
基于子母共位电磁超声换能器的平面波成像*
2023-11-20 07:13:46王星宇周进节张宗健张吉堂
传感器与微系统 2023年11期
王星宇,郑 阳,周进节,张宗健,张吉堂
(1.中北大学机械工程学院,山西 太原 030051;2.中国特种设备检测研究院,北京 100029)
0 引 言
超声检测被广泛应用于无损检测(non-destructive testing,NDT)中,其中压电超声作为成熟的超声检测技术,主要适用于200 ℃以下的检测环境,而电磁超声有着检测过程无需耦合剂、适合表面有隔离层、表面粗糙度较大、超高温、高压等极端恶劣环境检测、高速在线检测的优势[1~6]。超声相控阵成像检测技术优势明显,成像效果清晰明确,使用过程也是十分方便。但电磁超声相控阵的仪器发展不完善,电磁超声传感器研究不足,没有与相控阵成像算法配合起来。
超声相控阵领域中的平面波成像技术是当前的热点技术,相比于被誉为“黄金标准”的全聚焦成像,在医学领域中首次提出的平面波成像具有在声波激发采集次数和数据后处理上更简便高效的优势[7]。国内外许多专家学者在医学和无损检测领域对平面波成像算法进行了优化,如相位相干系列算法最早在医学领域得以应用[8~10]。而后由Camacho J引入无损检测领域,可提升平面波成像算法的成像检测效果[11,12]。而Merabet L等人归纳总结出频域平面波成像算法,减少了平面波激发次数,提高了成像效果[13]。无损检测领域面临的检测情况相比医学领域没有那么复杂,但上述优化算法依靠全通道激励、多通道接收继而采集多角度回波数据的基础,系统操作复杂、采集数据量依旧较大,因此,可采用单个方向下的平面波成像算法来避免上述缺点。该类算法采集数据集更少,检测速度更快。在未来可应用于管道、储罐等环境的实时监测。该方法主要针对常规压电超声领域进行了分析。
然而,目前国内电磁超声相控阵的发展尚且处于起步阶段,还存在电磁超声相控阵换能器设计方法尚不明确的问题,严重制约了该技术的进一步发展[14,15]。目前电磁超声体波成像发展缓慢,使用的成像方法为B扫成像,合成孔径聚焦技术(synthetic aperture focusing technique,SAFT)成像、全聚焦方法(total focusing method,TFM)成像、平面波成像,其中SAFT与TFM作为高分辨成像算法目前逐步引入电磁超声领域中,平面波成像算法暂时未引入电磁超声领域。SAFT成像算法一般需要扫查装置,且针对电磁超声相控阵这类检测,存在阵元间距稀疏问题,暂未被优化分析,TFM成像复杂度较高,计算时间长,不太适用于实时成像。其中平面波成像算法成像质量最优,从算法角度分析,可从压电领域引入电磁超声领域,但其参考压电领域需要多个角度下的延时偏转,继而收集多个角度的回波检测信号,需要的激励功率较大,检测效率有所降低,因此开发适合单通道激励下单个方向声波传输的平面波成像的电磁超声换能器(electromagnetic acoustic transducer,EMAT)可以解决这个问题,主要采用模块分离的思想,通过设计激发平面波的单阵元线圈作为激发线圈,同时设置N个通道线圈作为接收线圈。然后多通道采集N组数据,实现电磁超声下高效的平面波成像检测。
本文针对电磁超声相控阵成像算法如何实现的问题。首先,简化平面波成像算法,推导出单平面波成像算法公式;然后,建立电磁超声相控阵换能器二维有限元模型,对比不同绕线方式对于激发平面波的影响;最后,分析了优化绕线方式下的平面波成像检测特性。
1 算法原理
1.1 网格划分
在EMAT 激发与接收信号过程中,由于始波的影响在表面近场区无法进行成像,而底面回波表明试块高度大小,在底面回波之后的信号对于成像是无意义的,适合进行缺陷成像的区域为换能器正下方去除近场区至试块底面的区域,称之为图像重建区域,如图1 中的网格区域所示。坐标原点位于重建网格中点的上方,沿阵元布置方向为X轴,垂直于阵元的深度方向为Z轴。为了避免始波盲区对重建可视化效果的影响,设置图像重建区域在距离扫描平面下方一定深度的位置,重建区域大小为L×D(平面波阵元宽度×深度)。网格分辨率为(σx,σz),每个网格单元对应的索引为(i,j),i=1,…,M,j=1,…,N,根据网格分辨率和重建区域尺寸,可得重建网格尺寸M×N为

图1 重建网格的数据映射
对于图像重建区域的任一网格点(i,j)对应的物理位置,可表示为
1.2 平面波成像基本原理
平面波发射时的接收信号示意如图2 所示,这里只考虑激发0°的平面波。
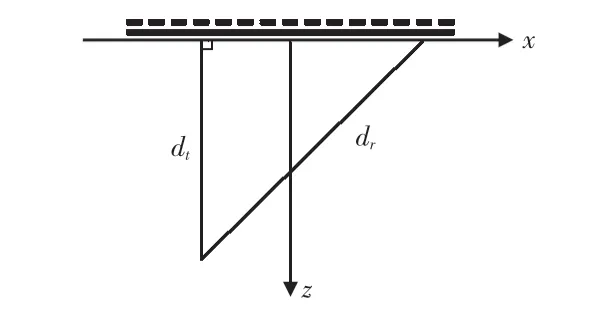
图2 0°平面波声传播路径示意
激发线圈是一个整体,接收平面波回波的阵列元素的个数为N。每个阵列元素的坐标为(xi,zi)。对于成像区P(x,z),将平面波从阵列传播到成像区P(x,z)的传播距离为dt,将后向散射信号从阵列P(x,z)到第i个单元的传播距离设为dr。因此,该过程对应的传播时间为
每个像素点的振幅通过发射角和每个接收阵列元素的叠加获得,可以表示为
2 EMAT设计
实现平面波成像的关键是激发出合适角度的平面波,可以通过多个阵元同时激发得到平面波,这种方式可以激发多角度的平面波,但由于电磁超声相控阵技术还不成熟,没有办法做到同时激发和延时偏转,且激励功率大,因此可以采用多个阵元并联或串联成一个通道激发。
2.1 仿真模型建立
为了研究电磁超声体波传播特性与不同线圈和磁体配置对其辐射声场特性的影响,利用有限元软件,对多磁体跑道形线圈,单磁体跑道形线圈和单磁体蝶形线圈3种不同换能器结构进行了仿真分析,探究适合平面波成像的换能器结构。这3 种配置方式的EMAT 主要产生超声横波,在超声体波成像中最常用的就是超声横波[1]。3 种EMAT如图3所示。

图3 3 种线圈示意
单磁体线圈和多磁体线圈磁体下方为8 组跑道形线圈串联组成的大线圈,由于跑道形线圈工作部分为直导线部分,直线部分提供主要的辐射声场,沿导线长度方向(即X轴方向)上的辐射声场可忽略,而大孔径蝶形线圈在使用时会将多余的线圈部分折起来,不与试块接触,故可将跑道形线圈简化为长直导线横截面上的二维模型进行分析,将线圈近似等效为一根长直导线,采用单层结构,每组线圈两侧电流方向相反。换能器模型的轴线与Z轴重合,整个模型关于换能器轴线左右对称,定义磁体材料为钕铁硼,剩磁为1.4 T,方向沿Z轴垂直向下[16]。模型参数及材料属性如表1所示。

表1 模型参数
2.2 仿真结果与分析
提取8 μs时刻3种不同磁体和线圈配置下的EMAT产生的位移振动信号来表征辐射声场信号。如图4 可以看出3种不同的线圈和磁体排布方式中激发出的波形类似,均能激励出3种声波,3种声波分别为横波、纵波和表面波,并且辐射声场中横波的能量最大[1]。但只有蝶形线圈激发出完整的平面波。单磁体多跑道形线圈激发时,相邻2 个线圈的电流方向相反,在相邻的位置激发出的涡流很微弱,所以在相邻位置处带电粒子流动速度下降,在磁场的作用下,受到的洛伦兹力较小,激发出的声场不平整;多磁体多跑道形线圈激发时,磁体的磁极相反,两侧线圈电流方向相反,导致试块表面激励出涡流方向相同,所以在线圈相邻下方的试块中激励出的波形近似为平面,由于单磁体跑道形线圈本身的声场特性导致波形不完整,中间会有等于阵元数量的截断区域[1];单磁体蝶形线圈激发时,在磁体下方的导线瞬时电流方向相同,而在试块近表面的磁体周围磁场方向近似为垂直于试块表面方向,所以同一时刻试块近表面的带有相同电荷粒子受到的力方向一致,且均为水平方向,因此蝶形线圈激励的超声波为平面波,蝶形线圈和跑道形线圈不同,虽然两种线圈都有工作区域和非工作区域,跑道形线圈非工作区域为弧线部分,在仿真中简化了,但是蝶形线圈非工作区域占较大,两侧非工作区域几乎等于蝶形线圈工作区域,在仿真中如图4(c)非工作区域也激发出横波和纵波,实验中应该考虑如何消除这部分。

图4 3 种不同配置EMAT辐射声场云图
本文提出一种新的传感器布置形式命名为子母共位EMAT,该换能器将激发线圈与接收线圈分离,激发线圈为整体线圈,接收线圈为分离多通道线圈,两部分线圈均为蝶形线圈。设计采用蝶形线圈作为接收线圈,蝶形线圈的通道数为8。
3 实 验
实验通过电磁超声平面波检测系统完成,电磁超声平面波缺陷检测系统主要由上位机软件、电磁超声检测仪器、子母共位EMAT和缺陷试块组成,用于超声波信号的激励和接收,如图5 所示。其中子母共位EMAT 由平面波激发线圈和多通道接收线圈以及永磁体组成。如图6 所示,框中为永磁体放置区域,也是该换能器工作区域。
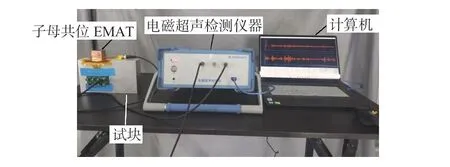
图5 缺陷检测实验系统
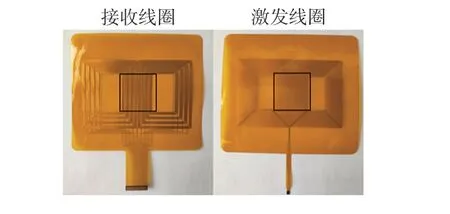
图6 传感器线圈
图7所示为设计的电磁超声缺陷试块的一部分,试块整体尺寸为300 mm ×170 mm ×50 mm(长度×高度×厚度),材料为Al,图中展示实验使用的3 个区域横通孔缺陷阵列数为5,第一个横通孔中心距离试块表面20 mm,相邻横通孔之间的水平间距为5 mm,垂直间距为8 mm,孔径尺寸在区域1到区域3分别对应为3,2,1 mm。
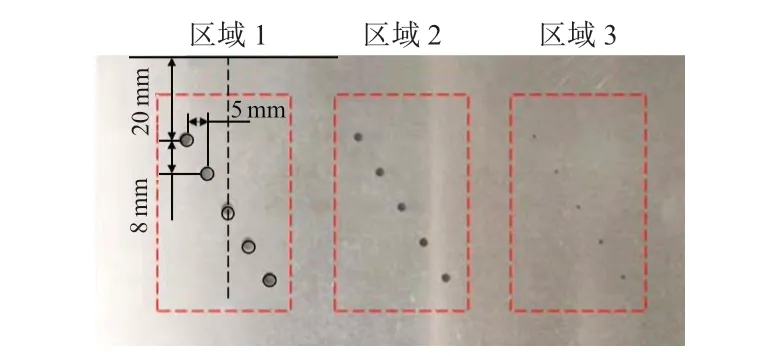
图7 缺陷检测试块
使用单通道电磁超声激发平面波,多通道采集信号实现平面波成像。由于电磁超声能量转化率比较低,并且小孔径阵元接收来自缺陷散射信号时,位于阵元孔径正下方的缺陷回波幅值大于其他方向的回波,在实际实验过程中的信号比仿真信号信噪比要低很多。图8 所示为8 个通道接收信号的原始波形。
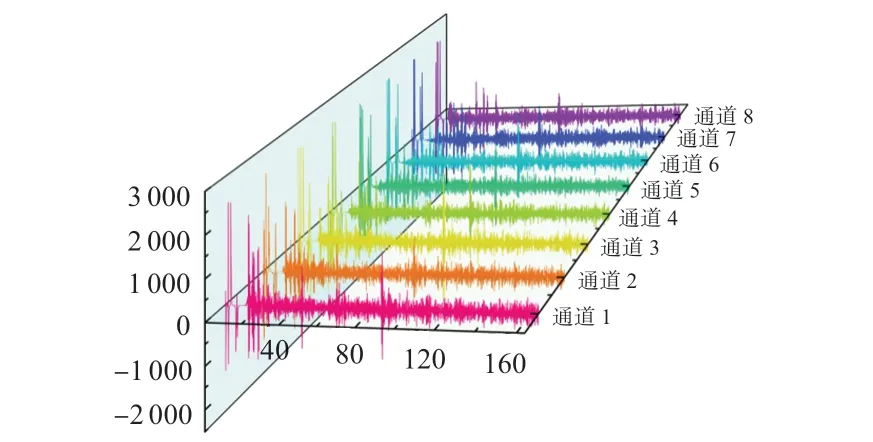
图8 8 个通道原始波形
将采集的数据导入仿真软件中,对数据进行处理,使用平面波成像算法对各个区域进行成像。如图9(a)所示为区域2的成像结果。由于单平面波算法对于深度越大的缺陷两旁的伪影也就越大,加上噪声的影响,在第二个缺陷开始缺陷成像逐步分离出2个伪影,2个伪影中心为实际缺陷位置。如图9(b)所示,通过小波降噪,得到信噪比高的信号,用信噪比高的信号进行成像,成像效果较好。通过小波算法处理后,确定缺陷位置如表2 所示,自上而下依次是孔1至孔5与缺陷实际位置对比,对于缺陷纵轴位置坐标定位准确误差在0.5 mm以内,而对于横轴位置坐标定位较准确,误差在2 mm左右,上文也分析到横向分辨率受到阵元间距和阵元数量影响,增加阵元数量会使横坐标定位更加准确。

表2 缺陷定位坐标 mm
从表2中数据可知,即使存在伪影,但由于该算法以成像区域网格点的声压幅值最大点作为定位基准,伪影的出现几乎不影响缺陷定位,存在伪影也在可以接受的范围内。如图9(c)所示最后通过相位相干算法对图像进行加权处理。消除部分伪影,得到最终成像结果图,可进一步提升检测成像信噪比。
4 结 论
1)通过调整EMAT的磁体和线圈布置,实现能量更多集中到横波的声波检测方式。在单磁体配置蝶形线圈配置下,辐射声场能量更加均匀。
2)通过布置重叠的两层线圈,使用单通道仪器就能实现电磁超声单平面波成像相控阵算法,通过比对不同类型算法,发现相位相干平面波成像与小波降噪下的平面波成像算法可进一步提升成像信噪比。
3)本文使用的子母共位EMAT,可以对铝块中倾斜阶梯排列直径2 mm的圆孔形缺陷采集数据后进行处理成像,缺陷定位准确,成像效果良好。总之,子母共位相控阵传感器与平面波算法结合在圆孔缺陷检测中是非常有效的。
猜你喜欢
火控雷达技术(2023年2期)2023-07-15 14:00:06
材料与冶金学报(2022年2期)2022-08-10 09:15:40
光通信研究(2022年2期)2022-03-29 03:19:18
数学物理学报(2021年3期)2021-07-19 06:02:26
中国传媒大学学报(自然科学版)(2021年1期)2021-06-09 08:43:02
电子制作(2016年11期)2016-11-07 08:43:45
材料与冶金学报(2015年3期)2015-12-23 07:12:04
云南电力技术(2015年2期)2015-08-23 01:32:00
金属加工(热加工)(2014年1期)2014-10-08 11:38:20
装备制造技术(2013年6期)2013-06-26 11:38:08
