
磁柱面作图法获取航天器垂向有效磁矩的探究
2023-11-14 07:40吴卫权符建明王义元孙晓春龚凯翔周雪琴
航天器环境工程 2023年5期
吴卫权,符建明,陈 丽,王义元,孙晓春,龚凯翔,王 浩,王 韬,周雪琴
(1.上海卫星装备研究所,上海 200240; 2.上海宇航系统工程研究所,上海 201109)
0 引言
航天器磁性测量误差因素与航天器的结构尺寸、磁矩量级和内部磁性分布特征,以及磁传感器布局方式和磁性测试设备性能等有很大关系。对于中小尺度、中低量级磁矩的航天器,常规近场测试方法受系统误差和随机误差影响不大,整器磁矩测试偏心误差相对较小;特别是近场法磁测试精度水平面分量远高于垂向分量,因此航天器在卧置状态下测试时其垂向磁矩偏心误差将得到有效改善。而对于大尺度、大磁矩航天器,为了能准确模拟整器在轨磁矩状态,避免因分舱测试及模拟组合计算等带来的误差不确定性,通常仅在航天器正置态下进行整器磁测试;当航天器垂向含有多种偏心严重、磁矩较大载荷部件时,垂向测试结果受偏心误差影响尤其突出,常规单一的几何中心赤道面布局测试方法将无法得出航天器垂向真实磁矩值,以至无法评估整器磁测试结果[1]。
本文针对某大磁矩航天器垂向磁矩分布特征,提出一种在航天器垂向不同舱段赤道面上多层次布局传感器、全高度遍历航天器垂向磁场强度并捕捉其垂向磁赤道区域进而在该区域获取有效磁矩的测试方法,并利用标准磁矩模型进行仿真复现和验证试验。考虑到航天器水平面尺寸较之垂向尺寸相对较小以及水平面近场测试方法精度的可控有效性[1],本文主要针对该大磁矩航天器垂向磁矩测试方法展开叙述。
1 磁性分布特征
大磁矩航天器磁性分布较为复杂(见图1),不同舱段内含有多个大永磁体、软磁体载荷及部组件。
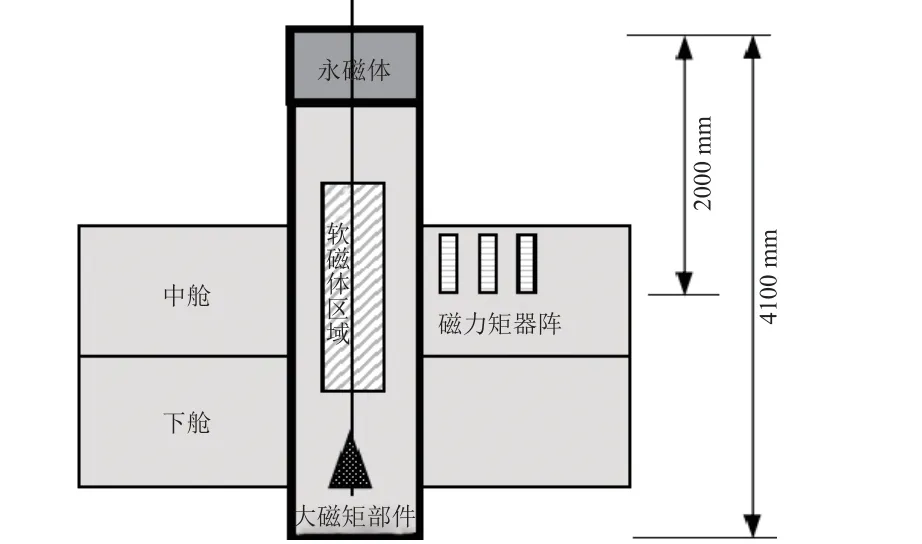
图1 整器磁性分布示意Fig.1 Schematic diagram of the whole spacecraft magnetic distribution
试验时整器包络尺寸≤φ3350 mm×4400 mm,整器垂向高度为4100 mm、质量约2800 kg。总体磁设计技术要求是:磁补偿后整器磁矩在水平面x、y向均小于5 A·m2,垂直轴z向小于100 A·m2。航天器主磁轴为垂直轴(z轴),该轴磁性测试和控制是整器磁设计的关键[2-3]。
2 测试原理和方法
航天器磁矩测试一般采用近场测试方法[4],该法为磁场作图法中球谐分析方法的特殊测试模式。试验时,将航天器放置在磁测试区域中央的无磁转台上旋转,在航天器几何赤道面上距航天器几何中心一定距离处一字排列放置若干台三分量磁传感器,测试其周围空间的磁位梯度分布值,完成0°~360°范围内航天器几何赤道面不同测点和方向的磁场图测绘。在对试验区域中心周围环境磁场干扰信号进行滤波处理后,将采集获得的航天器净磁场信号分布通过Fourier 谐波分析,拟合航天器实际的磁场强度信号值,作为转角函数进行数学反演计算,求得其有效磁矩。
根据近场原理,当传感器与航天器中心的距离相对其维度半径较小时,宏观上可将航天器磁矩看作是不同舱段内各单元部件磁矩的组合,传感器测得的磁场强度即为各单元部件磁矩产生的磁场强度叠加合成。在满足近场测距比规则及相同传感器测试布局条件下(排除其他误差因素),相似磁矩分布特征(主要的单元磁矩等比例尺度分布、量值和极性一致性分布)的不同尺度被测产品其水平向0°~360°周期内测点、垂直向始末周期内等比例间距测点处各向磁场分布规律将呈现等效相似特征(振幅不同、相位和频率变化近似一致),并保持磁矩反演结果的一致性和等效性。
考虑到大磁矩航天器磁性分布特殊性以及常规单一测试布局获取磁场强度分布信息少、垂向磁矩偏心误差大、数采计算效率低等缺陷,本文采用基于近场测试原理的改良型球面测试方法——磁柱面作图法,即:以在航天器垂向上下舱段典型区域多层次布局传感器的方式代替在航天器几何赤道面单一布局传感器的传统方式,快速获取整器垂向多层次、全柱面周围不同磁位梯度分布值;在明确整器垂向磁性分布特征后,通过逐次逼近、捕获航天器整器垂向磁赤道面区域,最终获得航天器垂向有效磁矩结果。
3 整器垂向磁矩测试
3.1 测试系统及设备
在AIT 厂房内20 m×20 m 的测试场地中心区平行铺设2 根长度至少为10 m 的导轨及其枕木等辅助设施,导轨承载力为10 t;将承载力为5000 kg的二维无磁转台置于导轨上,航天器固定于转台上即可绕垂直轴作360°旋转和沿导轨作水平向移动。磁场采集系统使用CCXT-A/40 路高精度数据采集系统,分辨率优于1 nT;每次测试时可充分使用12 个三分量磁采集传感器和1 个三分量环境监测传感器。固定安装3 层无磁传感器支撑平台,每层平台的承载力为20 kg,伸展高度为6 m;每一测试状态下,每层平台上可布局安置4 个三分量传感器。测试系统及设备布局如图2 所示。
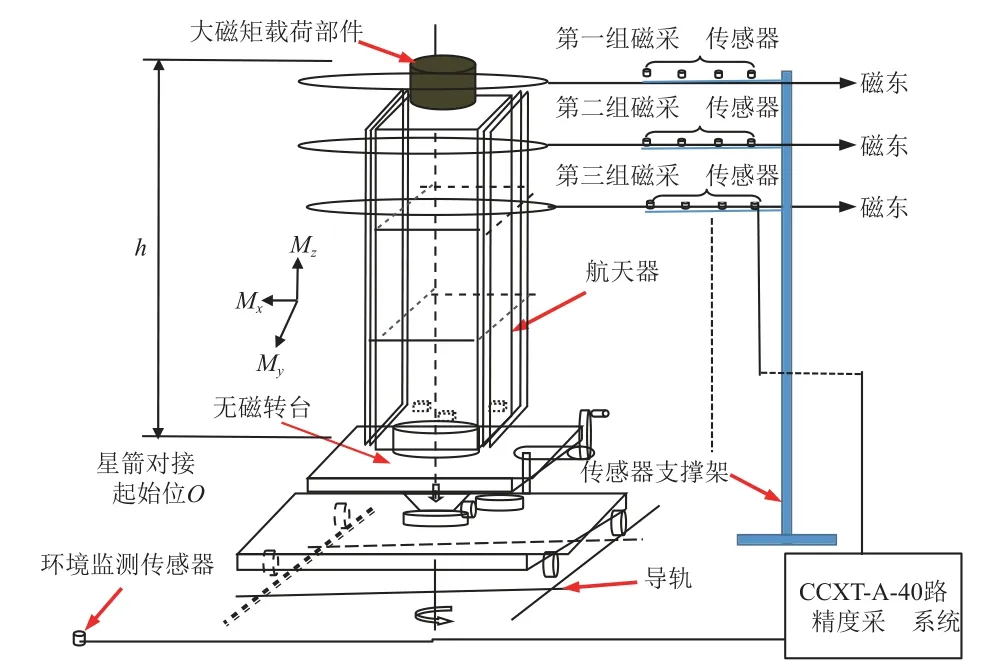
图2 多层式传感器近场磁测试系统及设备布局Fig.2 Arrangement of multi-layer sensors for near-field magnetic testing system
3.2 采集传感器布局
4 台三分量磁采集传感器等间距放置在每层传感器支撑平台上,用于采集整器各个赤道面的磁场信号。各分层赤道面上的磁采集传感器与各赤道面中心之间测距比Sp=D/ri,其中:D为航天器赤道面包络尺寸;ri为采集传感器至各赤道面中心的距离。Sp须符合近场测距比规则,即0.4<Sp<1.4。每个采集传感器的x向为地磁南北向,北为正;y向为地磁东西向,东为正;z向为天地向,地向为正。由于传感器采集信号随测试距离增加而减弱,测试误差随之加大,所以为获得足够高的测试精度,必须综合考虑ri的选择与信噪比,使在保持适当远距离的同时确保可采集到足够强的磁信号。传感器采取近场多层式布局方式,其参数选择见表1[5-6],其中n为垂向赤道面数量,每层4 台三分量传感器在每一个测试状态可获得一组(6 个)磁矩结果(满足CNAS-CL01 实验室规范标准的最小统计样本要求[7])。

表1 多层式近场磁传感器测试布局参数Table 1 Arrangement parameters of multi-layer sensors for near-field magnetic testing
3.3 环境监测传感器布局
在远离航天器中心区足够远的距离R处放置一台监测航天器磁试验中心区环境磁场波动的三分量磁监测传感器,用于环境干扰信号滤波。根据航天器预估的冗余磁矩量值M预估和磁传感器分辨率dB,由偶极子法确定R须满足R>(200M预估/dB)1/3(R、M预估、dB的单位分别为m、A·m2、nT),确保其获取的信号与航天器自身磁场不相关。监测传感器的x向沿地磁南北向,北为正;y向沿地磁东西向,东为正;z向为天地向、地向为正[8]。
3.4 巡测及结果
确定磁采集传感器磁轴、磁监测传感器磁轴、地磁场磁轴、航天器磁坐标轴、转台零位轴处于一致状态后,开始巡测。航天器在无磁转台上旋转一周完成一次测试,然后按一定落差依次下移支架平台,直至完成航天器垂向全高度磁场强度和磁矩巡测。磁矩计算公式及方法参照GB/T 32307—2015[4]。
从星箭对接面O位开始,不同测试高度下整器垂向静态磁场和磁矩变化值见表2[9],变化曲线见图3。
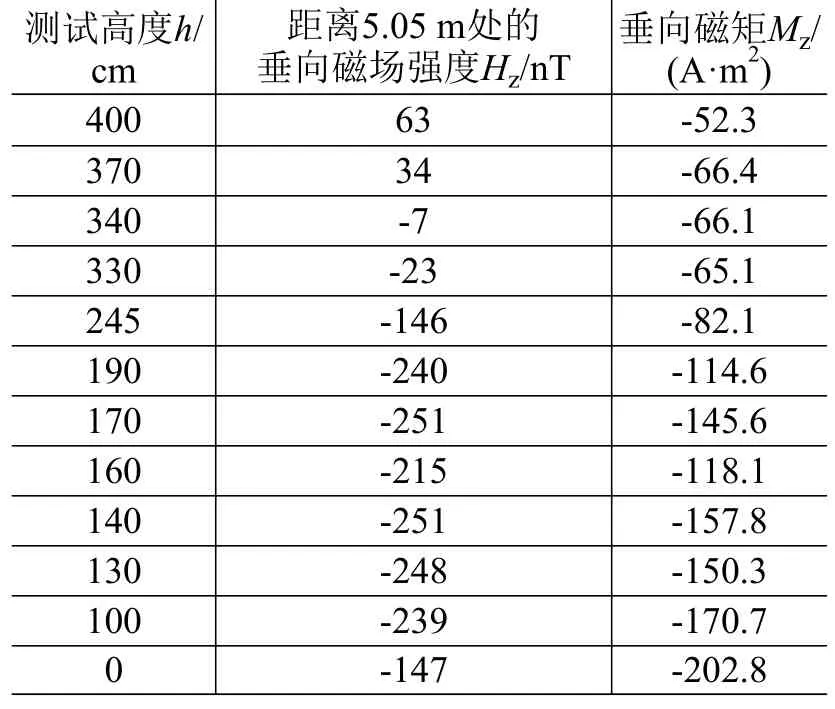
表2 不同测试高度下整器垂向静态磁场和磁矩变化值Table 2 Variations of the whole spacecraft vertical static magnetic field and magnetic moment at different test heights
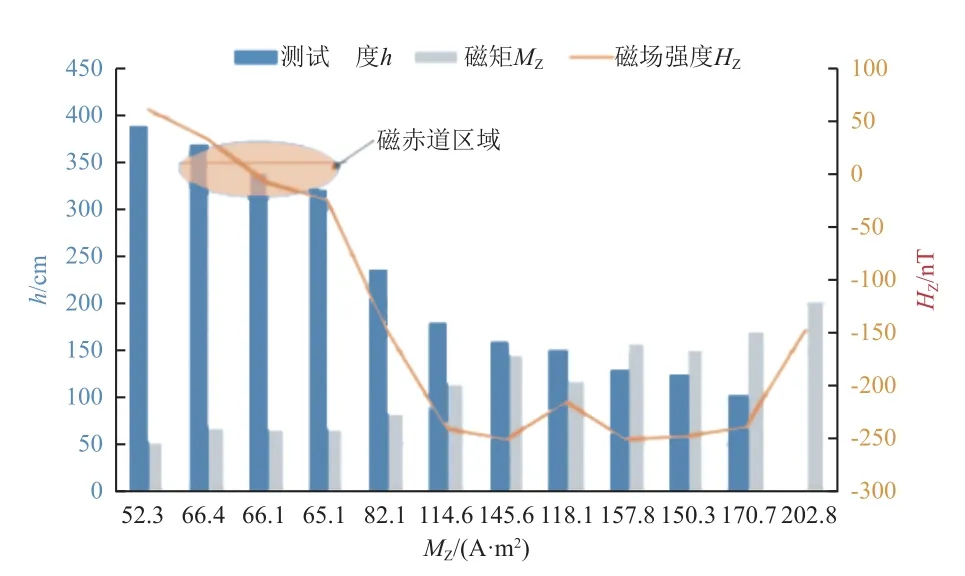
图3 不同测试高度下整器垂向静态磁场和磁矩变化Fig.3 Variations of the whole spacecraft vertical static magnetic field and magnetic moment at different test heights
由表2 和图3 可知:从星箭对接面O位开始至航天器大磁矩载荷部件顶端400 cm 处,不同高度下垂向磁场强度Hz(R1=5.05 m,其中R1为对应赤道面上第一个传感器与航天器中心的距离)变化范围为-251~63 nT;垂向磁矩Mz变化范围为-202.8~-52.3 A·m2;垂向磁赤道面在330~340 cm 处。
4 标准磁矩模型仿真试验结果
为复现和验证大磁矩航天器垂向磁场、磁矩测试结果变化异常的情况,按近似10∶1 的器模比例建立木制结构的标准磁矩模型进行仿真测试。考虑到大磁矩航天器宏观上垂向磁矩分布特征可能存在的几种模式,将模型分为单磁偶极子、同向双磁偶极子、异向双磁偶极子和组合态多磁偶极子4 类模式;为了验证模型内磁矩量值在方向上的权重差异引起的测试结果区别,进一步细分为近似对称和非对称双磁偶极子、多磁偶极子模型1 和模型2。模型中标准磁矩源的布局充分兼顾上下层边缘位置以确保兼顾最大误差阈值范围[10]。各模型中所预置的不同标准磁矩号及量值见表3。

表3 5 个标准磁矩源的磁矩量值Table 3 Magnetic moment value for five standard magnetic moment sources
4.1 单磁偶极子模型及仿真测试结果
单磁偶极子模型如图4 所示,不同传感器高度下模型垂向磁场和磁矩变化值见表4,变化曲线见图5。

表4 不同传感器高度下单磁偶极子模型垂向磁场和磁矩变化值Table 4 Values of vertical magnetic field and magnetic moment for single magnetic dipole model at different sensor heights
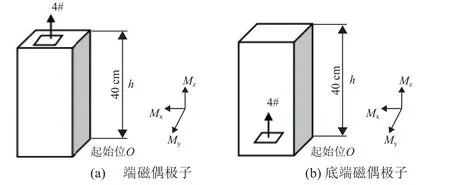
图4 单磁偶极子模型Fig.4 Single magnetic dipole model

图5 不同传感器高度下单磁偶极子模型垂向磁场和磁矩变化曲线Fig.5 Curve of vertical magnetic field and magnetic moment for single magnetic dipole model at different sensor heights
表4 和图5 表明:从模型起始位O至顶端40 cm 处,不同高度下,顶端和底端磁偶极子模型的垂向磁场强度Hz(R1=0.56 m 处)变化范围分别为151~7849 nT、187~7507 nT;垂向磁矩Mz变化范围分别为8.7~14.3 A·m2、9.4~14.1A·m2;与模型预置的标准值相比,垂向磁矩Mz测得结果相对误差范围分别为1%~39%、3%~34%;两种模型垂向均未捕捉到磁赤道面。
4.2 同向双极子模型及仿真测试结果
同向双极子模型如图6 所示,不同传感器高度下模型垂向磁场、磁矩变化值见表5,变化曲线见图7。
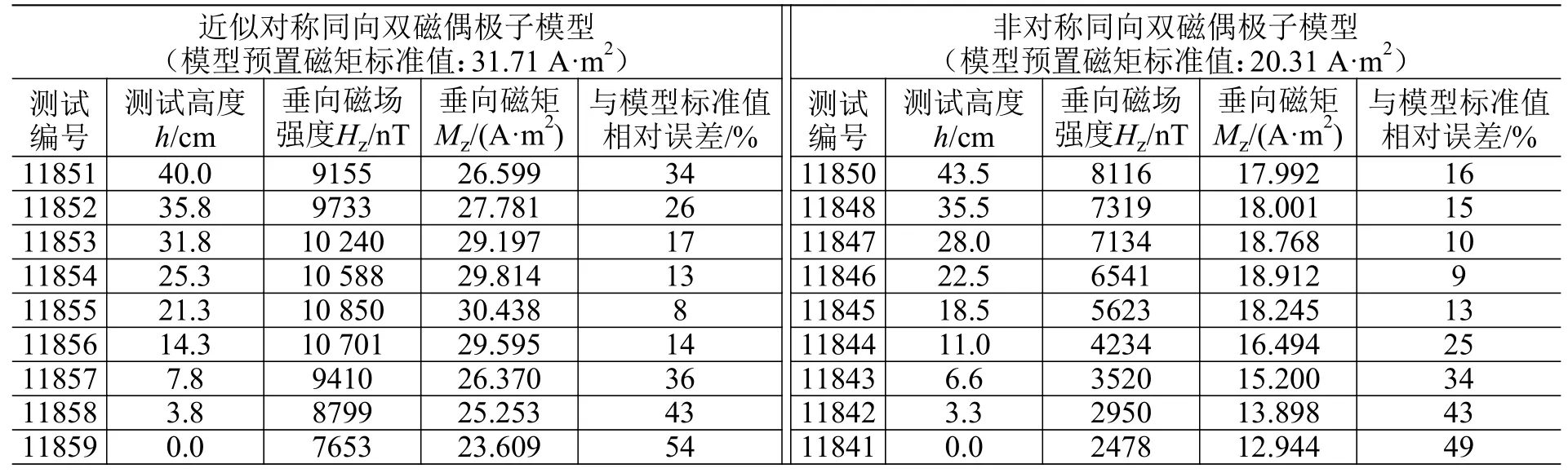
表5 不同传感器高度下同向双磁偶极子模型垂向磁场和磁矩变化值Table 5 Values of vertical magnetic field and magnetic moment for codirectional double magnetic dipole model at different sensor heights

图6 近似对称和非对称同向双磁偶极子模型Fig.6 Approximate symmetric and asymmetric codirectional double magnetic dipole model
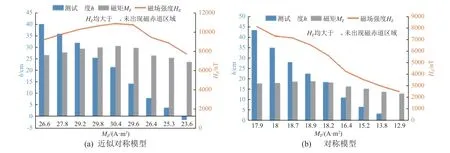
图7 不同传感器高度下同向双磁偶极子模型垂向磁场和磁矩变化曲线Fig.7 Curve of vertical magnetic field and magnetic moment for codirectional magnetic dipole model at different sensor heights
表5 和图7 表明:从模型起始位O至顶端40 cm处,不同高度下,近似对称和非对称同向双磁偶极子模型的垂向磁场强度Hz(R1=0.56 m 处)变化范围分别为7653~10 850 nT、2478~8116 nT;垂向磁矩Mz变化范围分别为23.6~30.4 A·m2、12.9~18.9 A·m2;与模型预置的标准值相比,垂向磁矩Mz测得结果相对误差范围分别为8%~54%、9%~49%;两种模型垂向均未捕捉到磁赤道面。
4.3 异向双磁偶极子模型及仿真测试结果
异向双磁偶极子模型如图8 所示,不同传感器高度下模型垂向磁场和磁矩变化值见表6,变化曲线见图9。
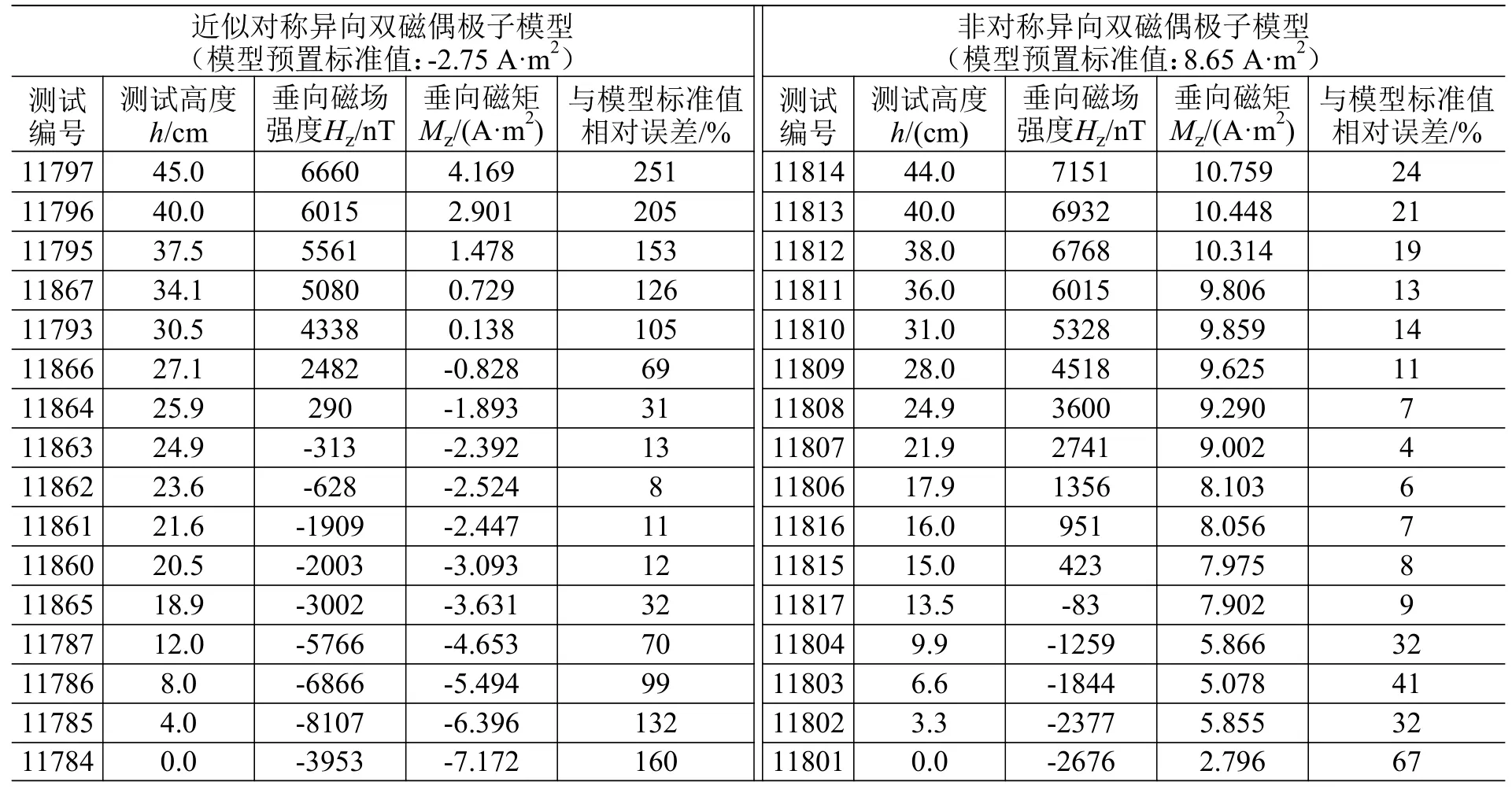
表6 不同传感器高度下异向双磁偶极子模型垂向磁场、磁矩变化值Table 6 Values of vertical magnetic field and magnetic moment for antidirectional double magnetic dipole model at different sensor heights

图8 近似对称和非对称异向双磁偶极子模型Fig.8 Approximate symmetric and asymmetric antidirectional double magnetic dipole model

图9 不同传感器高度下异向双磁偶极子模型垂向磁场和磁矩变化曲线Fig.9 Curve of vertical magnetic field and magnetic moment for antidirectional double magnetic dipole model at different sensor heights
表6 和图9 表明:从模型起始位O至顶端40 cm处,不同高度下,近似对称和非对称异向双磁偶极子模型的垂向磁场强度Hz(R1=0.56 m 处)变化范围分别为-3953~6660 nT、-2676~7151 nT;垂向磁矩Mz变化范围分别为-7.2~4.2 A·m2、2.8~10.8 A·m2;与模型预置的标准值相比,垂向磁矩Mz测得结果相对误差范围分别为8%~251%、4%~67%;两种模型垂向均捕捉到磁赤道面,并发现在磁赤道面区域的测试结果更加接近于模型预置的磁矩值,相对误差最小,磁赤道上下1/10 试件高度测试区域内,测得结果误差可控制在15%以内。
4.4 组合态多磁偶极子模型及仿真测试结果
组合态多磁偶极子模型1 和模型2 如图10 所示,不同传感器高度下模型垂向磁场和磁矩变化值见表7,变化曲线见图11。
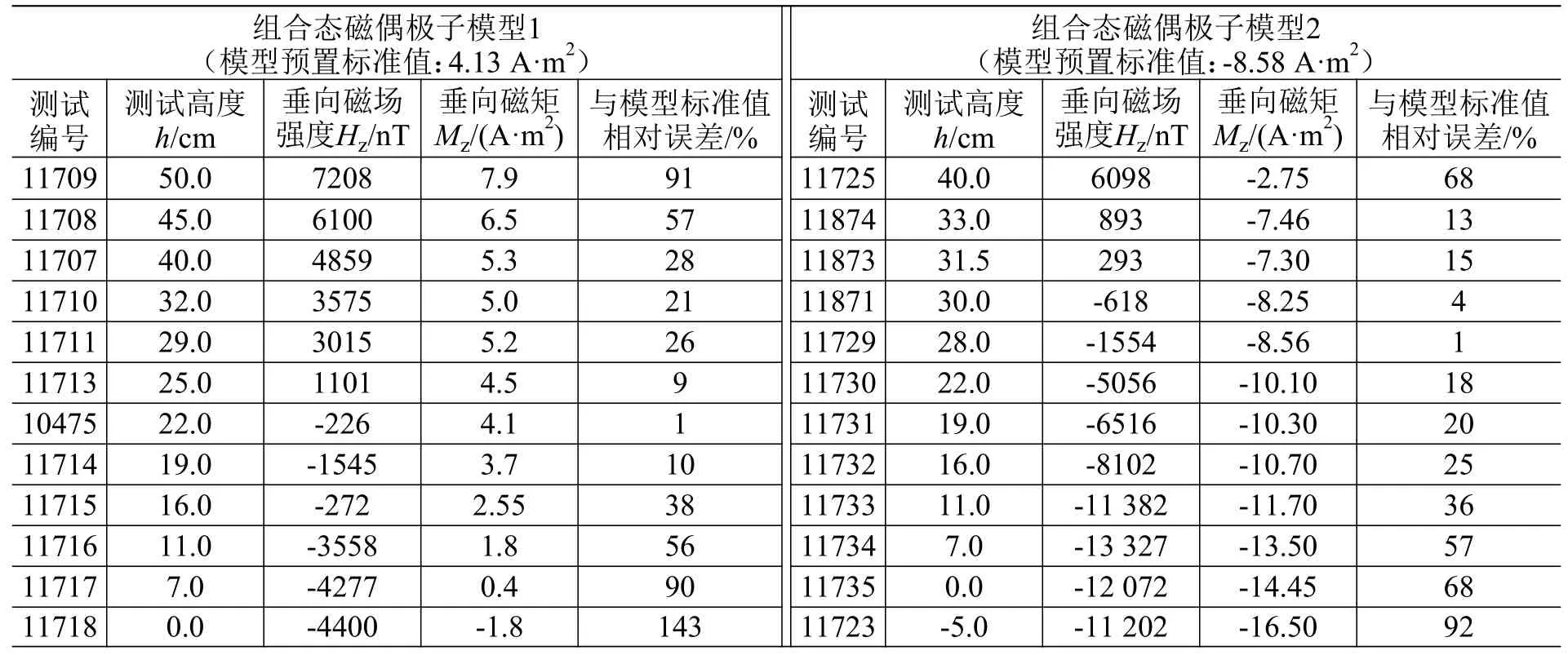
表7 不同传感器高度下组合态多磁偶极子模型垂向磁场、磁矩变化值Table 7 Values of vertical magnetic field and magnetic moment for combined multipole model at different sensor heights

图10 2 种组合态多磁偶极子模型Fig.10 Two combined multipole magnetic models

图11 不同传感器高度下组合态多磁偶极子模型垂向磁场、磁矩变化曲线Fig.11 Curve of vertical magnetic field and magnetic moment for combined multipole model at different sensor heights
表7 及图11 表明:从模型起始位O至顶端40 cm处,不同高度下,两种组合态多极子模型——模型1和模型2 的垂向磁场强度Hz(R1=0.56 m 处)变化范围分别为-4400~7208 nT、-13327~6098 nT;垂向磁矩Mz变化范围分别为-1.8~7.9 A·m2、-16.5~-2.75 A·m2;与模型预置的标准值相比,不同高度下垂向磁矩Mz测得结果误差范围分别为1%~143%、1%~68%;两种模型垂向均捕捉到磁赤道面,并发现在磁赤道面区域的测量结果更接近于模型预置的磁矩值,相对误差最小,磁赤道上下1/10 试件高度区域内测量结果误差可控制在15%以内[11]。
4.5 小结
1)单磁偶极子及同向双极子分布模型,在模型全高度测试范围内,垂向磁场强度不会呈现磁赤道面特征。
2)异向双磁偶极子及异向多磁偶极子组合态模型,在模型全高度测试范围中的某一高度下,垂向磁场强度会呈现磁赤道面特征。
3)与预置的标准磁矩相比,磁赤道上下1/10 试件高度测试区域内,所有模型磁赤道面区域磁矩测量结果相对误差均小于15%。
4)对比3.4 节结果,大磁矩航天器垂向磁矩分布特征接近于异向多极子组合态模型2;其磁赤道面出现在3.4 m 区域;其垂向磁赤道区域磁矩测试结果约为66 A·m2,按有效值与标准模型最大相对误差15%计算,其垂向磁矩有效范围为56.1~75.9 A·m2。
5 结束语
本文通过全高度分层次巡测方式获取航天器整器垂向磁场分布特征,并利用标准磁矩模型仿真测试加以佐证,证明磁赤道区域获取的磁矩结果最接近航天器整器垂向有效真实磁矩值。所述磁柱面作图法获取航天器垂向有效磁矩方法已成功应用于非常规类大磁矩航天器磁矩测定,有效改善了大尺度、大磁矩航天器垂向磁矩测试误差及其裕度控制范围,工程上解决了该类航天器垂向磁矩测试误差大、测试结果无法有效评估的技术难题,并可为其他类似中、大尺度航天器磁矩测试提供参考。
猜你喜欢
陶瓷科学与艺术(2021年7期)2021-12-09
航天制造技术(2018年3期)2018-07-07
北京航空航天大学学报(2017年9期)2017-12-18
自动化学报(2017年5期)2017-05-14
中国惯性技术学报(2015年1期)2015-12-19
核技术(2015年10期)2015-12-13
深圳大学学报(理工版)(2015年6期)2015-11-26
物探化探计算技术(2015年2期)2015-02-28
上海航天(2014年1期)2014-12-31
河南科技(2014年23期)2014-02-27
