一种基于多波束天线增益差的单GEO卫星干扰源定位方法
2023-12-15 09:28徐文轩赵来定王召文李佳宸张更新谢继东
无线电通信技术 2023年6期
徐文轩,赵来定,王召文,李佳宸,张更新,谢继东
(1.南京邮电大学 宽带无线通信与传感器网络技术重点实验室, 江苏 南京 210003;2.南京邮电大学 “电信与网络”国家工程研究中心,江苏 南京 210003;3.南京邮电大学 贝尔英才学院,江苏 南京 210003;4.南京邮电大学 电信与信息工程学院,江苏 南京 210003)
0 引言
卫星干扰源定位技术按其使用的卫星数量,一般分为单星定位、双星定位、多星定位;按定位所使用的处理平台不同,分为卫星端或地面端进行处理[1-8]。
双星或多星GE0卫星干扰源定位通常需要波束主瓣对准主星,而波束旁瓣等指向其他卫星,以此联立方程。需要几颗卫星具备经度不能差太大、相同的工作频段与极化方式、共同的波束覆盖区等苛刻条件。基于无人机辅助单GE0卫星干扰源定位,利用无人机代替了双星或多星定位中的邻星以此获得了较高精度的时差估计,同时参考站的设立消除了星历误差,可以精确地确定干扰源位置,但一般需要在粗略定位的基础上进行,代价较大[9-10]。
基于功率波动的单GE0卫星干扰源定位技术通过对比干扰信号与已知参考信号的功率波动趋势,结合匹配度与距离的对应关系,分别以多个参考站为圆心、以匹配度对应的距离为半径画圆,可以实现干扰源的定位,但需要建设多座卫星信号发射站。
本文根据星载多波束天线的频分复用原理,提出利用测量3个或以上同频波束的信号强度来进行单GEO卫星干扰源定位,此方法是根据干扰信号在各个波束中会获得不同增益的特性,以此来构建未知数为干扰源的定位方程组。该方法只需单颗卫星而且信号只需卫星透明下行转发即可,无需星上增加处理设备,参数测量限制少。该定位方法亦适用于非GEO卫星。
本文还仿真分析了增益测量误差、波束指向误差、地面高程误差对定位精度的影响,提出了一些减小误差的方法。
1 单星多波束天线干扰源入射方向的解算
不同的卫星多波束天线,天线增益覆盖图也不同。GEO卫星常采用大型展开式的多波束天线,此类型的天线增益较高,因此同频复用的邻近波束之间往往会出现较大的增益重叠区,如图1所示。干扰信号上行发射到卫星天线时,主受干扰波束及与干扰源较近的同频波束都能接收到信号。同时,若干扰源与波束的相对位置发生改变时,各波束测得的信号强度也会变化。本干扰源定位基本原理是通过干扰源入射到卫星多波束天线不同的波束,获得不同的增益,再下行转发至卫星中心站,由中心站测量得到不同的功率大小,从而推算得到干扰源的位置。

图1 多波束定向原理图Fig.1 Schematic diagram of multi-beam orientation
多波束定向原理图如图1所示,地球坐标系OeXeYeZe也称地心坐标系,是以地心为原点,固定在地球上的一个坐标系。Ze轴定义为地球自转轴(与Zi轴重合),XeOeYe轴在赤道平面内,且满足右手正交,Xe轴指向本初子午线,Ye轴指向东经90°方向。
如图1所示,设干扰源天线所在的位置经纬度分别为φesa、ηesa,卫星经纬度分别为φsat、ηsat。波束k中心所指向的位置经纬度分别为φk、ηk,k=1,2,…,∞。
将地球模型定义为椭圆,长半轴为a=6 378 137 m,短半轴为b=6 356 752.314 m,偏心率e1及纬度为η时地球卯酉面曲率半径R为[10]:
(1)
(2)
从地球地心指向卫星在地球坐标系的矢量为rsat_cen,距离为rsat,则存在下列矢量关系[11]:
(3)
从地球地心指向干扰源天线中心的矢量为resa_cen,设干扰源天线中心离海平面的高度为hant,地球海平面与地心距离为resa,按式(2)计算得:
(4)
(5)
从地球地心指向波束中心k的矢量为rk_cen,距离为rk,k=1,2,…,∞,则:
(6)
(7)
设卫星在OeXeYeZe坐标系下位置坐标为S,则S=[xsatysatzsat]T。同理,k点波束中心在OeXeYeZe坐标系下的位置坐标K=[xkykzk]T,干扰源中心在OeXeYeZe坐标系下的位置坐标I=[xesayesazesa]T。k波束中心到卫星的指向SK与干扰源到卫星的指向SI的夹角记为θk,则:
(8)
假设点波束中心增益为G0,根据文献[13-14]得到辐射源获得波束的增益G可以近似表示为:
(9)
式中:u=2.071 23sinθk/sin(θ3 dB),J1和J3分别为第一类的1阶和3阶贝塞尔函数[15-16],波束中心增益G0=π2D2η/λ2,D、η、λ分别是卫星天线口径、天线效率和辐射信号的波长。θ3 dB为半功率波束宽度,则:
θ3 dB=70λ/D。
(10)
这里设定f=2 GHz,由此计算出辐射信号波长为λ=c/f=0.15 m。当采用天线的电口径等效为D=12.5 m、效率为η=0.5的天线时,通过计算可得G0=45.35 dB。
由式(9)可知,天线增益大小与信号入射方向与点波束中心指向夹角有关,天线增益方向图如图2所示。

图2 天线增益方向图Fig.2 Antenna gain pattern
设k波束中心到卫星的指向SK偏离Xe方向角度为αk,偏离Ye轴方向角度为βk。当αk=0°、βk=0°时,画出k波束天线增益空间三维图如图3所示。当αk=3°、βk=2°时,画出k波束天线增益空间三维图如图4所示。
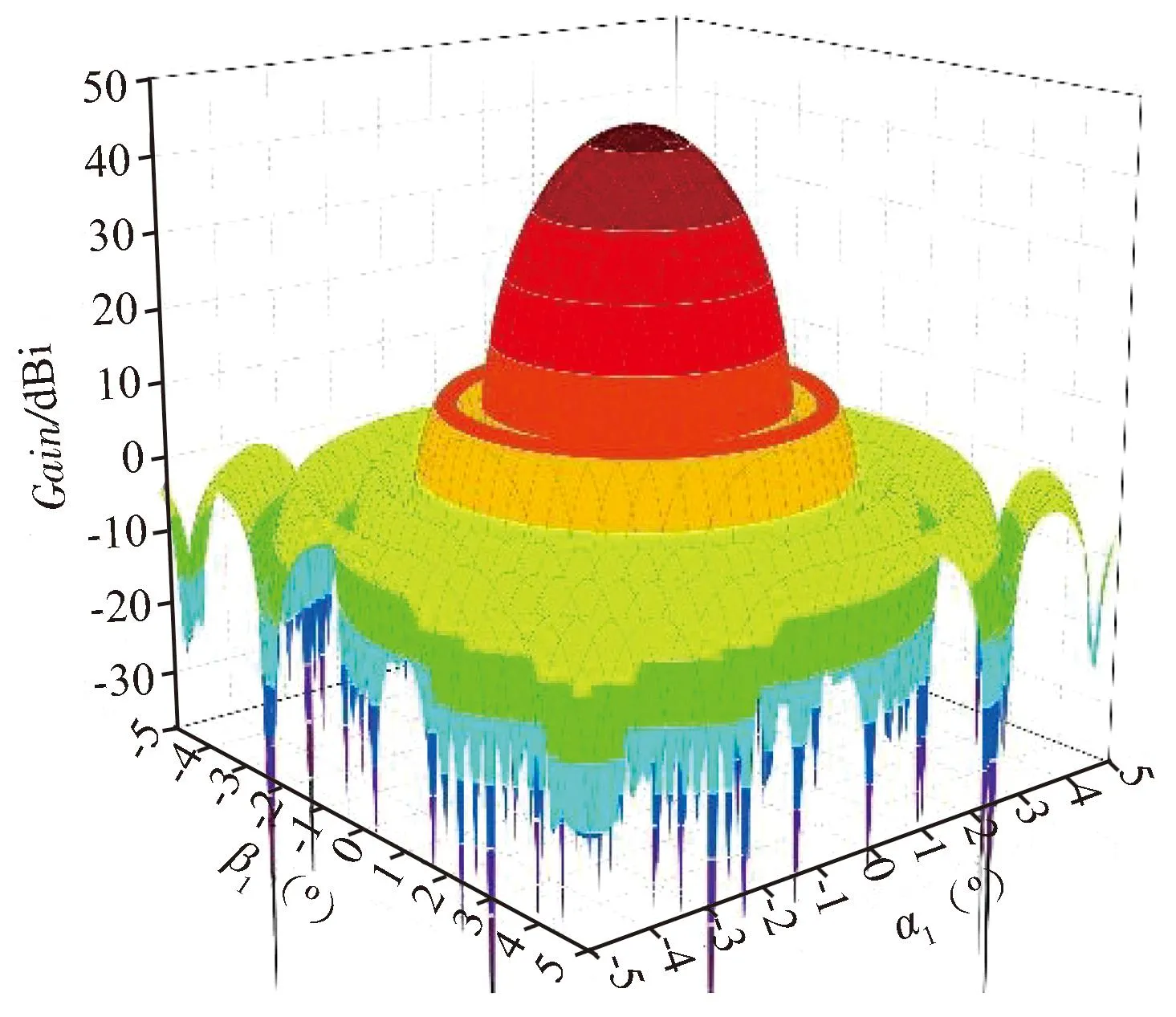
图3 天线增益三维图(αk=0°,βk=0°)Fig.3 3D diagram of antenna gain(αk=0°,βk=0°)

图4 天线增益三维图(αk=3°,βk=2°)Fig.4 3D diagram of antenna gain(αk=3°,βk=2°)
将干扰源的发射功率记作Pt,上行到卫星天线后在波束k中获得的放大增益(包括天线汇聚增益和电路放大增益)为G(θk) 。干扰信号从地球传播到卫星波束k,以及从卫星传播到地面中心站的过程中,存在自由空间传输损耗,记作Lk。测量得到波束k接收到的干扰信号强度为Pk。则对于波束k可以列出链路方程如式(11)所示:
Pk=Pt+G(θk)-Lk,
(11)
由此,可以列出等增益方程组:
(12)
已知干扰信号经上行远距离传输至卫星多波束天线上,波束之间邻近,故而上行传播特性几乎相等,由此得:
L1≈L2≈L3≈…。
(13)
消去Pt和L项,得到:
(14)
由以上分析可知,当知道G(θk)与θk的关系后,卫星中心站就可以通过测量信号强度、粒子群等迭代法来求解非线性方程组[16],由式(14)推算得到θ1、θ2、…、θk再根据式(8)列出方程组,解算得到干扰源的位置坐标变量xesa、yesa、zesa。
2 干扰源邻波束可用性分析
上节所述卫星干扰源定位的原理是建立在干扰信号可以被主受干扰波束接收到的同时,也可以被邻近的同频波束接收到,并且经变频下行后能被地面中心站接收和准确测量的基础上,才能建立方程组后求解,由此得到分析干扰源邻近波束的可用性。
典型的七色波束覆盖图如图5所示,图中波束1~9为同频复用波束。假设干扰源位于波束4、7和8之间,所发射频率位于波束1~9的上行频带中。
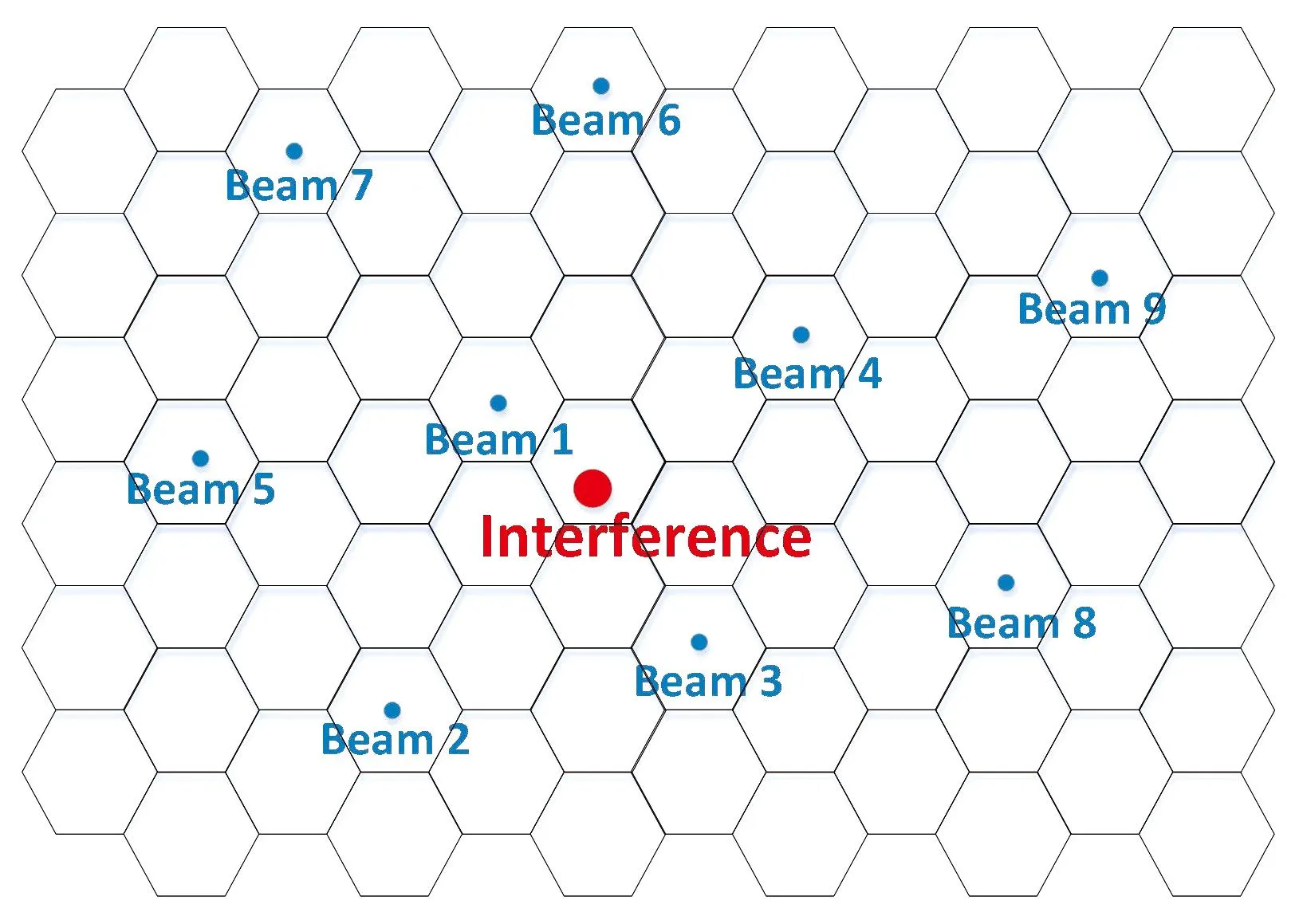
图5 七色波束覆盖图Fig.5 Seven-color beam coverage

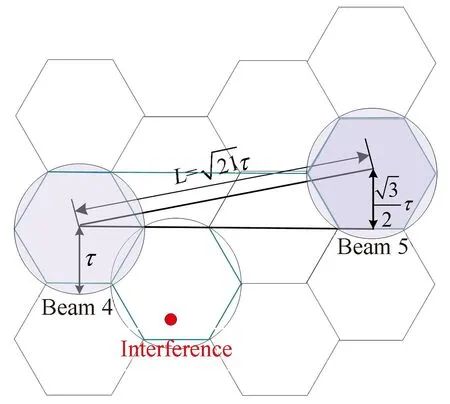
图6 同频复用相邻波束间距Fig.6 Co-frequency multiplexing adjacent beam spacing
由式(10)计算得θ3 dB=0.84°。假设定位模型中,卫星波束覆盖的地球表面被视为平面,卫星轨道高度H=35 786 km,因此可得:
(15)
相邻的同频波束的中心距离为:
(16)
根据三角函数知识,则对应的天线夹角为:
(17)
由图2天线增益方向图可知,正中心0°时波束中心增益为45.33 dBi;偏离中心1.9°时增益约为26.6 dBi;偏离中心1.92°时增益约为26 dBi;偏离中心2.2°时增益为15.29 dBi;偏离中心2.3°时增益为8.00 dBi;第一旁瓣峰值位于偏离中心2.8°处,此时增益为10.58 dBi。
卫星由于摄动等因素导致的卫星波束指向误差一般小于0.1°,2.02°对应的增益大小依然落在主瓣内,且增益约为23 dB。这就确保了当主要波束能够接收到信号时,附近的同频波束也不可避免地会收到信号。由于干扰源与每个波束的相对位置存在差异,使得信号在各个波束中获得的增益不同,按式(14)可解算干扰源的位置坐标。
从式(14)可以看出,测量得到的Pk由于空间传播损耗等因素,具有一定的不确定性,想要求解出干扰源的位置坐标变量xesa、yesa、zesa,至少需要式(14)有3个方程,即至少需要4个同频波束才能求解出干扰源的入射方向。
由式(5)可看出hant远远小于resa,故在缺少可利用波束的情况下,可以通过估计hant=0大致解算得到干扰源的位置坐标变量xesa、yesa。因而干扰源附近一般要有至少3个同频波束才能求解出干扰源的入射方向。
分析图5,当干扰位于波束覆盖图不同位置时,干扰源附近一般有3~7个波束能被接收和测量,此时干扰源位置能被求解。极少数情况下,干扰源位于七色波束覆盖图某些边缘,卫星天线仅能接收到1~2个波束。
3 定位误差分析
在单星多波束对干扰源进行定位的过程中实际上存在很多误差,会影响最终定位的精度。例如噪声等引起的接收信号的变化、卫星摄动导致引起的波束覆盖区域变化、地球不同地点海拔不一样而带来的高程差对定位精度的影响等,本节将分析这些因素对干扰源定位精度的影响。
结合式(14)可以看出,影响干扰源入射方向计算精度的主要是同频波束所接收到的干扰信号大小Pk、同频波束中心指向θk以及干扰源天线中心离海平面的高度为hant。
3.1 天线接收误差理论推导
在定位过程中,干扰源的具体位置由式(5)和式(10)给出,设λk(k-1)=Pk-Pk-1、fk(k-1)=G(θk)-G(θk-1),k=2,3,…,∞,则可得[17]:
(18)
对式(18)进行全微分,得:
(19)
将式(19)整理成矩阵形式如下:
dE=W0dX+W1dX1+W2dX2+W3dX3,
(20)
即:
dX=W0-1(dE-W1dX1-W2dX2-W3dX3),
(21)
其中:

将误差度量定义为:
(22)
为分析上述的干扰源定位方法的性能,本节设某星下点的经纬度(100°E,0°N)。已知干扰源周围是6个波束,分别在两种场景下进行仿真分析。
场景1与场景2相比,干扰源的位置更接近星下点。干扰源周围6个波束:波束1(93.2°E,34.92°N)、波束2(89.2°E,24°N)、波束3(100°E,26°N)、波束4(103.6°E,36.92°N)、波束5(82.2°E,32.92°N)、波束6(96.8°E,45.14°N)。
场景2干扰源周围6个波束:波束1(121.2°E,54.92°N)、波束2(117.2°E,44°N)、波束3(128°E,46°N)、波束4(131.6°E,56.92°N)、波束5(110.2°E,52.92°N)、波束6(124.8°E,65.14°N)。
3.2 测量增益误差对定位的影响
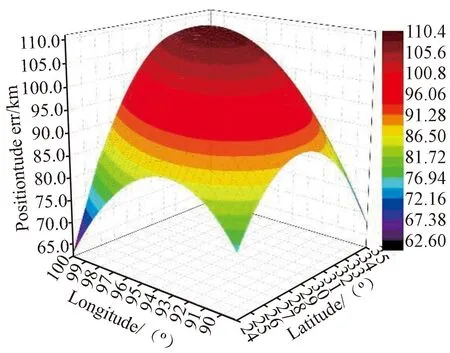
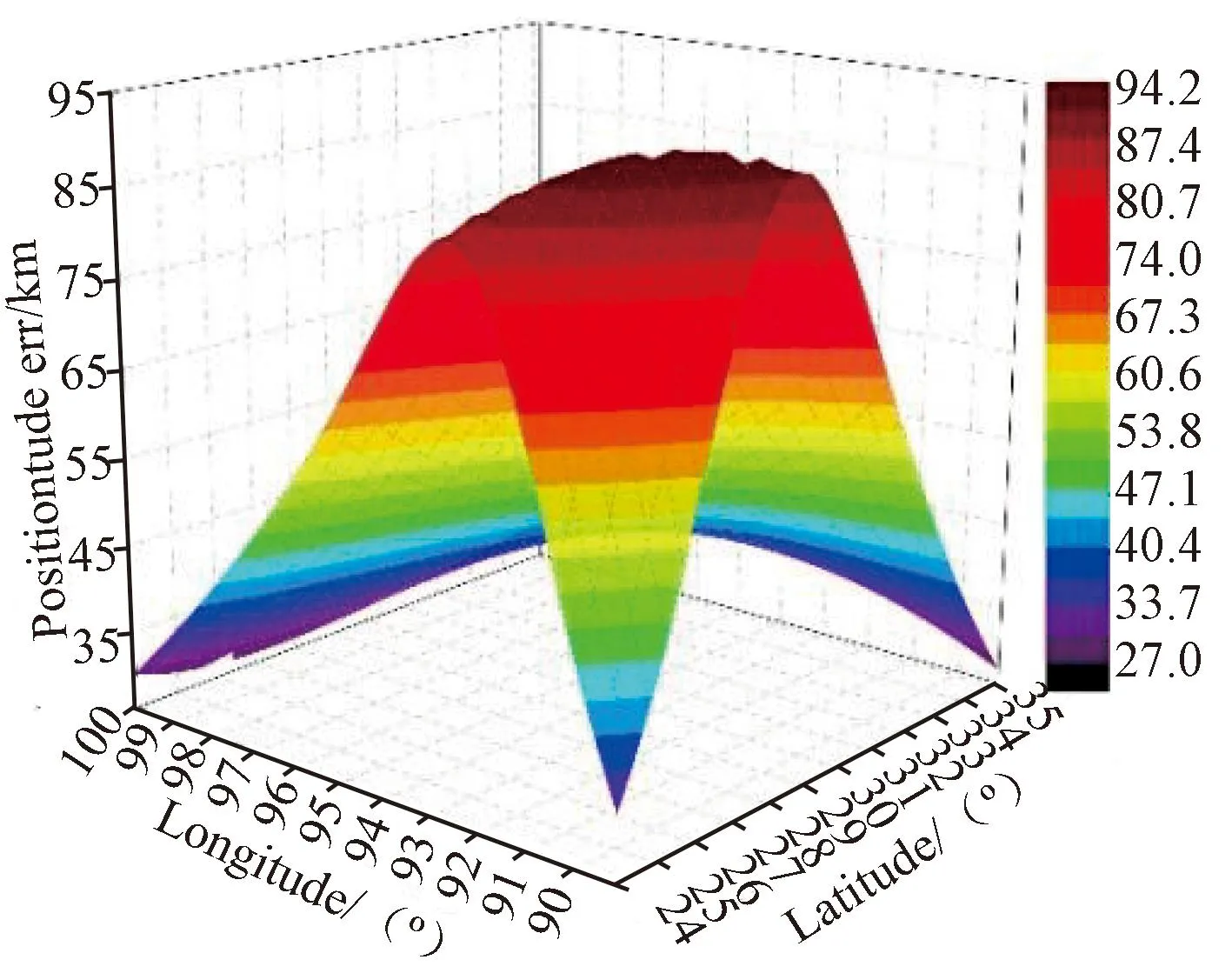
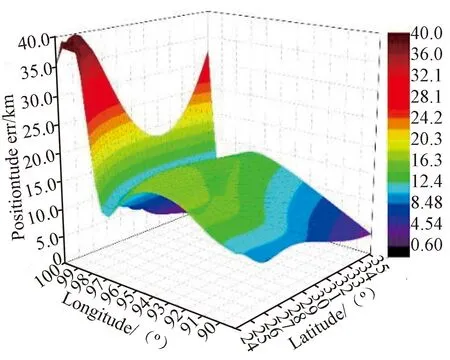
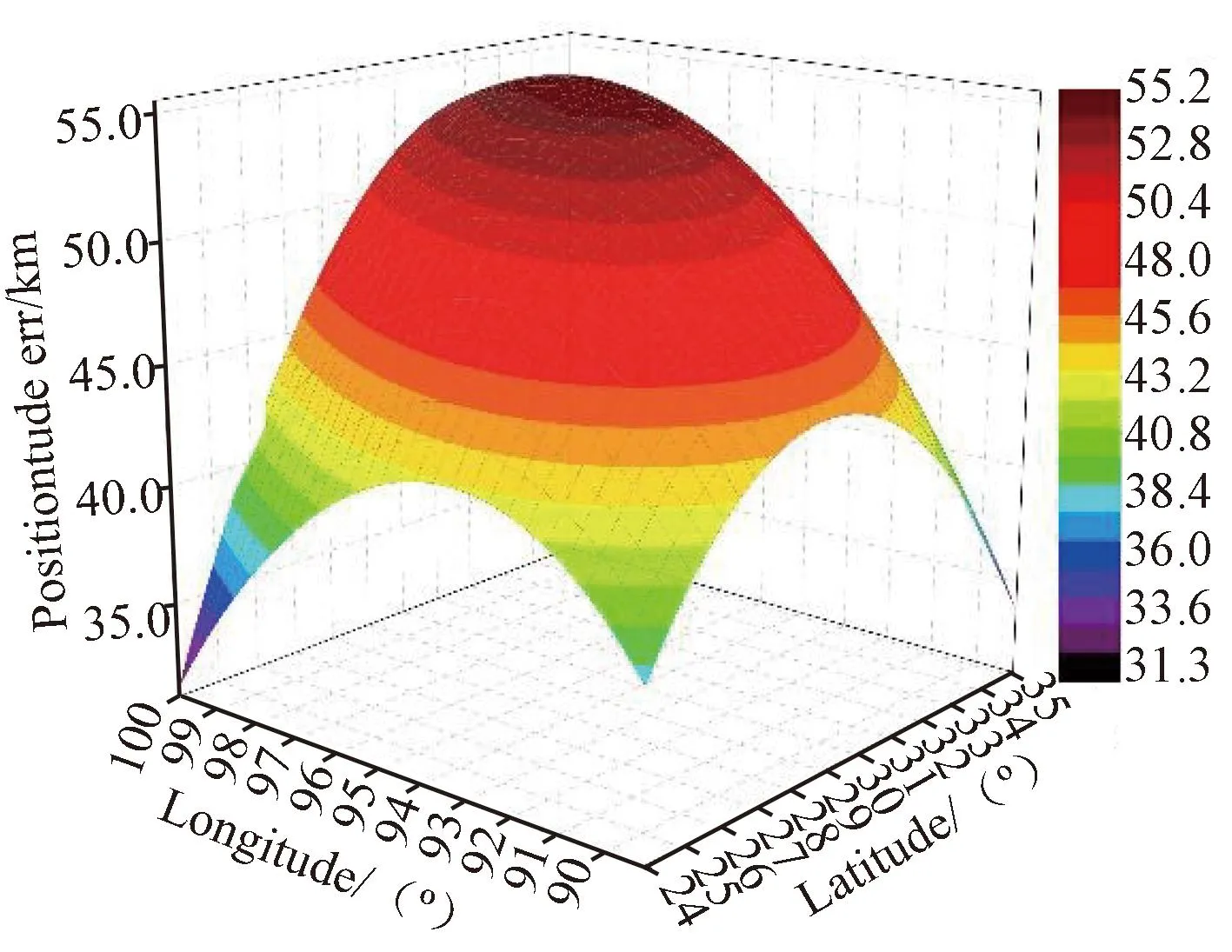
将相对增益测量误差设定为1 dB,波束指向偏差和干扰源海拔高度hant均为0情况下,当某个干扰源发射信号的情形下,设场景1的波束1~6能测量到干扰信号。当利用波束1~3这3个波束仿真解算,得到干扰源位于不同的经度和纬度时的定位误差为62.6~110.4 km,如图7(a)所示。当利用波束1~4这4个波束仿真解算,得到当干扰源位于不同的经度和纬度时的定位误差为27.0~94.2 km,如图7(b)所示。当利用波束1~5这5个波束仿真解算,得到当干扰源位于不同的经度和纬度时的定位误差为0.6~40.0 km,如图7(c)所示。当利用波束1~6这6个波束仿真解算,得到当干扰源位于不同经度和纬度时的定位误差为0~31.1 km,如图7(d)所示。
(a) 3个波束
(b) 4个波束
(c) 5个波束

(d) 6个波束图7 场景1相对增益误差1 dB的定位仿真误差Fig.7 Positioning simulation error with relative gain error of 1 dB in scenario 1
由图7(a)和图7(b)可知,在受干扰的区域内,目标干扰源越趋近某一波束中心,定位精度越高;目标越趋近中心区域,定位误差越大。原因在于本文所讨论的定位模型中,干扰源附近的波束增益大,相对误差所占百分比较小;反之,远离干扰源附近的波束增益小,相对误差所占百分比较大。由图7还可知,干扰源周围可用波束越多,定位误差越小,原因是定位条件越多,对定位位置限制越多,模糊度越小。
将相对增益测量误差设定为1 dB,波束指向偏差和干扰源海拔高度hant均为0,当某个干扰源发射信号的情形下,设场景2的波束1~6能测量到干扰信号。当利用波束1~3这3个波束仿真解算,得到干扰源位于不同的经度和纬度时的定位误差为79.2~151.0 km,如图8(a)所示。当利用波束1~4这4个波束仿真解算,得到当干扰源位于不同经度和纬度时的定位误差为53.9~78.6 km,如图8(b)所示。当利用波束1~5这5个波束仿真解算,得到当干扰源位于不同的经度和纬度时的定位误差为10.0~31.7 km,如图8(c)所示。当利用波束1~6这6个波束仿真解算,得到当干扰源位于不同经度和纬度时的定位误差为30.2~67.7 km,如图8(d)所示。

(a) 3个波束

(b) 4个波束

(c) 5个波束

(d) 6个波束图8 场景2相对增益误差1 dB的定位仿真误差Fig.8 Positioning simulation error with relative gain error of 1 dB in scenario 2
场景2下的定位误差相比较于场景1下,误差波动较大,且总体定位误差明显偏大,分析原因为场景2情况下干扰源距离星下点较远,可用波束与干扰源之间的夹角变小,导致增益误差角辨识度变差,从而带来干扰定位误差变大。
为了避免干扰源距离星下点较远时带来的误差,一般考虑在选星的时候就选取位于干扰源较近的卫星进行定位。由图8 (d)可看出,当远离星下点和干扰时,6个波束可能在某些区域比5个波束解算带来的定位误差更大,分析原因应该是新引入的波束更进一步远离星下点引起的。
上述仿真均在相对增益测量误差为1 dB的情况下,为比较相对增益测量误差的大小对定位误差的影响,在场景1情况下,对3个波束和4个波束进行仿真,仿真中将相对增益测量误差设定为0.5 dB,得到当干扰源位于不同的经度和纬度时的定位误差结果,如图9(a)和图9(b)所示。分别对比图7(a)和图7(b),可见定位误差与相对增益误差成正比。由此可见,在定位过程中,采用低噪声前端放大电路、再多次平均等,利用这些减小测量误差的措施来测量增益,能有效减小干扰源定位误差值。
(a) 3个波束

(b) 4个波束图9 场景1相对增益误差0.5 dB的定位仿真误差Fig.9 Positioning simulation error with relative gain error of 0.5 dB in scenario 1
3.3 波束指向误差对定位的影响
通信卫星在轨运行时,不可避免地受一些因素的影响而产生姿态变化,卫星姿态的变化将直接导致星载点波束天线的指向发生偏移,从而改变点波束的覆盖区域。一般情况下,卫星会通过调整天线波束指向,来减小对通信的影响,但总会存在指向误差。另外,多波束天线的设计和生产过程中,也会存在波束指向偏差。
由上节推导可知,本文的单星多波束定位算法是以可利用点波束指向固定为前提的,因此,本文仿真了当波束指向存在误差的情况下,对干扰源定位的影响。
如图1所示,设将每个波束的中心分别偏离αk=0.01°和βk= 0.01°,相对增益测量误差和干扰源海拔高度hant均为0情况下,设场景1的波束1~6能测量到干扰信号。当利用波束1~3这3个波束仿真解算,得到干扰源位于不同的经度和纬度时的定位误差如图10(a)所示;当利用波束1~4这4个波束仿真解算,得到当干扰源位于不同的经度和纬度时的定位误差如图10(b)所示;当利用波束1~5这5个波束仿真解算,得到当干扰源位于不同的经度和纬度时的定位误差如图10(c)所示;当利用波束1~6这6个波束仿真解算,得到当干扰源位于不同的经度和纬度时的定位误差如图10(d)所示。由图10可看出,场景1下波束中心两轴偏差0.01°时,利用3~6个波束定位,4种情况下带来的误差均约为6.5~7.4 km。

(a) 3个波束
(b) 4个波束

(c) 5个波束

(d) 6个波束图10 场景1波束中心两轴偏差0.01°的定位误差Fig.10 Positioning error of the beam center with a deviation of 0.01° between the two axes in scenario 1
设将每个波束的中心分别偏离αk=0.01°和βk= 0.01°,相对增益测量误差和干扰源海拔高度hant均为0情况下,在场景2下分别进行仿真。干扰源位于不同位置时得到的定位误差结果如图11所示,可看出利用3~6个波束定位,4种情况下带来的误差均约为9.8~15.1 km。
(a) 3个波束
(b) 4个波束

(c) 5个波束

(d) 6个波束图11 场景2波束中心两轴偏差0.01°的定位误差Fig.11 Positioning error of the two-axis deviation of the beam center under the scenario 2 is 0.01°
分析上述原因,一般由于卫星姿态发生变化时,天线的每个波束中心会存在同向同样的指向误差。在做定位误差解算时,干扰源是以这些波束作为参考系的,如果整个参考系发生了位移,解算得到的干扰源位置自然也会发生位移。增加同频波束只会增加更多参考点,不会影响整个参考系的位移。
场景2的定位误差相比较于场景1,波束有指向偏差时误差较大,与3.2节原因一样,同样是场景2情况下干扰源距离星下点较远,可用波束与干扰源之间的夹角变小,导致增益误差角辨识度变差,从而干扰定位误差变大。
3.4 地面海拔对定位的影响
由上文分析可知,干扰源在解算时地理位置未知,当然天线中心离海平面的高度hant也未知。由前文分析知,hant也会对定位误差产生影响。
为简化分析,假设将相对增益测量误差设定为1 dB,波束场景1和波束指向偏差为0°,对hant=3 km和hant=0 km情况下定位误差求相对值,当利用波束1~3这3个波束仿真解算,得到干扰源位于不同的经度和纬度时hant=3 km和hant=0 km相对定位差如图12(a)所示;当利用波束1~4这4个波束仿真解算,得到当干扰源位于不同的经度和纬度时hant=3 km和hant=0 km相对定位差如图12(b)所示;当利用波束1~5这5个波束仿真解算,得到当干扰源位于不同的经度和纬度时hant=3 km和hant=0 km相对定位差如图12(c)所示;当利用波束1~6这6个波束仿真解算,得到当干扰源位于不同的经度和纬度时hant=3 km和hant=0 km相对定位差如图12(d)所示。

(a) 3个波束

(b) 4个波束

(c) 5个波束

(d) 6个波束
由图12可知,场景1下干扰源所处位置的海拔所带来的定位差一般在500 m以下。分析原因为海拔高相对于海拔低,在本文所讨论的定位模型中,相当于干扰源与其他波束中心的夹角产生微小变化,因而带来的相对定位差较小。6个波束中可能在某些区域比5个波束解算带来的定位差会更大,分析原因应该是新引入的波束更进一步远离星下点所引起的。
4 结束语
近年来多波束天线的广泛使用,引出了单GE0卫星多波束干扰源定位方法,为干扰源的定位提供了新思路。本文设卫星位置及卫星多波束天线波束中心指向位置已知,干扰源位置未知,通过测量卫星中心地面站多个同频波束的信号,从而解算得到干扰源的地理位置。
本文重点分析了增益测量误差、波束指向误差和海拔对定位精度的影响,并通过理论推导和仿真分析得到增益误差和波束指向误差对定位精度的影响程度。从仿真结果可以得出,增益测量误差是导致定位误差的重要因素。在仅存在增益测量误差的情况下,当干扰源越趋近一个波束中心的时候,定位误差会急剧减小,越靠近3个波束围成的区域中心的时候定位误差越大。卫星由于有天线调整装置,单独引入波束指向小误差时,最终的定位误差一般在几千米到十几千米。此外,干扰源未知海拔引入的误差相对增益测量差一般在500 m以下。
猜你喜欢
中学生数理化(高中版.高考数学)(2021年6期)2021-07-28
通信技术(2019年3期)2019-05-31
电子测试(2018年6期)2018-05-09
传媒评论(2017年8期)2017-11-08
声学与电子工程(2017年1期)2017-06-22
电子制作(2017年10期)2017-04-18
电信科学(2016年9期)2016-06-15
中国交通信息化(2016年5期)2016-06-06
现代工业经济和信息化(2016年8期)2016-05-17
四川师范大学学报(自然科学版)(2015年4期)2015-02-28