
基于人工智能策略及深度学习的行人过街交通信号控制器设计与策略研究
2024-01-03 01:04韩志方HANZhifang金辉JINHui
价值工程 2023年35期
韩志方HAN Zhi-fang;金辉JIN Hui
(辽宁工业大学,锦州 122000)
0 引言
我国属于交通高运量高发展国家,尤其在北上广等特大城市,月均交通出行均已破亿,其中上海在2023 年6 月的统计中月客流总量达到3.05 亿人次。在如此庞大的出行人群冲击下交通系统的载荷面临空前的挑战就目前研究显示,我国日常交通出行以混合型交通模式为主,即行人、机动车及非机动车的复合模式,当面临大流量和城市交通错综复杂的道路状态时,这种模式的出行风险有显著升高的趋势,这也是当下城市交通事故多发的一个理论性深层原因,尤其在道路交叉口信号控制枢纽等位置更是表现非常明显。为解决城市交通发展中的这一问题,各国在城市建设规划期就已有很多相关研究,例如20 世纪80 年代,由Pushkarev.B 等人掀起的交通信号系统控制研究,为之后广泛应用的路口信号灯奠定了理论基础[1]。又如,2000 年由美国交通部发布的《美国道路通行能力手册》在信号控制基础上加入了对行人特征因素及信号控制时间周期的的研究成果,更有针对性地对不同出行体模型特征进行了优化,减小了早期单一模型下的判断误差,开创了信号模型控制的时代[2]。近年来我国在行人交通信号控制领域发展迅猛,刘安阳等人在总结前人模型研究精髓的基础上通过Logit[3]统计模型进行基于行人间隙的行为规律模型统计,极大优化了信号控制策略。但上述研究弊端在于过分依赖固定性的参数变量,难以仿真出真实场景,具有一定的应用局限性,本文借助AI 深度学习机制,建立多参数动态模型机制,通过模拟不同场景的行人与信号灯交互模式,优化控制策略从而提升现有信号控制器的使用效率,提升交通出行的安全性。
1 深度学习下人行过街控制模型设计
在行人的特征性分析中,一般会考虑交通流理论中参数作为切入点,本文在人的行为模式判断中引入间隙理论将信号控制问题转化为人车冲突问题[4],尤其是在人与转弯车同行或车头距行人较远情况下,对于行人穿行的行为特征研究上如何提升安全管控效果,一般需要分别考虑城市道路交通信号配置的三种相位情况及这三种情况下机动车与行人可能发生冲突的区域及点位,如图1 所示。

图1 人车冲突的三种常见相位
当综合考虑人车混合状态时情况较为复杂,单一的线性分析已经不能满足对安全性与准确性的要求,故本研究在深度学习常用的模块YOLOv5s 基础之上,引入损失函数及Deep Sort 目标追踪算法[5],以最小算量实现轻量级的人车混合跟踪识别与预测。研究基础依靠深度卷积模型,通过合理的激活函数设置和损失函数阈值选取,在提升算法精准度的前提下,减少计算消耗,提升模型输出效率,整体结构模型如图2 所示。

图2 YOLOv5s 模型结构
一般而言如图2 所示,模型由输入层、网络化学习层和预测输出层组成,其中输入层主要进行图像信息的型制统一,即数据预处理。本模型原型基于YOLOv5s 进行改良,可进行图像尺寸识别更为宽泛,可最小实现1×1 的图像输入识别。网络化学习层主要进行基于特征值提取的学习训练,本模型特征提取依赖BottleNeck[6],特征向下复制传递依靠CSPNet,本模型的改进在于引入了CSPDarknet53,该模块可以显著减少计算与训练所需的网络结构及特征值参数总量,对于图片池化前的尺寸要求容忍度更高,相应最终信息融合度也更好。
综合上述,本文所述的研究模型在以往深度网络化的复杂高算力模型的基础上,进行了逻辑改良,引入了简化模块算法机制,在特征向量提取部分对单个图片进行切割和缩小,极大丰富了图片特征信息量,在后续算法网络中删除检测框中低置信度图片后,可对剩余部分进行还原,通过这一过程的改良大大降低了算法对算力的消耗和网络层的复杂度,同时由于特征值的增加也提高了算法准确率。
2 SD-YOLOv5 算法的仿真试验
首先对于基于YOLOv5 改进后的SD-YOLOv5 方法,进行实验条件确认,其应用场景多为交通路口或枢纽地带,检测目标多为行人及车辆,故在选取训练目标对象时针对这两项内容进行筛选,训练集与测试集按照7:3 进行数量划分。测试用工作软件环境选取如表1 所示。
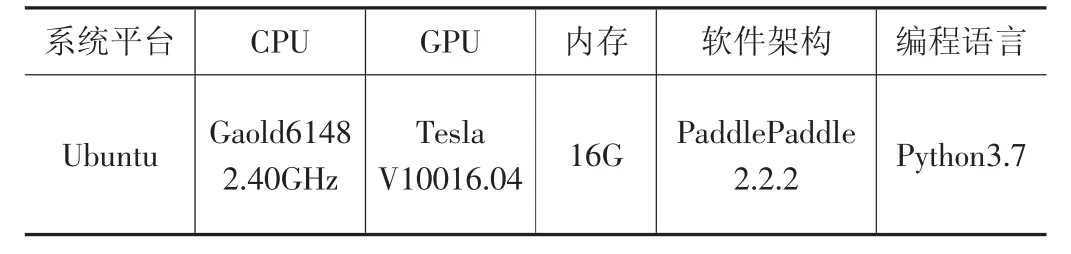
表1 试验用软件环境
在上述试验条件及本文上一章节所描述的模型方法的基础上,进行仿真测试,其具体步骤为:在训练之前,对数据集进行预处理,包括图像缩放、裁剪、亮度调整等,以适应YOLOv5 的输入要求和提高模型的性能。根据数据集和目标设置合适的训练参数,如学习率、批大小、迭代次数等。同时,确保计算资源(如GPU)的充足性,以加快模型训练的速度。在训练完成后,使用测试集对模型进行评估,计算模型的精度、召回率、F1 值等指标,以评估模型的性能。其输出的融合度图像如图3。
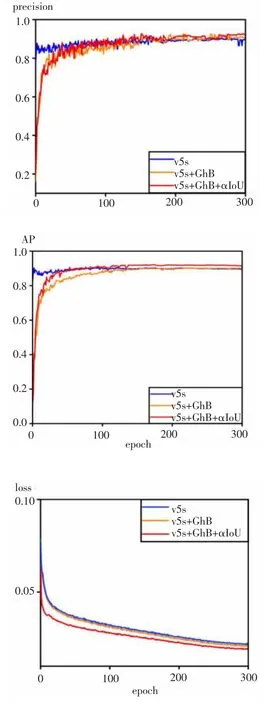
图3 仿真测试融合度对比图
图中YOLOv5s 简写为v5s ,Ghost-BottleNeck 模块简写为GhB,v5s+GhB+αIoU 即为本文提出的SD -YOLOv5 行人检测方法,GFLOPs 和参数量是衡量神经网络模型计算量和参数数量的指标。检测速度是指目标检测的推理速度,以毫秒(ms)为单位。GIoU 和αIoU 是两种不同的定位损失函数,αIoU 相对于GIoU 有更好的性能。总的来说,这段文字描述了通过增加GhB 模块、改变定位损失函数以及使用SAHI 策略对YOLOv5 进行改进优化后,在VOC 数据集上提高了目标检测的性能,包括AP 的提升、计算量和参数量的减少、检测速度的减少等。这些改进使得YOLOv5 在保持一定精度的同时,降低了参数量和计算量,提高了检测器的边界框定位准确性和抵抗噪音的能力,并在推理过程中通过SAHI 策略进行了优化,提高了AP 和推理速度。
3 深度学习下人行过街控制模型在实际交通信号控制中的应用
基于上文中研究结论,本节将图片识别融入交通信号控制中以提升道路安全性,通过图片信息识别分析实现基于自适应的路口交通信号变化,适应不同时段车流人流。研究分别采用基于图像学习的交通控制策略和另外两种平峰高峰常用交通控制策略作为研究对比,通过某处交通路口实地试验获得结果如图4。

图4 6 种不同混合交通模式下排队时长比较
如图4 所示,在6 种不同混合交通模式下,本文提出的人车协同深度学习模型均取得了控制优势,对于降低车辆急停和长时间等候均有明显的缓解效果,从时间分布情况看,特别在高峰时段(混合交通情况4 中)模型下的控制策略效果最为显著,其根本原因在于本算法在人车饱和状态下,通过识别和预判人车走向,最大程度减少人车冲突情况的产生,合理给予交通信号临时性的时间控制改变,通过减少控制时间的方式减少了不要的等候时间损失。
综合上述不难看出,混合交通流供需协同信号控制方案相比其他两种信号控制方案,在释放车辆方面表现更好。特别是在交通流过饱和的情况下,混合交通流供需协同信号控制方案的改善效果更为明显。相对于基于机动车-行人需求的控制方法,混合交通流供需协同信号控制方案的机动车释放量提升百分比可达到10.8%和10.4%。优化模型通过SD-YOLOv5 实时优化相位相序和配时,提高绿灯的有效利用率,尽可能释放到达交叉口的车辆。
4 总结
本文基于人工智能策略及深度学习,研究了行人过街交通信号控制器的设计与策略。提出了一种基于人工智能策略的行人过街交通信号控制器设计与策略,并在实际交通信号控制中取得了一定的应用效果。研究结论总结了混合交通流供需协同信号控制方案相比其他信号控制方案的优势,并强调了优化模型在最大限度利用时空资源和避免交叉口瘫痪方面的效果。具体研究结论如下:
①通过在人的行为模式判断中引入间隙理论,利用YOLOv5s 模型进行人车混合跟踪识别与预测的设计。详细描述了该模型的结构和优化措施,如图像增强、特征提取和预测输出等步骤。
②通过SD-YOLOv5 算法的仿真试验说明了对改进后的SD-YOLOv5 方法进行实验的条件和步骤。描述了实验结果的一些评估指标,如平均精度(AP)、计算量和参数量等,以及改进后模型在性能上的提高。
③通过深度学习下人行过街控制模型在实际交通信号控制中的应用验证了将图片识别与交通信号控制相结合的应用场景和布设。通过实地试验的结果,证明了优化模型对于降低车辆急停和等待时间的效果。
猜你喜欢
海峡姐妹(2020年8期)2020-08-25
铁道通信信号(2020年8期)2020-01-05
E动时尚·科学工程技术(2019年4期)2019-09-10
电子制作(2019年10期)2019-06-17
铁道通信信号(2019年1期)2019-01-16
铁道通信信号(2018年6期)2018-08-29
发明与创新(2016年34期)2016-08-22
西南交通大学学报(2016年3期)2016-06-15
中国工程咨询(2016年1期)2016-02-14
数学年刊A辑(中文版)(2014年1期)2014-10-30
