大容量海上风电机组故障穿越电磁暂态模型辨识方法
2023-12-06 01:47:40王诗超崔浩瀚陈雅皓晁璞璞金小明李卫星
南方电网技术 2023年10期
王诗超,崔浩瀚,陈雅皓,晁璞璞,金小明,李卫星
(1.中国能源建设集团广东省电力设计研究院有限公司,广州 510663;2.大连理工大学电气工程学院,辽宁 大连 116024)
0 引言
全功率型风力发电机组作为当前风电市场的主流机型之一,具有转化效率高、功率解耦等优点,能够实现变速恒频发电,并且具有深度进相运行和良好的稳定运行能力[1-6]。目前,风电机组制造商建立了比较完善的电磁暂态模型,可以描述风电机组在故障状态下的动态响应。但是,出于对知识产权的保护,用户所得到的模型都是“黑箱”模型,通常很难从厂家所提供的设备铭牌或手册中获取到全部的模型参数,严重影响了风电并网研究的发展。鉴于此,基于风机的黑盒模型,辨识出机组的电磁暂态模型具有重要的理论价值和现实意义[7-9]。
目前,国内外对全功率型风电机组的建模已做了大量研究。以西部电力协调委员会(Western Electricity Coordinating Council,WECC)为代表的国际标准化建模工作组,为更好地服务风电的并网分析,先后提出了两代通用化风机机电暂态模型[10-11],并给出通用正序控制逻辑以模拟实际厂家的机组特性,但其将风电机组的发电机和变流器等效为受控电流源,该模型仅适用于对称工况下的机电暂态仿真。文献[12-13]介绍了风电机组不同的仿真模型,并用受控电压源代替逆变器开关建立了简化的电磁暂态仿真模型,由于其忽略开关频率动态,该模型无法仿真风电机组在开关频率附近的电磁暂态特性。文献[14-17]基于某实际风电机组,针对低电压穿越工况建立其电磁暂态模型,但未提及高电压穿越的适应性。
综上,现有的建模方法多针对3 MW 以下小容量机组在典型电压跌落工况的模拟,很少同时涉及不同运行点下各种电压扰动工况的全面模拟和验证。随着大容量海上风电机组的规模化投建与并网,和实际高/低电压穿越响应特性一致的风电机组电磁暂态模型的缺失将严重阻碍未来海上风电的并网控制及消纳。为克服这一问题,论文基于某型号大容量海上风电机组“黑盒”模型,将机组模型分为主电路和控制电路两个部分,提出其电磁暂态模型的通用建模方法。通过与实际机组低、高电压故障穿越全过程响应特性的对比发现,本文建立的大容量海上风电机组电磁暂态模型具有较高的模拟精度。
1 大容量全功率型风电机组的黑盒模型
风电机组的黑盒模型能够描述机组在不同工况下的动态响应,但通常仅包括基本主电路拓扑及部分参数,隐藏了具备商业机密的主电路参数、控制电路逻辑及其全部参数,如图1所示。

图1 某大容量全功率风电机组黑盒模型Fig.1 Black-box model of a large-scale full-power wind turbine
该黑盒模型展示了该型号机组经由两个中性点钳位式三电平变流器接入机端变压器并网,用理想电源替代了具备商业机密的风力机、传动链、发电机部分,隐藏了变流器的具体结构和调制方法、控制电路的逻辑及参数。针对这一现实问题,本文提出了大容量海上风电机组电磁暂态模型的辨识方法,包括主电路模型辨识、控制电路模型辨识和模型验证3个关键步骤。
2 大容量全功率风电机组的主电路模型辨识
2.1 主电路拓扑辨识
通过对多型号大容量海上风电机组技术说明书的调研分析,本文提出的大容量全功率风电机组的通用主电路拓扑如图2 所示。风力机带动永磁同步发电机发出与转速同频率的交流电气量,经过由两个中性点钳位式三电平变流器(neutral point clamped,NPC)并联组成的机侧变流器连接至直流侧,以有效分流,减轻变流器工作压力,提高风机传输功率。接着,直流侧经两个NPC并联组成的网侧变流器,向电网发出与电网同频率的交流电气量。下面将对各部分依次介绍。

图2 主电路拓扑Fig.2 Main circuit topology
2.2 典型半直驱旋转系统
大容量海上全功率型风电机组的旋转系统一般由风力机、齿轮箱和永磁同步发电机组成,属于典型半直驱系统,其中风力机的数学模型如式(1)—(3)所示。
式中:Tt为机械转矩;Ωt为转速;ρ为空气密度;R为风力机叶轮半径;V为风速;λ为叶尖速比;Ct为转矩系数;Cp为风能利用系数。
齿轮箱的数学模型如式(4)—(5)所示。
式中:N为齿轮箱变比;Ωt_ar、Tt_ar分别为高速轴的旋转速度和传动转矩。
永磁同步发电机是全功率型风力发电机组中把机械能转化为电能的核心转化装置[18],本文采用同步旋转坐标系下dq轴数学模型,其定子方程可表示为:
式中:uds和uqs为定子电压的dq轴分量;ids和iqs为定子电流的dq轴分量;Rs为定子电阻;Lds和Lqs为定子dq轴电感;ψf为永磁体磁链;ωe为同步转速。
dq坐标系下的电磁转矩方程可以表示为:
式中:np为极对数;ψds和ψqs为定子磁链的dq轴分量。值得提及的是,此部分风力机模型可以在微秒至秒级的电磁暂态分析中不考虑,但如果要模拟风速变化时机组的机电响应特性,则必须包含。
2.3 中性点钳位三电平背靠背变流器
与小容量风电机组所采用的经典两电平变流器不同,大容量海上全功率风电机组一般采用如图3 所示的中性点钳位式三电平变流器(NPC)。该变流器因包含3 种电平(0、Vbus/2 和Vbus)、中性点及各桥臂之间采用钳位二极管连接而得名,通过控制12 个可控开关的通断得到想要的电压。它有两个直流电容,其开关器件只承受一半的直流母线电压,其输出电压和功率等级将比两电平变流器高很多,因此常用于大容量海上全功率型风电机组。
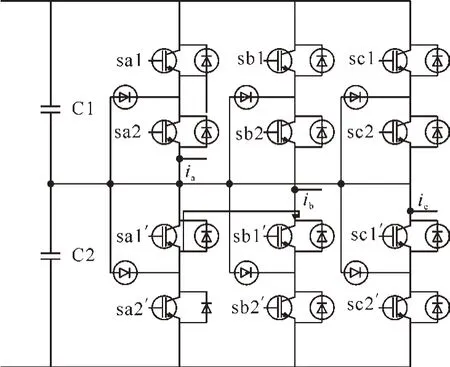
图3 中性点钳位三电平变流器Fig.3 Neutral clamp three level converter
值得提及的是,NPC 在半个工频周期内,通过正弦脉宽调制(pulse width modulation,PWM)和空间矢量调制(space vector pulse width modulation,SVPWM)时,上下桥臂只有一个开关互补交替通断。因此,本文搭建的模型采用基于PWM 的双载波反向调制,如图4所示。
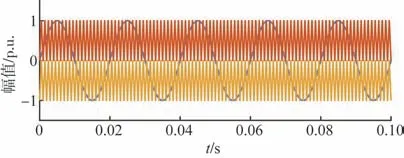
图4 双载波反向调制Fig.4 Dual carrier reverse modulation
通过该方法,PWM 可以通过注入三次谐波获得和SVPWM 一样的电压利用率,对实际风机控制器的计算能力要求较小。
2.4 保护电路
主流风电机组的保护电路通常采用撬棒电路(Crowbar)或制动斩波器(Chopper)。Crowbar 的缺点是只能短时间投入,并且投入时需要闭锁变流器,此时的控制器失效,短时间无法提供足够的无功功率以支撑电网电压恢复。
Chopper 连接在直流母线的两端,用来维持直流母线电压避免失控或升高。通常由一组开关器件搭配卸流电阻组成,是目前大部分全功率风电机组所采用的保护电路形式。其控制逻辑如图5 所示,通断由滞环控制逻辑实现,通过判断直流母线电压大小来决定Chopper的启用与否。

图5 Chopper电路的控制逻辑Fig.5 Control logic of the chopper circuit
值得提及的是主电路的参数辨识已有较多文献研究[19-21],本文不再赘述。
3 大容量全功率风电机组的控制电路辨识
3.1 网侧变流器控制器
网侧控制器的主要功能是维持直流电压的控制与稳定、向网侧注入无功电流。直流电压控制的关键在于有功功率的平衡。当采用电压定向建模时,d轴与有功功率相关,q轴与无功功率相关,电网电压的q轴分量为0;当采用坐标等幅变换时,电网电压d轴分量与相电压峰值相等。网侧变流器交流电压可由式(8)表示。
式中:vdg和vqg分别为变流器出口电压的dq轴分量;idg和iqg分别为网侧电流的dq轴分量;Rg和Lg分别为网侧电阻、电抗;ωs为同步速。
加入PI 控制并且对dq轴耦合项加入解耦前馈输入edg和eqg如式(9)所示:
可得如图6所示的控制框图。

图6 网侧控制器Fig.6 Grid side controller
如图6 所示,通过d轴定向电网电压来控制d轴分量来实现直流母线电压控制,通过控制q轴分量来实现无功功率控制,从而实现dq轴解耦。另外,图6中的常数项为:
3.2 机侧变流器控制器
机侧控制器采用功率外环电流内环的双闭环矢量控制策略,其主要功能是有功功率控制并向直流侧注入无功电流。有功功率参考值与实际值的差值经过PI控制器的调节作为d轴电流ids的参考值,接入电流内环。无功功率同理。
忽略发电机定子电阻,式(6)中永磁同步发电机的电压电流动态方程可以改写为式(11)。
在旋转坐标系下永磁同步发电机有功功率Ps和无功功率Qs可以由式(12)计算。
加入PI控制并且耦合项加入解耦前馈输入,可得如图7所示的控制框图。

图7 机侧控制器Fig.7 Rotor side controller
3.3 中性点电位平衡控制器
背靠背NPC变流器具有输出谐波性能好、传输容量大、可承受的电压等级高等优点,被广泛应用于大容量风电机组。但是NPC双电容结构会引发中性点电位不平衡,给变流器的稳定运行带来不利影响。图8为单侧NPC变流器电路。

图8 单侧NPC变流器电路Fig.8 One sided NPC converter circuit
如图8所示,中性点电流方程为:
式中:i1和i2分别为上下电容电流;U0为上、下电容电压的差值。
联合图8 和式(13)可知,当NPC 工作在中性点流经电流inp的工况时,电容电流i1和i2的差值不为零,上下电容电压不平衡,将使得风电机组输出波形产生畸变,电能质量和系统效率降低。
本文通过在调制波中注入零序电压的方法来解决NPC 中性点电位不平衡的问题,见式(14)—(16)。
式中:C为直流电容;Udc1和Udc2分别为上、下电容电压;Ts为控制器采样时间;ia、ib和ic分别为变流器出口三相电流;va、vb和vc分别为三相调制波;在直流母线电压为2 100 V 的NPC 变流器系统中进行测试,测试结果如图9所示。

图9 零序电压控制效果Fig.9 Zero sequence voltage control effect
由图9 可以看出,加入零序电压控制前,NPC两电容之间的电压差接近700 V,中性点电位明显不平衡;加入零序电压控制后,上、下母线电压均为1 050 V,中性点电位不平衡的现象被有效抑制。
3.4 故障穿越控制器
3.4.1 低电压穿越控制器
经调研,全功率型风电机组有功功率、无功功率的通用低电压故障穿越响应曲线如图10所示。
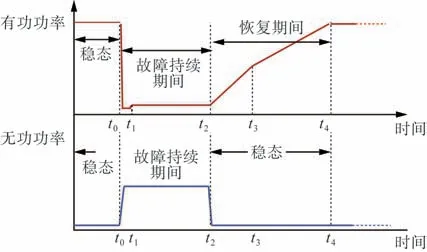
图10 低电压故障穿越全过程的功率响应曲线Fig.10 Power response curves during the LVRT processes
由图10 可知,0—t0时段风电机组运行在稳态工况,风机注入电网的无功功率一般维持在0 左右,有功功率根据风速的不同运行在转速控制、最大功率追踪控制、功率控制等稳态控制策略。
当电网在t0时刻发生短路故障,风电机组检测到系统电压下降到阈值以下,切换到低电压穿越控制逻辑。根据我国并网标准[22-25],风电机组在发生低穿故障后需要具备向电网注入无功电流以支撑电网电压恢复的能力,无功电流需要根据电压跌落深度进行调节。
式中:us为端电压;为故障期间无功电流的参考值;kqL为低电压穿越无功支撑系数;us_set1和us_set2为无功电压阈值;In为机组的额定电流。
根据我国并网标准,式(17)中的取值可设置为:
为保证在故障期间风电机组可以有效发出无功功率以支撑电网电压,主流机组多采用无功功率优先控制,即有功电流受到无功电流的出力限制。
在t2时刻故障切除,电压恢复到故障前的水平。此时无功功率大多瞬间恢复到稳态水平。而有功功率主要分为两种:瞬间恢复到故障前的水平或以一定的恢复速率缓慢上升。其中以一定速率恢复的有功电流参考值为:
式中:t为仿真时间;t0-t4分别对应图10 中x轴时刻;k1和k2分别对应t2-t3和t3-t4时刻有功功率恢复斜率;ip_fault为故障期间有功电流ip的参考值。
综上,低电压穿越工况的故障控制电路可总结为图11。
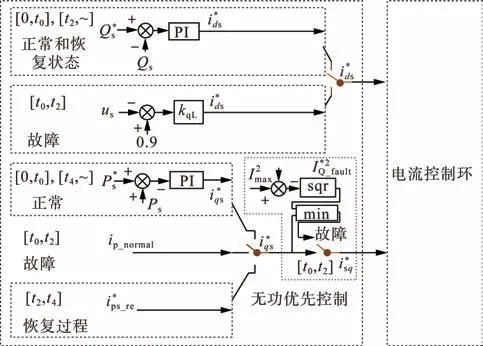
图11 低电压穿越控制电路Fig.11 LVRT control circuit
3.4.2 高电压穿越控制器
类似地,风电机组有功功率、无功功率的高电压故障穿越响应曲线如图12所示。

图12 高电压故障穿越全过程的功率响应曲线Fig.12 Power response curve during the HVRT processes
由图12 可知,0—t0时段风电机组运行在稳态工况,风机注入电网的无功功率一般维持在0 左右,有功功率根据风速的不同运行在转速控制、最大功率追踪控制、功率控制等稳态控制策略。
当电网在t0时刻发生高电压故障,风电机组检测到系统电压上升到阈值以上,切换到高电压穿越控制逻辑。根据我国并网标准,风电机组在发生高穿故障后,需要向电网吸收无功电流以降低电网电压升高带来的影响,无功电流需要根据电压升高程度进行调节:
当在t2时刻短路故障切除,电压恢复正常。此时有功功率、无功功率在故障切除后的瞬间恢复到稳态水平。综上,高电压穿越故障控制电路如图13所示。

图13 高电压穿越控制电路Fig.13 HVRT control circuit
3.4.3 负序分量控制器
当电网电压不平衡时,风电机组的输出功率存在2 倍电网频率的谐波功率,如式(22)所示,2 倍频率的谐波功率也同样会带来直流侧母线电压的2倍频率波动。
式中:P0和Q0分别为有功无功直流分量;P1和P2分别为有功功率倍频分量幅值,Q1、Q2同理;负序控制可在原控制逻辑的基础上将ωs乘以-1 单独控制,根据需要即可消除负序分量,较为简单,其难点在于负序分量的提取。本文提供两种简单有效的负序分量提取方法:陷波器法和延时相消法。
陷波器分离负序分量利用的是正序分量在负序dq坐标系下为2 倍频分量的原理,使用陷波器将正序的2 倍频分量滤除即可得到负序分量,基于二阶传递函数的陷波器为:
式中:ωn为固有频率;ξ为阻尼系数。
延时相消法的实现式如式(24)所示。
式中:Tg为工频周期;α和β为Clarke 变换的上标。值得注意的是,在使用延时相消法前需要将交流信号进行Clarke变换。
使用两种方法对一组包含负序幅值为5 的三相交流信号分离其负序分量,效果如图14所示。
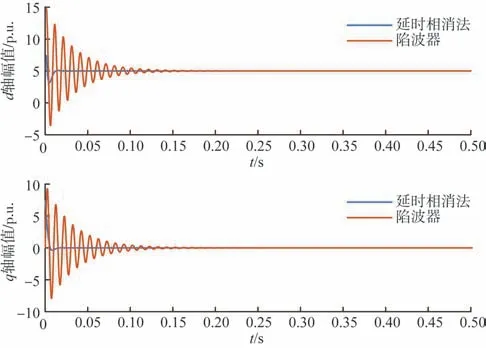
图14 两种负序分离方法的结果对比Fig.14 Comparison of results of two negative order separation methods
由图14 可以看出,延时相消法相较于陷波器,提取负序分量速度更快,振荡更小,效果更好。但是二者都在0.1s以内快速稳定地分离出负序分量,均满足控制要求,但是陷波器因其简单有效,被大部分实际风机控制器使用。为确保通用性,本文同时提供了以上两种主流负序分离方案,可按需灵活选择。
3.5 控制电路参数辨识
基于第3 节中式(8)—(24)机组黑盒模型低、高电压的故障穿越响应特性解析,本文提出了如图15所示的分段参数辨识方法。
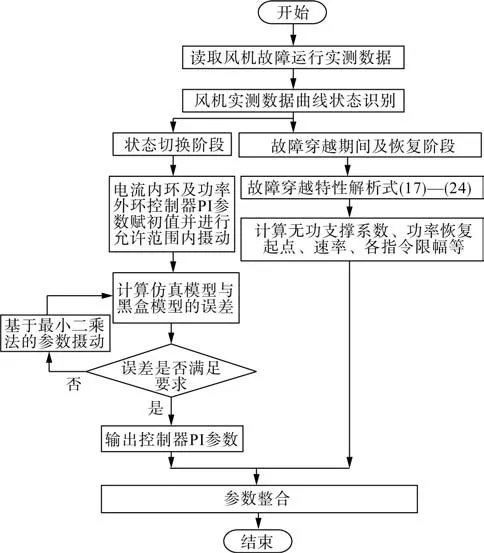
图15 控制参数的辨识流程Fig.15 Identification process of control parameters
如图15 所示,该方法基于机组黑盒模型低、高电压的故障穿越响应测试曲线,识别出模型参数与机组特性的映射关系,用特性解析公式计算出控制器的指令生成器参数,用状态切换过程辨识出控制器的PI参数,方法简单实用,原理清晰。
4 仿真验证
本文以某厂家提供的基于PSCAD 平台的8.3MW 黑盒模型为基准,建立了大容量风力发电机组仿真模型,如图16所示。

图16 某大容量机组仿真模型Fig.16 Large capacity wind turbine simulation model
依照标准[22-25]中规定的测试工况,对黑盒模型进行三相、两相、大风、小风、低穿以及高穿共计32 种工况进行测试(详见表1、2),随后对仿真模型进行同样工况的测试,其误差计算公式如下。

表1 电压跌落工况Tab.1 Voltage drop conditions

表2 电压升高工况Tab.2 Voltage rise conditions
式中:n为采样点数;xsim和xmea分别为模型验证电气量的仿真数据和测试数据基波正序分量的标么值。
平均偏差为:
式中N为采样总数。平均绝对偏差为:
最大偏差:
加权平均绝对偏差:
式中下标pre、fault 和post 分别表示故障前、故障期间及故障后。
最严重的2 种工况下,与黑盒模型的响应特性对比如图17所示,误差对比如图18所示。

图17 厂家黑盒模型与仿真模型结果对比Fig.17 Comparison of black-box model and simulation model results
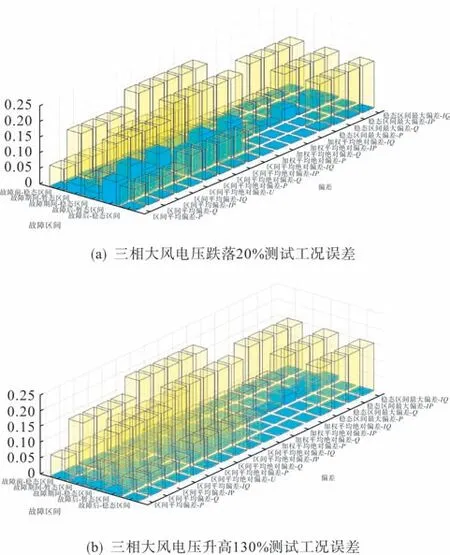
图18 厂家黑盒模型与仿真模型结果误差Fig.18 Error of black-box model and simulation model results
图18 中,黄色代表标准规定的最大误差,青色代表厂家黑盒模型与仿真模型的误差,由图17和18 可知,采用本文提出的模型构建方法,其仿真误差远小于标准规定误差,证明了方法的有效性。
5 结语
本文建立了大容量全功率型风电机组的主电路和控制电路架构。主电路方面,设计了大容量风电机组特有的背靠背并联式NPC变流器,提出了实用NPC中性点电位平衡控制及调制方法;控制电路方面,设计了适用于大容量风电机组对称和不对称电压故障穿越过程的控制逻辑。
本文提出了基于机组故障穿越特性的模型参数分段辨识方法,解决了目前的建模方法多针对小容量直驱型两电平变流器,不适用于大容量机组的问题。通过实际厂家黑盒模型与所建立仿真模型的故障穿越响应特性对比,证实了本文方法在模拟实际机组低/高电压故障穿越响应特性方面有良好的效果,能够为大容量海上全功率型风电机组的并网控制提供模型基础与分析依据。
猜你喜欢
网络安全与数据管理(2022年1期)2022-08-29 03:15:16
酒·饮料技术装备(2018年1期)2018-04-28 09:09:06
工业设计(2016年7期)2016-05-04 04:01:00
电测与仪表(2016年8期)2016-04-15 00:30:16
通信电源技术(2016年4期)2016-04-04 02:57:12
中国科技信息(2015年6期)2015-11-10 03:35:44
电测与仪表(2015年16期)2015-04-12 00:44:34
电子设计工程(2015年6期)2015-02-27 12:05:13
电测与仪表(2014年19期)2014-04-04 12:06:22