铁路贯通装卸线下沉式移动接触网结构及可靠性研究
2023-11-25 08:08:00杨隽睿于晓英刘名军
西北师范大学学报(自然科学版) 2023年6期
杨隽睿,于晓英*,刘名军,马 双,苏 洋
(兰州交通大学 自动化与电气工程学院,甘肃 兰州 730070;2.乌鲁木齐铁路局运输部,新疆 乌鲁木齐 830011)
铁路货物运输运量大、速度快、成本低,一般不受气候条件限制,适合大型、笨重货物的长途运输[1].大型的铁路货运列车需要在铁路装卸站场进行装卸搬运作业或者检修作业,传统的铁路装卸采用内燃机车牵引货车进出装卸作业区,这种方式需要更换牵引机头,并专门配置人员来维护内燃机组,工作效率低,维护成本高,造成资源浪费,遇到重载列车,还需要多台内燃机车才能满足牵引需求[2].
随着电气化铁路运输技术的发展,为提高铁路货运装卸作业效率,减少内燃机车取送车、调车作业造成的时间、机力、人力浪费,铁路干线运输倾向于采用电力机车取代内燃机车在货物装卸线路或入库检修实现电气化,这就需要在货运站场安装可移动的接触网,对装卸线采用电力贯通设计,以实现货运列车的直进直出[3].在货运列车进站或者出站的时候,由移动接触网对电力机车进行供电,当货运列车驶入站点进行装卸作业时,移开接触网方便装卸作业[4].但是,在采用固定接触网的电力贯通装卸线上,由于车箱上方空间不足,在装卸大型货物时,不满足安全限界要求,无法完成正面吊等大型装卸作业.基于以上因素,急需研究适用于贯通式装卸线的可移动接触网,以实现将接触网横移后下沉至车体底部或地面以下高度,解决装卸效率及安全距离问题[5].
国内外现有的移动接触网主要分为刚性和柔性.刚性移动接触网易受天气、温差等因素影响,只适合库内使用,且维护量大、故障率高、实用性较差[6].柔性移动接触网悬挂模式与固定接触网一致,弓网过渡更平滑、造价低、故障率低[7].现有的平移式柔性移动接触网可在装卸作业进行时将接触悬挂平移至支柱侧,龙门吊作业时,因施工工艺及热胀冷缩等因素的影响,处于非工作位的承力索、接触线及接触网支柱均可能会碰撞货物,存在安全隐患[8].
随着电气化铁路技术的革新,铁路货物运输任务不断增大,迫切需要一种结构可靠、便于安装和维护且能够有效克服现有技术缺陷的移动式接触网,彻底解决装卸效率及安全距离问题[9].为实现上述目的,文中设计了一种适用于铁路贯通装卸线的下沉式柔性移动接触网并完成了相关试验.该装置可支持电力机车带电驶入、驶出货物装卸区域,机车通过后,断开移动接触网电源,并控制接触网与支柱一起下沉至地面或基坑,在车辆上方留出充足的装卸作业空间,可有效避免货物或者装卸设备碰撞到承力索、接触线,为货物装卸提供安全保障.列车驶离后,再将支柱和接触悬挂上升后移回至机车上方工作位置,保证列车驶入与驶出时接触网与受电弓的可靠接触.该装置结构可靠,能够保证移动接触网的正常运行,可以有效解决货场装运问题,大大提高铁路货运装卸线作业效率,避免安全侵限问题,提高经济效益及社会效益.
1 下沉式移动接触网的结构
1.1 下沉式移动接触网的技术要求
作为货场特殊结构装备,移动接触网应满足整体性、同步性、安全性及可靠性等要求,具体要求如下:
1)移动接触网与两侧固定接触网在机械和电气上应能稳固衔接,受电弓能在二者之间平滑过渡;
2)移动段接触线的张力分布应尽量均匀,减少硬点的数量,降低弓网离线率[10];保持导高、拉出值、限界在规定范围内,且不会发生钻弓、打弓、刮弓、线夹松脱等现象;
3)移动接触网应动作灵活,在工作位和非工作位间转换时,能实现各腕臂整体、同步移动,同时在移动过程中不得形成接触线工作面扭曲,不发生卡滞现象;
4)移动接触网应在电气上形成一个独立分段,既可以保证处于工作位时为机车供电,又可以保证检修时不影响两侧固定接触网正常工作.
1.2 下沉式移动接触网的结构设计
移动接触网系统从空间位置分布上分为室内及室外部分.室外部分指架设于线路上方的露天可移动接触网设备,室内部分位于控制室内,用于操控室外移动装置的控制台.
1)室外部分
针对不同货场设计的下沉式移动接触网纵向尺寸不一,视货场规模而定,主要由门型架、支柱、移动机构、接触线及两侧驱动坠砣组成,如图1所示.
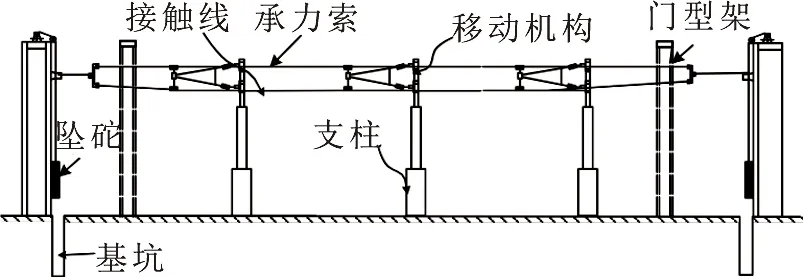
图1 移动接触网室外部分
门型架具有一定的机械强度,为两侧固定接触网提供下锚支撑;支柱为移动接触网提供高度,同时支持移动接触网从线路上方收回后下沉至地面或基坑;移动机构实现接触线从线路上方转动收回至支柱侧;移动接触网两侧的坠砣通过各自侧的驱动机构控制其上升或下降,用于补偿移动接触线的张力,可有效防止断线、卡滞等现象的发生.
2)室内部分
移动接触网的室内部分主要指控制台.室内控制台用于控制室外移动接触网部分在工作位和非工作位之间的位置切换,同时能在紧急情况下控制移动接触网迅速停止运动.控制台上设有系统启动、系统急停、油缸上升、油缸下降按钮,并设有相应的指示灯,通过相应控制按钮可以控制移动接触网的移动.
2 下沉式移动接触网的动作机制
下沉式移动接触网的静止状态有工作位状态和非工作状态.电力机车取电状态下移动接触网处于工作位状态,装卸货物时处于非工作位状态.在货物装卸前后,移动接触网要完成两种状态的转换.
2.1 工作位状态
工作位状态下的移动接触网可将电能传输至受电弓[11],如图2所示.此时,移动段接触网位于线路中心上方,其两侧固定于门型架相应位置.如果移动接触网长度超过一个跨距,应遵循“之”字型布置原则.为保证接触线稳定状态,此时移动接触网段支柱应处于垂直状态,转动腕臂伸向线路中心且与线路中心线垂直,两侧坠砣高位拉紧接触线.工作位状态下,电力机车驶入移动接触网段时,移动接触网可保证受电弓持续从接触网取电,为电力机车提供牵引动力[12].
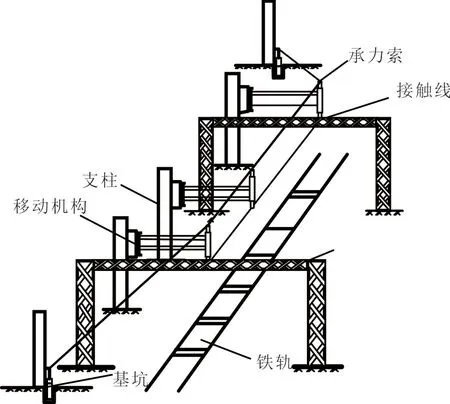
图2 移动接触网工作位状态
2.2 非工作位状态
当电力机车通过时,下沉式移动接触网在工作位状态.电力机车通过后,下沉式移动接触网运动至非工作位,如图3所示.
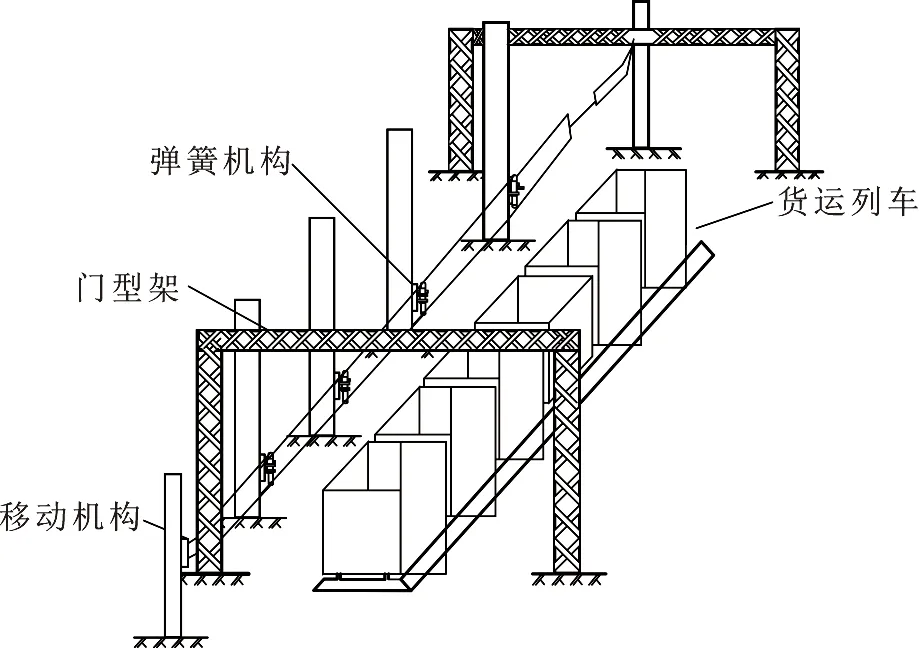
图3 移动接触网非工作位状态
移动接触网通过支撑机构下移,左、右侧坠砣通过各自的移动机构同步下降调节驱动转动腕臂,以支柱为圆心,沿顺时针方向将承力索和接触线移动到支柱侧后带动整体移动接触网下降.列车停在移动接触网段进行装卸作业时,移动接触网应处于非工作位.
室内控制台“系统启动”按钮接通后,门型架上移动接触线的接插件自动断开,移动接触网不带电.下沉式移动接触网从工作位向非工作位移动时,移动接触网接插件自动断开,移动接触网不带电.移动接触网移动到非工作位后,多个导线引流体与非工作位的接地装置以接插形式联结,使移动接触网上无任何电荷,保证安全作业.
2.3 下沉式移动接触网的工作状态
下沉式移动接触网的工作状态与工作区是否有车、是否进行装卸作业有关,如图4所示.
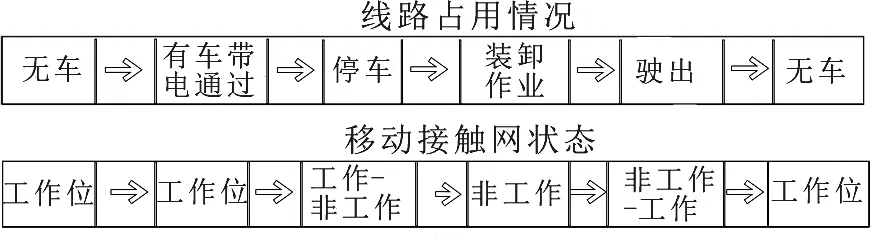
图4 移动接触网状态转换
无车时,移动接触网处于工作位.此时接触网带电,机车从一侧驶来,保持升弓、减速通过移动接触网后停在另一侧固定接触网下,车箱部分则停在移动接触网下,准备装卸作业.门型架上移动接触线的接插件自动断开,使移动接触网不带电,左、右侧坠砣通过各自的移动机构同步下降调节驱动转动腕臂,以支柱为圆心,沿顺时针方向将承力索和接触线移动到支柱侧后,与支柱一起下沉至基坑,即非工作位.移动接触网移动到非工作位后,多个导线引流体与非工作位的接地装置以接插形式联结,使移动接触网上无任何电荷.此时车箱上方空间充足,便于进行大型机械装卸作业.
装卸完成后,由于机车受电弓与另一侧固定接触网接触,可直接牵引车辆驶出工作区,移动接触网段无车.此时,控制支柱带动接触悬挂上升后,将接触网悬挂移至线路中心上方,重新回到工作位,为下一次装卸作业做好准备.
3 下沉式移动接触网试验研究
为验证本文下沉式移动接触网是否满足相关技术要求,在乌鲁木齐铁路局贯通装卸线开展了相关试验研究.试验段移动接触网全长52 m,采用下沉式柔性接触悬挂,共5根支柱,两端支柱用于支撑驱动坠砣,中间3根支柱相距16 m,上方安装旋转腕臂,相邻两支柱间设有1个接触线固定线夹,接触网电压25 kV.
3.1 冷滑试验
3.1.1 试验条件 冷滑试验在移动接触线无电情况下开展,此时隔离开关处于开位,移动接触网可通过驱动装置正常运转,机械部分正常,但接触线部分不带电.移动接触网处于工作位时,试验车在其下方,弓网保持接触,低速来回运行.试验共进行20次,冷滑试验条件如表1所示.

表1 冷滑试验条件
3.1.2 试验过程 冷滑试验具体执行过程如下:
1)试验开始前,使移动接触网处于工作位状态,测量相关数据;
2)试验车升弓,匀速从一侧固定接触网进入移动接触网段,直至试验车完全运行到另一侧固定接触网后停车,记录数据;
3)驱动移动接触网移至非工作位,记录数据;
4)将移动接触网移至工作位,记录数据;
5)下一次试验中,试验车反向运行,移动接触网动作过程相似.
3.1.3 观察、记录数据内容 冷滑试验中记录以下内容:
1)接触网处于工作位
① 移动接触网动触头与固定接触网静触头的接触深度;
② 接触线与轨面高度及接触线坡度;
③ 定位点处,接触线与线路中心的水平距离;
④ 试验车通过时,是否发生刮弓、钻弓、打弓、卡滞现象;
⑤ 冷滑试验中接触线导高.
2)接触网处于非工作位
① 接触悬挂是否下沉至基坑;
② 移动接触网与线路中心的水平距离.
3)接触网移动过程
① 线夹附近接触线张力是否均匀,线夹是否有松脱情况;
② 移动接触网在工作位和非工作位间转换耗时;
③ 接触网不同支柱处的拉出值;
④ 接触线是否存在弯曲、扭面、突变现象.
3.2 热滑试验
热滑试验进行时,隔离开关处在合位,工作位时接触线部分带电,试验车受电弓可从接触线取电.试验时,受电弓与接触网间保持一定压力运行,热滑试验条件如表2所示.

表2 热滑试验条件
热滑试验执行过程与冷滑试验相似,区别在于隔离开关处在合位,移动接触线带电.
热滑试验中记录以下内容:
1)接触网处于工作位
① 移动接触网部分是否正常带电,受电弓能否从移动接触网取电牵引机车运行;
② 动、静触头的结合深度;
③ 试验车升弓从移动接触网取电通过时,是否发生刮弓、钻弓、打弓、卡滞、电弧放电现象;
④ 热滑试验中接触线导高.
2)接触网处于非工作位
① 移动接触网非工作位时,接触悬挂是否下沉到位;
② 移动接触网是否满足限界要求;
③ 移动接触网段上是否有残余电荷.
3)接触网移动过程
① 线夹是否有松脱现象;
② 移动接触网在工作位和非工作位之间的转换耗时;
③ 接触线是否存在弯曲、扭面、突变现象;
④ 固定接触网与移动接触网间是否存在电弧放电现象.
4 结果与讨论
4.1 冷滑试验结果
工作位时,试验结果如图5所示.由图5a可以看出,20次冷滑试验中,工作位时动、静触头的接触深度均不小于40 mm,能够保证隔离开关闭合时移动接触网正常带电.从图5b可以看出,工作位移动接触线导高分布在(6 000±30)mm,受电弓不会发生大幅度上下震动.从图5c可以看出,移动接触网接触线的拉出值不会超出受电弓滑板工作范围,因此不会发生脱弓、钻弓事故.
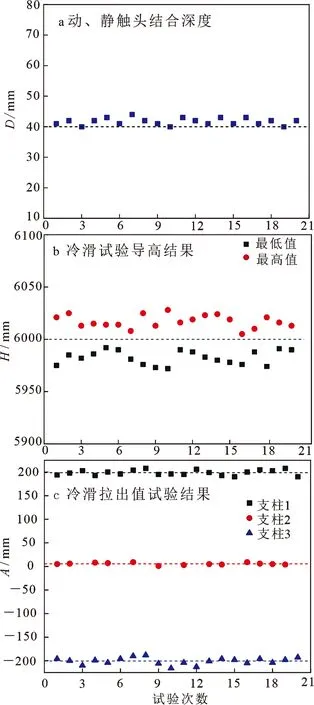
图5 冷滑试验工作位结果
移动接触网非工作位状态下的试验结果如图6所示.非工作位时,接触线距线路中心均大于2 000 mm,满足移动接触网安全限界要求,不会影响正常装卸作业.
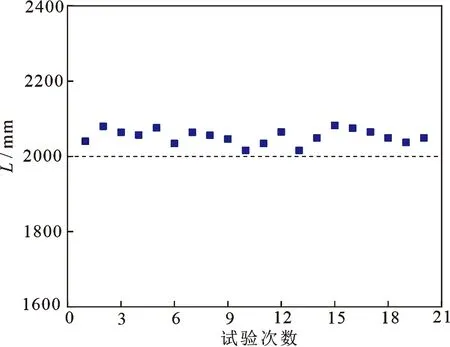
图6 冷滑试验非工作位结果
4.2 热滑试验结果
热滑试验过程中,受电弓能从移动接触网取电,使试验车穿过移动接触网段并停在另一侧固定接触网下.试验过程中未发生刮弓、钻弓、打弓、卡滞、松脱现象,接触线未出现弯曲、扭面、突变情况.通过激光测距得知,接触线导高及坡度均在规定范围内.非工作位时,接触线能够下沉至基坑.
试验中记录热滑试验工作位结果如图7所示.由图7可以看出,20次热滑试验中,工作位时,动、静触头的接触深度均不小于40 mm,移动接触网能够正常带电,导高分布在(6 000±30)mm范围,受电弓不会因为接触线陡坡而大幅度上下震动.
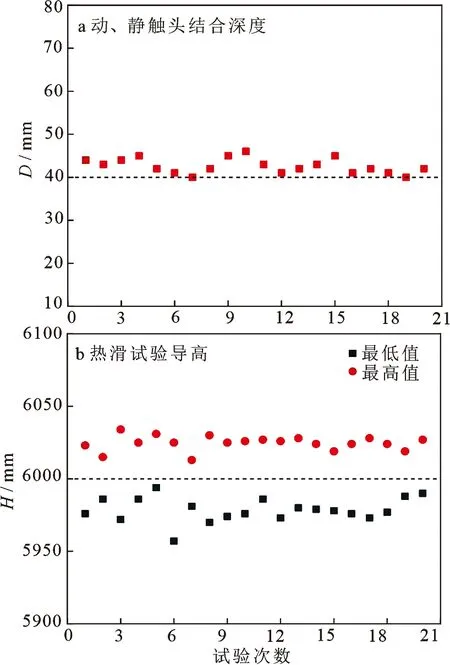
图7 热滑试验工作位结果
热滑试验非工作位结果如图8所示.由图8可知,非工作位时,接触线与线路中心距离均大于2 000 mm,满足移动接触网侧面限界要求及装卸空间要求.
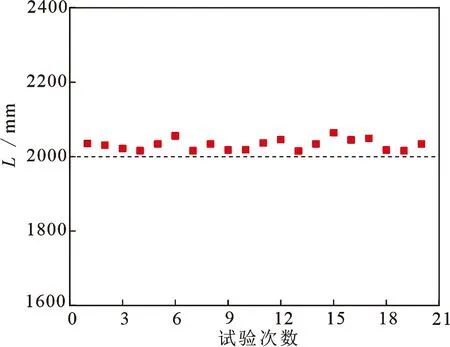
图8 热滑试验非工作位结果
冷、热滑试验过程中,移动接触网均未发生刮弓、钻弓、打弓、卡滞、松脱现象,接触线未出现弯曲、扭面、突变情况,线夹附近接触线张力均匀,线夹未出现松脱情况.
激光测距结果显示,接触线导高及坡度均在规定范围内,非工作位时,接触线都能够下沉至基坑.冷滑试验下移动网从工作位转换到非工作位的平均时间为150 s,反向运行平均时间为240 s;热滑试验下移动网从工作位转换到非工作位的平均时间为150 s,反向平均时间为239 s.
在20次冷滑试验中,动、静触头的接触深度均不小于40 mm,其中有3次结合深度为40 mm,处于临界深度;20次热滑试验中,工作位时动、静触头的接触深度均不小于40 mm,其中有2次为40 mm,处于临界深度,但仍能保证电气有效连接,接触线距线路中心均大于2 000 mm,符合技术要求.
冷滑热滑试验中接触线导高,接触网不同支柱处接触线拉出值均符合技术要求.
各项试验数据没有明显相关性,即单次试验不受其他试验结果影响.现场试验数据符合中国铁路总公司《技术管理规程》第十四条标准.
5 可靠性
下沉式移动接触网具有大跨度、高柔性等特点,而且在受电弓和复杂的自然界负载作用下易受环境因素的影响.接触网绝大部分裸露于自然环境中且无备用,一旦出现故障将会影响装卸搬运作业或者检修作业.移动接触网设备的可靠性成为影响铁路运输效率及安全的主要因素,因此,开展移动接触网的可靠性研究非常必要[13].
下沉式移动接触网系统的可靠性不仅与组成该系统各部件的可靠性有关,而且也与各部件间的组合方式和匹配关系有关.通过调研,收集下沉式移动接触网故障报告并进行分析,统计得到包括移动机构、弹簧机构、接触悬挂、支持装置、两侧坠砣驱动装置的故障事件.以下沉式移动接触网系统失效,即系统无法正常工作为顶事件,建立系统故障树,如图9所示.
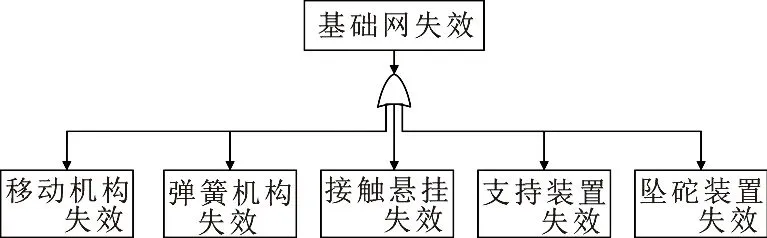
图9 下沉式移动接触网系统故障树
由于冷滑、热滑试验占用货物装卸场地,影响正常装卸作业,导致试验执行次数偏少,因此,本文通过蒙特卡洛仿真实验求解下沉式移动接触网系统的可靠度.其基本原理是:将概率论和数理统计知识与计算机技术相结合,通过大量的随机模拟实验统计出某事件的发生频率,以此来近似代替该事件发生的概率[14].蒙特卡洛仿真的优点在于不受元件故障时间、分布类型的限制,随着计算机技术的不断发展,该方法在解决工程、物理和数学等问题时得到了广泛的应用[15].

基于上述步骤的蒙特卡洛仿真可靠度求解流程图如图10所示.
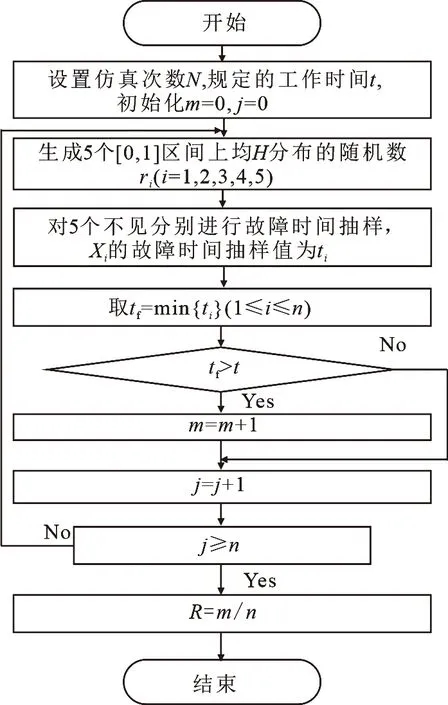
图10 蒙特卡洛仿真流程图
根据表3数据分析,投入运行后下沉式移动接触网系统的可靠度逐渐下降,随着运行时间的推移缓慢降低.

表3 可靠度求解结果
由于可靠度的计算过程未涉及维护因素,因此在现实情况中采取相应的维护措施后实际可靠度远高于计算结果.为保障系统的可靠性,建议对零部件的设计、选材、维护等环节不断进行优化与完善,延长部件的使用寿命;做好接触网设备的巡视、检修工作可以有效预防故障的发生,从而提高移动接触网系统的可靠性[17].
按照上述蒙特卡洛仿真流程,设置仿真次数为 1 000次,仿真模拟时间依次为2,4,6,8,10,12月,利用蒙特卡洛仿真求解下沉式移动接触网在各个时间点的可靠度,计算结果如表3所示.
6 结论
文中提出的下沉式移动接触网可有效解决铁路贯通装卸线作业过程中大型机械操作空间不足问题,避免了采用固定接触网的频繁调车问题及使用其他形式移动接触网的安全侵限问题,具有跨距大、结构简单、控制灵活、可靠高等优势.现场冷、热滑试验及可靠性分析结果均表明,该设备满足可靠性要求,能够保证移动接触网的正常运行,有效解决电气化货场装运难题,但本研究仍存在以下局限性,需要进一步研究观察.
1)移动接触网处于室外,受气温变化影响,其悬挂部分以及转动腕臂部分的张力也会发生变化,在极寒及酷暑环境温度下,移动接触网能否正常工作,有待进一步观察;
2)由于冷滑、热滑试验占用货物装卸场地,影响正常装卸作业,因此试验次数偏少.热滑试验通过后,仍需在具体使用过程中观察设备的工作状况.
猜你喜欢
云南画报(2021年10期)2021-11-24 01:06:38
时代农机(2018年12期)2018-02-14 06:07:22
上海铁道增刊(2017年3期)2018-01-22 03:01:24
能源(2017年7期)2018-01-19 05:05:05
石家庄铁路职业技术学院学报(2017年4期)2017-05-25 13:26:42
上海铁道增刊(2017年2期)2017-04-18 06:50:30
西南交通大学学报(2016年3期)2016-06-15 20:29:35
现代工业经济和信息化(2016年4期)2016-05-17 05:35:37
领导科学论坛(2016年4期)2016-02-28 09:18:37
少儿科学周刊·儿童版(2015年7期)2015-11-24 03:50:09