
欠驱动三指机械手设计与工作空间分析*
2023-11-20 07:13朱英茹史宝军
传感器与微系统 2023年11期
吴 雄,杨 冬,朱英茹,史宝军
(河北工业大学机械工程学院,天津 300401)
0 引 言
在过去的几十年里,机械手作为机器人的末端执行器而一直备受关注,越来越多的学者在机械手领域取得了重大的突破[1]。依据系统主动件数和自由度数的关系,可将机械手分为全驱动机械手和欠驱动机械手两大类。全驱动机械手可以精确控制每个指节的运动,从而精准抓取物体。因此,全驱动机械手成为研究热点,例如Shadow 手[2],Utah/MIT手[3]等,上述机械手均可以完成对物体的稳定抓取,但由于机械手每个关节至少由一个驱动器驱动,并配有复杂的控制系统和感知系统,使得整个末端执行机构控制复杂且价格不菲,这些缺点阻碍了全驱动机械手的进一步发展。欠驱动机构是常被应用于机器人中的一种新型机构,欠驱动机械手由欠驱动机构衍生而来,具有驱动单元少、价格便宜、控制简单、自适应抓取不同形状和尺寸的物体等特点。典型的欠驱动机械手有:SARAH[4]、SSSA-My-Hand[5]。虽然目前欠驱动机械手可完成对目标物体的抓取任务,但只能针对特定的对象,不同的抓取对象需重新设计机械手来配合抓取,大大增加了制造成本。
为了解决上述问题,本文基于欠驱动原理设计了具有多种工作模式的自适应抓取机械手。在自适应抓取目标物体时,近指节或中指节率先接触被抓物体,之后其他2 个指节依次接触被抓物体,对其进行自适应包络抓取。该机械手可应用于不同场合,具有运动灵活、抓取稳定、应用范围广等优点。
1 机械手结构设计
1.1 整体设计
依据欠驱动原理,设计了一种新型的自适应欠驱动机械手。机械手三维模型如图1所示,该机械手主要由3根手指、手掌、机架、步进电机和液压缸组成,具有3种抓取模式。机械手的驱动方式为液压驱动,具有运行平稳、维护方便等优点。

图1 机械手总结构
机械手拥有3 种工作模式,极大增加了手指的适应能力,工作模式如图2所示。
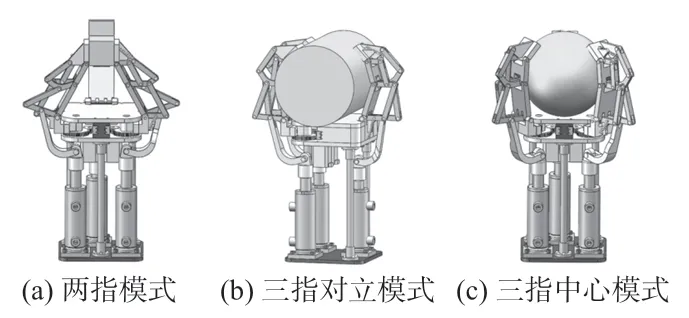
图2 机械手3 种工作模式
1.2 手指结构设计
欠驱动手指的结构如图3 所示。手指具有3 个指节,从左到右依次为远指节、中指节和近指节。手指背部集成有平行连杆机构和包络抓取机构,手指关节处通过添加弹性元件和机械限位的方式来限制各指节的相对位置。扭簧安装在近指关节处,限制近指节和中指节间的相对转动。
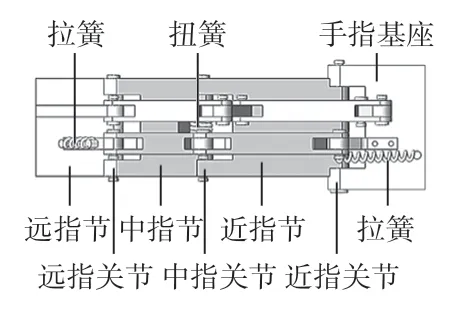
图3 机械手指结构
近指节、中指节和远指节都安装薄膜式压力传感器,如图4所示。

图4 薄膜压力传感器
2 机械手运动学分析
2.1 正运动学分析
运动学分析是机械手技术研究的重要环节,是机械手工作空间分析和运动控制的基础[6]。机械手的正运动学分析是已知手指连杆几何参数和角度范围,求解机械手相对于基坐标系的位姿。D-H(Denavi-Hartenberg)参数法由Denavi和Hartenber 提出,是一种通过齐次变换矩阵描述机器人两相邻连杆空间关系的方法。根据设计的手指结构,得到手指运动学参数:近指节a1=100 mm,中指节a2=70 mm,远指节a3=54 mm。
已知各指节长度的情况下,以手指关节转动角度θi(i=1,2,3,4)为变量,θi具体取值范围如表1 所示。建立D-H模型一般需要首先建立D-H坐标系[7],根据D-H参数建立手指的D-H坐标系,如图5所示。
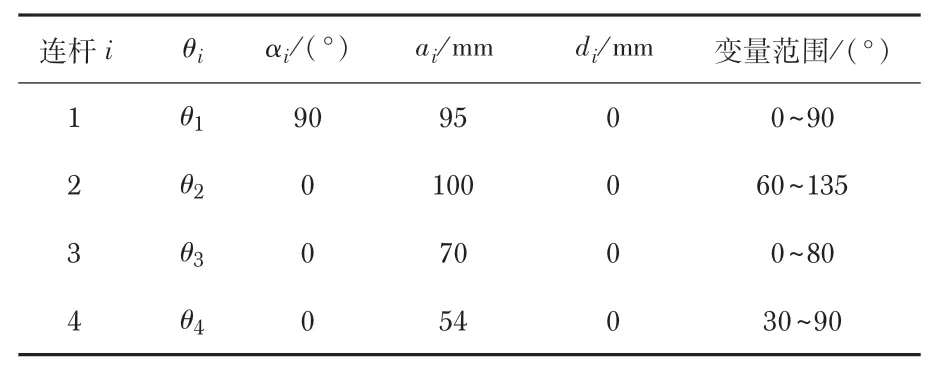
表1 各指关节D-H参数

图5 手指D-H坐标系
D-H法可以得到第i个坐标系相对于第i-1 个坐标系的齐次变换矩阵[8]
将表1中的手指的D-H参数代入公式中,由此得出各关节连杆间的转换矩阵
最终机械手的指尖坐标系相对于基坐标系的齐次变换矩阵为
其中,指尖相对于基坐标系的位置向量为[pxpy pz]T。
在求解工作空间时,只关注位置向量,求得
2.2 逆运动学分析
机械手逆运动学分析是已知各指节参数和指尖的位姿矩阵,求解各个指节相对应的关节角度[9]。
由式(3)建立方程组如下
由式(5)可得
式中si=sinθi,ci=cosθi,s23=sin(θ2+θ3),s234=sin(θ2+θ3+θ4),c23=cos(θ2+θ3),c234=cos(θ2+θ3+θ4)。
3 手指工作空间分析
根据表1 的D-H 参数,利用仿真软件中的Robotics Toolbox工具箱建立单根手指的运动学模型[10],可得如图6所示模型。
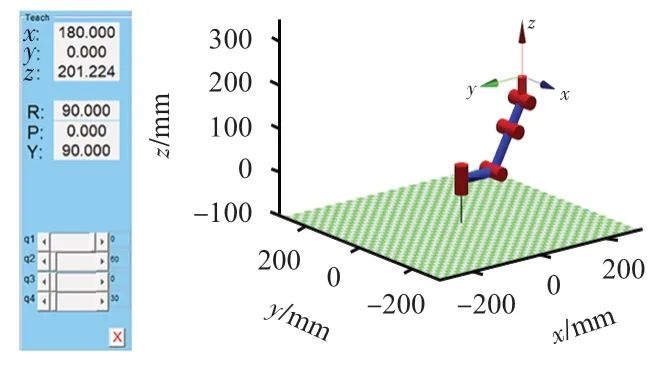
图6 手指仿真模型
通过取多组θi值来获得指尖的随机位置组成的点云图,即手指的工作空间。根据手指正运动方程,随机生成15 000组θi值,得出手指工作空间如图7所示。

图7 手指工作空间
由图7可以看出,空间中点云呈均匀分布状态,密度合理,未出现明显空洞,说明机械手指尖能够到达工作空间中任意一点。工作空间的范围和分布与机械手结构参数基本吻合,验证了手指结构设计的合理性。
4 结 论
1)本文通过研究欠驱动原理,设计了一种欠驱动三指机械手。
2)采用标准D-H法建立手指的运动学模型,并通过齐次变换推导其正、反运动学方程。
3)通过仿真软件中的Robotics Toolbox工具箱建立手指的运动学模型,并采用蒙特卡洛法计算了手指的工作空间点云图。得到的工作空间分布较为密集均匀,直观性强,为后续机械手的控制研究提供重要参考依据。
猜你喜欢
青少年科技博览(中学版)(2023年5期)2023-06-26
网络安全技术与应用(2022年5期)2022-07-26
河北省科学院学报(2020年1期)2020-05-25
制造技术与机床(2018年11期)2018-11-23
中国设备工程(2017年11期)2017-06-29
通信电源技术(2016年1期)2016-04-16
创造(2016年5期)2016-02-01
海军航空大学学报(2015年1期)2015-11-11
机电信息(2015年3期)2015-02-27
机械制造与自动化(2014年1期)2014-03-01
