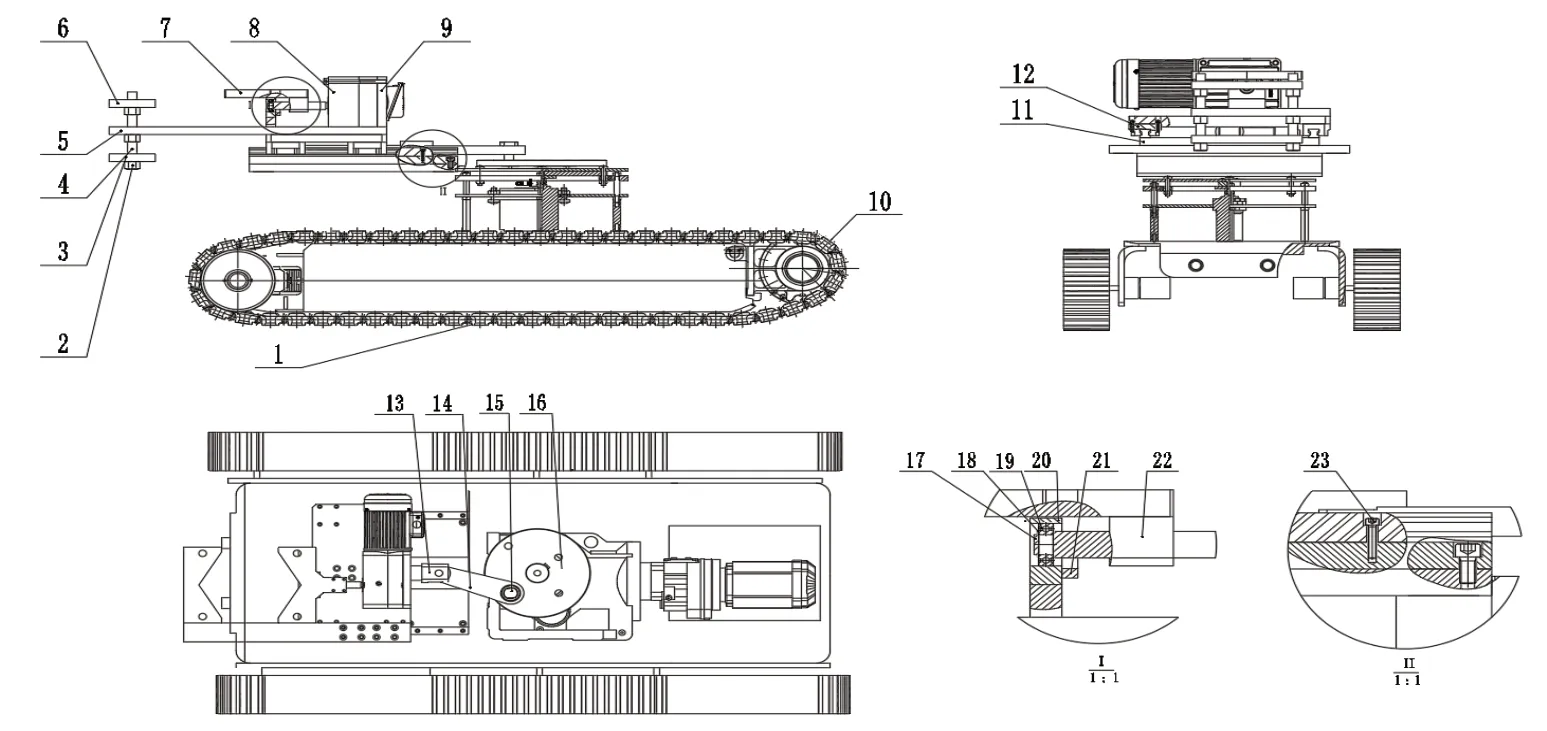
图1 振动式核桃采摘机结构示意图
1.2 采收作业流程
在采收核桃的过程中,首先用采收夹持爪夹持核桃树的树干,然后启动电机通过减速器减速以后将能量通过传动轴输送给振动头,曲柄的旋转带动滑块移动,从而产生振动,进一步使采收夹持爪产生的机械振动传递给树干。树干在外加载荷的激励下将以一定的振幅和周期振动,从而带动树干上的果实以一定的振动形式振动并加速运动,当果实所受惯性力大于其果柄拉断力时,果实受到振动力后在惯性力的作用下脱落至收集装置中,完成核桃的采收工作[5]。
2 关键工作部件的设计
2.1 夹持机构的设计
夹持机构是核桃采收装置的主要部件,能夹紧树干,在振动过程中将振动力传递给树干。课题组所设计的夹持机构是在振动场合下工作,夹持机构由伸缩杆、螺杆、夹持爪、弹性带等组成,夹持机构的开闭动作由电机控制。根据核桃树干直径大小,通过伸缩杆调节夹持爪前后相对距离,以满足夹持爪对树干的夹持要求;振动臂与曲柄连杆末端的推杆连接,随着推杆的往复直线运动而达到振动目的;螺杆用于连接和支撑两个夹持爪,以保证夹持爪的夹持功能;夹持爪是夹持机构的核心部件,可根据核桃树干直径大小松开和张紧,实现夹持爪牢牢抱住核桃树干;弹性带的主要功能是缓冲振动,以减少采收装置在振动过程中对树干外皮的损伤,弹性带一般使用普通橡胶带,弹性带的弹性又可以使夹持爪更稳定地夹持树干[6]。夹持机构工作时,夹持动作可靠且稳定。夹持机构如图2所示。
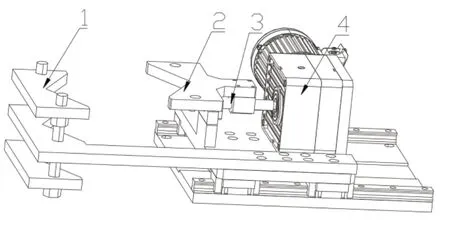
图2 夹持机构结构示意图
2.2 曲柄滑块机构的设计
曲柄滑块有两种形式,分别为偏心式与对心式,而偏置曲柄滑块可将曲柄的圆周运动转换为滑块的往复直线运动。本文采用偏心轮式曲柄的偏置曲柄滑块机构。采收装置的振动机构即为滑块,偏心轮式曲柄与传动轴采用螺纹连接,连杆与推杆和偏心曲柄连接,通过偏心曲柄上的槽实现行程可调,通过控制推杆的长度实现振动机构的往复直线运动,从而有效地实现振动。
2.3 收集装置及机架的设计
核桃收集装置主要由支撑杆、集果箱、支架、篷布等组成。果园核桃采收装置能够在核桃园自由行走,方便果园核桃的采收作业。由于核桃果园的路面不平整,因此本文采用履带式行走装置,该装置适合在密植型核桃果园行走,而且操作空间要求小,前轮与后轮轮距均为2 000 mm,行驶速度控制在4 km/h~8 km/h,可根据实际工作情况进行变频调速。固定杆上挂接果实收集篷布,果实收集箱位于收集篷布底部,机架的底座下安装履带式行走轮。在作业时,该装置自动行驶至树干位置,并且利用夹持机构夹持树干开始工作。当振落的核桃果实落到果实收集篷布上时,果实会顺着倾斜面滚落到果实收集篷布物料出口,进入果实收集箱,果实收集满之后更换果实收集箱,将果实卸载,完成一次核桃的收集[7]。
3 夹持爪的静力学分析
夹持机构是核桃采摘机的关键部件,在采摘核桃的过程中夹持爪夹持核桃树干,树干需承受一定的夹持力,如果夹持力太大,可能会损伤树干。因此,利用ANSYS 软件对夹持爪进行应力应变分析来验证结构设计的合理性,使核桃采摘机夹持机构能够很好地满足工作需要。
将夹持机构三维实体模型导入A N S Y S Workbench 中,为了便于分析夹持爪,需要对其进行简化,删除无用零件。对其进行材料属性添加,夹持爪的材料为合金钢,弹性模量为200 GPa,密度为7 850 kg/m3,泊松比为0.3。对夹持爪三维模型进行网格划分,网格大小设置为5 mm,划分后单元数量为6 732个[8],网格划分结果如图3所示。

图3 网格划分结果
对夹持爪施加边界条件和载荷,其中,在螺栓孔施加固定支撑约束[9],在夹持爪施加1.4 N的夹紧力,如图4所示。在对夹持爪施加约束载荷后,对其进行应力应变分析[10],夹持爪应力应变分析云图如图5所示。
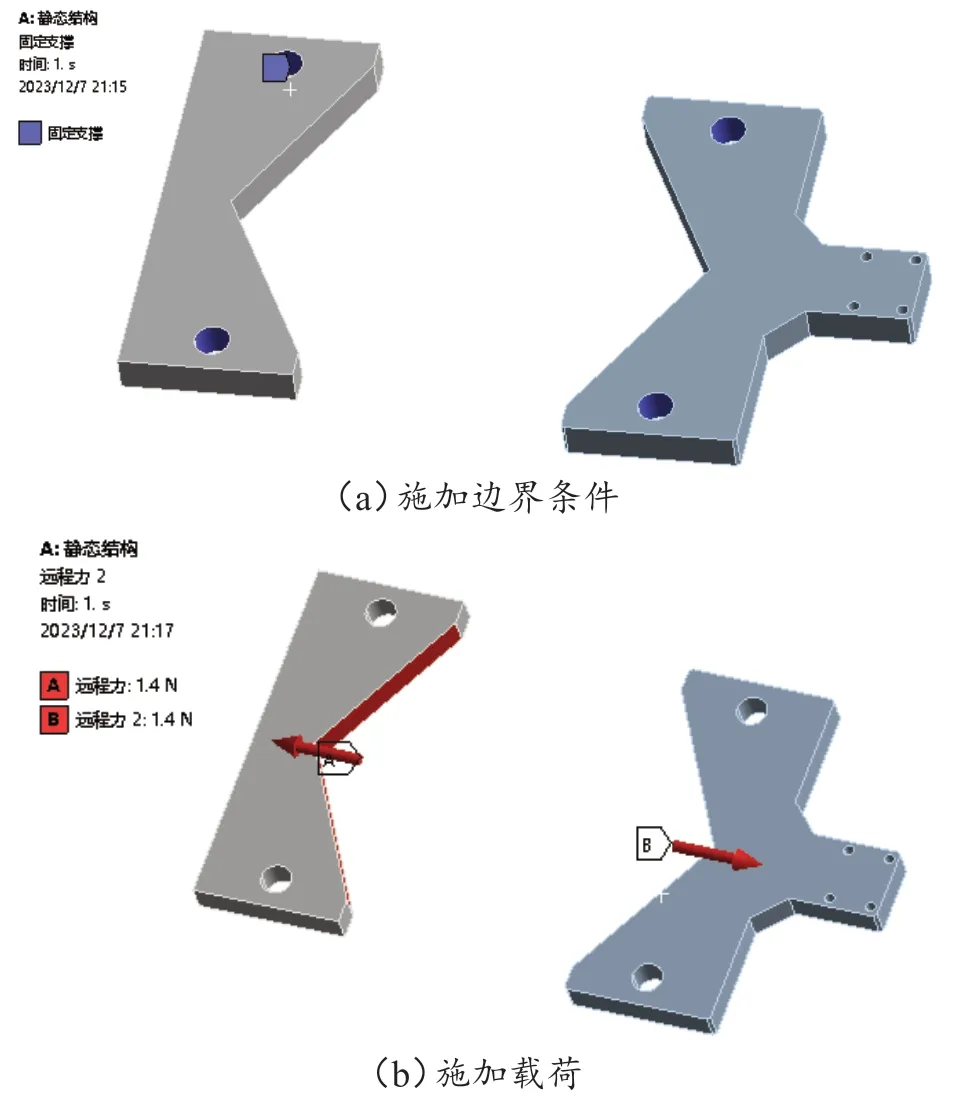
图4 夹持爪施加边界条件和载荷
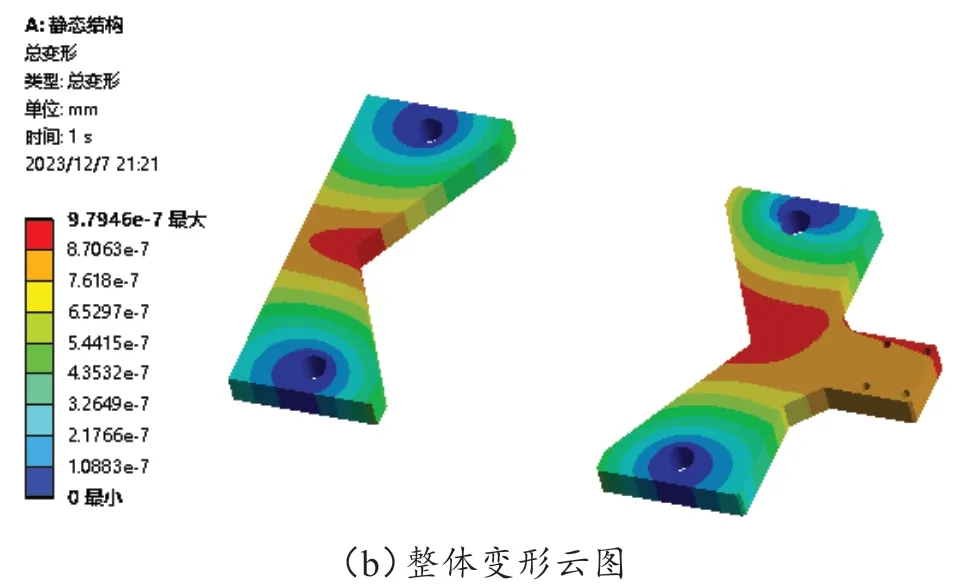
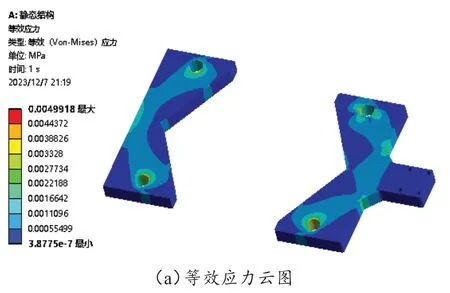
图5 夹持爪应力应变分析云图
从等效应力云图可以看出,最大等效应力为0.004 991 8 MPa,远远小于中合金钢的许用应力,由此可见在该工况下夹持爪符合强度要求。由整体变形云图可知,最大变形为9.794 6×10-7mm,变形量较小,远远小于夹持爪的许可变形量,因此夹持爪符合刚度要求。综上,ANSYS 软件分析结果表明,夹持爪的设计安全可靠。
4 结论
课题组结合核桃采收的技术要求、核桃园的作业环境以及采摘对象的物理特性,采用树干振动采收形式,提出了一种自动化夹持核桃树干的振动式采收方案,研究并设计了一种振动式核桃采摘机,旨在解决人工采收核桃费时、费力、效率低等问题。课题组对所设计的振动式核桃采摘机进行三维建模与静力学分析,结果表明,该采摘机能够高效地完成核桃的采收工作,并且采摘效率高、适用范围广,具有较高的稳定性,能够降低人工采摘核桃的劳动强度和采摘成本。本研究可为核桃采收设备的研发提供一定的理论依据与技术支持。
猜你喜欢
时代汽车(2023年7期)2023-03-29 09:38:44
机械工程师(2021年4期)2021-04-19 07:27:56
设备管理与维修(2019年22期)2019-12-19 01:30:12
设备管理与维修(2018年15期)2018-11-08 06:14:50
机械研究与应用(2018年5期)2018-11-05 05:59:38
设备管理与维修(2018年8期)2018-08-13 12:09:14
中国核电(2017年1期)2017-05-17 06:10:00
河南科技(2014年6期)2014-02-27 14:06:47
中南大学学报(自然科学版)(2012年8期)2012-09-17 03:26:26
铁道货运(2011年10期)2011-08-15 00:46:26
