光照条件对城市道路骑行者视觉行为的影响
2023-12-27 08:01陆妍琳王心悦龚小林
重庆交通大学学报(自然科学版) 2023年12期
,陆妍琳,2,王心悦,龚小林
(1.南京林业大学 汽车与交通工程学院,江苏 南京210037;2.中汽研汽车检验中心(常州)有限公司,江苏 常州213161)
0 引 言
骑行行为是影响交通安全的重要因素,视觉行为为骑行者获取道路信息和指导骑行行为提供了重要支撑。低照明条件会妨碍骑行者的视线和对道路信息的获取,影响骑行者的决策。因此,研究骑行者在不同光照条件下的视觉行为和变化规律,为指导低光照条件下的骑行行为提供理论支持,具有重要意义。
关于光照条件对骑行行为的影响,现有研究大多考虑机动车驾驶员的视觉行为,主要从隧道和城市道路两个场景进行入手。针对驾驶员在隧道内驾驶的眼动变化,W. QI等[1]探究了隧道环境中受光照影响时驾驶员的眼动和生理特性变化特征;胡英奎等[2]研究表明,除了心理等因素的影响,驾驶员的瞳孔变化主要与亮度有关;闫莹等[3]分析了隧道群环境光照度对驾驶员瞳孔面积变化的影响规律,提出了隧道群路段“6小段”的划分方式;针对明暗适应现象,崔洪军等[4]分析了驾驶员的明暗适应转换次数与隧道类型和连接段之间的关系。在城市道路照明对机动车驾驶员眼动特性的影响研究中,李玮晟等[5]针对闪光灯眩光影响,提出了眩光持续时间和眼睛垂直照度的合理范围;李洪涛等[6]研究了村镇无信号公路交叉口照明和限速对驾驶员视觉搜索能力的影响,提出限速和照度的理论范围。以上研究主要针对机动车驾驶员这一主体,分析了驾驶员在不同光照条件影响下的视觉行为。
城市道路中骑行者的眼动受非机动车本身影响,在对骑行行为的研究中:马艳丽等[7]针对低照度条件在无信号交叉口处对行人与车辆冲突进行了研究;P.VANSTEENKISTE等[8]研究了低等级自行车道对骑行者的眼动影响;胡文斌等[9]分析了自行车骑行者与机动车驾驶员在城市道路上的眼动特征差异。
综上,关于照度对交通参与者的影响研究,很少考虑骑行者;在骑行行为研究中,很少考虑光照程度的影响。因此,笔者从电动自行车骑行者入手,通过眼动仪实验,对比分析骑行者在不同光照条件下的视觉特性,为骑行者在低光照条件下安全骑行提供理论支持。
1 实验方案
1.1 实验路段和时间
实验路段选择江苏省南京市龙蟠路一处直行路段,龙蟠路为双向六车道,交通量大,路段有机非分隔带和行人专用道,夜间路灯间隔距离长,有树木和道路设施遮挡且照度低。为避免不同温度对骑行者的影响,实验的时间为20211211—20220116;为了防止实验时样本量过多干扰数据采集,实验时间选取为非工作日晴天15:00—16:00(下午)、17:00—18:00(傍晚)和19:00—20:00(夜晚),傍晚指同时拥有自然光和路灯双重照明,夜晚指除路灯外没有其他照明。
1.2 实验仪器和人员
实验选用TobiiGlasses眼动仪(采样频率为50 Hz)、ErgoLAB数据分析软件。
初选42名骑行者完成实验,在实验结束后通过观察每位实验人员的眼动采样概率,筛除采样率低于70%的骑行者,最终选择30名作为实验对象。其中,男性17名,女性13名,年龄分布为[18,30]岁12人,(30,43]岁10人,(43,60]岁5人,>60岁3人,矫正视力均为5.0以上,均有较好的电动自行车骑行经验。
1.3 实验过程及数据
实验中实验对象佩戴眼动仪在实验路段持续骑行500 m,分别在3种光照条件下骑行两次,剔除采样率较低的数据,并重新进行补充实验,分析数据得到每一时刻的骑行者眼动情况,结果取两次有效实验的均值,对实验所得画面截取所需片段,获取骑行者的注视区域、热点图、注视、扫视、眨眼以及瞳孔变化等参数。
2 眼动参数分析
通过实验获取的数据,得到骑行者的注视、扫视、眨眼和瞳孔变化等眼动参数,其中注视、扫视和眨眼是骑行者持续重复的眼动行为[10],在注视行为中穿插扫视和眨眼行为。注视行为反映了兴趣和视认程度,扫视行为反映了信息的获取能力,眨眼行为反映紧张程度[11]。根据ErgoLab软件数据输出,使用描述性统计方法,得到骑行者在白天、傍晚和夜晚3种光照条件下在实验路段的眼动参数数据。
2.1 注视行为指标分析
眼动研究中注视行为的表征参数主要有注视次数、注视时间和注视视角,骑行者的注视次数代表兴趣程度,注视持续时间代表对有效信息的视认程度,注视视角代表视野范围[11]。
2.1.1 注视点分布
根据导出的骑行者注视坐标绘制骑行者在3种光照条件下的注视点分布散点如图1,可以发现骑行者在傍晚和夜晚的注视点分布较白天来说更为分散。

图1 注视点分布
2.1.2 注视行为分析
根据数据绘制骑行者在3种光照条件下的注视指标如图2,可以发现骑行者在白天时注视次数高于傍晚和晚上,在夜晚骑行者的注视时间和注视时间百分比高于傍晚,这说明受光照的影响,骑行者的单次注视时间增加。这是因为在低光照条件下,骑行者的骑行难度加大,骑行者需要集中注意观察道路情况,因此随着光照条件的减弱,注视次数下降而注视时间上升,夜晚的路灯照明条件较傍晚双重光照对骑行者的影响更大。
2.2 视负荷程度分析
眼动研究中视负荷程度的表征参数主要有眨眼行为、扫视行为和瞳孔变化。眨眼行为表示骑行者的紧张程度,扫视行为表示骑行者对周围复杂信息的获取能力,瞳孔变化一定程度上表示骑行者的疲劳程度[11]。
2.2.1 眨眼行为分析
根据数据绘制骑行者在3种光照条件下的眨眼指标如图3,可以看出骑行者在3种光照条件下的每秒钟眨眼速率和眨眼时间的排序为:白天>傍晚>夜晚,平均眨眼时间排序则相反。说明受光照影响,当骑行者处于较暗照明条件时,会减少眨眼次数、增加眨眼间隔时间,骑行者更容易产生紧张感。

图3 骑行者的眨眼指标数据对比
2.2.2 扫视行为分析
根据数据绘制骑行者在3种光照条件下的扫视指标如图4,可以看出骑行者在3种光照条件下的扫视次数、扫视时间和扫视时间百分比数据的排序为:白天<傍晚<夜晚。扫视指标的上升说明当骑行者处于较暗照明的条件下,会进行更频繁的扫视行为来获取道路信息。

图4 骑行者的扫视指标数据对比
2.2.3 瞳孔面积变化分析
骑行者在3种光照条件下的瞳孔指标如表1,可以看出骑行者在白天时瞳孔变化程度最小,夜晚的变化程度最大。说明受光照的影响,当处于较暗照明的条件下,骑行者更容易产生疲劳感。

表1 3种光照条件下骑行者瞳孔指标数据
综合扫视、眨眼和瞳孔变化数据可以发现,骑行者在更暗程度的照明条件下,更紧张也更容易产生疲劳感。为保证自身安全,夜间骑行时骑行者应尽量选择光照条件更充足的路段。
3 注视转移特性分析
3.1 注视区域划分
骑行者注视区域的划分方法有视力角划分、注视目标划分和动态聚类法等。视力角划分法较为简单,但准确度较低。注视目标划分法准确度较高,但对数据有一定要求。动态聚类划分法速度较快且准确度较高,但可能不符合实际道路情况。考虑各方法优缺点,实验采取K均值动态聚类和注视目标划分相结合的方法对道路进行划分,实验场景如图5。

图5 实验场景
选择K均值聚类算法[12],使用MATLAB软件对实验注视点坐标进行聚类分析,当K均值为5即划分为5个区域时聚类结果较好,轮廓值接近1且无负值,聚类结果如图6。

图6 注视点聚类结果及轮廓值
综合考虑实验场景的注视目标,将骑行者的注视区域划分为远处区域、前方区域、机动车区域、道路和建筑区域和行人区域,区域划分结果如图7。

图7 注视区域划分
3.2 各区域注视情况
根据注视区域划分结果,进行数据处理,得到3种光照条件下骑行者在各区域的注视次数和注视时间指标数据如表2。由表2可知:

表2 3种光照条件下骑行者各区域注视指标数据
1)3种照明条件下,骑行者的重点关注区域都是远处区域,注视时间占比分别为49.85%、51.26%、41.46%,关注远处区域可以提前观察道路情况、增加反应时间,保证自身安全。
2)随着光照条件的减弱,骑行者对前方区域的注视占比逐渐减少,对机动车区域和行人区域的注视占比逐渐增加,对道路和建筑区域的注视占比基本相等。这是因为在较暗照明的情况下,骑行者对注视点的单次注视时间增加,需要更长的时间识别道路和交通状况,为保证自身面对突发情况能做出及时的反应,会将更加关注视野的远端和更加开阔的区域,对道路状况进行全面把控。
3.3 基于马尔可夫链的注视区域一步转移概率
马尔可夫链是一组具有马尔可夫性质的离散随机变量的集合。具体地,对概率空间内以一维可数集为指数集的随机变量集合X={Xn:n>0},若随机变量的取值都在可数集内:Xn=si,si∈s,且随机变量的条件概率满足式(1):
p(Xt+1|Xt,...,X1)=p(Xt+1|Xt)
(1)
则X被称为马尔可夫链。
由于骑行者在白天、傍晚和夜晚3种不同光照条件下的眼动特性存在差异,为进一步探究骑行者在3种实验过程中的视觉差异性,采用马尔可夫链对骑行者的注视转移情况进行分析。在现有的实验场景中,通过选择实验时间对外部的交通情况进行变量控制,尽可能保证除光照条件以外的其他因素(道路条件、交通量、骑行速度等)基本处于同一水平;在骑行过程中骑行者的注视点变化只与当前的注视点相关,并不依赖于上一个注视点,因此符合马尔可夫链的定义。
使用马尔可夫链分析骑行者的一步注视转移概率,步骤如图8。

图8 转移概率统计步骤
选取实验路段骑行者的注视点位置,将注视点定位至所划分的区域,然后统计出骑行者在白天、傍晚、夜晚3种光照条件下在各个区域的转移概率如表3。
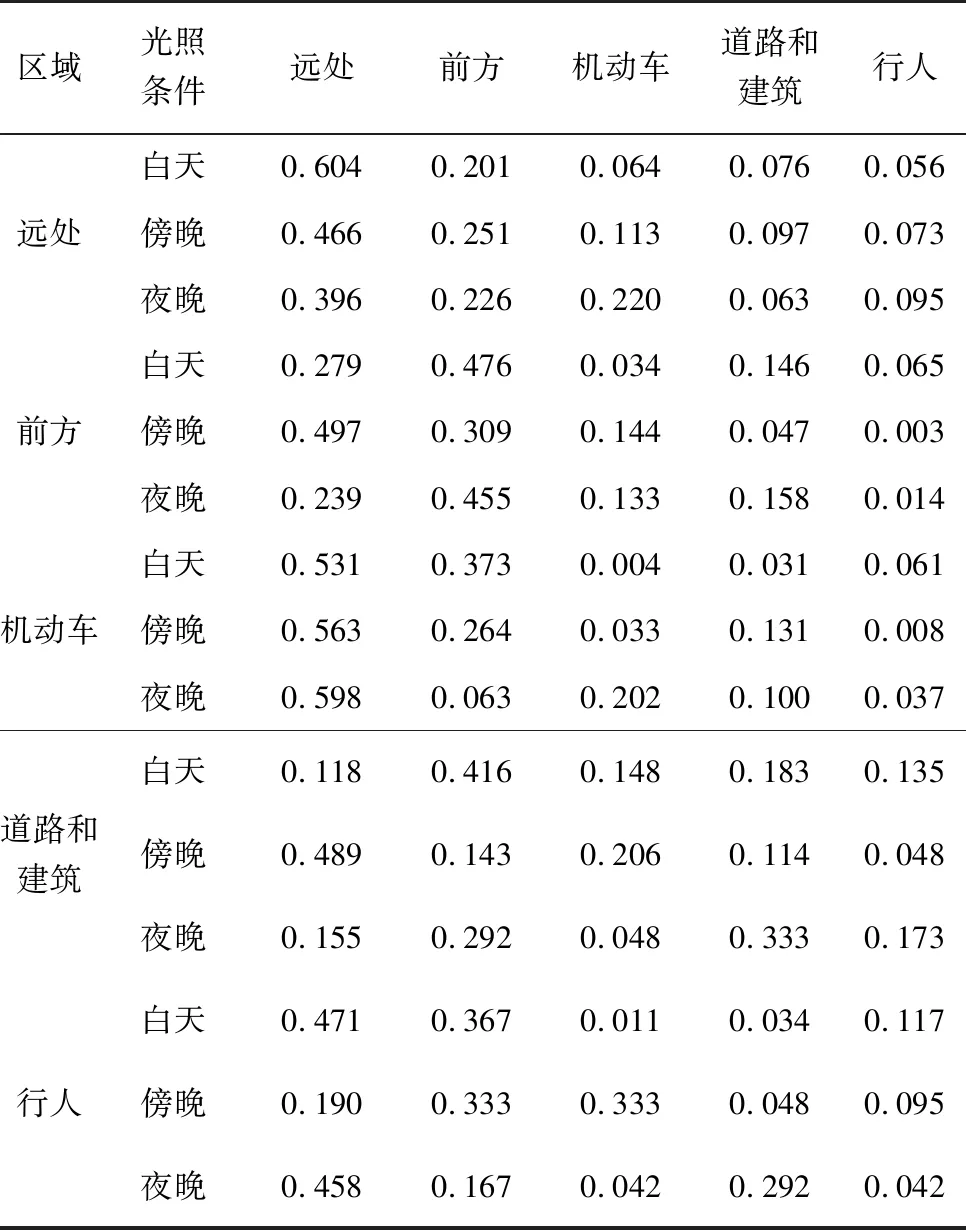
表3 骑行者注视一步转移概率
由表3可知:
1)骑行者在白天、傍晚和夜晚3种光照条件下的注视转移特性较为相似,各个区域注视转移概率最大的是远处区域,其次是前方区域,当注视区域内有车辆情况,骑行者的视线停留在远处和前方区域,可以更好地收集交通信息。
2)从白天到傍晚再到夜晚,骑行者在机动车区域、道路建筑区域和行人区域的注视转移概率逐渐增加,随着光照条件减弱,骑行者的注视范围逐渐变得分散,对视线范围内的其他区域的关注度逐渐上升。
3)骑行者在机动车区域和道路建筑区域内部的注视转移概率随光照条件的减弱呈现上升趋势,在行人区域内部的注视转移概率逐渐下降。在光照条件减弱的情况下,骑行者的视线范围会更加倾向于停留在远方和光照强烈的区域,对行人区域的注视停留概率变低。
3.4 注视平稳概率
若马尔可夫链的所有状态都具有遍历性,则在马尔可夫链状态空间E内,对于任一注视转移概率pij,都存在与之对应的概率分布πj,使其乘积的总和为1,如式(2):
(2)
则称{πj,j∈E}为马尔可夫链的平稳分布[13]。
针对骑行者建立的马尔可夫链存在稳态分布,骑行者的注视平稳概率如表4。
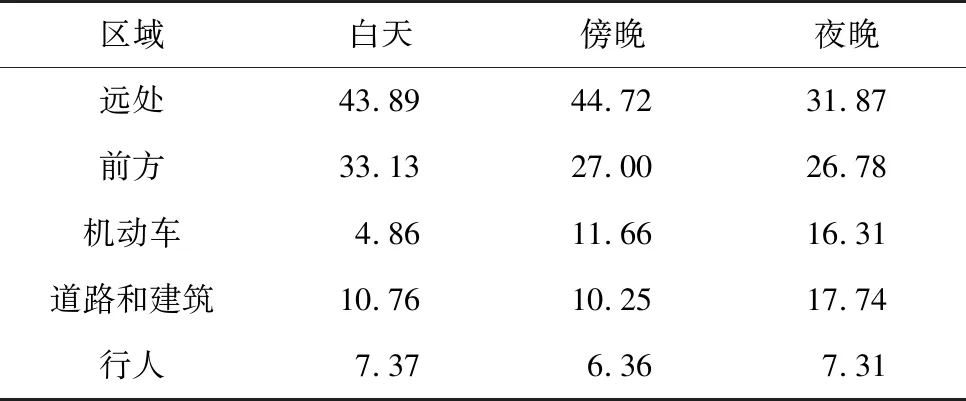
表4 骑行者注视平稳概率
可以看到,在3种光照条件下,骑行者对远处区域的注视平稳分布概率都最高,其次是骑行者的前方区域。随着光照程度降低,骑行者对远处区域的注视平稳分布概率逐渐侧重于机动车和道路建筑区域,这说明:
1)受两侧隔离带的影响,骑行者对两侧的关注度较低,更关注远处和前方区域,以便应对交通的突发情况;
2)随着光照条件的减弱,骑行者的注意力会转移,尤其是当夜晚仅有路灯照明时,骑行者在关注远处区域路况时,注视概率会因为光照不足而偏向其他区域;
3)在直行道路且两侧都有隔离带的路况下,骑行者会比较关注对自己影响更大的非机动车区域,但如果骑行者的注意力过度集中于前方和远处区域,在无隔离带的道路上骑行会减少自身的危险感知程度,从而增加事故的发生。
4 视觉变化率分析
综合3种不同光照条件中骑行者的视觉特性,分析骑行者在光照条件降低时的视觉变化情况,定义骑行者在两个变化过程中各项视觉指标的变化率Ai和Bi分别为式(3):
(3)
式中:i为视觉特性指标,i的取值范围为1~4,分别为注视时间、扫视速度、眨眼频率、视觉转移;X′,Y′,Z′分别为3种光照条件下骑行者的视觉指标值;Ai和Bi分别为骑行者从白天到傍晚和从傍晚到夜晚的视觉指标的变化率,视觉指标的变化代表光照度降低时视觉的衰退情况。
光照减弱时骑行者视觉指标变化情况如表5。
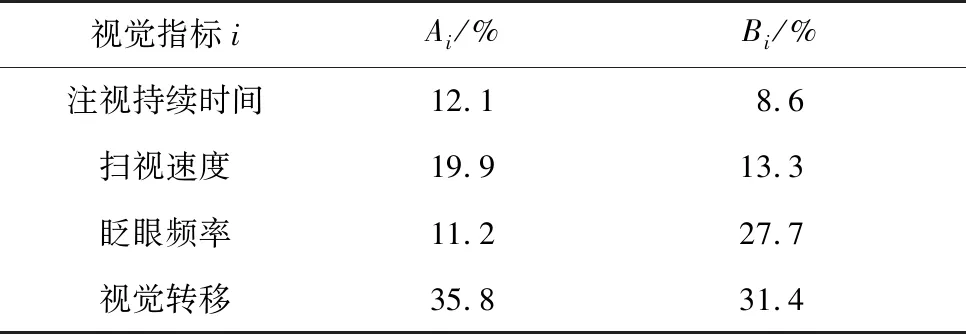
表5 光照减弱时骑行者视觉指标变化情况
根据表5可知:
1)注视持续时间增加,代表认知能力和反应能力的下降,骑行者从白天到傍晚的注视持续时间变化率高于从傍晚到晚上的注视持续时间变化率,表明骑行者从白天到傍晚的认知能力和反应能力的下降更明显。
2)扫视速度的降低,代表在固定的时间内扫视次数减少,也说明获取复杂信息的能力降低。骑行者从白天到傍晚的扫视速度变化率高于从傍晚到晚上的扫视速度变化率,表明骑行者从白天到傍晚获取危险信号的能力下降更明显。
3)眨眼频率的增加,代表紧张程度的增加。骑行者从傍晚到晚上的眨眼频率变化率高于从白天到傍晚的眨眼频率变化率,表明骑行者从傍晚到晚上的紧张程度更高。
4)视觉转移概率越大,说明对该区域的关注程度越高。骑行者从白天到傍晚的视觉转移变化率略高于从傍晚到晚上的视觉变化率,表明骑行者从白天到傍晚对各个区域的兼顾概率略高于从傍晚到晚上。
5 结 论
为分析骑行者在城市道路不同光照条件下的眼动特性,选取3种不同的光照场景,以骑行者的眼动实验分析其差异性和变化规律,得出结论如下:
1)由白天到傍晚再到夜晚,骑行者的视野范围逐渐分散,注视时间和扫视时间增加,眨眼频率减小,瞳孔直径变化范围变大。说明随着光照条件的减弱,骑行者骑行难度加大,骑行者需要集中注意、更加频繁地进行扫视行为观察道路情况,较暗的照明条件更容易使骑行者产生紧张和疲劳感。
2)骑行者在骑行的过程中,关注的重点分别是远处和前方区域,随着光照条件的减弱,骑行者的注视范围会逐渐扩散,对视线范围内的其他区域的关注度逐渐上升。根据注视转移概率可知,骑行者注视转移概率最高的是骑行的远处和前方区域,白天时远处和前方区域的同区域注视转移概率达到了0.604和0.476,而随着光照条件的减弱,骑行者的视线范围会更加倾向于停留在远方和光照条件更好一些的区域。
3)根据光照减弱条件下骑行者视觉变化率,表明骑行者从白天到傍晚的认知能力和获取危险能力的下降较傍晚到夜晚更明显;骑行者从傍晚到夜晚的紧张程度变化较白天到傍晚更高;骑行者从白天到傍晚对各个区域的兼顾概率略高于傍晚到夜晚。
猜你喜欢
智能建筑与智慧城市(2022年9期)2022-09-28
汽车实用技术(2022年7期)2022-04-20
载人航天(2021年5期)2021-11-20
兰州理工大学学报(2021年5期)2021-11-02
体育时空(2017年6期)2017-07-14
复旦学报(自然科学版)(2016年4期)2016-09-21
数学理论与应用(2016年3期)2016-05-17
外语学刊(2016年4期)2016-01-23
核科学与工程(2015年3期)2015-09-26
哈尔滨师范大学自然科学学报(2015年1期)2015-04-19