受扰直流降压变换器自适应离散滑模控制设计与实现
2023-12-18 09:44王佐,刘鹏
控制理论与应用 2023年11期
王 佐,刘 鹏
(东南大学自动化学院,江苏南京 210096;复杂工程系统测量与控制教育部重点实验室,江苏南京 210096;东南大学深圳研究院,广东深圳 518063)
1 引言
随着智能电网与可再生能源技术的不断发展,直流变换器系统作为其中电能转换的核心组成部件,已受到越来越多的关注与研究[1–2].由于其本身具有低成本、高效率与高可靠性等优点,直流变换器系统被广泛应用于各类机电系统中,如直流微电网系统[1]、伺服驱动系统[3–4]、空间系统[5]等.随着控制要求的不断提高,尤其是在复杂内、外部环境和时变干扰情况下,如何保证电压跟踪的高精度、动态响应的快速性以及强抗干扰能力已成为制约其性能的核心问题[6–7].
直流降压变换器系统的先进控制算法引起了广泛的关注.早期的研究成果主要集中在基于线性控制器的解决方案,如比例–积分–微分(proportional-integral-derivative,PID)控制等被广泛应用于高实时性、低计算复杂度的场景[8].然而,众所周知,由于多源时变干扰及参数不确定的影响,常规的线性控制器往往无法实现大、小偏差工况的兼顾,难以取得满意的控制效果[7,9].基于传统PID控制器,适应多种工况的分段PID控制方案得到了广泛地的应用.此方案通过各种工况下的覆盖测试和规律总结,制作控制参数表存储于微处理器中.在实际运行时,根据情况选取合适的参数,可得到较为满意的控制效果.后续的研究主要集中在基于模型的先进非线性控制策略方面.众多非线性解决方案被应用于变换器系统中,如反步控制[9]、自适应控制[10]、模型预测控制[11]等.这些非线性控制策略从不同角度提升了变换器系统的控制性能.但考虑到实际运行中温、湿度等外部环境、电子器件内部参数摄动及负载波动干扰等多种不利因素的影响,基于精确模型设计的非线性控制算法的性能会有一定程度的衰退.此外,因实际工程中,微处理器的计算能力有限,复杂非线性控制策略往往难以取得令人满意的控制效果[7,9].
除上述非线性控制策略外,滑模控制(sliding mode control,SMC)由于其控制结构简单、对干扰和不确定的强鲁棒性获得了广泛地研究与应用[12–14].在文献[13]中,基于线性滑模面的滑模控制器被用于解决直流降压变换器系统中的干扰抑制问题,实现了输出电压的快速跟踪和匹配干扰的有效抑制.由于传统滑模控制器采用非连续切换项,容易导致控制量的高频抖振,产生较大的输出电压纹波.干扰精确估计和精细补偿作为一种有效的缓解抖振方案被广泛采用.在文献[15]中,扩张状态观测器(extended state observer,ESO)被用来估计系统中的集总干扰,并将干扰的估计信息引入线性滑模面的设计中,实现了对于不匹配负载干扰的有效抑制.同时,控制量的抖振也得到缓解.为实现更快的电压跟踪响应速度,文献[14]中设计实现了一种基于有限时间观测器的非奇异终端滑模控制方案.结果表明,非奇异终端滑模设计可实现变换器系统对于参考电压的有限时间跟踪.高阶滑模控制方案由于其更高的跟踪精度和对抖振的抑制效果,在变换器系统中亦获得广泛的研究和应用[16–17].值得注意的是,上述滑模控制方案都是基于连续时间域来进行分析和设计,没有考虑控制器的数字化实现问题.
得益于微电子硬件设备的飞速发展,实际工程中越来越多地采用数字化微处理器.由于其采样周期的限制,基于连续时间域设计的滑模控制器在离散化后不可避免的出现性能衰退[4,18].因而,离散时间滑模控制(discrete-time SMC,DSMC)的设计和分析受到了研究人员和工程师的广泛关注.文献[19–20]针对直流降压变换器系统设计了基于干扰观测的复合离散滑模控制器,有效地消除了负载干扰对电压跟踪精度的影响.以上控制器是基于等效控制的思想设计的,在这种控制方案下,滑模控制变量在一个控制周期内被驱动到滑模面[21].基于等效控制思想得到的控制器不包含切换项,从源头上消除了抖振现象.方案要求滑模变量在一个控制周期内收敛,控制器往往无法提供如此大的控制能量,造成实际上的性能衰退[22].文献[23]中提出了一种基于到达律的离散滑模控制方案,在有效地解决等效控制中能量过大的同时,可实现直流降压变换器系统的精确控制.由于不连续切换函数的存在,控制量抖振会导致输出电压高频纹波.为解决抖振问题,一种常用的思路是采用饱和函数来代替控制器中的切换项,控制量连续性的获得往往是以牺牲抗干扰性能为代价[24].另一种缓解抖振的思路是设计基于自适应到达律的控制方案[25–28].这些方案中,会根据滑模变量sk距离准滑模域的距离设计动态增益函数.基于离散干扰观测器的复合滑模控制器也为缓解控制量抖振提供有益的解决思路.目前离散的干扰观测结果最常见的是采用延迟估计的设计方案[18].文献[19,21]中将延迟估计方案分别应用于变换器和伺服驱动系统.基于延迟估计的离散干扰观测器结构简单,在估计慢时变类型的干扰时,通常能取得较高的估计精度.对于快时变类型的干扰往往很难取得满意的效果.除此之外,将连续时间观测器进行离散化设计也可得到离散时间观测器,如离散ESO[29]、离散比例–积分(proportional-integral,PI)观测器[30]、离散滑模观测器[31]等.为进一步提升干扰估计精度,在文献[32]中基于递归思路设计了一种新型的离散观测器.后续的研究成果,主要集中在如何兼顾到达律和等效控制两种方案的优势.在文献[22,32]中提出了基于非光滑思想设计的无抖振滑模控制方案.在此类控制器中,采用含分数幂的连续项来取代常用的切换项,从而消除了控制量抖振对于变换器系统输出电压精度的不利影响.但由于控制器设计中引入了分数幂运算,计算较为复杂,对于控制器硬件的计算能力具有较高的要求.
受电力电子变换器系统高精度控制迫切需求的驱动,本文提出了一种基于新型干扰观测器的自适应离散滑模控制方案.首先,本文设计实现了离散时间干扰观测器,实现对于集总干扰的精确估计.结合干扰的估计信息,可实现集总干扰的及时补偿.然后,论文设计了一种新型自适应到达律,可实现控制器切换增益的自适应调节,有效缓解控制量的抖振现象.通过严格的理论分析表明,本文所研究的算法可同时保持较高的电压跟踪精度和较强的抗干扰能力.论文主要创新点总结如下: 1)设计了一种新型离散时间干扰观测器,并将干扰的二阶差分信息引入控制器的设计,有效提高电压跟踪精度;2)提出了一种自适应动态增益策略,解决切换增益选取过于保守的问题,缓解控制器抖振;3)提出的复合控制器数字化实现难度低,具备较强的抗干扰能力和较高电压跟踪精度.针对所研究的复合自适应离散滑模控制器,本文在基于dSPACE实时控制器的变换器测试平台上进行了测试验证.实验结果表明,即使在不确定性和多源干扰等不利因素的影响下,本文所提出的研究方案仍具有较强的鲁棒性和较高的精度.
2 直流降压变换器的建模与分析
在图1 中展示了一类典型的基于脉冲宽度调制(pulse width modulation,PWM)的直流降压变换器系统拓扑模型,其中:L为电路电感,C是电路电容,R是变换器负载电阻,Vin是输入电压.在实际电路运行过程中,由于受到工作环境、温湿度、自身器件参数摄动等多种不利因素的影响,系统中存在多源时变干扰.这些干扰因素直接影响了电压跟踪精度.

图1 直流降压变换器系统电路框图(导通状态: 线条1;关断状态: 线条2)Fig.1 The circuit diagram of a DC-DC buck converter(ON case: Line 1;OFF case: Line 2)
假设在任意开关周期内电压及电流信号缓慢变化,综合考虑开通及关断状态,可得直流降压变换器系统的状态空间平均模型为
其中:vo为输出电容C两端的电压值;iL为通过滤波电感L的电流值;µ∈[0,1]为系统占空比控制信号,并将与三角波载波信号比较产生开关管的PWM驱动信号.
考虑到时变干扰的影响,若令变换器系统电压参考值为常值vr,定义电压跟踪误差为x1=vo-vr,系统另一状态为x2==-,进而变换器系统(1)中的动态模型中可改写为
易得如下形式的状态空间模型:
即直流变换器系统满足所谓的匹配条件.当考虑系统控制量通过零阶保持器(zero-order hold,ZOH)进行数字化实现时,即对于任意的时间t∈[kTs,(k+1)Ts]时,有u(t)=u(kTs),其中Ts为系统采样时间.根据线性定常系统的离散化公式,连续系统(3)可变为如下的离散形式:
本文的研究目标就是通过设计基于观测器的自适应离散滑模控制器,实现多源时变干扰情况下,变换器系统仍可实现对于参考电压的精确跟踪.
3 复合控制器设计
复合自适应滑模控制器的设计主要分为两个部分:一是新型离散观测器的设计,二是基于干扰估计信息,设计得到最终的离散滑模控制器.
假设1系统干扰满足如下条件:
3.1 离散时间干扰观测器设计
为了精确估计系统(4)中集总干扰dk,设计如下离散时间干扰观测器:
其中δk+1=dk+1-2dk+dk-1.
由于干扰观测器增益矩阵Λ=diag{λ1,λ2},|λi|<1,i=1,2,可得
注2根据干扰估计误差的特性,δk,i的收敛域精度为O(),若选取合适的观测器参数|λi|<1,i=1,2,根据以上分析可知,干扰观测器跟踪精度亦可达到相同的O()级别,且跟踪误差收敛的上界高度依赖观测器参数λi,i=1,2的选取.
3.2 自适应离散滑模控制器设计
为设计离散滑模控制律,首先应选取和设计一个离散滑模面,其具体的形式为
其中Cs=[1c1]为待设计的滑模面控制参数,且满足CsΓ≠0.
为简化表达,令ξk=Cs(dk-2dk-1+dk-2).由于c1为常数,可得ξk的精度级别同样为O().根据假设1中系统干扰的二阶差分是有界的,易得存在一个正实数ξ∗使得|ξk|≤ξ∗.
为进一步缓解离散滑模控制器的抖振问题,本文设计了一种新型的自适应到达律,具体设计为
其中参数选取范围应满足如下关系:0<α<1,φ(k)=γ+(1-γ)(|sk|+1)-l,0<γ<1,l>0,且σ>ξ∗.
若基于上述自适应到达律(10),同时结合系统模型(4)和滑模面(9),离散滑模控制器应设计为
值得注意的是,上述控制器中,由于dk-1和dk-2的信息无法直接获得和使用,因而是不可实现的.本文设计的离散干扰观测器(5)可提供估计值信息,用来取代上述未知项.最终,直流降压变换器系统的复合自适应离散滑模控制器可设计为
注4本文利用干扰估计的二阶差分信息是为获得滑模变量更高的控制精度.值得注意的是,当干扰信息中包含大量高频噪声时,干扰二阶差分可能会存在放大噪声的副作用,应采用相应的低通滤波器滤波后再进行差分处理.
4 闭环系统稳定性分析
定理1针对直流降压变换器系统(4),采样时间为Ts,基于本文所研究的离散滑模控制器(12),干扰观测器设计如(5),如果满足假设1中条件,可得滑模变量sk经过有限N个控制周期后,最终收敛到范围为Ω的准滑模域(quasi sliding mode domain,QSMD)内,且一旦进入收敛域内将始终保持在域内,其中,⎿n∗」为小于n∗的最大整数.
证此定理的证明可分为以下步骤完成.
步骤2其次,需证明滑模变量sk从任意初始状态收敛到准滑模域内.针对直流降压变换器系统,取Lyapunov函数为Vk=.结合式(9)可得
具体分为以下两种情况:
1) 当sk>∆>0时,可得
因sk>∆>0,0<α<1,易得sk+1-sk<0.
因此,在此情况下,即当sk>∆>0时,可得∆Vk=(sk+1-sk)(sk+1+sk)<0.
2) 当sk<-∆<0时,可得
此时,可得∆Vk=(sk+1-sk)(sk+1+sk)<0.
综合上述两种情况,可得∆Vk<0,即只要滑模变量sk在准滑模域Ω外,sk+1将持续地向着准滑模域内收敛.
步骤3当滑模变量sk进入准滑模域内,sk+1将保持在准滑模区域内.
相似地,也可分为以下两种情况进行分析:
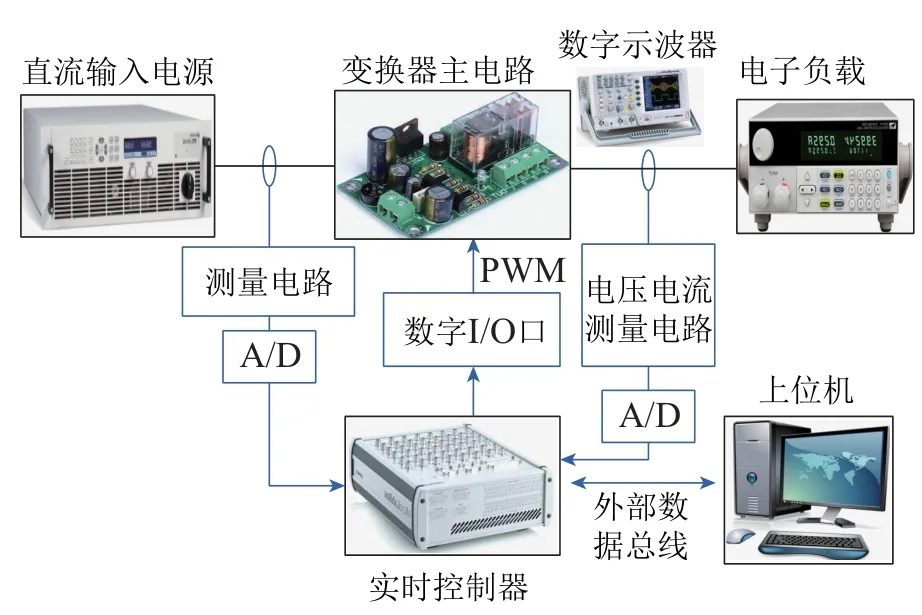
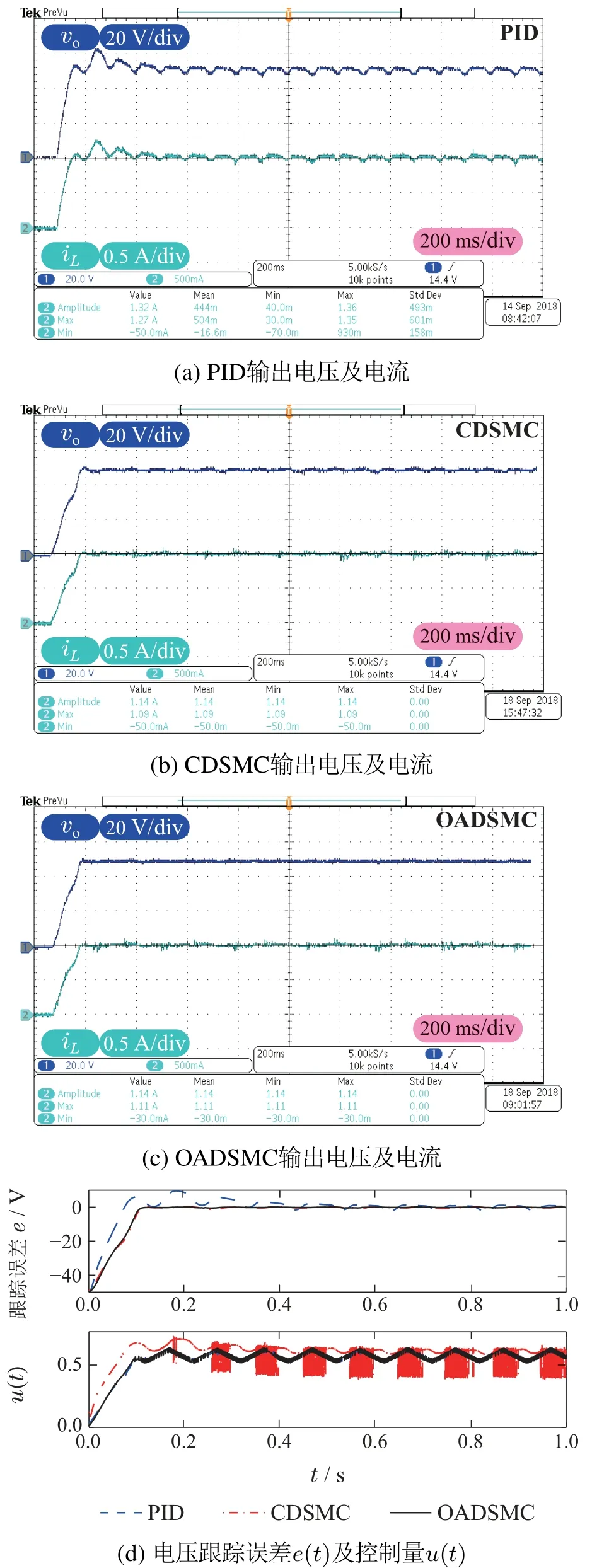
此种情况下,仍然可得sk 综上,对任意的sk ∈Ω,有sk+1∈Ω成立,即只要滑动变量sk进入QSMD内,将一直处于此区域内. 以上分析了滑模变量sk的收敛过程,可发现当sk收敛进入准滑模域内时,此时φk→1,可得此时可以得到∆≈σ+ξ∗.由于ξ∗具有O()的精度,通过选择切换增益σ和ξ∗相同的精度级别,最终使得QSMD达到O()的精度. 步骤4最后,需分析在所设计的自适应离散滑模控制器作用下,系统第1次进入准滑模域的步数不多于N=⎿n∗」+1,其中:⎿n∗」表示小于n∗的最大整数. 同样,可分为以下两种情况分析滑模变量动态: 1) 当sk>0时,由式(10)可得 以此类推,可得sn表示为 令sn=0,此时可解出 2) 当sk<0时,由式(10)可得 因此,在离散自适应滑模控制器作用下,系统从初始状态到准滑模域,最多需要N个控制周期,其中 证毕. 为验证所提出方案的有效性,本节基于实时控制器的实验平台进行性能测试.首先,直流降压变换器系统的电路参数如表1所示. 表1 直流降压变换器系统参数Table 1 System parameter configurations 本文相应地实现了PID和基于到达律的传统固定增益离散滑模控制器(conventional DSMC,CDSMC).为了验证所研究的基于观测器自适应离散滑模控制器(observer based adaptive DSMC,OADSMC)的电压跟踪性能并考虑实际应用需求,对3种控制器的控制参数进行仔细选取,以保证比较的公平性.通过选取合适的控制器和观测器参数,电压跟踪性能方面实现了控制能量和干扰抑制性能之间的平衡. 实验平台如图2所示,其主要部分包括: 主电路、实时控制器、可编程直流电压、霍尔电流/电压传感器、数字示波器等.系统采样周期选取为Ts=100µs,PWM驱动频率为20 kHz.变换器输出波形由示波器和上位机软件ControlDesk采集. 图2 实验测试原型图Fig.2 Experimental test setup prototype 测试工况1时变负载干扰情况下的性能验证. 直流变换器系统中负载电阻值按以下设置发生突变,用来模拟实际系统中的负载突变,即 如图3 所示,输出电压vo、电感电流iL、占空比u(t)及电压跟踪误差e(t)的响应曲线.从输出电压响应曲线的比较中,可发现处理负载突变干扰时,本文所提出的方法取得了最好的控制效果.其电压瞬时突变和电压恢复时间相较于其他两种控制方案,性能有明显提升.由于其干扰抑制效果迅速,电压快速恢复到参考值.在实际实验过程中由于示波器纪录实验结果,很难保证3种方法同时进行负载电阻的突变.为便于比较,在图3(d)所示的电压跟踪误差曲线中,本文将电阻变化时刻进行同步.此外,从图3(d)所示的占空比曲线对比中可发现,本文所研究的复合控制方案有效地削弱了抖振的影响. 图3 负载电阻时变情况下的响应波形Fig.3 Response curves with load variations 测试工况2时变输入电压情况下的性能验证. 为验证极端输入电压波动下,本文所提方案作用下变换器系统的实际控制性能,此工况下,在输入电压端叠加一个周期为120 ms,幅值为10 V的锯齿波来模拟实际干扰.此时,3种不同控制器作用下,降压变换器系统的输出响应波形如图4所示. 图4 输入电压时变情况下的响应波形Fig.4 Response curves with supplied voltage fluctuations 为消除时变干扰影响,尽管在PID控制器中加入较大的积分作用,仍不可避免地出现电压大幅波动.CDSMC采用切换作用对干扰进行压制,但其取得的效果较为有限.还因引入过大切换增益,加剧控制量的抖振.即使在输入变压波动严重的情况下,本文所提出控制方案仍可实现输出电压性能在动态速度和静态精度间的兼顾,有效抑制了时变输入电压干扰对于变换器电压跟踪性能的影响. 为定量地评估系统控制性能,选取如下性能指标,其中包括稳定时间(stable time,ST)(ms),最大电压上升/跌落(maximum voltage raise/drop,MVR/MVD)(V)和恢复时间(recovery time,RT)(ms).变换器系统相应的电压性能指标如下表2所列.可发现,在处理阶跃干扰(负载突变)时,3种控制方案均可实现电压的无偏差跟踪.然而,在抑制时变电压干扰时,PID控制器已明显无法取得满意的电压跟踪精度.CDSMC控制方案,尽管对于时变输入电压干扰有一定的抑制效果,从其电压跟踪误差曲线上仍有波动,且从其控制量响应图中可观察到明显的抖振现象.与以上两种控制方案相比,本文所研究的控制策略在所有测试工况下的性能指标都取得了改善.电压跟踪精度、恢复时间以及控制量抖振方面的性能都获得了明显提升. 表2 不同测试工况下的变换器性能指标Table 2 Performance indices with testing cases 本文研究了直流降压变换器系统的自适应离散滑模控制问题.为实现对集总干扰的精确估计,本文首先设计了一种新型离散观测器.在此基础上,将干扰估计的二阶差分信息引入滑模控制器的设计中,有效消除时变干扰对于系统性能的影响.为进一步削弱控制量抖振,本文设计实现了一种基于自适应趋近律的离散滑模控制器.通过不同测试工况下实验结果验证了所提方案的有效性.结果表明,本文所研究的控制方案可较好兼顾电压动态响应和干扰抑制能力.与此同时,控制量抖振问题也得到有效缓解.鉴于所提方案的优越性能,笔者下一步的研究方向将致力于将所研究方案进一步推广到其他类型的电力电子变换器系统.5 性能验证



6 结论
猜你喜欢
中国惯性技术学报(2019年6期)2019-03-04
测控技术(2018年4期)2018-11-25
测控技术(2018年3期)2018-11-25
智富时代(2017年4期)2017-04-27
智富时代(2017年4期)2017-04-27
广东石油化工学院学报(2016年6期)2016-05-17
铁道科学与工程学报(2015年5期)2015-12-24
深空探测学报(2015年3期)2015-12-07
中国铁道科学(2015年4期)2015-06-21
电测与仪表(2015年19期)2015-04-09