
面向速度自适应控制的AGV路径跟踪方法研究
2023-12-16 08:49何杰明戴国志
机械设计与制造工程 2023年11期
何杰明,戴国志,余 璇
(广东烟草惠州市有限责任公司,广东 惠州 516003)
近年来,随着智能仓储的兴起,叉车无人化、智能化改造成为了发展趋势和研究热点[1- 2]。叉车自动导向车(automated guided vehicle,AGV)作为现代物流先进智能装备的典型代表之一,能够较好地解决仓储环境中物料流量大、运送环节多、生产过程自动化/柔性化程度需求高等难题[3]。当前,在叉车AGV技术研究中,路径跟踪控制一直以来都是研究的重点和关键。现有的路径跟踪控制方法虽然在常规环境下具有较好的跟踪效果,但针对具有窄道、弯道等特殊场景的复杂仓储环境,其路径跟踪效果并不理想,并且叉车AGV在上述场景中的控制稳定性和精度优化程度也相对不足[4]。
AGV路径跟踪要求AGV在规定时间到达某一预设好的参考路径点,常见的路径跟踪方法有纯跟踪算法[5]、斯坦利算法[6]、线性二次型控制器(linear quadratic regulator,LQR)算法[7]等。其中,纯跟踪算法是基于几何的跟踪方法,通过调整叉车AGV驱动轮转角,使叉车AGV质心沿着经过目标点的圆弧行驶,达到跟踪期望路径的目的。冀同涛等[8]针对纯跟踪算法在非固定曲率下路径跟踪误差较大的问题,提出了一种基于前馈和反馈相结合的路径跟踪算法,在改善路径跟踪效果的同时,保证了车辆的稳定性。陈龙等[9]提出了一种利用模糊控制方法改进的纯跟踪模型,实现了纯跟踪模型前视距离的动态调整,以适应复杂的泊车路径。斯坦利算法是一种基于横向跟踪误差的非线性反馈函数,能实现横向跟踪误差指数收敛于零,并根据叉车AGV位姿与期望路径的几何位置关系,获得叉车方向盘转角控制量。王亚平[10]提出了一种基于斯坦利控制理论的自适应横向控制系统,该控制系统可实现对不同车速与不同曲率轨迹的跟踪。靳欣宇等[11]在斯坦利转向几何预瞄模型的基础上,提出了一种自适应的最优预瞄时间改进算法,实现了无人车在复杂开放道路上的无人驾驶。LQR算法的控制对象是以状态空间形式给出的线性系统,目标函数为对象状态和控制输入的二次型函数,基于LQR算法可得到状态线性反馈的最优控制规律,易于构成闭环最优控制。刘晓东[12]针对LQR算法参数确定困难的问题,引入了同步扰动随机逼近(simultaneous perturbation stochastic approximation,SPSA)算法对LQR参数进行寻优,并设计了基于SPSA-LQR的横向控制器,改善了路径跟踪性能和能量消耗。
由上述文献可知,纯跟踪算法在具有跟踪误差和非连续路径的场景中,抗干扰能力较强,但对速度要求较高的场合,其跟踪精度较差;斯坦利算法在中低速或路径曲率连续的场景中,其路径跟踪平衡性表现较好,但并没有考虑前视距离,时常会发生转向过度的情况;而LQR算法虽然具有优异的闭环最优控制性能,但是其参数调节复杂,不仅需要AGV的模型参数,而且还要调节LQR目标函数以获得较好的跟踪效果,同时对外界抗干扰效果的鲁棒性较差。综上所述,为解决当前仓储环境下叉车AGV弯道路径跟踪控制精度不足、抗干扰能力弱等问题,本文结合叉车AGV的运动特点,考虑融合纯跟踪算法和斯坦利算法的优点,选用PID速度控制器,提出了一种新的面向速度自适应控制的AGV路径跟踪算法,以改善叉车AGV路径跟踪效果。
1 速度自适应控制算法描述
PID是一种闭环控制算法,包括比例(proportional)、积分(integral)、微分(derivative)3种控制方法。通过这3种方法的组合可有效纠正被控制对象的偏差,使其达到一个稳定的状态。
纯跟踪算法基于几何关系和阿克曼转向定理计算叉车AGV驱动轮的转角,在具有跟踪误差和非连续路径的场景中抗干扰能力强,低速时跟踪精度良好,但在前视距离较大时,会发生转向不足、转向回调速度慢、转弯内切等现象,且在高速时跟踪精度会变差。纯跟踪算法模型图如图1所示,由其计算出的驱动轮转角δ1为:

图1 纯跟踪算法模型图
(1)
式中:L为叉车AGV支撑轮与驱动轮之间的轴距,R为给定转角下支撑轮遵循的圆半径,k为道路曲率,ld为前视距离,α为预瞄点与叉车AGV前进方向的夹角。
斯坦利算法的核心思想是利用驱动轮中心的路径跟踪偏差量对方向盘控制量进行计算,在中低速或路径曲率连续时效果较好,但时常会发生转向过度的情况。斯坦利算法模型图如图2所示,由其计算出的驱动轮转角δ2为:

图2 斯坦利算法模型图
(2)
式中:δφ为航向误差引起的转角,在不考虑横向误差时,δφ=φe,φe为叉车AGV航向与最近路径点切线方向之间的夹角;δe为横向误差引起的转角;p为增益系数;e为叉车AGV当前姿态与目标点之间的横向误差;v为当前瞬时车速。
研究表明,在纯跟踪算法中加入斯坦利算法,可以很好地弥补单纯使用纯跟踪算法导致的叉车AGV转向不足、驱动轮转向回调速度慢、在高速阶段路径跟踪精度不高等问题。因此本文将两种算法相结合,设计了一种面向速度自适应的AGV路径跟踪算法,改进后的算法可根据路径曲率自主设定叉车AGV运行速度,同时还可根据路径曲率自动切换比例因子,合理选取前视距离,精准计算驱动轮转角,使叉车AGV既能在货架密集、弯道集中、车速低的情况下实现精确跟踪,又能在货架疏散的直线路段、车速较高的情况下实现准确路径跟随。融合两种算法模型后形成的叉车AGV驱动轮转角δ计算公式如下:
δ=k1δ1+k2δ2
(3)
式中:k1和k2为比例因子,需根据路径曲率来确定,且满足k1+k2=1,若路径曲率为0,即跟踪路径为直线时,k1取0.50~0.80;若路径曲率不为0,即跟踪路径为曲线时,k1取0.30~0.50。在本文中,直线路段选取k1=0.75,k2=0.25;曲线路径选取k1=0.50,k2=0.50。
最终设计的叉车AGV速度自适应控制算法工作流程如图3所示。
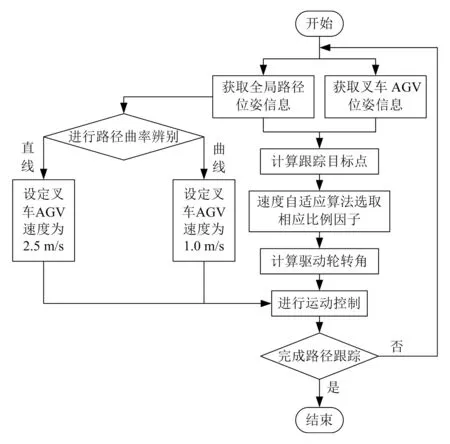
图3 叉车AGV速度自适应控制算法工作流程
2 仿真结果及分析
本文在MATLAB环境下对叉车AGV进行路径跟踪仿真实验,模拟叉车AGV的实时位姿,计算叉车AGV的驱动轮转角,并进行运动控制。其中,驱动轮转角δ与车速v为模型的输入量,叉车AGV位置信息及航向信息为模型的输出量。
1)倾斜直线跟踪仿真实验。
给定期望路径为倾斜直线,直线方程为y=2x+2,x∈[0,30],目标终点位姿为(30, 62, 1.11),叉车AGV空载目标速度为2.5 m/s,初速度为0 m/s,初始位姿为(0, 1, 0),驱动轮初始转向角为1.25 rad,仿真结果如图4所示。

图4 叉车AGV倾斜直线跟踪效果及其驱动轮转角和航向角
从图4可以看出,叉车AGV从初始位姿向x轴方向移动1 m后可跟踪到期望路径,响应速度较快。驱动轮转角调整至最大角度后逐步收敛至0 rad,航向角随转角变化快速收敛至期望航向角。整体上看,叉车AGV跟踪直线误差逐渐收敛,无超调,跟踪效果较好。
2)圆周轨迹跟踪实验。
给定期望轨迹为圆周轨迹,圆周方程为(x-7)2+(y-13)2=196,x∈R。叉车AGV初速度为0 m/s,目标速度为1.0 m/s,初始位姿为(-20, 25, 0),驱动轮初始转角为-1.00 rad,仿真结果如图5所示。

图5 叉车AGV圆周曲线跟踪效果及其驱动轮转角和航向角
由图5可知,叉车AGV驱动轮首先需调整一个较大的角度以快速跟上期望路径,随后稳定运行,以较快的响应速度将转角逐步收敛至0 rad。总体来看,改进后的速度自适应控制算法对圆周轨迹跟踪效果较好,符合叉车AGV圆周轨迹跟踪要求。
3)本文算法与纯跟踪算法直线路径跟踪对比。
设给定的直线路径方程为y=5,x∈R,目标终点位姿为(50,5,0)。设定叉车AGV目标速度为2.5 m/s,初速度为0 m/s,初始位姿为(0, 1, 0),仿真结果如图6和图7所示。

图6 直线路段路径跟踪结果对比

图7 直线路段驱动轮转角对比
由图6和图7可以看出,纯跟踪算法超调量较大,响应速度慢且达到稳定状态耗时较长;而本文提出的速度自适应路径跟踪算法,响应速度快且达到稳定状态耗时短,跟踪误差小,驱动轮转角大,转向能力强,且对驱动轮回调速度快,收敛速度快,明显优于纯跟踪算法。
4)本文算法与纯跟踪算法曲线路径跟踪对比。
设给定的曲线路径为类正弦函数曲线,曲线方程为y=sin(x/5)×x/2,x∈[0,45],叉车AGV目标速度为1.0 m/s,初速度为0 m/s,初始位姿为(0,3,0),仿真结果如图8和图9所示。

图8 弯曲路段路径跟踪结果对比

图9 弯曲路段驱动轮转角对比
由图8和图9可知,本文所提算法可以更快、更准确地跟踪到期望路径,路径跟踪无偏差,在曲率变化明显的地方,驱动轮转角更大且收敛速度更快;而纯跟踪算法在曲率变化明显的地方有超调,路径跟踪存在偏差。因此在曲线路径跟踪方面,本文所提算法也明显优于纯跟踪算法。
3 结束语
本文以纯跟踪算法和斯坦利算法为基础,选用PID速度控制器,提出了一种面向速度自适应控制的AGV路径跟踪算法。该算法通过跟踪路径曲率确定叉车AGV车速,合理选择比例因子,得到最终的驱动轮转角控制量。仿真结果表明,该算法弥补了纯跟踪算法转向不足和高速阶段跟踪精度不精确等问题,可有效提高仓储环境下叉车AGV的路径跟踪精度,为大型无人智能仓储的流畅运转提供了技术支撑。
猜你喜欢
乐山师范学院学报(2023年9期)2023-11-29
中国储运(2022年6期)2022-06-18
汽车实用技术(2022年5期)2022-04-02
汽车实用技术(2022年5期)2022-04-02
中国特种设备安全(2021年12期)2021-04-26
中国新技术新产品(2020年4期)2020-05-05
民间故事选刊·下(2017年7期)2017-07-04
科技创新导报(2016年27期)2017-03-14
广州大学学报(自然科学版)(2016年2期)2017-01-15
中国储运(2016年8期)2016-09-02
