基于DMD和改进胶囊网络的变工况轴承故障诊断方法
2024-01-06 01:08:38李俊卿胡晓东耿继亚张承志王罗何玉灵
电机与控制学报 2023年11期
李俊卿, 胡晓东, 耿继亚, 张承志, 王罗, 何玉灵
(1.华北电力大学 电气与电子工程学院,河北 保定 071000; 2.中国长江三峡集团有限公司,北京100038; 3.华北电力大学 机械工程系,河北 保定 071000)
0 引 言
轴承是电机的关键部件之一,它直接关系到电机的安全稳定运行[1]。由于轴承与电机其他部位联系紧密,若轴承的故障未被及时发现并清除,可能会导致整个电机异常,造成巨大经济损失。对滚动轴承的早期故障进行及时、准确的诊断,可以有效地解决设备的潜在故障,提高设备的运行经济性和利用率[2]。然而实际中轴承运行工况复杂多变,轴承振动信号不仅受到多种噪声影响,而且受到转速变化的干扰;另外,轴承故障实验成本较大,实际中往往只有很少的故障样本。因此,如何在不同工况下和小样本条件下实现轴承的精确故障诊断成为当前的研究热点之一。
在轴承的故障诊断方向上,对轴承的振动信号进行处理是很有必要的[3]。近年来,针对非平稳和非线性的振动信号,出现了各种有效的信号分解方法,并已经应用于轴承的故障诊断中[4]。文献[5]采用小波变换对振动数据进行降噪处理,然后结合Hilbert变换实现轴承的故障诊断,虽然小波变换具有构造简单的特点,但是欠缺自适应能力,不适用于对复杂信号的分析;文献[6]采用经验模式分解对振动信号进行预处理,得到固有模态函数后采用随机森林算法进行故障分类,取得了较好的分类效果,但是经验模式分解存在较严重的模态混叠和端点效应问题;文献[7]采用集合经验模式分解对轴承振动信号分解,并采用峭度准则选取分解后的信号分量,也取得了不错的效果,但集合经验模式分解受残余噪声的影响较大;为了解决以上这些算法存在的问题,近年兴起的奇异谱分解算法在故障诊断领域得到了广泛应用,文献[8]将采集的信号构建成信号矩阵,然后采用奇异谱分解得到奇异谱分量;文献[9]结合了改进奇异谱分解和奇异值分解对齿轮故障特征进行提取,根据峭度值最大准则筛选出最佳奇异谱分量并进行奇异值分解处理,利用奇异值能量标准谱自适应确定重构信号阶数实现信号还原和信号降噪。以上算法大多应用于单一传感器信号的分解处理中,忽略了信号间的耦合关系,造成信息丢失,对故障的描述失去整体性。动态模态分解(dynamic mode decomposition,DMD)最早兴起于流体动力学领域[10],是一种基于奇异值分解(singular value decomposition,SVD)的分解方法,是一种数据驱动方法,且不依赖于其他因素[11],不仅可以解决以上算法存在的问题,而且可以融合多个传感器的数据信息。DMD算法可以将提取的模态与时间矩阵进行内积,从而得到与原始信号高度相似的重构信号。DMD算法为复杂的多个传感器信号下的故障诊断提供了一种新的研究思路和手段。
如果仅依靠以上信号分解方法对振动信号进行处理,往往达不到理想的诊断效果。随着人工智能的发展,机器学习逐渐代替了人工进行特征提取,而且众多实验证明诊断效果比较理想。文献[12]采用麻雀优化算法对支持向量机的参数进行优化,然后将其应用于滚动轴承的故障诊断,取得了较高的诊断正确率,但是机器学习网络学习能力有限,难以将其应用于复杂工况下的轴承故障诊断。深度学习自2006年被提出后,已经广泛应用于各个领域[13]。文献[14] 采用卷积神经网络(convolutional neural network,CNN)对滚动轴承进行故障诊断,并结合了注意力机制,达到了良好的分类效果和较高的诊断准确率;文献[15]利用连续小波变换将振动数据转为时频图,然后搭建了含批量归一化和随机失活的卷积神经网络中进行故障诊断,在测试集上达到了较高的准确率;文献[16]针对实际工程中传感器的结构,提出了多传感器卷积神经网络,结果表明该方法诊断效果良好并且具备较高的稳定性。虽然CNN具有超强的学习能力,但未考虑特征之间的关联,另外,最大池化层只保留最活跃的神经元,这无疑会在一定程度上造成信息丢失。2017年,Sabour等人提出了胶囊网络模型(capsule network,CN)[17],CN模型突破常规,将传统的标量的神经元转换为向量,可以在极大程度上挖掘数据信息的空间特征。目前,国内外少有研究人员将胶囊网络应用于轴承的故障诊断中。
本文提出一种基于DMD和改进胶囊网络(improved capsule network,ICN)的轴承故障诊断方法,用于诊断不同工况下的轴承发生的多种故障。首先获取多传感器采集的不同工况下各种运行状态的轴承振动信号以构建样本集;然后采用DMD对振动信号进行分解,计算DMD模态,并将各个模态按照能量大小进行排序,选取能量最大的模态对信号进行重构;进而采用连续小波变换将重构后的信号转换为有利于胶囊网络训练的彩色时频图;最后,将时频图输入改进后的胶囊网络进行训练,优化模型参数,实现轴承故障的精确诊断。
1 相关理论
1.1 动态模态分解(DMD)
假设有N个信号采集系统,且每个信号采集系统采集的信号共有m个,采集时间间隔为Δt。则将这些信号排列为一个矩阵,表示为
(1)
将X分解为如下2个矩阵:
(2)
对于一个线性系统,显然有
ψ1=Aψ0。
(3)
式中A包含丰富的非线性动力学信息,但当数据量很大时,高维矩阵使得计算量巨大,DMD算法首先要基于SVD求得A的最佳投影矩阵ADMD,然后针对ADMD进行相关计算,最后对原信号进行重构。具体过程如下:
1)对ψ0进行奇异值分解可得
ψ0=USVT。
(4)
式中:U∈Rm×r,S∈Rr×r,V∈Rr×(N-1),U×UT=I,V×VT=I,且r=rank(S)。
2)结合式(3)和式(4)可得
ADMD=UTAU=UTψ1VS-1。
(5)
式中经过变换后得到的ADMD和A在动力学特性上是近似的[18]。
3)求ADMD的特征值与特征向量,并将ADMD表示为
ADMD=YΛY-1。
(6)
式中:Y=[y1,y2,…,yr]为ADMD的特征向量;Λ是主对角线为ADMD的特征值的矩阵[λ1,λ2,…,λr]。
4)求A的第i阶模态
Φ=ψ1VS-1Y。
(7)
式中Φ=[φ1,φ2,…,φr]为A的模态。
5)令yi=ln(λr)/Δt,则原信号X可以近似重构为:
(8)
式中:Ω为主对角线为[λ1,λ2,…,λr]的对角矩阵;b为包含每个模态的幅值的向量;Γ为Moore-Penrose伪逆。
1.2 连续小波变换(CWT)
小波变换克服了傅里叶变换窗口大小不随频率变化的缺点,从而具备了更高的分辨率[19]。与离散小波变换相比,连续小波变换最大的特点就是生成的小波系数可以更加直观表达信号的全局特征,有利于更好地分析、辨别信号。对于一个信号f(t),其连续小波变换为
(9)
式中:a为尺度因子;b为平移因子;ψa,b(t)为小波基函数;ψ*为ψ的共轭复数。本文选取cmor作为小波基。
1.3 胶囊网络
在传统的神经网络中,各神经元均为标量,因此无法存储数据的空间信息。胶囊网络提出了以矢量作为输入和输出的概念,将各神经元转换为具备空间信息的矢量,并封装为胶囊的形式进行特征信息的传递[20],如图1所示。不同胶囊层之间通过动态路由机制进行信息传输,具体过程如下:
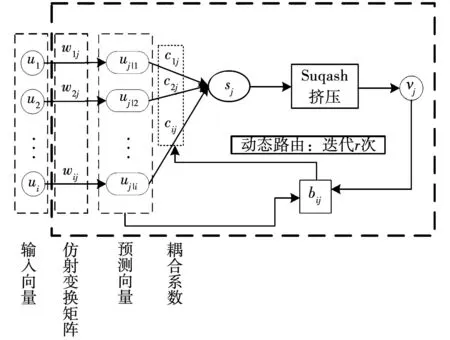
图1 胶囊网络结构
1)输入向量ui与仿射变换矩阵W中的元素wij相乘得到预测向量uj|i,即
uj|i=wijui。
(10)
2)将步骤1)中得到的预测向量uj|i与耦合系数cij进行加权求和,得到深层输入向量sj如下:
(11)
式中cij通过更新中间变量bij得到,即
(12)
3)利用suqash函数对sj进行压缩,该函数仅改变向量的大小,将sj压缩至0~1之间,但不改变sj的方向,得到输出向量vj。
4)采用动态路由算法不断迭代更新中间变量bij和耦合系数cij。首先将uj|i和vj进行内积计算,结果越大,则表明两者相关度越高,进而增大bij的值,反之则减小bij的值[21],如下:
bij←bij+uj|ivj。
(13)
然后按照式(12)更新cij的值,经过r次迭代,最终得到最优的输出向量vj。
2 基于DMD和改进胶囊网络的故障诊断方法
2.1 信号分解与重构方法
考虑到实际工业中用于采集信号的传感器并不是单一的,而且各个传感器在空间上有一定的联系,所以本文采用DMD算法将多传感器信号同时进行分解。得到原信号的各个模态后,首先剔除奇异值约等于0的模态,防止出现计算发散,然后采用能量值最大的模态对原信号进行重构,具体过程如下:
1)按下式计算模态的初值c:
c=Φ-1Ψ0。
(14)
2)对于不同模态和不同时间,采用下面范德蒙矩阵存储特征值变化:
(15)
3)按式(16)求各模态随时间的变化,然后将各模态的E中各元素的平方和作为其能量,并且按结果的大小将各模态排序,最终取能量最高的模态按公式(8)用于重构信号。
(16)
式中m为第m个模态。
2.2 改进的胶囊网络
为了使胶囊网络在样本较少和变工况的条件下能有更好的表现,本文在原有胶囊网络的基础上,加入了转置卷积。胶囊网络采用的网络层一般为卷积网络,卷积网络是一种下采样方式,这样的操作会使得特征图不变或缩小,图像的分辨率也由高变低,从而造成某些数据信息丢失,为了解决这一问题,本文在胶囊网络中引入转置卷积。转置卷积也称为反卷积,是一种上采样方式,得到的效果与卷积操作相反,将图像由低分辨率变为高分辨率。在胶囊网络中引入转置卷积也能起到数据增强的作用,从而使模型在变工况和小样本条件下能够有更好的诊断效果。本文的改进胶囊网络模型主要结构如表1所示。
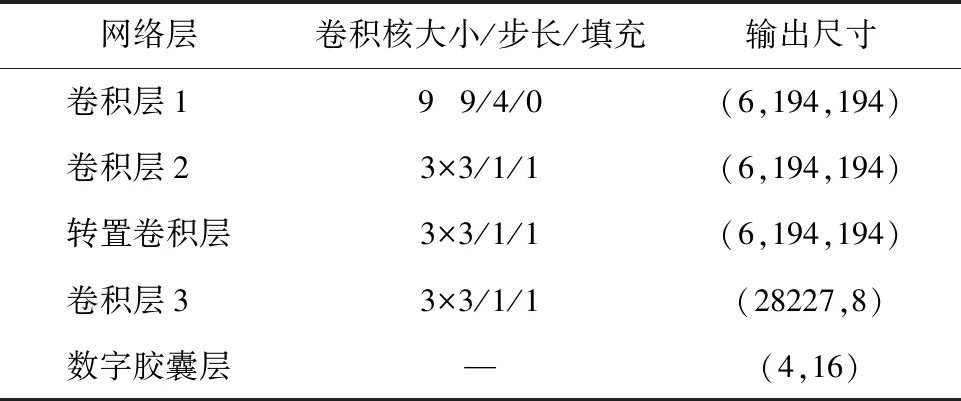
表1 模型主要结构
卷积层1的作用为初步提取特征,降低噪声影响;预胶囊层中包含卷积层和转置卷积层,通过下采样和上采样相结合的方式提取数据特征,并通过卷积层3进行整合,然后封装为胶囊,以向量的形式作为数字胶囊层的输入;数字胶囊层主要采用动态路由算法计算胶囊层间的相关度,更新耦合系数;输出层通过对向量的二范数求解,最终得到各个故障类型的概率分布。
2.3 损失函数与评价指标
1)损失函数。
在胶囊网络的训练中,仿射变换矩阵的元素通过损失函数的反向传播进行更新,间隔损失函数使胶囊网络的输出为一个长向量或几个短向量,向量的长度表示胶囊存在的概率,表达式为
Lk=Tkmax(0,0.9-‖vk‖)2+
λ(1-Tk)max(0,‖vk‖-0.1)2。
(17)
式中:k为第k类故障;Tk为表示分类结果(分类正确为1,反之取0);‖vk‖代表识别为k类故障的概率;λ为比例系数,取0.5。
2)评价指标。
本文采用准确率作为模型诊断结果的评价指标,正确分类的样本数用T表示,分类错误的样本数用F表示,则准确率表达式为
(18)
2.4 故障诊断流程
本文结合DMD和改进胶囊网络构建了一种可用于滚动轴承故障诊断的模型,其诊断流程如图2所示。
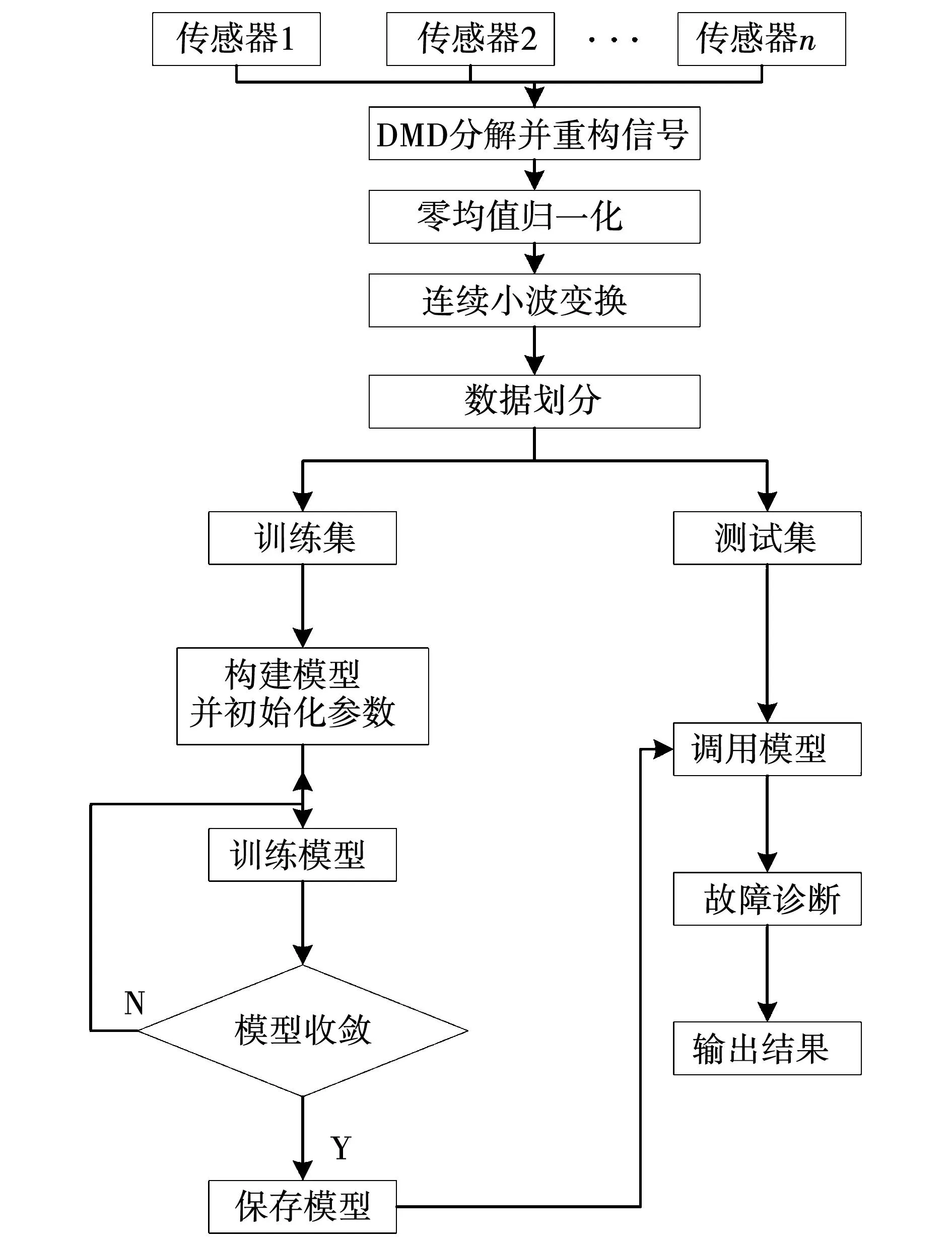
图2 本文方法流程图
具体步骤为:1)获取多传感器下的轴承振动数据;2)将获取的数据进行DMD分解,并使用能量值最大的模态对原信号进行重构;3)将数据进行零均值归一化,然后使用连续小波变换将信号转换为二维时频图;4)将数据划分为训练集和测试集;5)设计模型并初始化模型参数;6)用训练集训练模型,优化参数;7)使用测试集验证模型诊断效果。
3 仿真验证
为了说明重构信号不会改变原信号的频率特性,本文在Ansys平台搭建了滚动轴承外圈故障模型,模拟的是外圈内表面出现磨损的情况,如图3所示。所仿真模型内圈内半径为12.5 mm,内圈外半径为15.875 mm,外圈内半径为22.635 mm,外圈外半径为26 mm,滚动体半径为3.375 mm,滚动体个数为12个,轴承转速为1 300 r/min。在轴承外圈外表面的3点钟、6点钟和12点钟方向取3组振动加速度数据,分别称为传感器A、B和C信号。
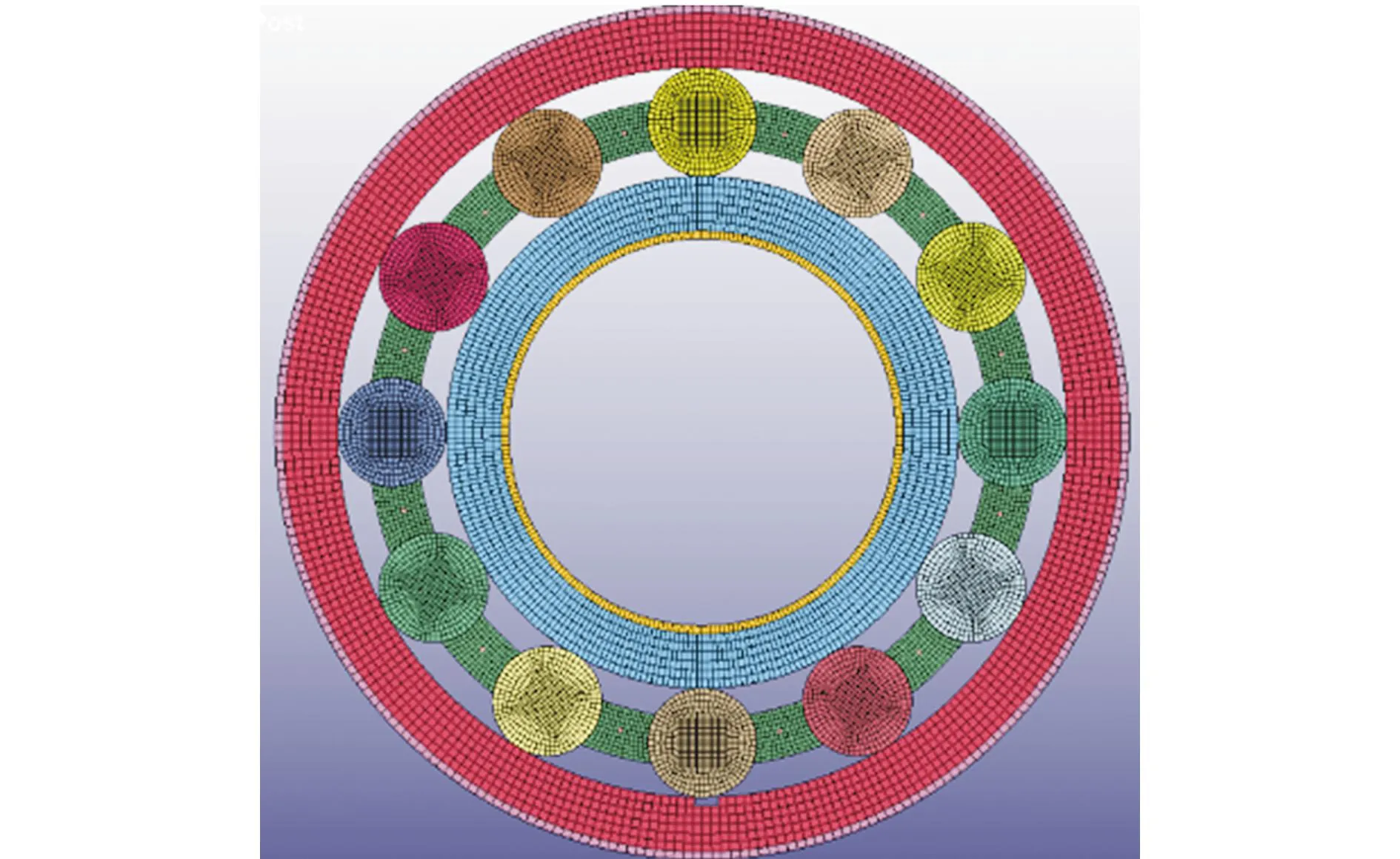
图3 外圈故障仿真模型
将传感器A、B和C信号进行DMD分解并重构,得到的信号如图4所示。
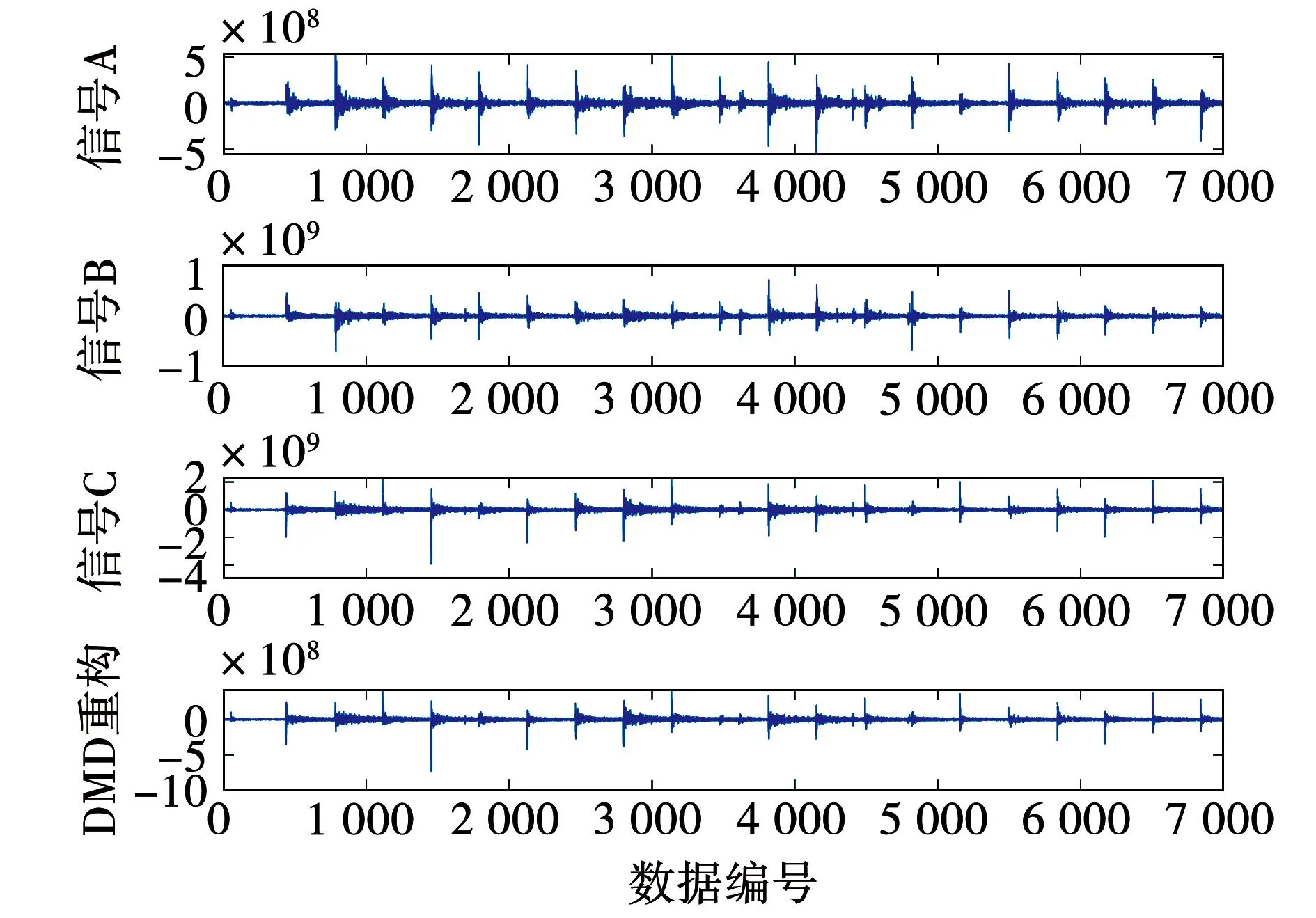
图4 仿真信号及重构信号
为了说明重构后的信号仍保持着原来的频率特性,传统的信号分析方法对重构后的信号也同样适用。本文采用希尔伯特变换对4个信号进行谱分析,结果如图5所示,可以看出,从4个信号中均能明显得到所仿真轴承的故障特征频率为108 Hz,且与理论值接近。
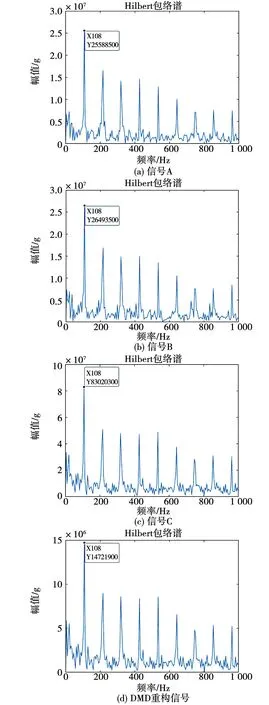
图5 各信号希尔伯特包络谱
4 实验验证
4.1 数据介绍
CWRU轴承数据集的试验台如图6所示,本文采用的数据采样频率为12 kHz,负载为0、1、3马力,转速为1 797、1 772、1 730 r/min,运行状态分为正常状态、内圈故障、外圈故障和滚动体故障,故障程度为0.1 778 mm。
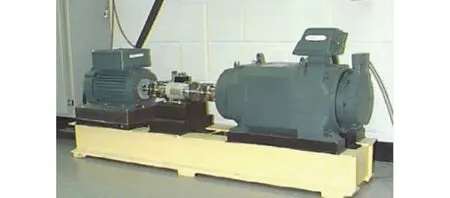
图6 CWRU数据采集实验台
用于采集信号的传感器包括驱动端传感器1、风扇端传感器2和基座传感器3。本文将各种运行状态的多传感器信号进行DMD分解并重构,然后将重构信号进行连续小波变换,得到784×784的二维时频图,作为一个样本。最终得到不同工况下,各种运行状态的训练样本100个,测试样本40个。
为了对比不同数量样本对模型诊断效果的影响,本文从各种故障的100个训练样本中随机选出20、60个构造了3种训练集;为了验证模型在不同运行工况下的泛化能力,本文按照与训练样本工况差异大小构造了3种测试集,其转速分别为1 797、1 772、1 730 r/min,负载分别为0、1、3马力。具体划分如表2所示。

表2 实验数据集
4.2 多传感器与单一传感器诊断效果对比
以内圈故障为例,本文采用的各传感器信号及DMD分解重构后的信号如图7所示。

图7 内圈故障下,不同传感器信号及重构信号
为了说明使用DMD处理多传感器信号的优势,本文选取各种故障状态下的某一个传感器信号进行连续小波变换,得到单一传感器下的轴承振动数据样本。采用单一传感器数据与采用多个传感器数据两种情况下的训练集中各种故障样本均为100个,共400个样本,对应工况如表2所示,为0马力、1 797 r/min。为了比较单一传感器信号用于故障诊断的效果与采用DMD将多个传感器信号分解重构后用于故障诊断的效果,分别使用两种情况下的样本对改进的胶囊网络进行训练,采用如表2所示的3种工况下的测试集a、b和c对训练好的模型进行测试,实验结果如表3所示。
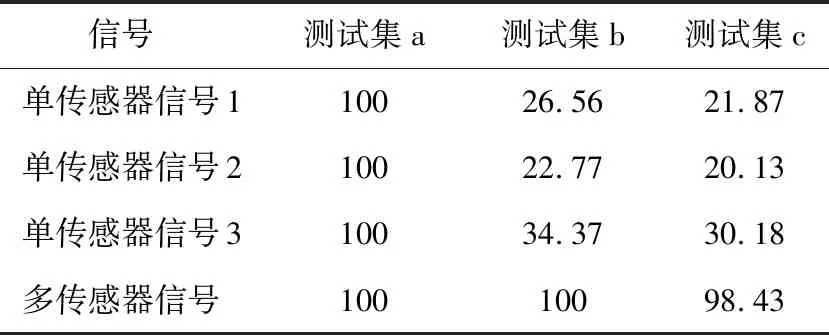
表3 多传感器与单传感器数据对模型诊断效果的影响
由表3可以看出,在与训练集运行工况相同的测试集a上,两者的诊断正确率均达到了100%,但是在不同运行工况下,单传感器数据使得模型的诊断正确率大大降低,而多传感器数据训练的模型诊断精度下降不多,这是因为DMD分解重构后的信号包含了更多的特征信息。因此,多传感器数据经过DMD分解重构后,能够更好地应对轴承运行工况的变化,达到较理想的诊断效果。
4.3 不同模型的诊断效果对比
为了进一步验证ICN的优势,本文选取未改进的CN和CNN网络作为对比,分别采用表2所示的3种数量的训练集A、B和C对各模型进行训练,并采用如表2所示的3种工况下的测试集a、b和c对训练好的模型进行测试。所用数据均为多个传感器信号经DMD分解重构后的数据。
4.3.1 相同工况下各模型诊断正确率对比
以训练集C为例,各个模型在训练过程中的损失函数和正确率变化情况如图8所示。

图8 各模型的损失值与正确率变化情况
由图可见,ICN收敛的速度明显快于CN和CNN,说明改进后的胶囊网络具备更强的学习能力。
在不同训练集下,各模型在相同工况下(测试集a)的诊断正确率如表4所示。
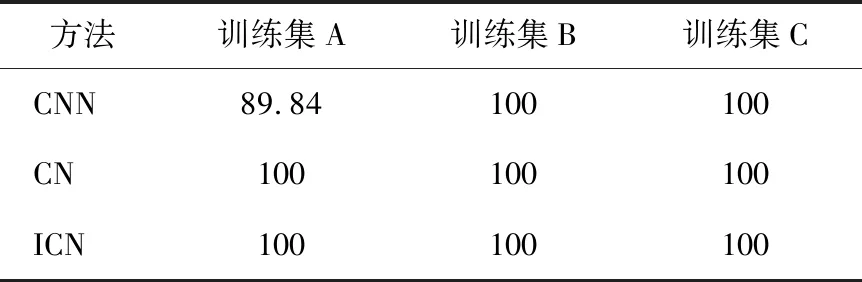
表4 不同模型在测试集a上的准确率
由表可以看出,训练集样本的数量会影响模型诊断效果,但当模型学习能力足够强时,即使在小样本数据上,模型也能取得不错的效果。
4.3.2 不同工况下各模型诊断正确率对比
在实际工业中,轴承的运行工况往往会发生改变,从而造成训练数据和测试数据的分布不一致,为了验证改进胶囊网络在不同工况下的泛化能力,使用表2中的测试集b和测试集c对各模型的诊断效果进行验证,实验结果如图9所示。其中“Ab”代表模型在训练集A上训练,在测试集b上进行测试,其他表示与此类似,故不再赘述。

图9 各种模型在不同测试集上的诊断正确率
由图9可以看出,在训练集A下,CNN模型在测试集b和测试集c上的正确率最高也未超过80%,CN模型在测试集b上效果较好,但在工况变化较大的测试集c上诊断正确率就大打折扣了,而ICN模型在测试集b和测试集c上的诊断正确率均保持在96%以上,说明ICN模型可以解决小样本条件下轴承变工况运行的故障诊断问题;在训练集B和训练集C下,CNN和CN在工况与训练数据接近的测试集b上能保持较高的准确率,但在工况变化较大的测试集c上,准确率出现了明显降低;而ICN模型在测试集b和测试集c上的诊断正确率均保持在较高水平。纵观CNN和CN模型在各数据集上的表现,不难看出CNN模型的诊断正确率较低,CN模型诊断正确率波动较大,所以不适合用于运行工况复杂的轴承故障诊断中,而本文提出的ICN模型很好地解决了CN模型存在的问题。综上所述,相较于CNN和CN,本文所提的ICN模型在小样本和变工况条件下,具备更强的故障诊断能力。
为了观察3种模型对4类运行状态的诊断分类结果,本文以训练集A和测试集c为例,绘制3种模型故障分类结果的混淆矩阵,如图10所示。
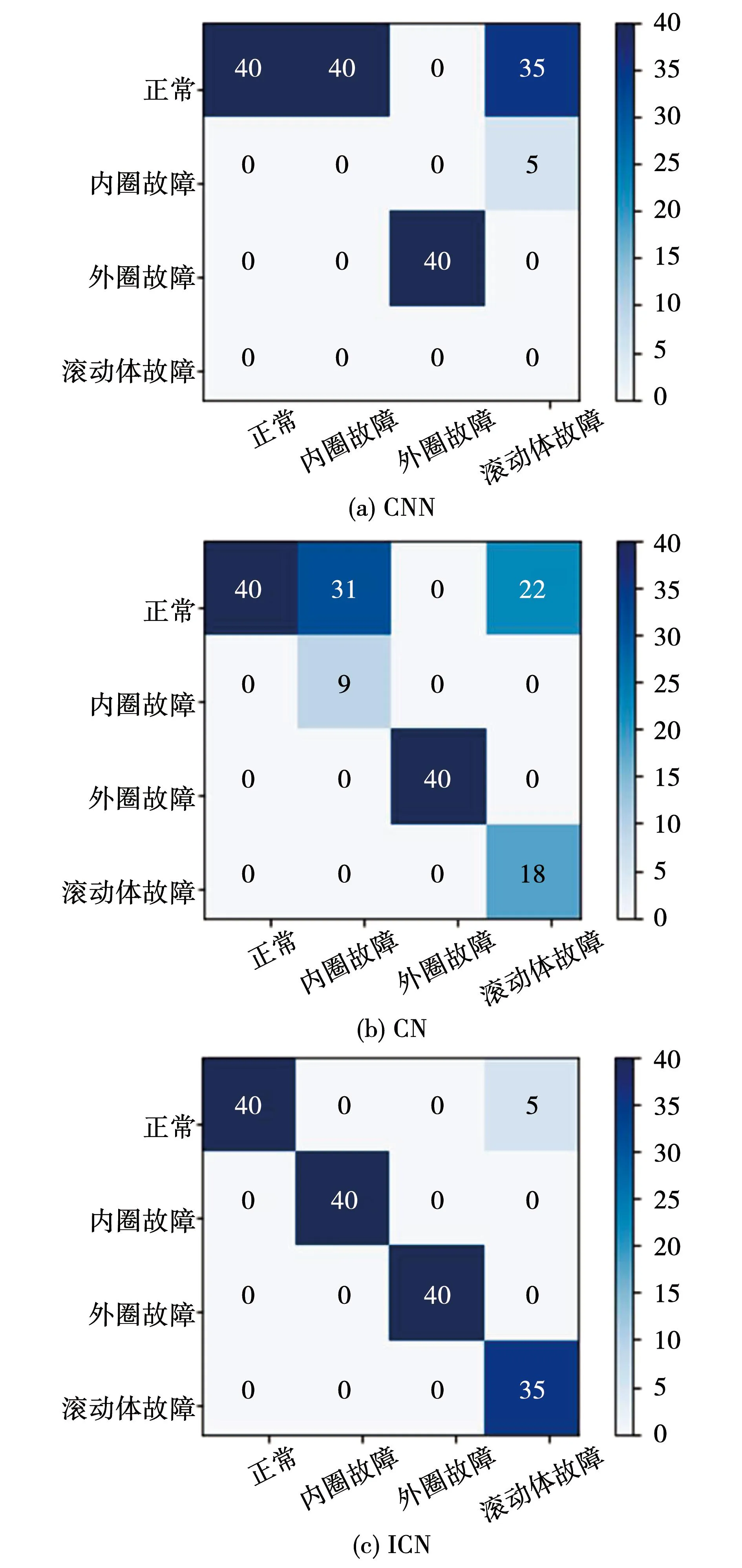
图10 不同模型诊断结果的混淆矩阵
由图10可见,3种模型均出现了错分的情况,其中CNN模型很好的辨别了正常状态和外圈故障,但对内圈故障和滚动体故障却丧失了辨别能力;相比CNN模型,CN模型对内圈故障和滚动体故障的辨别能力有所提高,但仍不理想;而ICN模型在160个测试样本中,仅将滚动体故障的5个样本错分为正常状态,相比前两个模型,诊断效果是较为理想的。
5 结 论
1)本文针对变工况下轴承的故障诊断,提出了一种结合动态模态分解和改进胶囊网络的智能故障诊断方法,实现了利用多传感器数据进行不同运行工况的轴承故障诊断。
2)经DMD分解重构后的信号在融合了3个信号的基础上,并没有改变其原有的频率特性,对于简单的故障诊断,传统的信号分解方法在重构信号上依然适用。
3)ICN模型结合了卷积神经网络的下采样和转置卷积网络的上采样,增强了模型对于故障特征的提取能力,胶囊网络将神经元矢量化,弥补了卷积网络在提取空间信息上的缺陷。
4)实验结果表明,相比于传统的CNN和CN网络,ICN模型对变工况下轴承的故障诊断具有更高的诊断正确率,另外,ICN模型同样可以在小样本条件下实现高效的轴承故障诊断。
猜你喜欢
哈尔滨轴承(2022年2期)2022-07-22 06:39:32
哈尔滨轴承(2022年1期)2022-05-23 13:13:24
摄影世界(2022年1期)2022-01-21 10:50:14
哈尔滨轴承(2021年2期)2021-08-12 06:11:46
哈尔滨轴承(2021年1期)2021-07-21 05:43:16
知识经济·中国直销(2018年12期)2018-12-29 12:22:14
商周刊(2017年6期)2017-08-22 03:42:36
山东大学法律评论(2016年0期)2016-08-16 03:24:12
重庆工商大学学报(自然科学版)(2015年10期)2015-12-28 07:43:58
振动、测试与诊断(2014年5期)2014-03-01 01:14:21