
基于微重力模拟实验的在轨维修时间预计修正方法
2023-11-14 07:40:46宋子骋郭子玥康子旭帅松良赵轩毅
航天器环境工程 2023年5期
李 语,周 栋*,宋子骋,郭子玥,康子旭,帅松良,赵轩毅
(1.可靠性与环境工程技术国防科技重点实验室; 2.北京航空航天大学 可靠性与系统工程学院;3.虚拟现实技术与系统国家重点实验室; 4.北京航空航天大学 计算机学院:北京 100191)
0 引言
2022 年11 月29 日,“神舟十五号”载人飞船的成功发射,标志着中国空间站的建设进入收官阶段。3 位航天员将在轨工作生活6 个月,在此期间不仅要完成各项科研任务,还需要进行空间站的日常维护和在轨维修。
在轨维修是提高载人航天器使用寿命,使系统在寿命周期内保持高可靠性的必要手段[1]。目前,在轨维修主要有舱内(intravehicular activity, IVA)、舱外(extravehicular activity, EVA)和舱外机械臂(extravehicular robotics, EVR)3 种方式[2]。“和平号”空间站在轨运行15 年间,航天员有75%的工作时间用于在轨维修[3]。在国际空间站建造和运营期间,舱内维修总时长约2536 人·时,舱外维修总时长约421 人·时,相当于航天员每个工作日的维修时长为1.9 h,非工作日的维修时长为1.8 h[4-5]。对于即将完成建设的中国空间站而言,在轨维修已成为驻站航天员必须执行的日常任务。若在轨维修时间过长,不仅会消耗航天员的体力及精力,也会影响到其他科研任务的按时顺利开展。同时,在轨维修需要相应的维修保障资源支持,而空间站内空间有限,必须准确地度量及预计在轨维修时间,以便提前运送所必须的维修保障资源,并在特定的发射周期内安排适当的在轨维修任务。
目前,在轨维修时间预计方法主要有基于经验和基于动作分配2 种[4]。基于经验的在轨维修时间预计方法主要以地面维修时间为基准,对于相同或者相似的维修任务,空间站中在轨维修时间会以地面维修时间的2 倍来粗略估算。显然,这种方法仅基于简化的经验假设,并未考虑在轨维修和地面维修的具体差别,对维修时间的预估不准确。基于动作分配的在轨维修时间预计方法是以人为规定的维修时间为标准,通过已知数据来预计每天的维修时间。但是,这种基于已知数据而人为规定的维修时间可能受到个人经验、技能水平、工作效率等主观因素的影响,并且不能对不同的维修任务和单个的维修任务时间进行预计。此外,这2 种方法都忽略了微重力环境对在轨维修时间的重要影响,无法全面体现微重力环境对航天员生理、认知和维修视觉可达性的影响。
基于上述现有在轨维修时间预计方法存在的问题,本文借鉴地面上的动作时间方法思路[6-7],提出一种在轨维修时间预计修正方法,利用中性浮力水槽模拟微重力环境的特点,对在轨维修基准动作时间进行修正,既可以建立在轨维修操作基本动作的时间标准数据,也能为未来维修任务的时间预计提供参考。
1 微重力下的维修动作
空间站的维修任务主要包括检查和监视、日常维护和应急反应3 大类[8],参见表1。航天员进行舱内维修的时间超过40 h/月,其中日常检测时间在12 h/月以上,包括检测舱内空气质量、光线、声音级别和视频安全等;同时必须应对紧急情况,包括发现和维修泄漏、可燃物等。空间站上有多台摄像机承担观察和监视等任务[9],而维修人员必须手动摆放摄像机镜头的位置。

表1 空间站维修任务Table 1 Space station maintenance missions
航天员是维修活动的主体和核心,微重力环境对人体生理、认知和维修视觉可达性的影响会导致航天员的身体形态、操作能力、肌肉力量以及认知决策的改变,例如微重力环境会使维修人员力量下降,从而无法长时间从事需要较大力量的工作,且会导致航天员的信息处理机制(触觉、痛觉、视觉等)接受、处理和反应速度减慢,限制其在短时间内处理多任务和突发事件的能力,也不适宜航天员长时间集中注意力或持续进行无法中断的工作。综上,微重力环境的影响使得航天员在轨维修活动与地面上的维修操作存在明显差异,需要考虑这些影响因素来制定适合微重力环境下的维修动作分类和时间标准,以提高在轨维修时间预计的准确度。
1.1 微重力下维修动作过程
一般来说,一个完整的维修过程分为人体移动过程、维修姿态调整过程和维修操作过程(图1),包括很多子维修任务,如接近维修目标、检测隔离、更换等。这些任务不仅包含维修人员的维修活动,还包含维修人员不能控制的时间,如隔离时间。从本质上讲,维修活动是由一连串的动作组成的,可以利用动作时间方法的原则将这些动作分解成一些基本的动作单元。
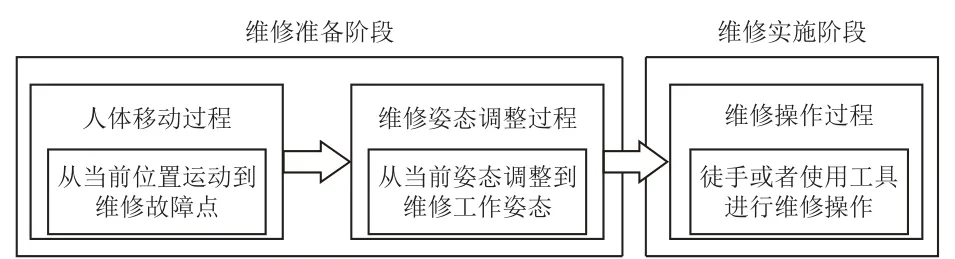
图1 维修过程分解Fig.1 Decomposition of maintenance process
在实际飞行任务中,航天员主要有2 种运动状态,即:有约束或支撑的运动状态,比如被座椅和脚限位器束缚、用绳索固定双腿或用手扶住扶手等;无约束无支撑的自由漂浮状态[10]。本文只讨论舱内、有约束或支撑的航天员维修动作和行为。
1.2 微重力下维修动作分解
微重力下维修动作包括维修人员的移动、姿势调整和维修操作(徒手或使用工具),如图2 所示。考虑到在微重力环境下,维修人员必须先固定住自己才能执行维修动作,因此在空间站微重力环境下要花费大量的时间进行维修姿态调节,先从漂浮姿态调整为中性姿态,再从中性姿态转换到用限位器和固定绳固定身体的维修姿态。

图2 微重力下维修动作分解Fig.2 Decomposition of maintenance actions in microgravity
通过对航天员实际在舱内的维修操作进行分析,建立了8 类维修运动模型,分别是舱内轴向运动、舱内横向运动、舱内爬行、舱间物品转移、舱内物品转移、航天员手部操作维修工具、插拔电连接器和拨动开关。表2 对航天员有约束的动作姿态进行了总结,其中最为常见的有约束维修姿态是身体固定住、上肢做动作,一般的维修拆装、插拔电缆和检测调试都采用的是这种动作姿态。

表2 有约束的动作姿态Table 2 Constrained action postures
2 在轨可修系统维修时间预计修正方法
2.1 动作时间方法
动作时间方法是通过对具有普遍和代表性的动作进行动素分解,利用对于动作的影片分析和时间研究,得到最基本的动作单元时间。这种基准动作时间可以作为时间消耗的标准,包括了几乎所有的人体形态动作时间。动作时间方法使得可以不用额外的观测和测定时间,直接根据作业过程进行动作分解,然后查表得到每个动作对应的时间,再经过简单的累加即可得到完成该作业所需的时间[11]。
目前动作时间方法已被广泛应用在航空航天、制造业和其他领域的维修时间预测中,如Chen等[12]提出了一种考虑维修行动要素(maintenance action elements, MAEs)和模块化预定时间标准(modular arrangement of predetermined time standards,MODAPTS)的维修时间估计方法,通过将维修任务分解为不同的基本单元进行初步的时间估计,并分析了MAEs 与维修性之间的关联关系,以弥补人、机器和环境之间交互所需的额外时间。
人机工效学的研究表明,动作速度过快会导致能量消耗高,人容易疲劳;而动作速度太慢,能耗也会加快[13-14]。动作时间方法旨在以能耗最低的速度作为基准动作的速度,得到每个基准动作的时间。
一个维修任务包含多个维修活动,分别对应不同的维修动作和动素。如图3 所示,一段维修任务被分为任务层、作业单元层、动作单元层和动作元素层4 层。其中,动作元素层中的基本动作是最为重要的,每一段维修任务都可以这样被分解成许多个动作元素[12]。本文的研究目的就是要测定出微重力下基本动作元素的标准时间。

图3 维修任务分解Fig.3 Decomposition of maintenance tasks
动作分析的基准时间单位因预定时间标准的类别不同而不同,例如,工作因素动作时间标准采用0.006 s 作为时间单位;MTM 标准采用0.036 s 作为时间单位;模特法采用1MOD=0.129 s 作为时间单位。本文主要基于关节运动来建立微重力下的动作时间准则。
2.2 基于关节运动的维修时间预计修正方法
2.2.1 动作的时间因素
目前已有的动作时间方法忽视了影响动作时间的关键因素——微重力,因此并不适用于空间站中的维修时间度量。在进行动作分析时,动作的时间会受到很多不确定因素的影响,首先要明确微重力下影响动作时间的变量以确定维修基本动素的时间。下面列出3 种决定动作时间的主要因素。
1)执行动作的人体部位
由于人体活动部位的功能和构造不同,所以不同部位的动作速度也不同。在维修操作中,手部、手臂和身体其他部位的动作速度明显不同。本文主要研究的是维修操作中应用最多的手部动作。
2)动作距离
对于一些以关节为旋转支点的活动,活动距离越大对应的关节活动角度就越大,绕着关节活动相当于做圆弧运动。动作距离的测定以基准点的轨迹为依据,表3 是身体各活动部位动作距离的测定基准点。
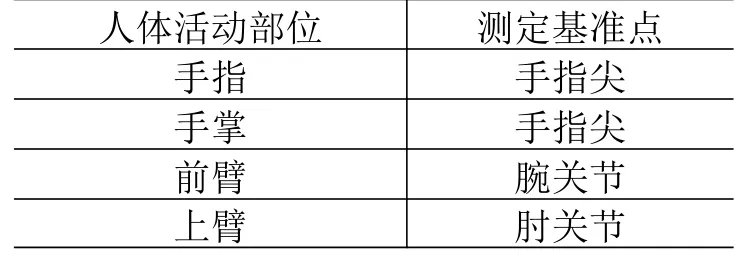
表3 人体活动部位测定基准点Table 3 Reference point for measurement of human body moving parts
3)微重力
相比于地面上动作时的重力和阻力,微重力对于关节动作的影响较小,但会使航天员肌肉力量退化、骨量丢失,并且微重力对维修动作的影响反映在使人的认知、动作延迟,在模拟实验测定之后要加上相应的延迟时间,才能得到适用于空间站的动作基准时间。
2.2.2 动作时间公式
舱内基本维修作业时间包括维修人员的移动、姿态的调整以及上肢/手部操作等。其中手部的操作最为复杂,其动作会并行地进行,各个关节协调控制动作完成。维修任务的时间T采用累计时间方法进行计算,串行作业的维修时间等于串联的基本维修动作作业单元时间的累加值,并行作业维修时间为各项并行动作中单元作业时间的最大值,即
式中:ti为该维修任务中第i项维修动作的时间;m为每项维修任务中并行动作的总数;n为总的维修动作步数。
微重力下的维修动作可以分为以下3 类:
1)移动类。微重力下的移动时间为
式中:s为维修人员到维修地点的距离;v为空间站中维修人员漂浮移动的平均速度。
2)姿态调整类。维修人员在微重力下进行维修时,必须手握舱壁上的扶手、使用脚限制器或者用固定绳索固定住身体,因此需要有额外的姿态调整时间。例如维修人员可能是横向漂移到达维修目标的位置,为了稳定身体并保持相对于维修目标的位置,维修人员通常会利用固定装置,以从横向漂移姿态调整为稳定的中性姿态。这些额外的姿态调整步骤也是微重力下维修动作的关键部分。微重力下维修姿态调整的总结见表4。
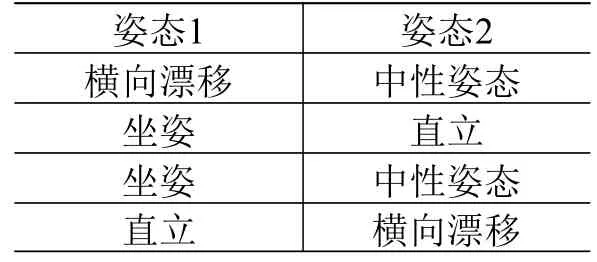
表4 微重力下维修姿态调整Table 4 Maintenance posture adjustment in microgravity
3)手部维修操作类。对于手部的维修动作不能简单地利用动作距离来度量动作时间,因为手部动作随机性大、动作数量多、运动关节多且呈曲线,不适合简单利用原来的时间比率来计算。从人体关节的单调操作运动的级别得到:手指关节、腕关节、肘关节和肩关节的灵活度依次逐渐下降,它们对应的关节自由度在相同变化时耗费的时间依次增加;再结合关节运动角度范围,可以确定4 种不同的基础动作级别。微重力不会影响关节旋转角度的大小,并且各个关节的旋转角度是一定的。
在维修操作过程中,4 个关节会一起协调控制整个操作活动,结合参与关节动作的节段将单调操作运动分为大臂、小臂、手掌和手指4 个级别。每个节段以其关节点为原点做旋转运动,每个关节在一定的旋转角度范围内活动。表5 为动作过程中各个关节的活动类型和活动角度。

表5 各关节活动类型和角度Table 5 Types and angles of joint movements
以虚拟仿真软件DIAMIL 中虚拟人物的肩关节动作为示意,展示肩关节对应的3 种不同的姿态变化,如图4 所示。
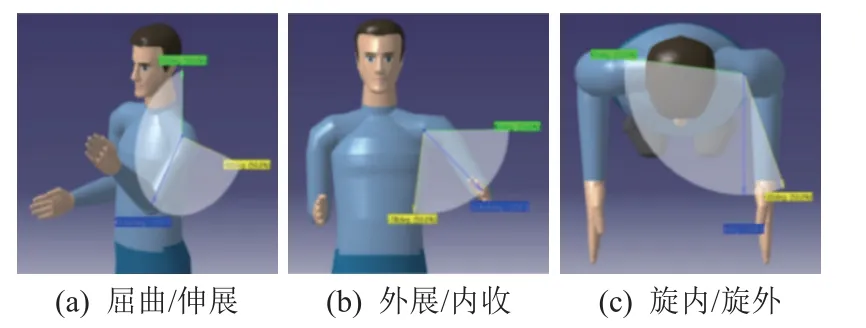
图4 肩关节姿态变化Fig.4 Posture changes of shoulder joint
在操作过程中,动作过程一般是以某个关节为核心进行,因为手臂的特殊关联结构,其他的关节部位也会随之动作,不过动作的幅度偏小,但会对动作的基准时间计算带来干扰。模特法中把这种过程称为并行动作,在计算动作时间时取较短的时间作为时间单元计算,但这样的计算方法缺乏准确度。对于这类动作时间的计算,首先需要确定动作的基准位置,然后给出基准动作时间单元。因此,在确定基准动作时间实验之前,需要给出各个操作部位的分类确定方法[15]。
首先,计算圆心角弧长
参照模特法的研究思路,可以把手部动作分为4 种:
1)指关节动作M1,以指关节为坐标中心,手指绕指关节屈曲和外展;
2)腕关节动作M2,以手腕关节为坐标中心,包括整个手掌的动作;
3)肘关节动作M3,以肘关节作为坐标中心,包括前臂、手掌和手指的动作;
4)肩关节动作M4,以肩关节为坐标中心,包括整个上臂的动作,其他关节可以小范围动作。
根据每个关节测定基准点(见表3)的移动范围来确定关节动作的判断指标,结合之前的研究对于各关节的活动角度与旋转角度的转化公式[16]为
式中θ为以关节为中心点的旋转角度。最终计算出肩关节、肘关节、腕关节和手指关节的活动角度范围和各关节动作时指尖活动的距离,各个关节的判定标准如下:
4.好题。有的题包含了很多解题思路和数学思维,比如一题多解的题、有巧妙解法的题等,都可以算作好题,这类题,如果老师经常强调,或者对自己而言是很不错的题,也可以摘录进去。
指关节的活动判定标准为
腕关节的活动判定标准为
肘关节的活动判定标准为
肩关节的活动判定标准为
根据每个关节动作的判定标准,通过模拟实验来确定每个关节部位的单调动作时间tMOMi,将确定的tMOMi累加即可得到操作运动的时间
3 模拟实验
3.1 模拟实验设计
目前,在地面上模拟微重力环境的方法主要有失重飞机、悬吊及水下浮力3 种。失重飞机是通过做短暂的抛物线飞行来获得失重;悬吊模拟是施加一个与重力方向相反的力来获得失重;水下浮力是通过在水下对人员和服装实施配重,使得人所受浮力和自身重力抵消达到平衡,可以有效模拟航天员在太空失重状态下的维修操作[16]。美国、俄罗斯、中国和欧盟等都建有中性浮力水槽来模拟微重力,中性浮力地面模拟允许人员直接参与,实验条件与空间真实环境条件几乎相同,参与人员感受直观,并且可进行长时间试验,因此得到广泛的应用。考虑实验室的条件,利用中性浮力水槽来模拟微重力开展动作时间测定较为妥当。
微重力下的3 大类维修动作(人体移动、姿态调整和手部维修操作)中,手部维修操作是最为频繁和复杂的。对于手部的动作实验主要分为手指绕指关节的移动、手掌绕着腕关节的移动、小臂绕着肘关节的移动和大臂绕着肩关节的移动。考虑到中性浮力水槽中动作的可行性,本文对于人体移动和姿态调整动作只是给出实验思路和计算方法,水下模拟实验只针对手部的关节动作进行基准时间测定。
3.1.1 实验人员
实验人员根据中国航天员人体形态参数测量结果选取,即身高在1.67~1.76 m 之间的在校大学生5 人。具体参加本实验人员的身体各部位信息如表6 所示。

表6 实验人员身体各部位数据统计Table 6 Experimenters’ body part statistics单位:cm
3.1.2 实验器材
实验的中性浮力水槽采用的是标准游泳池,为安全考虑,只在水深1.2 m 和1.5 m 的区域完成动作。其他实验器材包括刻度尺、秒表、水下摄影机、防水袋、基本的游泳装备以及基本的维修工具。其中维修工具(见图5)均使用塑料制品模拟,材质密度和水一致,从而抵消工具自身的重力以达到更加接近微重力下使用的效果。

图5 模拟维修工具Fig.5 Tools to simulate maintenance
3.1.3 实验过程
动作实验的主体思路是要让手部操作的基本动作单元在微重力环境下进行,因此实验时手部要完全浸泡在水中;动作要遵守最低能耗原则,平稳匀速。当测定关节动作的基准时间时,实验人员在不使用任何工具的情况下独立进行关节动作;同时要做到关节的角度和移动范围合理,满足2.2.2 节中规定的关节动作要求。
实验人员每个关节动作连续进行5 组并记录动作时间,即每个关节(5 名实验者)的动作时间共有25 个记录值。包括指关节动作、腕关节动作、肘关节动作、肩关节动作。
3.2 实验数据处理
将所有实验人员的动作时间数据进行汇总,统计极值及极差,并对所有相同关节的动作时间数据计算5%、50%、95%分位数以及平均值、标准差,计算腕、肘、肩关节与手指关节动作时间的相关系数,如表7 所示。从表中可以看到,关节灵活度的规律在微重力下和地面上有相同的特性,即指关节、腕关节、肘关节和肩关节的灵活度依次下降,动作需要时间依次增加。指关节和腕关节的动作时间的稳定性最好;而肩关节的动作幅度较大,因此动作时间较为分散。由指关节与腕关节、肘关节和肩关节的动作时间相关系数可知,微重力下的关节动作时间与指关节动作时间没有明显的相关性,即微重力导致了地面上相互关联的关节动作之间的解耦,因此地面上的动作时间方法并不适用于微重力环境下,需要对每个关节动作进行基准时间测量。

表7 微重力下动作时间数据分析Table 7 Data analysis of action time in micrograrity
将所有数据绘制成散点图(如图6 所示),可以看到,不同的关节动作时间具有明显的差别,有很好的区分度,可以取每个关节各自的动作时间平均值作为微重力下的标准动作时间数据。

图6 各个关节动作时间分布散点图Fig.6 Scatterplot of time distribution of joints’ actions
因此,以每个关节25 组动作时间数据的平均值作为标准时间,即
其中,tMOM1~tMOM4依次为指关节、腕关节、肘关节和肩关节动作时间。
3.3 模拟实验验证
为了验证水下实验得到的关节动作标准时间的准确性,需要进一步的维修活动实验。本次验证实验的内容为在水中拆卸1 个螺母,该维修过程主要集中在手部的操作,不涉及维修人员的移动和姿态调整。实验过程动作流程分析细节如下:
1)动作1——手握着维修工具,肩关节和肘关节一起带动手接近待拆卸螺母;
2)动作2——工具套上螺母后,以肘关节为中心进行旋转动作,其他关节基本保持不变状态,旋转1 周;
3)动作3——待螺母松动后,直接用食指和大拇指拧下螺母。
这一整段的维修时间从肩关节开始移动到螺母完全被拧下结束,视频记录时间从00:00:14 到00:00:42,即维修操作时间为28 s。分别将地面上的模特法计算方法和本文提出的改进的动作方法与实验记录的维修操作时间对比,具体数据见表8。
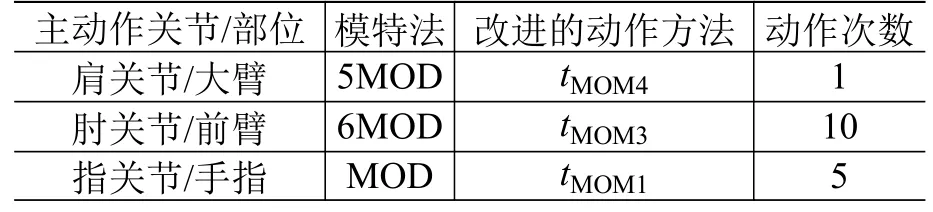
表8 维修时间计算数据Table 8 Maintenance time calculation
利用式(9)计算得到的基于模拟实验动作时间方法的维修时间为T总=tMOM4+10tMOM3+5tMOM1=26.12 s;地面上的模特法计算,T总=5MOD+10×6MOD+5×MOD=70MOD=9.03 s,再根据工程经验乘以2 倍,得到维修时间为18.06 s。可以看出,地面上的模特法计算出的维修时间与真实值差异较大,本文提出的改进的动作方法的计算结果更加接近真实值,具有一定的参考价值。
4 在轨基准时间修正
目前,根据模拟实验已经得到模拟微重力下的基准动作时间。以关节的活动角度和移动范围来确定主动关节的方法能更加准确地测定维修任务时间。但是,水下的微重力和空间站的微重力环境仍存在较大差异,主要体现在:
1)人在水中动作时水平方向存在阻力,而空间微重力下没有。
2)长期的空间站环境下,航天员的协调运动能力和空间识别能力会受到影响。
3)长期在轨飞行使航天员对于各类信号的反应时间延长,NASA 已有研究给出的定量数据为:声信号反应时间延长100 ms,视觉反应时间延长120 ms,选择反应时间延长1 s。
这些都无法在地面的中性浮力水槽中准确地模拟出来,不过,对于在轨的基准动作时间,可以认定水中阻力造成的速度减慢和航天员的生理变化带来的动作延迟对于动作时间的影响都是很小的,且互为正负,在计算时可以一起忽略掉。因此,空间站中以关节为节点的动作时间可以认定为模拟实验得到的时间加上视觉、选择反应延长的时间。
基于上述分析,可以得到空间站中以关节来区分的指关节、腕关节、肘关节和肩关节的基准动作时间单元为实验测定的关节动作基准时间的平均值(如式(10)所示)加上由于微重力造成的延迟时间1.22 s,即
其中:tMOMf为指关节动作基准时间;tMOMw为腕关节动作的基准时间;tMOMe为肘关节动作的基准时间;tMOMs为肩关节动作的基准时间,并且都满足2.2.2 节中的动作范围。
5 结束语
本文提出了一种修正的在轨维修时间预计方法,利用中性浮力水槽模拟空间微重力环境,通过模拟实验测定了手部多个关节的维修动作基准时间,对地面上常用的动作时间方法进行修正,并通过实验对方法的准确性进行了验证,最终确定了修正的在轨维修基准动作时间。
本方法的重点在于,通过模拟实验在已有预计方法上引入微重力对维修时间的影响,考虑了在轨维修任务的具体环境,可以为实际的空间站维修活动提供更准确的时间预计结果。同时,本方法确定的在轨维修基准动作时间可以为空间站的维修性设计和改进空间站的在轨维修流程提供参考。
猜你喜欢
军事文摘(2024年6期)2024-02-29 10:00:22
中学生数理化·八年级物理人教版(2023年6期)2023-05-25 11:59:34
军事文摘(2023年4期)2023-03-22 08:44:26
军事文摘(2022年18期)2022-10-14 01:34:16
实用手外科杂志(2022年2期)2022-08-31 09:48:02
军事文摘(2022年8期)2022-05-25 13:29:16
小哥白尼(趣味科学)(2019年10期)2020-01-18 09:16:14
军事文摘(2019年18期)2019-09-25 08:08:58
实用手外科杂志(2015年4期)2015-08-27 01:54:14
小猕猴智力画刊(2015年2期)2015-01-27 22:21:45
