非理想条件下MMC-PET 非线性复合控制策略
2023-12-06 01:47程启明孙英豪程尹曼
南方电网技术 2023年10期
程启明,孙英豪,程尹曼
(1.上海电力大学自动化工程学院,上海 200090;2.上海电力公司市北供电分公司,上海 200041)
0 引言
电力电子变压器(power electronic transformer,PET)是指通过电力电子技术及高频变压器的组合的新型电力电子设备,它可实现具有但不仅限于传统的变压器功能,因其具有更灵活更高兼容性的接口。当系统稳定性变化时具有灵活的潮流控制能力,国内学者已将其作为实用案例热点并逐步应用[1-2]。根据研究结果可知电力电子变压器(power electronic transformers,PET)高压侧级联常有以下3种形式的拓扑类型,分别为:模块化多电平变流器(modular multilevel converter,MMC)、级联H 桥以及多电平钳位型,其中MMC 型PET 模块不仅具有拓展简单的优势,且其使用低电压等级器件进行级联时还可增加电平和等效开关的频率并同时减小谐波和降低滤波要求[3-5]。近年来,随着电网中可再生能源大量接入以及电力用户采用非线性负载的增加,配电系统的源端和荷端受到非线性负载的影响呈现出较强的不确定性[6]。由于传统的变压器不具备电压骤降补偿、瞬时电压调节、功率因数校正等能力,已经不能满足电力系统的要求。PET 同时具有体积和重量较小、灵活性强、可进行双向的能量控制等优点,完全可以满足智能电网的要求[7-8]。
文献[9]设计了一种PET 比例谐振(proportional resonance,PR)控制,解决了变压器系统的交叉耦合问题,但其控制策略的抗干扰能力较弱且未具有较好的鲁棒性。文献[10]设计了一种将复合滑模控制方法运用在MMC 孤岛运行模式下的串联结构微电网系统控制方法,该方法改善了输出电压波动问题,并使系统的动态响应和抗负载扰动的能力得到较大的提升,但是该仿真实验较为单一,缺少对电网不平衡工况的仿真。文献[11]提出了一种滑模控制策略,能够完成对MMC 换流器的解耦操作,但是缺少对网侧电压失衡等情况下的讨论。文献[12]将精确反馈线性化应用到单相级联型SST 中,但其对于三相系统不平衡状态下的讨论依旧不足。文献[13]基于状态反馈精确线性化的理论,既顾及暂态的响应速度又顾及系统的鲁棒性,在两者之间取得了较好的平衡,此方法在MMC 结构中具有可行性且动态性能良好,但是分析过程较为复杂,还需优化改进。文献[14]将反步滑模控制运用于PET 的逆变级,此法可以改善系统稳态与暂态的性能。但由于模型参数需要按照严格反馈形式,此控制策略对负载变化的抗干扰性较弱。文献[15]提出一种前馈协调控制策略,将前后级交错以提升系统的动态性能,但由于各级的平均模型并足以应对两级之间的耦合影响,因此模型与实际系统的偏差将被放大,并影响其控制性能。
针对上述问题本文提出了解决方法。首先,对于电网电压不平衡下MMC-PET 的输入级MMC,本文提出将增加系统鲁棒性优势的反馈线性化控制(feedback linearization control,FLC)与改善系统稳态与暂态性能的滑模控制(sliding mode control,SMC)相结合的反馈线性化滑模控制(feedback linearization sliding mode control,FLSMC)策略应用于电流内环控制器[16]。且由于电网电压不平衡时系统会出现大量负序分量,难以满足系统安全运行和动态控制要求,因此设计了以抑制负序电流为目的的正负零序2 倍频环流控制器[17];其次,对于MMC-PET 中间隔离级双向有源桥(dual active bridge,DAB)变换器,采用移相均压的控制策略,进一步减弱输入级直流侧的电压波动[18];最后,在仿真与实验平台上搭建了基于FLSMC 控制策略的MMC-PET 系统模型,并与反馈线性化控制、滑模控制、PI 控制3 种单一控制策略的仿真结果进行比较,实验结果表明,MMC-PET 系统能有效地应对电网不平衡工况,保证系统的可靠性,其输出的电能质量和动态性能良好。
1 MMC-PET的拓扑及数学模型
1.1 MMC-PET的拓扑结构
图1 为MMC-PET 的总体控制结构,图2 为MMC-PET的典型拓扑结构。

图1 MMC-PET总体控制结构Fig.1 General control structure of MMC-PET

图2 MMC-PET典型拓扑Fig.2 Typical topology of MMC-PET
图2 中MMC-PET 的输出侧由三相全桥电压型逆变电路组成。图2 中udcl为直流侧电压,Rd为开关管损耗等效电阻值,Ld为滤波电感,R为无源网络的等效电阻。由图2 可见,MMC-PET 采用了三级式结构组成:输入级(MMC 整流级)、中间隔离级(DAB 变换器)和输出级(三相逆变器)。这种三级式结构具有可控性强、结构较为简单的优点,且此结构具有低压交直流负载、中压直流负载接口,可提高系统利用率和扩大使用范围。
1.2 输入级MMC的数学模型建立
MMC-PET 输入级的功能为高压整流,由MMC 担任,其基本构造如图2 所示。各相单元均由两个结构相同的桥臂构成,各桥臂上都含有N个结构相同子模块(sub module,SM)以及一个桥臂电感[19]。其中桥臂电感的主要功能是降低由于子模块电容电压动荡而产生的相间环流,同时降低直流侧母线出现短路状况时产生的冲击电压[20]。子模块也是MMC 的基本构件和最重要的组成部分,但考虑到传统拓扑结构的半桥子模块构建简单、要求的元器件量较小而且能量耗损也更少,所以本文的子模块主要选用了半桥结构。
图2 中,usj为电网电压;isj为电网电流;uj为换流器侧电压;udc为直流侧电压;R0、L0为网侧等效电阻、电感;Rs、Ls为MMC 桥臂等效电阻、电感;upj、unk为MMC 上、下桥臂电压;ipj、ink为MMC上、下桥臂电流(j、k=a,b,c且j≠k)。
由基尔霍夫电压定理可得MMC 的交、直流侧的数学模型为[21-22]:
由式(1)将桥臂电抗折算,且在平衡控制时电容电压一般波动较小,则可以由式(2)推论得MMC输入级暂态方程为:
其中:
式中:N为每个桥臂中的子模块数量;为第j相桥臂投入的子模块数量的开关控制变量;分别为上、下桥臂第i个子模块第j相的开关函数,i=1,2,…,N。
同样可由式(2)得直流侧电压在abc坐标系下的暂态方程为:
式中:idc为直流侧电流;为直流侧电压期望值;Ceq为上下桥臂的等效电容。
将式(3)进行坐标变换到dq轴坐标系下可得:
式中:usd、usq分别为三相电压在d、q轴上的分量;isd、isq分别为三相电流在d、q轴上的分量;分别为在d、q轴上的分量。
2 电网非理想条件下MMC-PET 输入级内环的反馈线性化滑模控制策略
输入级的总体控制策略采取了内外回路结合的双环控制方式。包括:外环采用定直流电压控制与定无功功率控制有机结合的控制方式,能够输出固定的无功功率值和直流电压,并采用坐标转换技术,将控制信息转化为内环输出电压的参考值;内环控制器可选择不同的控制策略,以提高控制器的动态特性。在此基础上,再辅以载波移相(carrier phase shift,CPS)调制、环流抑制和电容电压均衡控制。
2.1 反馈线性化控制器设计
结合本文MMC-PET 研究对象,本文研究的系统可由非线性表达式表示为:
由李导数的相关定义可得相对阶r1+r2=n(其中,r1、r2分别为输出y1、y2的相对阶),利用坐标变换z=φ(x),使原系统变换为线性。并结合第2节介绍的输入级数学模型,可将系统的输出函数写为:
其中
定义新控制量为:
由式(8)—(10)可以推得线性化系统为:
由式(10)可知,系统完成了线性化和电流解耦。
式(10)也可表示为:
由式(10)—(12)可得原系统输入量为:
需求情况:国内方面,西北地区冬储市场已经启动,价格基本明朗;东北市场多以不定价收款为主。出口方面,长江和云南企业当前仍以出口为主,受人民币汇率影响,企业出口商谈价FOB低端410美元/吨,价格整体高于国内水平,贸易商询单积极性较高。
经过上述变化后,该系统已转变为对v的线性系统。对向量v的控制可由对原向量u的控制直接转变,从而实现了系统的反馈线性化。
2.2 滑模控制器设计
由于在实际情况中,会产生一些不确定的干扰,为提升控制系统本身的控制性能和系统的鲁棒性,降低环境因素对模型性能的影响,选择了使用滑模内环控制器对系统性能进行进一步的改善。
本文选择正负序积分滑模面s为:
式中:sn为滑模面;en为系统的控制误差,e1=e3=udcref-udc,e4=uoref-u0;n=1~4;k11、k12和k21、k22为滑模面控制参数。
出于减弱抖振的考虑,选择指数趋近律与饱和函数相结合的滑模控制律可得式(14)。
式中:s为滑模面;k、ε均为趋近律控制参数(k>0,ε>0)。
饱和函数sat(s)的表达式为:
式中:Δ为滑模边界层厚度;k0=1/Δ。
由式(14)可知选取较大的k值和较小的ε值,可以提高控制器的趋近律并减弱抖振。同时需要判定该滑模存在动态稳定的状态,故:
选择Lyapunov函数V=s2/2,则:
式中:k>0;ε>0;sat(s)s>0。
将系统的误差方程进行极点配置后可以得到系统精确反馈线性化滑模多环积分滑模控制率为:
最终可求得系统的控制输入量为:
2.3 环流抑制以及电容均压控制
当上、下桥臂电压和与母线电压不完全相等时,电感上会产生电压降落,谐波的存在会加大器件开关损耗,影响MMC 运行效率,因此要对环流中的谐波分量加以控制。控制框图如图3所示。

图3 环流抑制控制器结构图Fig.3 Structure diagram of circulation suppression controller
在满足各相电容电压平均值稳定的前提下,加入子模块均压控制,使桥臂上各子模块的电容电压跟踪其参考值,本文结合桥臂电流的方向采用比例调节器以达到每个桥臂内部电容电压平衡的效果。整体控制框图如图4所示。
3 MMC-PET 中间隔离级及输出级的控制策略
由于MMC-PET 输入级只对输出直流电压作了稳压控制而未考虑各DAB 变换器输入电压平衡控制,所以需要采取输入均压控制策略以平衡各子模块传输功率。中间隔离级的控制结构框图如图5 所示。图中,uinn(n=1,2,3)为串联侧子模块的输入电压,、udcL为直流侧输出电压的参考值和测量值,为子模块输入电压的平均值,θ*、Δθ(nn=1,2,3)分别为各子模块移相角的参考值、修正值,控制器最终输出各子模块实际移相比。由于此控制方法的控制较为简单且稳定性较好,能达到较好的均压效果[23]。对MMC-PET 中间隔离级的各个换流器采用输入均压控制策略可有效降低控制的复杂程度。同时在不平衡电网电压下对中间隔离级的整体采用移相调压控制,又可以有效降低MMCPET的输入侧直流电压波动[24]。

图5 中间隔离级控制框图Fig.5 Control block diagram of intermediate isolation level
MMC-PET 的无源负载直接连接至输出侧。由于向无源网络供电需要稳定可靠的交流电压,因此需要对负载侧的电压进行恒定交流电压控制,故外环一般采用恒定直流电压的控制方式。同时在电网故障下,采用恒定无功功率控制,可进一步减小由于电网故障而造成的无功功率波动对电网运行的影响[25]。图6为输出级逆变器控制框图。

图6 输出级控制框图Fig.6 Control block diagram of output level
图6 采用内外环结合的控制方法,其中:外环采用定交流电压、定无功功率控制,并通过坐标变换得到d轴、q轴电流分量的指令值;内环采用电流解耦控制,并通过反变换将得到的输出量vd和vq变成调制波信号。
4 软件仿真分析
4.1 仿真模型参数
为了验证本文提出的将反馈线性化滑模控制(FLSMC)用于MMC-PET 控制的方法的可行性和优越性,本文在MATLAB/Simulink 仿真实验平台上搭建了MMC-PET 控制系统模型,并进行仿真对比。系统仿真实验参数见表1,控制器仿真参数见表2。

表1 系统仿真参数Tab.1 System simulation parameters

表2 控制器仿真参数Tab.2 Parameters of controller
4.1 仿真结果分析
本文设计了3 种非理想工况用以对比佐证,并在这3 种工况下与3 种单一的控制方法即PI 控制(PI)、滑模控制(SMC)、反馈线性化控制(FLC)进行仿真比较,以说明本文所提FLSMC 控制方法的优势。
图7 为系统理想运行时零启动PET 输入级电压变化的波形。通过计算每种控制策略仿真后输入级高压直流电压的超调量、上升时间、调节时间来综合衡量各种控制策略下输入级电压的动态响应性能,其量化计算结果见表3。由仿真结果可见,4种控制方法均可较快的达到设定值,PI控制上升时间较短,但是超调量比另外3 种控制策略更大,FLSMC 控制效果较好,结合了FLC 和SMC 的优点,将上升时间缩短,超调量也相对降低。

表3 系统启动动态性能指标Tab.3 Dynamic performance indicators of system startup

图7 系统零启动时输入级直流侧电压Fig.7 Input level DC side voltage when the system starts atzero
1)工况1:输出级负载突变
在负载变化前,系统负荷的额定有功功率为50 MW,设计在系统稳定运行后在3 s 时投入非线性负载,其额定有功功率为100 MW。
图8 为负荷变化后高压直流侧电压的仿真对比图,其量化计算结果见表4。当输出级负载增加时,高压直流侧电容会提供更大电压,但同时网侧系统控制却还在寻找平衡点,即导致直流侧电压先下降后又在控制环但控制作用下迅速稳定。由图8 可见,FLSMC 的超调量更小、响应速度明显优于其他3种控制。因此,FLSMC的抗干扰能力更强具有较好的鲁棒性。

表4 输出级负载突变时动态性能指标Tab.4 Dynamic performance indexs when output level load changes

图8 输出级负载突变时高压直流侧电压Fig.8 High-voltage direct current side voltage when output level load changes
图9 为输出级负载发生变化时的系统仿真波形。其中:图9(a)、(b)、(c)分别为a 相位子模块电容电压、MMC 的相间环流、PET 输入级的功率;图9(d)、(e)、(f)为负荷变化前后输出级波形。图10为负荷变化后网侧正序电流dq轴分量对比图。

图9 输出侧负载突变时系统仿真波形Fig.9 Simulation waveforms when output stage load changes

图10 输出级负载突变时网侧正序电流dq轴分量Fig.10 Grid-side positive sequence current dq-axis component when the load of output level changes suddenly
由图9 可见,投入负载后MMC-PET 输入级相间环流变化幅度较小,且子模块电容电压也可以很快稳定,波动幅度也在额定值12%以内。PET 输入级的功率也可以快速地跟随期望输出值而变化,且抑制了负载变化对输入级无功功率的影响。
由图10 可见,非线性复合控制策略的内环电流的动态响应明显优于传统的PI控制,中间隔离级低压侧电压受到了有效的控制,该控制有效地抑制了输出直流电压的波动;且使输出侧的有功功率和无功功率可以更快地稳定达到期望值。
2)工况2:三相不对称电压故障
由于电网运行中电压会发生波动等情况,为验证电网电压波动情况下本文提出的控制策略的有效性和优越性,考虑到在实际情况中电网常见的故障为电压单相跌落,设计在电网稳定运行至3.5 s时a相电压发生幅度为40%的跌落,持续0.2 s后消失。图11为在电压发生波动时系统仿真波形,其中:图11(a)、(b)、(c)、(d)分别为输入级交流侧电压、相间环流、PET输入级直流侧电压、PET输出级功率。
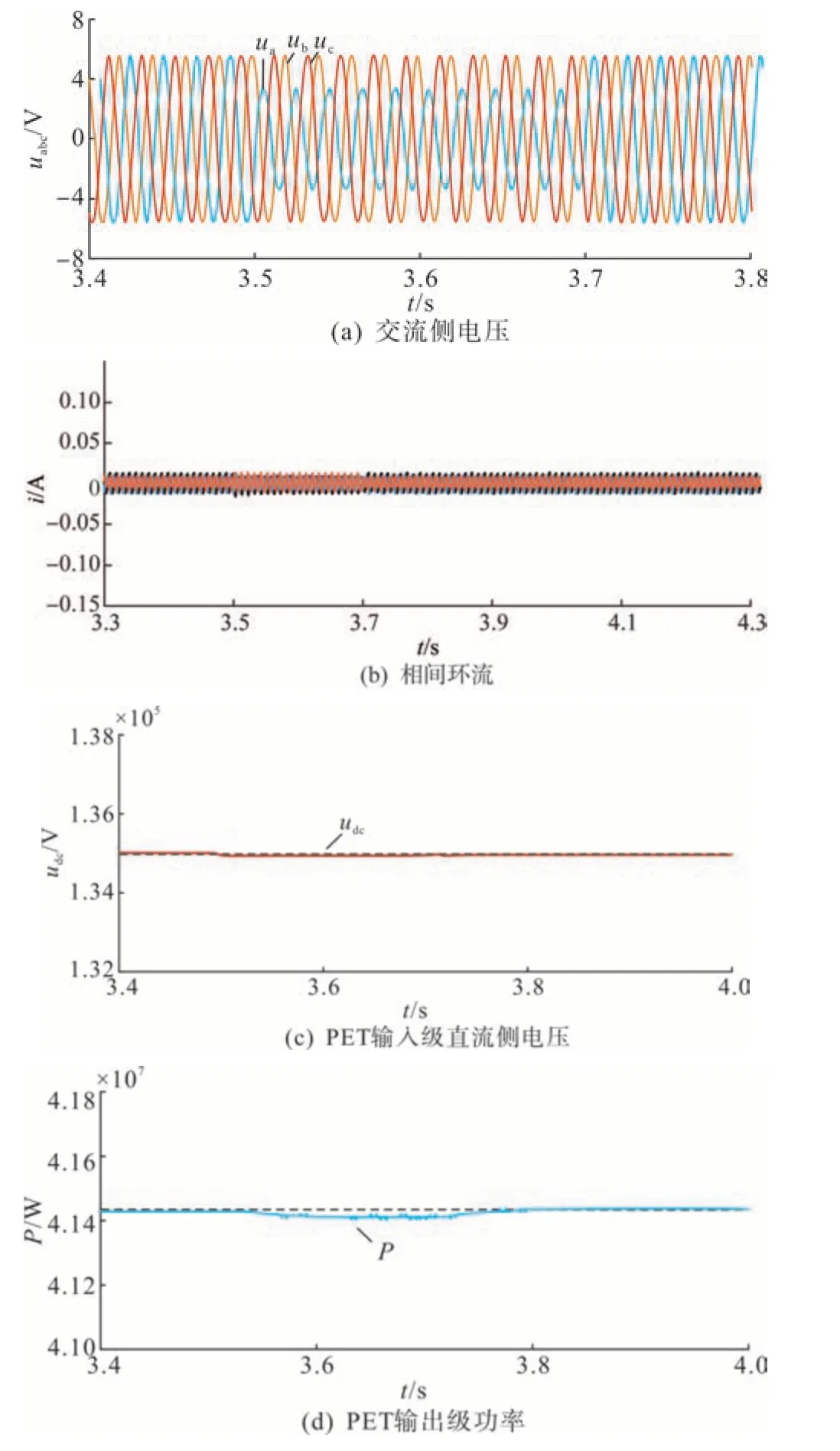
图11 电压单相跌落时系统仿真波形Fig.11 System simulation waveform when single-phase voltage drop
由图10 可见,输入级的相间环流控制器可以快速有效地抑制环流的2 倍频波动,控制效果较为明显。输入级直流变化幅度较小,仅仅下降了0.43%,可见在电网发生单相跌落状况时,本文提出的控制策略可以提供良好的控制效果来稳定电压。输出的无功功率紧紧跟随期望值0 Var,有功功率也只产生了最大1.2%的波动,并且在电压恢复后的0.05 s 内重新稳定于设定值。可见该控制策略可以有效抑制电压波动对输入电压和输出有功无功功率的影响。
图12 为4 种控制效果在3.5 s 附近的网侧电压电流仿真波形的FFT 分析比较图,其中:图12(a)、(b)分别为电网侧电压、电流的仿真波形。由图可见,使用本文提出的复合控制策略后系统的波形拥有最低的电压和电流谐波含量,FLSMC 控制的网侧电压谐波含量分别比滑模控制、反馈线性化控制和PI控制低0.5‰、1.1‰和0.9‰。网侧电流谐波含量分别比滑模控制、反馈线性化控制和PI控制低0.35‰、1.2‰和4.34‰。因此在暂态过程中本文所提FLSMC 控制策略有着良好的动态性能且可以较好地抑制谐波产生。

图12 网侧电压电流仿真波形的FFT分析Fig.12 FFT analysis of grid side voltage and current simulation waveforms
3)工况3:三相对称电压故障
为了验证在电网运行时候发生故障时本文提出FLSMC 控制策略依然具有其有效性和优越性,设计了电网侧三相电压在3.5 s 时发生暂降30%的故障,故障持续0.2 s后消失。
在电网侧电压暂降至额定电压的70% 时,MMC-PET运用4种不同控制策略的仿真情况对比如图13 所示,其中:图13(a)、(b)为电网侧电流对比、高压直流侧电压对比。各种控制策略下高压直流侧电压的动态响应性能,其量化计算结果见表5。

表5 三相电压故障时动态性能指标Tab.5 Dynamic performance indexs under three-phase voltage failure

图13 三相电压故障时系统仿真波形Fig.13 System simulation waveforms in case of three-phase voltage failure
由于在电压发生三相电压暂降故障时导致网侧功率下降,因此直流侧电压也会相应的下降。但是由于系统采用了内外环双环控制,外环为了使直流电压始终保持为额定电压,就会使提供给内环的电压参考值升高,来保持内环迅速跟踪参考值直至稳定。此时网侧电流会暂时增大以补偿三相电压暂降,使得网侧功率重新维持至平衡。
由图13(a)可见,本文提出的控制策略相较于PI和FLC控制电网侧电流的波动更小,在电压恢复后可以更快地使网侧电流恢复稳定,且电流的波动更小,对电流突变的抑制能力更强。
由图13(b)可见,PI 控制的波动性较大;滑模控制和反馈线性化控制的超调量较大,且不能迅速调节;而本文提出的复合控制有抗干扰能力更强、响应速度更快、并且可以在更小的超调量下更快地进入平衡状态。
图14 为发生电压暂降故障后系统的仿真波形,其中:图14(a)、(b)、(c)、(d)分别为交流侧电压、相间环流、中间隔离级低压直流电压、PET 输出级功率。

图14 发生暂降故障后系统的仿真波形Fig.14 Simulation waveform of the system after a transientfailure
由图14 可见,交流侧电压降至70%时,环流抑制较为明显,相间环流波动较小,稳定速度快;中间隔离级输出的低压直流电压稳定,未产生较大波动;PET 输出功率最大变化幅度仅为-3‰。因此,本文的控制策略有效地抑制了电压暂降故障时对输出功率和输入级输出电压的影响。
图15为发生暂降故障时4种控制方法网侧功率波形的对比。在电压骤降和电压重新恢复时,本文提出FLSMC 控制具有比另3 种控制方法更小的超调量,并拥有比滑模控制和反馈线性化控制更快的响应速度,可以在更短的时间内使功率重新恢复稳定。

图15 发生暂降故障后网侧功率变化对比Fig.15 Comparison of power changes at the grid side after transient drop fault occurs
5 半物理实验分析
本文通过RT-LAB 半物理实验平台对所提出的应用于MMC-PET 的反馈线性化滑模控制(FLSMC)策略进行了仿真对比验证。利用RT-LAB 实验平台对控制系统进行建立,包括但不限于交流电网,输入侧MMC 整流器、中间隔离级DAB、输出侧逆变器和实验所必须的电感电阻等,并由dSPACE 控制器进行调制与控制策略的实现,如图16 所示。dSPACE 控制器中含有DS1103ADC 用于读取MMC-PET 电压、电网电压和电网电流。DS1103 DAC用于测量参数,DS1103SLDSP用于生成PWM信号以实现调制。DS1103 是一种适用于逆变器控制的控制器板,可实现硬件与软件仿真环境之间的连接,实现算法、编译算法并转换成C 语言代码,然后加载到实时dSPACE 处理器上。RT-LAB 驱动系统将MMC-PET 模型加载到配置有研究所需的I/O接口的实时仿真平台上。

图16 基于RT-LAB的MMC-PET半物理实验平台示意图Fig.16 Sketch diagram of MMC-PET semi physical experiment platform based on RT-LAB schematic diagram
考虑到在实际情况中电网常见的故障为电压单相跌落与输出级负载突变,故选取工况1、2 相结合作为典型工况进行仿真,即:设计在负载变化前,系统负荷的额定有功功率为50 MW,3 s 时投入非线性负载,其额定有功功率为100 MW。在3.5 s 时a 相电压发生幅度为40%的跌落,持续0.2 s后消失。
图17 为发生不平衡工况时MMC-PET 网侧功率,图18 为输入级正序d轴电流,图19 为整流侧输出电压、图20为网侧A 相电流对比图。表6为图17、图20的动态性能指标。

表6 动态性能指标Tab.6 Dynamic performance indicators

图17 网侧功率Fig.17 Power at the grid side

图18 网侧输入级正序电流d轴分量Fig.18 Grid-side input level positive sequence current d-axis component

图19 整流侧输出电压Fig.19 Output voltage of rectifier side

图20 网侧A相电流Fig 20 Phase A current of grid side
由图17—20 可见,虽然PI 控制上升时间较小,但其具有较大的超调量和调整时间而由FLSMC 控制的系统响应更为迅速,鲁棒性也更强,且由表6可知该控制亦可以较好地抑制谐波的产生。综上,由基于Simulink 仿真和RT-LAB 实验平台的MMCPET 半物理仿真实验可知,FLSMC 控制策略应用于该系统具有显著的优势。
6 结论
本文以模块化多电平换流器-电力电子变压器(MMC-PET)为研究对象设计了一种反馈线性化滑模控制(FLSMC)策略,且在3种电网非理想运行的工况下研究其控制效果,并通过仿真与实验将本文提出的控制策略与3 种单一的控制策略(PI 控制、滑模控制、反馈线性化控制)进行对比,并得到以下结论。
1)在电网非理想条件下运行时,电网侧的电流也会出现三相不平衡,有功功率和无功功率都会出现脉动等情况,对电能质量有着严重影响。本文提出反馈线性化滑模控制策略相较PI控制具有响应快速、谐波畸变率低、鲁棒性强等特点。
2)在电网非理想情况运行时,反馈线性化滑模控制相比3 种单一控制具有更好的动态性能和更强的抗干扰能力,提高了系统在电网不平衡下的不间断运行能力,且明显提升前后传递的一致性。
猜你喜欢
中等数学(2020年2期)2020-08-24
山东冶金(2019年3期)2019-07-10
中国惯性技术学报(2019年6期)2019-03-04
测控技术(2018年4期)2018-11-25
测控技术(2018年3期)2018-11-25
测控技术(2018年9期)2018-11-25
消费导刊(2018年10期)2018-08-20
北京航空航天大学学报(2016年7期)2016-11-16
光学精密工程(2016年3期)2016-11-07
通信电源技术(2016年1期)2016-04-16