基于PCA-SVM的飞机蒙皮激光分层除漆LIBS在线监测研究
2023-12-13 06:36杨文锋林德惠钱自然李绍龙朱德华
光谱学与光谱分析 2023年12期
杨文锋, 林德惠, 曹 宇, 钱自然, 李绍龙, 朱德华, 李 果, 张 赛
1. 中国民用航空飞行学院民机复合材料研究中心, 四川 广汉 618307 2. 温州大学机电工程学院, 浙江 温州 325035
引 言
目前, 飞机蒙皮表面除漆一般采用化学溶剂、 手工打磨和喷丸工艺, 这些传统除漆方式普遍存在低效高耗、 环境污染等弊端。 激光除漆作为一种全新的清洗技术, 以其环境污染小、 除漆效率高、 定位准确等优势, 成为极具发展潜力的除漆新技术[1]。 但除漆过程及效果的可控性及智能化集成依赖于原位、 实时的在线监测技术。 目前, 激光清洗监测技术主要集中在声信号[2-3]、 光信号[4-5]和光谱信号[6-7]监测, 但声监测方法易受环境噪声影响且精度有限, 图像监测实时性差。
激光诱导击穿光谱(laser induced breakdown spectroscopy, LIBS)技术是将高能激光脉冲单点作用于样品表面, 诱导产生等离子体, 以其发射光谱确定样品元素及含量, 具有实时性强、 精度高的特点, 已广泛用于低频(Hz级)纳秒脉冲激光清洗艺术品及文物过程的在线监测研究[8-9]。 佟艳群[10]、 Zhou[11]等采用低频纳秒脉冲激光单点作用于漆层表面, 分析了不同脉冲次数下LIBS光谱特征峰强度的变化规律, 以探索激光除漆过程的LIBS在线监测方法, 为激光除漆LIBS在线监测提供了宝贵思路与方法借鉴。 由于低频纳秒激光脉冲间隔时间(ms量级)远大于等离子体寿命(μs量级), 可基于等离子体演变规律设置采集延时及积分时间, 有效避免等离子体产生初期黑体辐射、 韧致辐射及复合辐射所致的连续背景光谱。 然而, 为保证激光除漆效果与效率, 实际除漆过程中一般采用高频(kHz级)纳秒脉冲激光进行平面扫描。 激光脉冲间隔与等离子体寿命在同一量级。 首先, 实际除漆过程中, 前后相邻等离子体演变之间相互影响, 黑体辐射等产生的连续背景光谱难以避免, 光谱数据处理难度增大。 其次, 漆层微区不均匀性将导致LIBS光谱的特征谱线及其强度呈现一定的随机性与不稳定性, 光谱数据分析难度增大。 故基于实际高频激光除漆过程中的LIBS数据处理及分析值得进一步研究。 孙兰香[12]、 Zha[13]等率先开展了kHz级高频纳秒脉冲激光清洗过程的LIBS在线监测研究, 基于皮尔逊相关系数建立了激光清洗单层树脂、 锈蚀层的LIBS在线监测判据。 然而, 飞机蒙皮漆层体系复杂, 且除漆区域存在微区不均匀性, 导致特征谱线呈现一定的随机性与不稳定性。 为提高在线监测的效率、 准确率及智能化水平, 有必要引入机器学习算法。
支持向量机(support vector machines, SVM)是数据挖掘中常用的一种机器学习算法, 可实现复杂数据集的识别, 具有全局最优性和较好的推广能力。 但对于含大量噪声的高维LIBS数据, SVM算法耗时较长且准确率较低。 主成分分析(principal component analysis, PCA)可在保留原始数据大部分信息的情况下, 有效降低LIBS数据维数并排除非重要信息。 Li等[14]利用PCA-SVM算法, 实现了不同部位猪肉LIBS数据的快速识别, 平均准确率达到了99.83%。 Sheng等[15]将LIBS技术与PCA-SVM结合, 实现了10个等级铁矿石的准确识别, 平均识别率为96%。 以上研究表明基于PCA-SVM可实现LIBS数据的快速、 准确识别。
针对飞机蒙皮激光分层可控除漆在线监测需求, 基于高频脉冲激光除漆LIBS在线监测平台, 采集面漆、 底漆、 铝合金基体去除过程中的3类光谱, 用于模型训练及测试; 利用PCA进行LIBS数据降维, 结合SVM算法建立面漆、 底漆、 铝合金基体3类光谱识别的机器学习模型; 并通过测试数据及实验进行模型的有效性验证。 可获得多漆层结构激光分层可控清除过程的LIBS在线监测判定规则, 为飞机蒙皮激光除漆过程的LIBS在线监测提供参考。
1 实验部分
1.1 试样制备
基体为飞机蒙皮常用的2024-T3态Al-Cu-Mg系硬铝合金, 厚度约为2 mm。 按手册规定的喷漆要求进行阳极氧化处理后, 分别喷涂单层漆(约30 μm绿色CA7700环氧底漆)和双层漆(30 μm白色CA8000聚氨酯面漆+30 μm绿色CA7700环氧底漆), 并切割为50 mm×50 mm×2 mm的试样。 面漆(top coaingt, Tc)、 底漆(primer, Pr)、 铝合金基体(aluminum sub, As)的能谱仪(energy dispersive spectroscopy, EDS)测试结果见图1。
三类材料间差异较大的金属元素有: Ti、 Cr、 Zn、 Al、 Mg、 Cu、 Mn, 其含量对比如表1, 将其作为光谱分析的示踪元素。
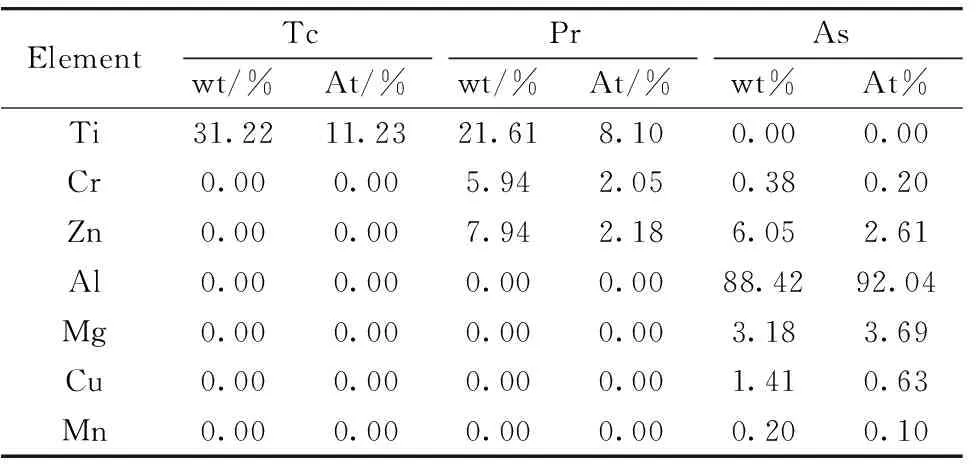
表1 三类材料示踪元素含量对比Table 1 Comparison of tracer element contents of three types of materials
1.2 激光除漆LIBS在线监测系统
激光除漆LIBS在线监测系统由激光除漆系统和LIBS在线监测系统两部分组成。 如图2所示, 激光除漆系统由光纤脉冲激光器(波长: 1 064 nm, 频率范围: 1~200 kHz, 功率范围: 0~120 W, 脉宽范围: 60~350 ns, 光斑聚焦直径为 50 μm)、 扫描振镜、 激光加工头等组成。 LIBS在线监测系统主要包括: 光纤光谱仪(型号FX 2000, 全波段探测范围: 360~700 nm, 分辨率: 0.16 nm, 积分时间: 1 ms~60 s)、 采集探头、 光纤、 计算机。
激光束入射至扫描振镜, 在相关软件的控制下, 扫描振镜按照设定的路径摆动, 从而实现激光束在样品表面清洗, 该过程将产生等离子体。 同时, 采集探头采集等离子体信号, 并通过光纤传输至光谱仪, 光谱仪对采集到的光信号进行分光和数字转换, 最终转换成光谱数据并传输至计算机。
基于前期试验, 选择激光频率为100 kHz, 扫描速度为3 000 mm·s-1, 扫描区域为10 mm×10 mm。 为降低脉冲能量抖动对LIBS光谱稳定性的影响, 设置光谱仪积分时间为10 ms, 每幅LIBS光谱为连续1 000个激光脉冲产生等离子体的累积光谱。 激光功率从30 W开始, 以1.2 W为梯度递增至40.8 W, 共10组激光参数。 相应的激光能量密度范围为15.29~20.79 J·cm-2。 面漆、 底漆、 铝合金基体均采用上述10组激光参数进行去除, 每组实验中各采集10幅LIBS光谱, 共采集300幅光谱作为标准光谱, 用于识别模型训练及测试。
2 结果与讨论
2.1 数据预处理
与低频脉冲激光单点作用采集的针状谱[图3(a)]相比, 高频脉冲激光平面扫描采集光谱[图3(b)]谱线较宽, 且包含很强的包络状连续背景, 如图3。
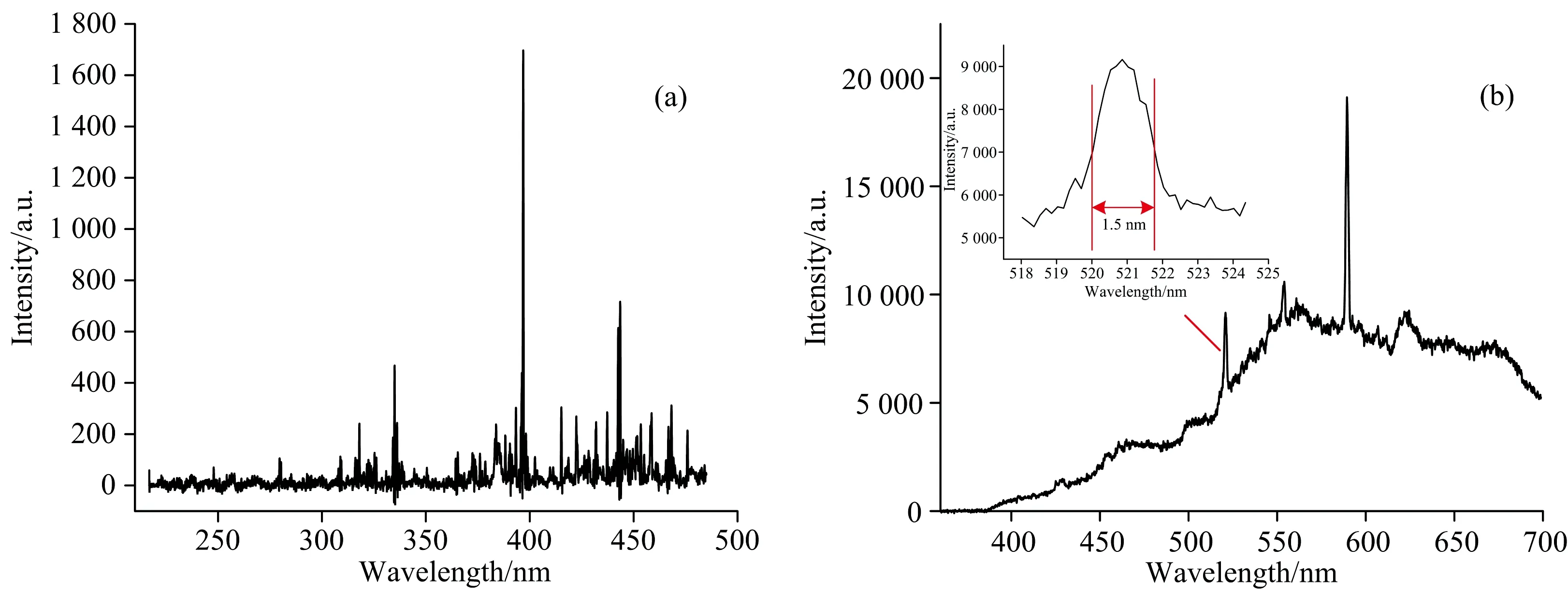
图3 低频脉冲激光单点作用与高频脉冲激光平面扫描采集LIBS光谱对比(a): 低频脉冲激光单点作用采集LIBS光谱; (b): 高频脉冲激光平面扫描采集LIBS光谱Fig.3 Comparison of LIBS spectra acquired by low-frequency pulsed laser single-point action and high-frequency pulsed laser plane scanning(a): LIBS spectra acquired by low-frequency pulsed lasers at a single point of action; (b): LIBS spectra acquired by high-frequency pulsed laser plane scan
低频脉冲单点作用采集光谱的半峰全宽约为0.1 nm; 而高频激光平面扫描采集谱线的半峰全宽约为1.5 nm。 谱线增宽主要是由于脉冲间隔时间为10 μs(由激光频率为100 kHz可得), 而激光诱导等离子体持续时间约为十几至几十μs, 逐渐膨胀和冷却的等离子体受后续激光作用再次激发, 等离子体电子密度增大, 产生较强的斯塔克效应所致[16]。 连续背景主要来自两个方面: 首先, 每幅光谱是连续1 000个激光脉冲产生等离子体全生命周期的累积光谱, 等离子体产生初期, 黑体辐射、 韧致辐射及复合辐射共同作用使得光谱中存在较强连续背景[12]。 其次, 等离子体再次激发导致等离子体内部碰撞加剧, 其电子密度、 电子温度增大, 产生更多的韧致辐射, 连续背景进一步增强。 连续背景导致特征光谱峰值强度无法直接反映等离子体发射光谱的强度, 影响光谱分析的准确性, 故连续背景的有效去除是LIBS在线监测必将面临和解决的问题。
对于低频脉冲激光单点采集的针状谱, 传统均值平滑滤波算法可实现背景光谱的有效去除。 算法原理为: 每个数据点左右直接相邻的若干个数据点构成光谱滑动窗, 从左至右依次滑动, 滑动窗内光谱强度的均值即为背景, 每个滑动窗中心数据点的强度扣除该均值, 即可去除连续背景。 由于低频脉冲激光单点采集的针状谱半峰全宽约为0.1 nm, 一般小于光谱数据点间隔, 其直接相邻的数据点均可视为背景, 故采用均值平滑滤波算法可获得较好的效果。
高频脉冲激光平面扫描采集的光谱半峰全宽约为1.5 nm, 远大于光谱数据点间隔, 特征谱线含多个数据点, 其直接相邻的数据点并非背景光谱, 传统均值平滑滤波算法将导致光谱的峰值强度严重失真。 进行如下改进: 滑动窗由扣除数据点左右各1.5 nm(约9个光谱数据点)后紧邻的20个光谱数据点(左右各10个光谱数据点, 即N=10)组成, 如图4(a)。 将滑动窗从左向右依次滑动, 滑动窗内光谱数据的均值记为背景值, 所有光谱强度值扣除对应的背景值即为结果。 其转换函数如式(1)

图4 光谱连续背景处理前后对比(a): 原始光谱; (b): 传统均值平滑滤波算法处理结果; (c): 改进均值平滑滤波算法处理的结果Fig.4 Comparison of spectra before and after continuous background processing(a): Original spectrum; (b): The result of processing by the traditional mean smoothing filtering algorithm; (c): The result of processing by the improved mean smoothing filtering algorithm
(1)
式(1)中,yi为扣除背景后的强度,xi为原始光谱强度。
图4为光谱连续背景处理前后对比。 原始光谱中1、 2、 3号峰的去除背景后强度分别约为: 3 559、 1 657和10 707 a.u., 如图4(a)。 采用传统均值平滑滤波算法[12]去除连续背景后, 1、 2、 3号峰值强度分别约为: 678、 588和2 041 a.u., 峰值强度明显减小, 且1、 2号峰强度比例发生明显改变, 如图4(b)。 采用改进均值平滑滤波算法去除背景后, 1、 2、 3号峰值强度分别约为: 3 517、 1 762和10 373 a.u., 与实际强度吻合良好, 如图4(c)。
不同激光参数、 光谱仪积分时间下, 光谱强度存在显著差异。 为保证后续算法的稳定性, 还需消除不同尺度的影响, 即采用特征谱线的相对强度作为算法输入。 采用Min-Max方法(也称离差标准化法)将光谱数据归一化为无量纲数据, 使其结果均落到[0, 1]区间, 如图5。 其转换函数如式(2)
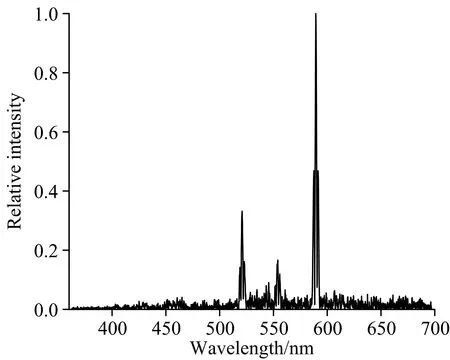
图5 归一化处理结果Fig.5 The result of normalization processing
yi=(xi-min{xj})/(max{xj}-min{xj})
(2)
式(2)中, max{xj}为光谱强度的最大值, min{xj}为光谱强度的最小值。
2.2 数据降维
LIBS光谱的数据维数约为2 000, 若将全谱数据作为算法的输入, 数据量庞大, 且包含大量噪声, 将导致算法收敛速度慢、 识别准确率降低, 应先进行光谱数据降维。
特征谱线(即能代表激发元素的谱线)数量较全谱数据大幅减少, 同时有助于识别不同类别的光谱。 图6为不同激光能量密度下, 三类材料的LIBS光谱, 例如Tc-15.29表示激光能量密度为15.29 J·cm-2时, 面漆的LIBS光谱。 3类光谱在589.53 nm处均存在相对强度一致的特征谱线(相对强度均为1), 故不将其作为特征谱线进行讨论。 Tc类光谱中示踪元素的特征谱线稳定; Pr类光谱在激光功率较大时, 示踪元素Ti、 Cr的特征谱线(2、 3、 4、 6、 8、 9、 12)出现; As类光谱在激光功率较大时, 示踪元素Mg、 Al、 Cr的特征谱线(1、 4、 5)出现。 示踪元素特征谱线的不稳定性增加了光谱识别的难度, 仅凭一条或几条特征谱线进行识别容易产生误判, 故应综合考虑上述12条特征谱线。
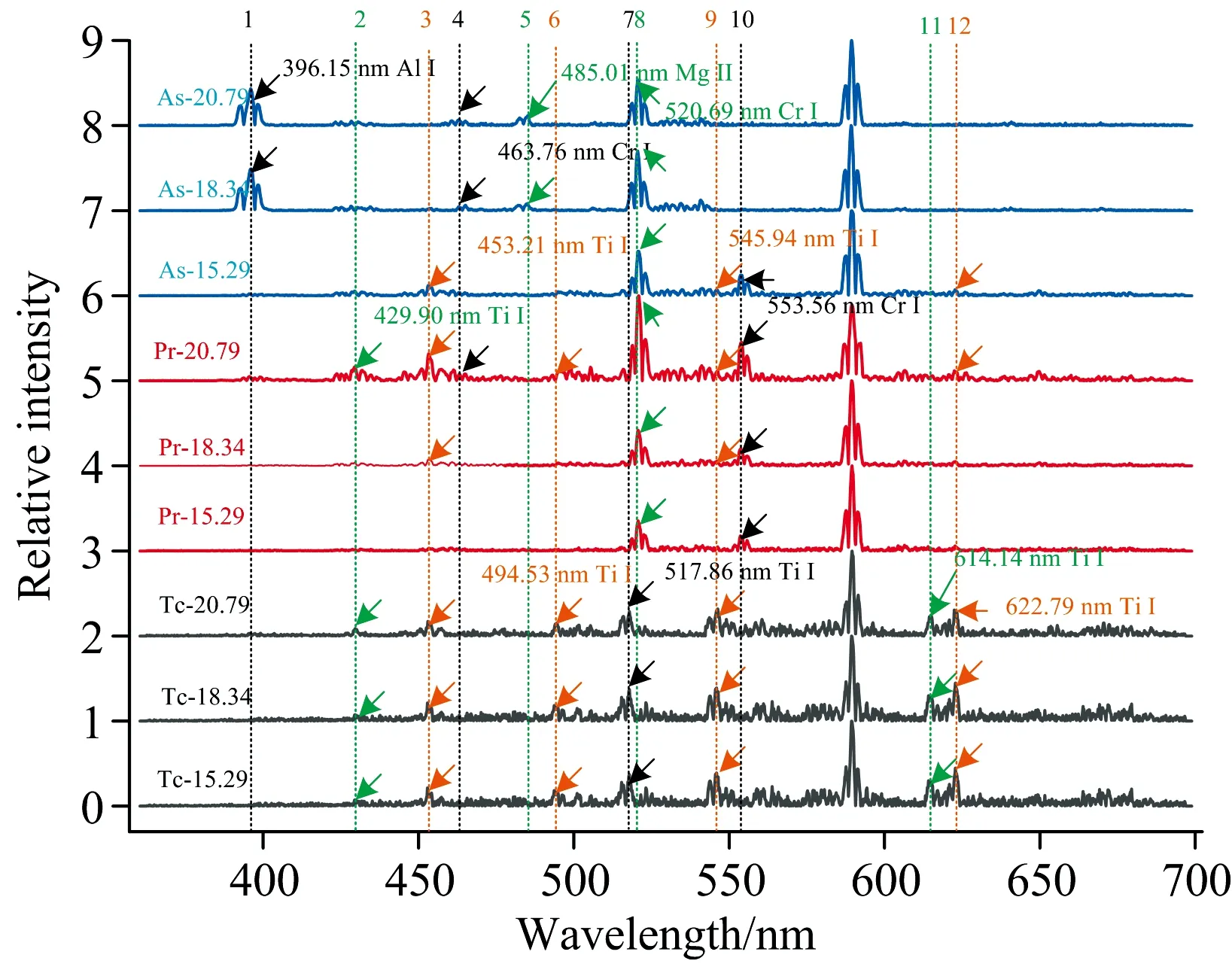
图6 特征谱线的确定Fig.6 Determination of eigenvalue lines
参考ASD原子光谱数据库进行谱线标定, 结果如表2所示。 波长与标准波长存在一定误差, 主要由基体效应及环境因素影响[12]。 误差最大值为0.098 2 nm, 为减小误差对分析结果的影响, 取最大误差作为寻峰的范围, 即将标准波长左右0.098 2 nm范围内谱线强度的最大值作为该特征谱线的强度。
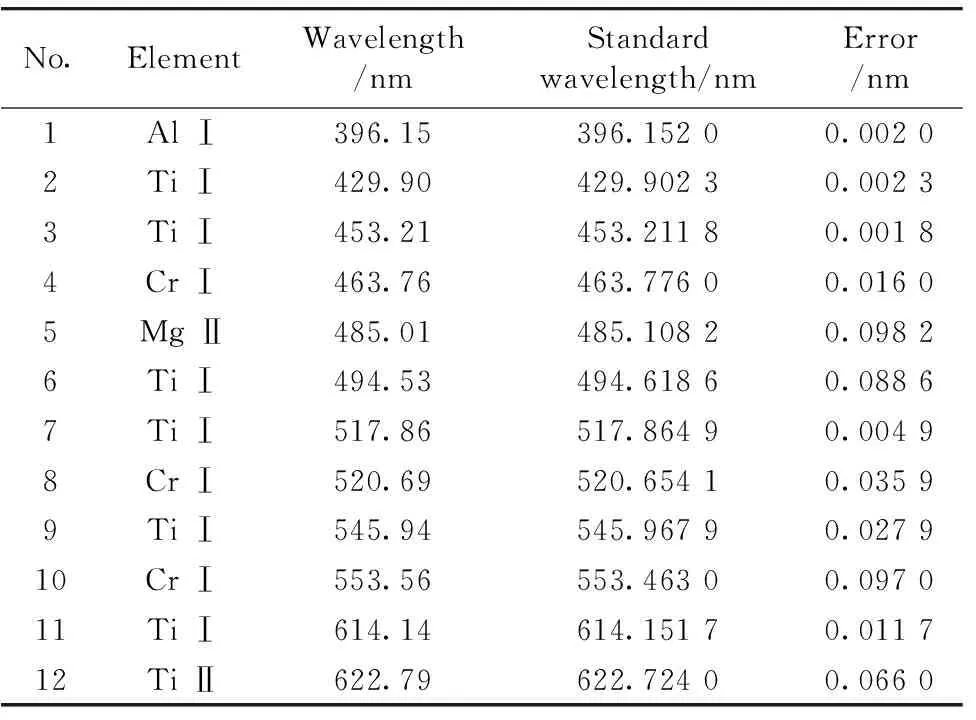
表2 特征谱线误差分析Table 2 Results of normalization processing
为进一步提高识别模型的收敛速度, 缩短训练时间, 利用主成分分析(principal component analysis, PCA)对12条特征谱线进行降维, 结果如图7所示。 PCA处理后各主成分得分与累积得分如图7(a), 左纵轴表示各主成分的解释率, 右纵轴表示主成分的累计解释率。 前3个主成分(PC1, PC2和PC3)的累计解释率已达到95%, 可代表光谱的主要信息。 计算每幅光谱的前3个主成分得分, 显示在由3个主成分向量组成的三维空间中, 如图7(b)。 可以看出, 样本的聚类效果较好, 同类样本呈区域性聚集, 达到了明显的区域划分效果, 但铝合金基体与底漆两类光谱中存在相近样本, 需借助算法进一步识别。
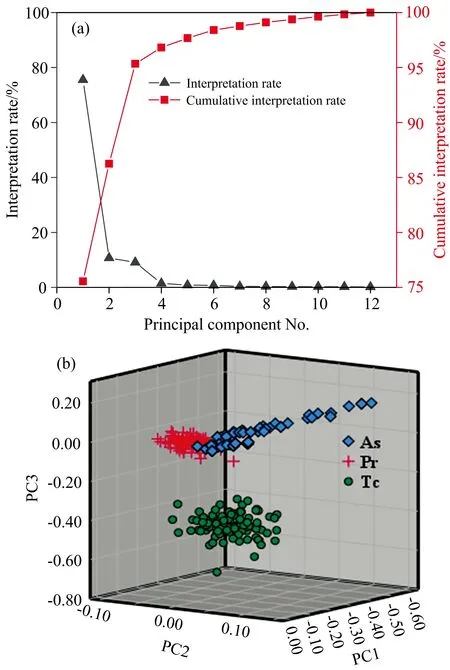
图7 3类样品LIBS数据的PCA分析结果(a): 各主成分解释率和累计解释率; (b): 标准光谱分布图Fig.7 PCA analysis results of LIBS data from 3 samples(a): The interpretation rate and cumulative interpretation rate of each principal component; (b): Distribution plot of standard spectral data
2.3 支持向量机(SVM)识别模型
从每类样品的100幅光谱中随机取60幅用于训练, 即训练组包含180幅光谱; 每类样品剩余40幅光谱用于测试, 即测试集包含120幅光谱。 以2.2节中的PC1, PC2和PC3主成分代替3类样品的全谱数据, 构建特征空间向量, 特征向量构成的数据作为SVM识别模型的输入量。 为保证模型稳定性, 采用五折交叉验证方式进行模型评估, 并进行多次随机划分训练集和测试集并训练网络。 识别结果的混淆矩阵如图8所示, 训练集、 测试集的识别准确率分别为99.44%、 100%。 测试集120幅光谱的识别总时间约为0.001 s, 平均每幅光谱的识别时间为0.008 ms。 结果表明: 建立的PCA-SVM模型实现了面漆、 底漆、 铝合金基体光谱的快速、 准确识别, 形成了多漆层结构样品激光可控去除过程的LIBS在线监测判定规则。
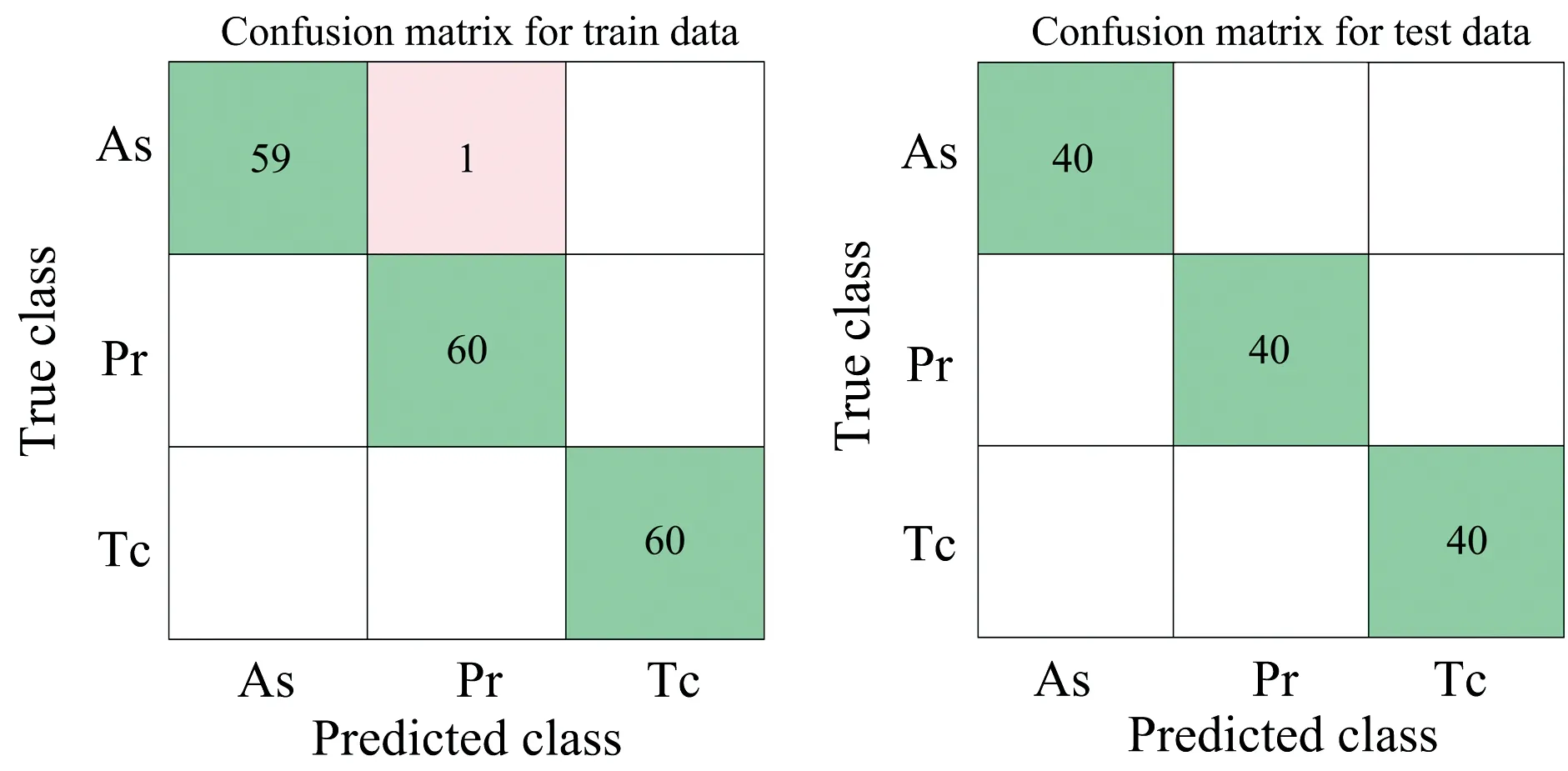
图8 3类光谱PCA-SVM模型识别结果的混淆矩阵(a): 训练集; (b): 测试集Fig.8 Confusion matrix of PCA-SVM model identification results for 3 types of spectral data(a): Train data; (b): Test data
3 结果与讨论
采用均匀涂覆双层漆的铝合金样品进行验证实验, 实验参数如表3所示, 扫描区域为10 mm×10 mm。 在T5实验过程中, 设置光谱仪积分时间为10 ms, 每次扫描过程各采集5幅光谱, 共采集25幅, 并按时间顺序编号。
表3 验证实验激光参数Table 3 Laser parameters of validated experiments
提取每幅光谱的12条特征谱线强度, 计算其在主成分PC1、 PC2、 PC3上的分量, 绘制光谱分布图, 结果如图9(a)。 图9(b)为标准光谱分布图, 对比可知, 第1~2次、 第3~4次、 第5次扫描采集光谱的分布区域分别与标准光谱中面漆、 底漆、 铝合金基体的分布区域吻合。
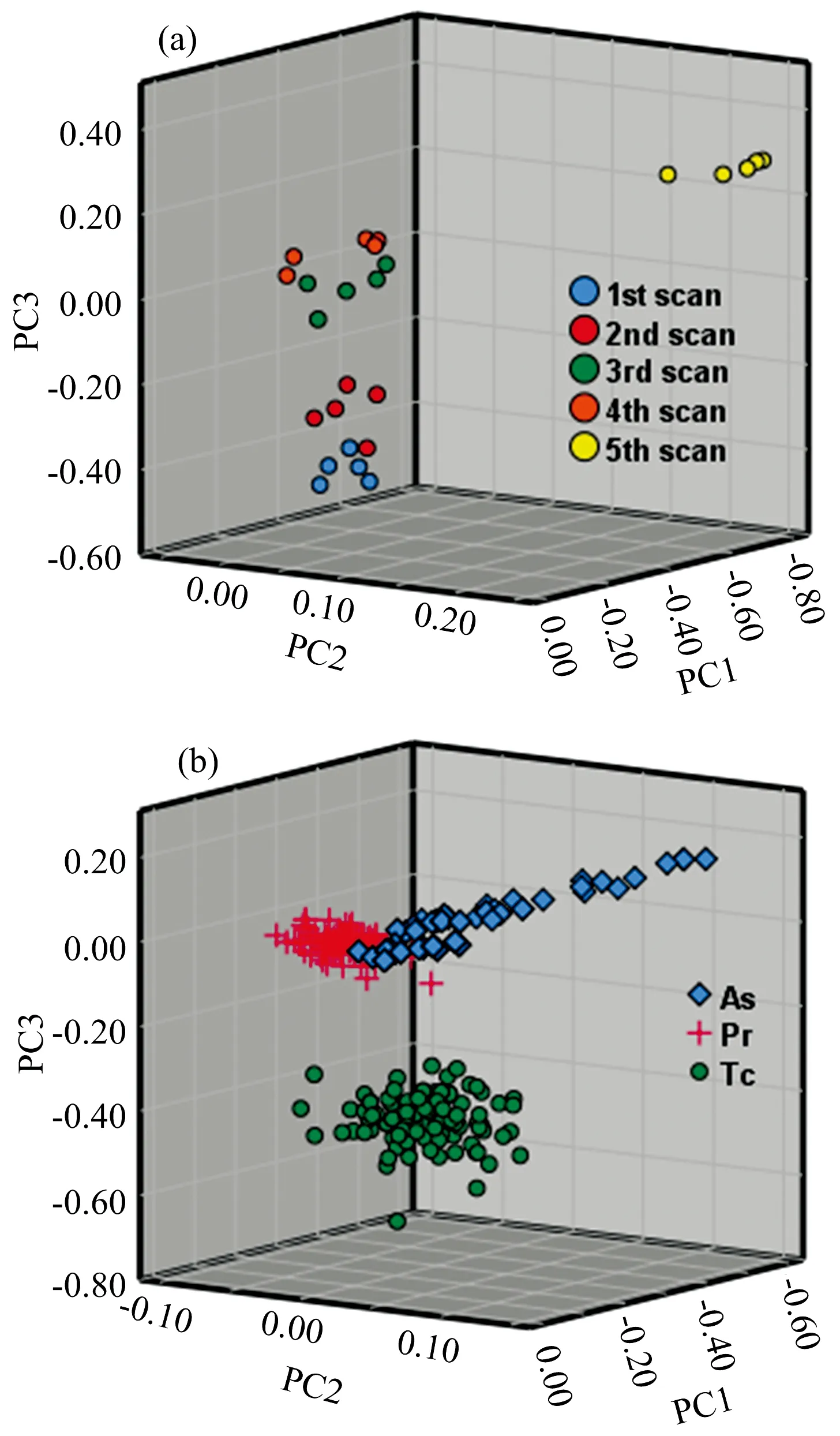
图9 光谱分布图(a): 验证实验采集光谱分布图; (b): 标准光谱分布图Fig.9 Three-dimensional scatter plot of the first 3 principal components of the spectral data(a): Spectral data of validated experiments; (b): Spectral data used for modeling
将上述PC1, PC2和PC3主成分构成的数据输入SVM识别模型, 识别结果如图10所示。 第1~2次、 第3~4次、 第5次扫描采集光谱的识别结果分别为面漆、 底漆、 铝合金基体。

图10 PCA-SVM模型识别结果Fig.10 Recognition results of PCA-SVM model
不同扫描次数下样品的宏观图如图11所示。 第1次扫描后, 样品呈灰白色, 如图11中T1所示, 表明第1次扫描去除了部分面漆; 第2次扫描后, 白色面漆呈星点状残余, 露出绿色底漆, 如图11中T2所示, 表明第2次扫描后, 恰好达到底漆与面漆的分界处, 第2次扫描去除了剩余面漆及少量底漆; 第3次扫描后, 样品呈绿色, 如图11中T3所示, 表明第3次扫描去除了部分底漆; 第4次扫描后, 底漆基本去除, 露出黄色氧化膜, 如图11中T4所示, 表明第4次扫描去除了剩下的底漆; 第5次扫描后, 露出金属光泽, 如图11中T5所示, 表明第5次扫描去除了氧化膜和部分铝合金基体。 即第1~2次、 第3~4次、 第5次扫描去除的材料主要为面漆、 底漆、 铝合金基体材料。

图11 不同扫描次数下样品宏观图Fig.11 Macroscopic plot of samples with different numbers of scan
上述分析结果与PCA-SVM模型识别结果一致。 验证实验结果表明: PCA-SVM模型可实现多漆层结构激光除漆过程中, 面漆、 底漆、 铝合金基体3类光谱的快速、 准确识别, 验证了多漆层结构激光可控去除过程LIBS在线监测判定规则的有效性。
4 结 论
以高频(kHz级)纳秒脉冲激光器作为激发LIBS光谱的激光源, 搭建了激光除漆LIBS在线监测平台, 对比分析了实际除漆过程中, 激光去除不同材料(面漆、 底漆、 铝合金基体)时的3类LIBS光谱。 针对高频脉冲激光平面扫描采集光谱的特点(含有较强的连续背景光谱、 半峰全宽约1.5 nm), 对传统均值平滑滤波算法进行了改进, 在去除背景光谱的同时有效避免了特征谱线峰值强度失真。 实际激光除漆过程中, 由于除漆区域存在微区不均匀性, 特征谱线呈现出一定的随机性与不稳定性, 光谱识别难度较大。 采用SVM机器学习算法实现了3类光谱的快速、 准确识别, 进而形成了多漆层结构样品激光可控去除过程的LIBS在线监测判定规则, 结合双层漆样品激光除漆实验, 进一步验证了判定规则的有效性。 研究结果为激光分层可控除漆在线监测提供了有效的判定规则, 可为飞机蒙皮激光分层除漆过程监测及自动化解决方案提供核心技术支撑。
猜你喜欢
机械工程材料(2022年2期)2022-03-02
上海涂料(2021年5期)2022-01-15
上海涂料(2021年5期)2022-01-15
汽车维护与修理(2021年24期)2021-12-23
测试技术学报(2021年3期)2021-06-11
科学咨询(2020年37期)2020-01-06
电子测试(2018年11期)2018-06-26
汽车实用技术(2017年19期)2017-11-01
科学家(2017年17期)2017-10-09
安徽建筑(2016年4期)2016-11-10