
站立下肢康复训练器的研发
2024-01-09 21:57刘博陆英男花鹏
经济技术协作信息 2023年10期
关键词:研发
刘博 陆英男 花鹏


摘 要:针对我国人口老龄化问题日益加重、失能老人尤其是下肢功能障碍老人数量增加的问题,为了提高老人的自主生活能力及后期生活质量,减少家属及护理人员的负担,我公司研制了一款新型的站立下肢康复训练器,旨在帮助下肢功能障碍老人进行下肢功能恢复训练,该产品使用安全,康复功能强大,适用范围广泛,可以解决下肢康复过程中的绝大部分问题,从而帮助患者提高生活質量。
关键词:下肢康复;功能训练;研发
一、背景
随着我国医疗技术的发展,我国的人均寿命不断延长,已达77.0岁。人均寿命延长固然可喜,但人口老龄化的问题随之而来[1],截至2022年底,我国60岁以上老年人口数量达2.12亿,占总人口的15.5%,失能老人超过3800万人,根据《中国脑卒中防治报告(2022)》显示,我国脑卒中患病率呈上升趋势,由此引发的下肢功能障碍如果缺乏后续康复治疗和训练,将会导致肌肉萎缩、溃烂甚至人体相关机能丧失,进而严重影响患者的后续生活质量[2]。目前国内市场缺少相应的下肢康复训练设备,已有设备不能很好地进行下肢康复全面训练,同时专业康复训练人员储备严重不足,人工辅助康复强度大。因此,我公司设计了一款专门针对下肢功能康复的新型站立下肢康复训练器,该新型设备可实现整体升降,起立角度自由调节,康复运动速度可由康复医生在上位机上自主设定,具有主动、被动两种训练模式,同时设备可进行痉挛检测及足底压力检测,超出设定范围可自主停机保证使用者安全,同时该设备可极大地减轻辅助康复人员工作强度,具有很高的社会效益[3]。
二、构成及工作原理
站立下肢康复训练器主要由底座部、整体升降部、下肢训练部及床体等4部分组成,其中整体升降部铰接在底座部上,二者之间安装有水平高度调节电动推杆,通过水平高度调节电动推杆的伸缩完成高度的调节,下肢训练部通过两侧转轴与整体升降部铰接固定,二者之间安装起立电动推杆,通过起立电动推杆伸缩可实现下肢训练部沿转轴旋转,进而从水平状态转动到垂直状态。下肢训练部与底座部之间在两侧安装有氮气弹簧,用以改善起立电动推杆的受力状态,对整体起立床架起到辅助支撑作用。同时为确保设备使用时的安全性,在下肢训练部达到竖直状态时设置机械限位装置,整体升降部与下肢训练部的轴连接件间设置有上限位挡块和下限位挡块,当下肢训练部在起立电动推杆的作用下起立到达90°时,两个限位挡块相互啮合,限定下肢训练部和整体升降部的相互转动,同时两个限位挡块表面覆盖有缓冲垫,进一步减小冲击。床体部下端通过转轴铰接固定在下肢训练部上,在下肢训练部及床体间通过铰接件固定安装有角度调节电动推杆,角度调节电动推杆通过伸缩可实现下肢训练部与床体间的角度变化,在进行下肢康复训练前床体与地面成平行状态,使用者首先躺在床体上,采取卧姿在床体上完成训练前的相关准备工作(包括调整身体姿态、固定身体位置等),之后通过医护人员操作起立电动推杆将使用者从卧姿慢慢转变为立姿,最后使用者通过下肢训练部带动进行包括模拟踏步在内的下肢康复相关训练,整个站立下肢康复训练器总体结构如图1所示:
(一)底座部分
底座部分主要由钢管及铰链焊接而成,底座部分承担包括整个设备及康复时使用者在内的全部重量,底座焊架上焊接铰链与训练器升降部分通过连接销轴相连接,使用时底部安装脚轮,脚轮采用万向刹车医用脚轮,方便设备的移动及驻停,具体结构如图2所示。
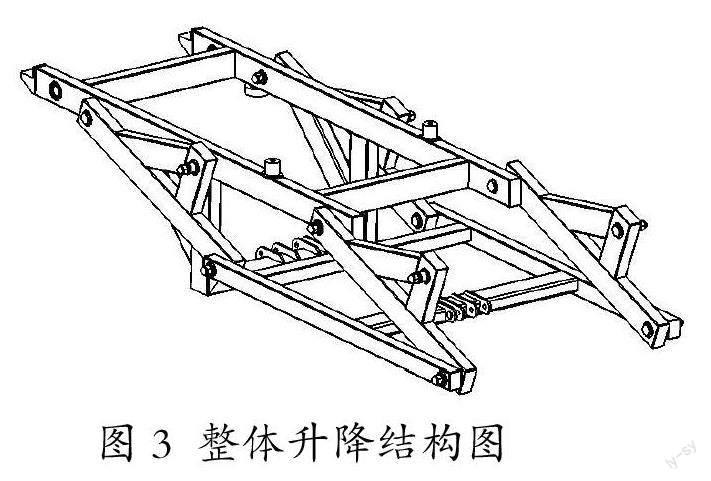
(二)整体升降部分
整体升降部分主要由上部升降焊架、下部升降焊架及升降转杆焊架3部分组成(图3),3部分通过连接销轴铰接而成,以上3部分组成平行四边形结构,在水平高度调节电动推杆及氮气弹簧的双重作用下,以上3部分之间发生相对位置变化,其组成的平行四边形的结构也发生变化,进而实现整个机构的上升与下降。整个机构通过连接销轴与底座部分及训练部分相连接,升降高度由康复医师通过手柄控制水平高度调节电动推杆伸缩进行调节(图4)。
(三)下肢训练部分
训练部分主要由抬膝驱动部分及脚部调节装置两部分组成。其中抬膝训练部分结构图如5所示,抬膝训练机构是整个装置的核心,也是完成康复训练的主要装置,其主要由驱动电机及减速器、绝对值位置编码器、主动齿轮、被动齿轮、导向轴、滚珠丝杠、膝部训练升降滑块、升降滑块铰链、抬膝推杆、直线滑轨及腿部固定部件组成。在训练过程中,康复医师根据使用者的实际情况设定康复训练各项指标(如训练模式、训练速度、训练时间、痉挛检测阈值等),训练开始时,膝部训练部驱动电机通过减速器开始驱动主动齿轮旋转,进行一级减速,同时绝对编码器记录主动齿轮位置并向上位机进行实时反馈,主动齿轮通过齿轮间啮合驱动从动齿轮转动完成二级减速,从动齿轮通过键连接带动滚珠丝杠旋转,丝杠旋转的同时丝母滑块在丝杠上进行上下往复移动,膝部训练升降滑块与丝母滑块通过螺钉紧固连接,随丝母滑块在丝杠上进行上下往复滑动运动。在膝部训练升降滑块上下运动的过程中,导向轴在纵向起导向作用,保证膝部训练升降滑块运动方向。膝部训练升降滑块与滑块铰链通过螺钉铰接,抬膝推杆通过连接销轴与滑块铰链连接,随着升降滑块沿导向轴上下往复运动,滑块铰链带动抬膝推杆前后摆动。同时为了弥补患者身高方面的差异,在抬膝推杆与膝部固定部分中用直线滑轨连接,膝部固定部分在抬膝推杆的推动下沿直线滑轨绕抬膝销轴进行摆动,膝部固定部分与患者下肢通过绑带相连,带动患者下肢进行康复训练,完成踏步模拟,帮助患者进行康复训练。该训练器具有主被动两种训练模式,可针对患者的不同情况由康复医师自主选择,同时在训练过程中,训练器可根据监测到的患者腿部力量数据实时调整主被动训练模式,保证患者进行最为有效的下肢康复训练。
此训练部分充分考虑使用者身形不同的情况,在训练部分中设置了脚部调节装置,具体结构如图6所示,脚踏板机构由脚踏焊接板、脚踏焊架、脚踏板、固定转轴、踏板转轴、锁紧手柄、应力传感器、应力传感器控制板、拉力弹簧构成。其中固定转轴用螺钉固定于脚踏焊板之上,固定转轴两侧分别安装有踏板转轴,踏板转轴上面安装有锁紧手柄,可实现踏板转轴在固定转轴上的位置调节。脚踏焊架安装在脚踏转轴之上,可在脚踏转轴上自由转动,脚踏焊架上端焊接有球形铰接件,脚踏板通过铰接件安装于脚踏焊架之上,可自由地调节脚踏板的角度,旁边的锁紧手柄起到锁紧和调节的作用,脚踏焊架后端固定通过拉伸弹簧与应力传感器相连接,拉伸弹簧起到缓冲作用,提高人体在康复训练过程中的舒适度。应力传感器固定于脚踏焊板之上,当患者进行踏步训练动作时,应力传感器可实时地将脚踏板受力情况进行采集,首先传递给应力传感器采集卡,再由应力传感器采集卡传递给上位机控制系统,康复医师可根据传感实时反馈数据调整训练参数,制定康复计划。
整个下肢训练部配有直线轴承与线性导向轴,脚踏装置与下肢抬膝装置通过导向轴及脚踏装置高度调节电动推杆相连,整个下肢训练部分整体结构如图7所示,脚踏装置通过高度调节电动推杆伸缩进行纵向位置调整,使直线轴承沿线性导向轴滑动,调节脚踏板的高度以满足不同身高者的使用需求。
此外,为避免意外,保证使用者在训练时的人身安全,该训练器配有痉挛检测系统,该系统可以监测在训练过程中瞬时电流变化进而判断患者腿部是否发生痉挛,在训练器上位机判断使用者发生痉挛时,训练器立即减速、反向旋转进而缓慢停车,保证使用者人身不受伤害,在医护人员使用者确认使用者安全,判定痉挛解除后,手动操作发出继续训练指令,训练器在接到指令后将再次正常运转。
(四)床体部分
该康复训练器在水平放置时可供患者平躺并做训练前的准备,该训练器床体由钢管焊架加木质床板组成,配有记忆棉床垫。进行训练时,可通过电动推杆作用调整与训练部所成角度以保证使用者可以以一种最为舒适的姿态进行下肢康复训练,床体部分配备悬挂绑带,使用者通过绑带将自身大部分重量悬挂于床体本体上。
该下肢站立康復训练器设计充分考虑人体工程学及相关标准,允许使用者最大身高200cm,最大负载170kg,最大腿部负载50kg,整体升降高度0mm~300mm,起立角度0°~90°,后仰调节角度0°~15°,可调节摆腿速度8~60 steps/min,均符合国家相关标准及人体工程学,适合下肢功能障碍患者使用。
结语
本文设计的站立下肢康复训练器将广泛应用于下肢功能障碍患者的康复治疗中。在训练开始前康复医师可根据患者实际康复情况制定训练方案,设定数值,具有很强的针对性。同时,在训练中,设备可根据患者实际情况切换主被动训练模式,以达到更好的训练效果,同时该训练器配有力传感器和痉挛检测系统,可实时监控患者康复过程中的状态,保证使用者的使用安全。最后,该训练器可调整整体高度及起立角度,可满足不同使用者使用需求。本次研发的产品技术含量较高,具有目前国内市场相关产品所不具备的相关功能,各项参数均符合相关国家标准及人体工程学,使用方便,安全可靠,市场前景广泛。
参考文献:
[1]丁敏,李建民,吴庆文,等.下肢步态康复机器人:研究进展及临床应用[J].中国组织工程研究,2010,14(35):6604-6607.
[2]田姗姗,冯立艳,吴卓繁,等. 下肢康复机器人机构设计及运动学分析[J].华北理工大学学报:自然科学版,2017,39(01):96-101.
[3]倪文彬,瞿志俊,张建云,等.一种步态康复训练机器人设计[J].机械科学与技术,2016,35(11):1665-1672.
猜你喜欢
企业技术开发·下旬刊(2016年11期)2016-12-27
山东工业技术(2016年23期)2016-12-23
时代金融(2016年27期)2016-11-25
科技视界(2016年25期)2016-11-25
知音励志·社科版(2016年9期)2016-11-09
科学与财富(2016年28期)2016-10-14
商(2016年19期)2016-06-27
科技视界(2016年7期)2016-04-01
商场现代化(2016年1期)2016-03-18
