
全动舵系统柔性多体动力学建模方法
2023-11-14 07:40杨执钧
航天器环境工程 2023年5期
杨执钧,张 忠,李 芮,高 博,郭 静
(1.北京强度环境研究所 可靠性与环境工程技术重点实验室; 2.北京强度环境研究所:北京 100076)
0 引言
全动舵系统是由舵机、传动机构与气动力作用下的弹性舵面共同形成的耦合系统,存在着流、固、电、磁等多物理场的耦合作用,可能在一定的条件下引发颤振失稳[1-3];而一旦发生颤振失稳,将会对航天飞行器造成非常严重的不良后果:结构的振动响应会被不断放大,甚至会造成结构破坏、飞行器姿态失控,乃至飞行失利。
目前国内外的相关研究主要集中于气动力对于舵面颤振特性的影响方面,常采用计算流体动力学/计算结构动力学(CFD/CSD)方法开展全动舵面气动弹性响应计算。针对舵轴间隙对颤振特性的影响[4-7],学者们多基于虚拟质量法把含间隙的非线性系统划分为3 个线性子系统,采用虚拟质量模态作为统一的坐标去表示各子系统。黄程德等[8]发展了基于CFD 和虚拟质量法耦合的间隙非线性气动弹性分析方法,发现全动舵面极限环幅值随着间隙角的增大而增大,且跨声速极限环的临界速度比线性颤振的跨声速凹坑下降20%。但基于虚拟质量法建模仅能考察舵轴间隙的影响,难以拓展到舵机等其他耦合系统。针对舵机对颤振特性影响的研究主要采用假设模态法,即将舵机系统简化为具有复刚度的弹簧系统[9-10]。Shin 等[11]对带有间隙环节和电动舵机的舵面进行了气动弹性分析,结果表明:考虑舵机动刚度与不考虑时计算得到的颤振速度和颤振频率均存在差别,而且非线性的影响会改变线性颤振特性,使得舵面出现极限环振荡现象。丁伟涛等[12]基于典型舵面二阶局部刚化模态和弹性模态建立了考虑舵机复刚度的舵系统动力学模型,研究热环境、电动舵机设计参数以及指令信号幅值对颤振速度的影响,并提出在舵机电流环加入超前滞后环节的颤振抑制措施。但将舵机简化为复刚度弹簧时,其机电耦合特性、传动特性等需进行线性化处理,会降低仿真模型与真实模型的匹配程度。
为了能够较为简单且有效地耦合舵机模型、舵轴间隙等因素的影响,本文采用刚柔耦合多体动力学方法建立典型舵面动力学模型,并采用地面颤振试验的集中式气动力模拟方法开展气动弹性耦合仿真,分析舵机模型、舵轴间隙等因素对动力学响应的影响。
1 全动舵系统建模方法
1.1 刚柔耦合多体动力学模型
多体动力学的研究对象是由多个具有运动学约束、存在大范围相对运动的刚性或柔性部件组成的复杂系统,主要研究内容是这类系统的动力学建模、计算和控制。对于构件在运动过程中同时存在弹性变形的问题,基于Craig-Bampton 方法[13],采用固连在结构体上的体坐标系运动来描述结构体空间大范围运动,相对于体坐标系来描述柔性变形引起的运动,从而建立能够考虑弹性变形与非线性大范围运动相互耦合影响的柔性多体动力学模型。刚柔耦合多体动力学模型为基于模态截断法获得的降阶有限元模型,假设有限元模型为
其中:M为有限元模型质量矩阵;K为有限元模型刚度矩阵;üd和ud分别为加速度矢量和位移矢量;F为载荷矢量。选取模型受外载荷点和存在位移约束点为边界点,将式中M、K的各行列重新整理,得到刚柔耦合动力学模型
其中,下标b 代表边界点,i 代表内部节点。通过Craig-Bampton 方法[13],保持边界点6 自由度刚体位移,其余节点位移采用模态化处理,则刚柔耦合动力学模型的位移矢量转化为
其中:η为边界点固定时的模态自由度位移;H为Craig-Bampton 转化矩阵,
其中:Ξ为边界点约束模态,由有限元模型刚体模态给定;Φ为固定边界点模态阵型,由有限元固定边界点后的弹性模态给定。
假设动力学分析频率最高为fmax,在H矩阵中对Φ阵型展开模态截断,仅保留模态频率低于fmax的模态,则刚柔耦合动力学模型的位移矢量转化为
其中: η*为降阶模态自由度位移;H*为降阶Craig-Bampton 转化矩阵。最终降阶子结构刚柔耦合动力学模型为
可获得降阶质量和降阶刚度的具体数值。
令
可将子结构动力学方程转化为状态空间方程的形式
其中:
1.2 舵轴间隙碰撞模型
建立多个子结构模型状态方程,以顶杆子结构X和舵轴拨片子结构Y为例,它们相互耦合时的位移及受力关系为
其中:下标u、ü代表由位移、加速度引起的内力;g为非线性映射关系;σ和 σ˙为子结构模型的相对位移和相对速度。
弹性接触问题采用罚函数模拟[14]。假设顶杆与舵轴的初始间隙为δ,顶杆与舵轴拨片发生碰撞的判断式为
当顶杆与舵轴拨片的相对位移满足该判断条件,则存在碰撞弹性力Fs与碰撞阻尼力Fd:
其中最大碰撞弹性力约束σmax和最大碰撞阻尼力约束 σ ˙max为人工定义参数,碰撞弹性力作用于顶杆与舵轴双模型上,且方向与碰撞点相反;而碰撞阻尼力仅作用于发生碰撞时相对速度较大的模型中。根据顶杆-舵轴拨片间隙碰撞模型,可由顶杆-舵轴拨片的相对位移σ和相对速度 σ˙,获得碰撞弹性力Fs与碰撞阻尼力Fd。
1.3 伺服舵机机电耦合模型
采用传递函数形式建立舵机机电模型,舵机输入电压信号V为伺服系统给定信号,负载转速ωB(减速齿轮的主动齿轮转速)与负载功率W的关系式为
其中,扭矩常数kt、反电动势常数kv和电阻R均为给定参数。
舵机系统传动模型采用传递函数形式建模,其中包含减速齿轮、滚珠丝杠和顶杆装置。包含摩擦影响的减速齿轮模型输出为
其中:ωB、ωF分别为主动、从动齿轮转速;rB、rF分别为主动、从动齿轮半径。从动齿轮的输出功率WF为
其中Wloss为摩擦损耗功率,
其中η为摩擦损耗系数,由人工指定。
滚珠丝杠模型输出为
其中:v为丝杠的平动速度;L为丝杠长度。假设滚珠丝杠为理想模型,则丝杠的输出功率与从动齿轮输出功率WF相同。
同样假设顶杆装置为理想模型且与丝杠连接处不存在间隙摩擦,则顶杆装置模型输出速度为v,输出功率与丝杠输出功率WF相同,此时顶杆的输出力为
舵机一般采用电流环、速度环、位置环三闭环控制,如图1 所示,电流环居内,速度环居中,位置环为最外环。电流环输入为舵机内电流,速度环输入为舵机输出速度,位置环输入为舵轴偏转角度,根据PID 控制算法调整相应控制参数,可令舵机伺服特性满足需求。
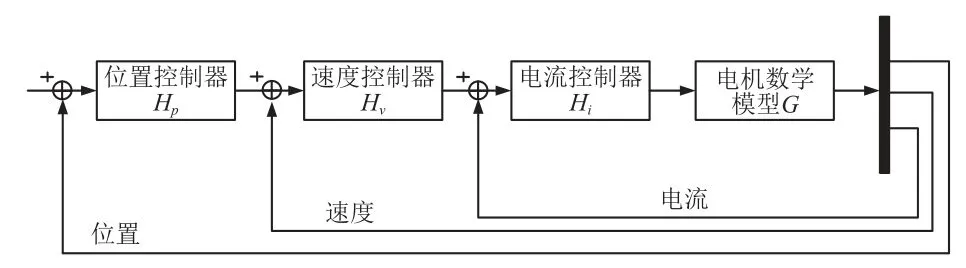
图1 伺服系统电机控制程序示意Fig.1 Diagram of the motor control program for servo system
1.4 集中气动力模型
基于偶极子网格法和最小状态法有理函数近似拟合获得[15]广义气动力模型的一般表达式
其中:s为拉普拉斯域变量;A0代表气动刚度;A1代表气动阻尼;A2代表非定常气动力表观质量;D、R和E为气动力响应系数矩阵;I为单位矩阵。根据1.1 节多体动力学模型中边界点选取获得边界点前n阶模态阵型为Ψ,其维度为n×N,其中N为舵面所受集中气动力个数。则舵面响应位置上所受集中气动力为
2 全动舵系统模型
本章验证采用刚柔耦合降阶模型建立典型舵面动力学模型的正确性,首先开展刚柔耦合降阶模型的静载荷激励下响应与商用有限元软件计算结果对比。
典型舵面的几何尺寸如图2 所示,据此建立的几何模型如图3 所示,其有限元模型如图4 所示,有限元单元个数为1375,节点个数为1460。
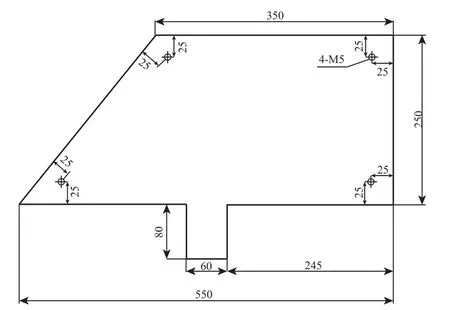
图2 典型舵面模型几何尺寸Fig.2 Geometric sizes of the typical rudder surface
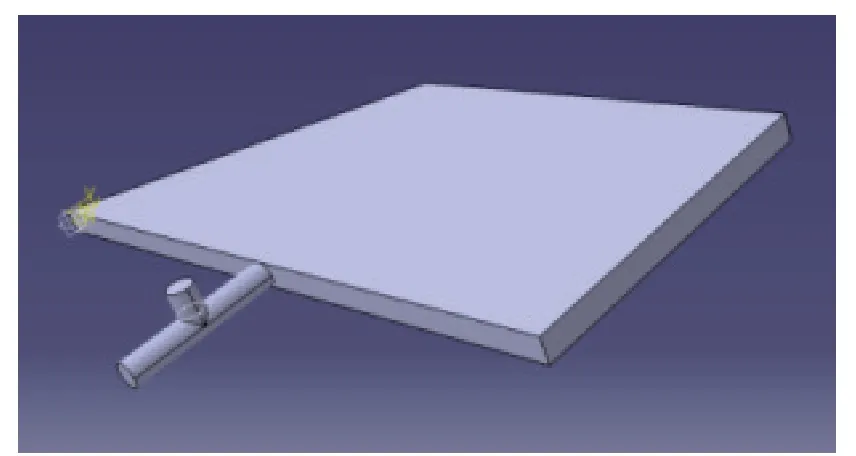
图3 典型舵面几何模型Fig.3 Geometric model of the typical rudder surface

图4 典型舵面有限元模型Fig.4 Finite element model of the typical rudder surface
根据有限元模型,固定节点后求解典型舵面模态振型,保留其前6 阶模态,构造典型舵面的刚柔耦合降阶模型。固定该模型舵轴处的自由度,给定舵面翼尖后缘静载荷激励,获得典型舵面翼尖后缘处节点的时域响应,并与商用有限元软件计算结果进行对比。为了提升计算效率并降低数值求解发散的概率,经不同算法对比后,本文基于刚柔耦合降阶模型的动力学数值算法均采用MatLab 中的变步长ode23t 算法。对比结果如图5 所示,基于Craig-Bampton 方法建立的典型舵面刚柔耦合降阶模型与基于商用软件建立的有限元模型之动力学响应间的偏差较小,证明了采用基于Craig-Bampton 方法建立典型舵面降阶模型的正确性。

图5 无阻尼典型舵面静载荷下时域响应的计算结果对比Fig.5 Comparison of calculation results for the time domain response of a typical rudder surface under static load with no damping
典型舵面边界点取6 个,以翼根前缘为坐标原点,6 个节点的坐标分别为(0, 0, 0)(550, 0, 0)(200,250, 0)(550, 250, 0)(280, -80, 0)(280, -40, 20),其中:节点1~4 为激振器激励节点,连接方式采用多体动力学连接模型;节点5 为舵轴拨片节点,与顶杆连接,开展无间隙仿真时连接方式采用线性多体动力学连接模型,开展间隙仿真时采用顶杆-舵轴拨片间隙碰撞模型;节点6 为舵轴根部节点,与支撑结构相连,连接方式采用多体动力学连接模型。
3 数值算例
3.1 全动舵面颤振结果分析
建立典型舵面计及阻尼的刚柔耦合降阶模型,其阻尼由如下比例给定,
其中,α取值为0,β取值为0.001。计及阻尼后,典型舵面基于偶极子网格法计算获得的颤振速度为1256 m/s,基于本文建立的颤振模型在不同来流速度下的时域响应如图6 所示,仿真获得颤振速度为1270 m/s,两者间的偏差仅为1.11%,证明基于刚柔耦合多体动力学建立的颤振模型精度符合要求。
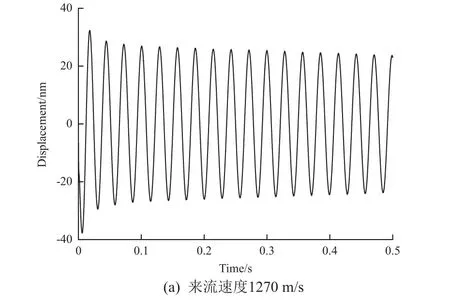

图6 典型舵面在不同来流速度下的第二阶广义位移时域响应Fig.6 Time domain response of the second-order generalized displacement of a typical rudder surface under different free stream velocities
3.2 计及舵轴间隙的全动舵面颤振结果分析
舵轴转动自由度释放自由,舵轴拨片与拨叉采用碰撞模型,拨叉保持固定,即舵机模型不参与耦合,碰撞距离δ设定为舵轴转动角度(0.38°),采用传感器检测舵轴角度θ和舵面4 节点位移x~,则舵面广义位移由各节点的修正位移x与模态逆矩阵相乘获得,各节点的修正位移为
其中l为节点到舵轴沿舵面的位移。
基于计及舵轴间隙的全动舵面颤振模型,典型舵面在不同来流速度下的时域响应如图7 和图8所示,可以发现:存在间隙时,在来流速度远低于颤振速度的工况下,全动舵面会产生结构极限环振荡现象(图7(a)、图8(a));在来流速度高于颤振速度的工况下,最初在短时间内出现既不收敛也不发散的结构极限环振荡现象,随后振动幅值逐步增大直至振荡发散(图7(b)、图8(b))。

图7 δ=0.38°时典型舵面在不同来流速度下的第二阶广义位移时域响应Fig.7 Time domain response of the second-order generalized displacement of a typical rudder surface under different free stream velocities for δ=0.38°
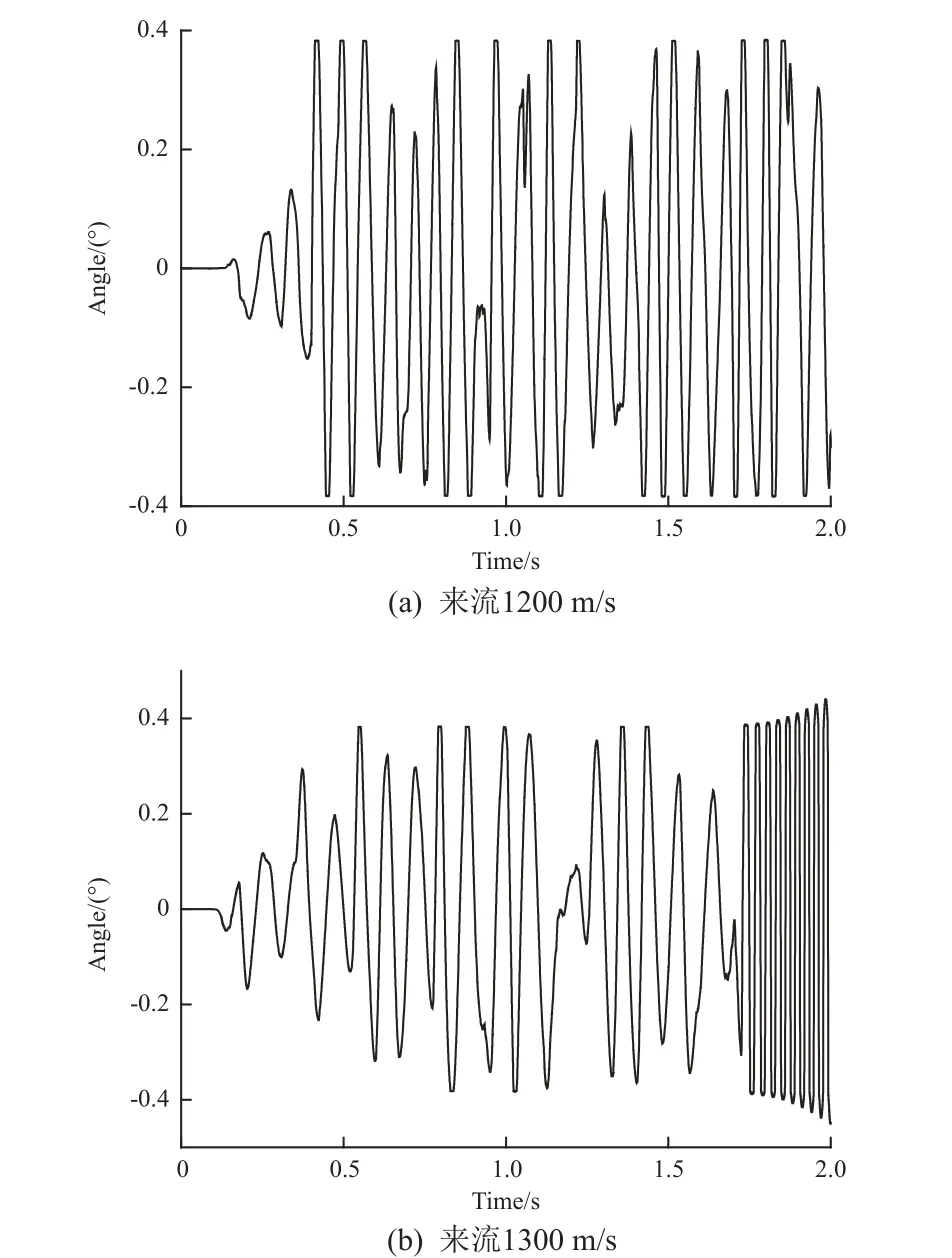
图8 δ=0.38°时典型舵面在不同来流速度下的舵轴转角时域响应Fig.8 Time domain response of rotating angle of a typical rudder surface under different free stream velocities for δ=0.38°
采用上述相同参数,碰撞距离δ设定改为0.95°时,基于计及舵轴间隙颤振模型,典型舵面在不同来流速度下的时域响应如图9 和图10 所示,可以发现:此时来流速度高于颤振速度后出现既不收敛也不发散的结构振荡,且并未随仿真时间的延长而出现振荡发散现象,推测产生该现象的原因是仿真时间较短。

图9 δ=0.95°时典型舵面在不同来流速度下的第二阶广义位移时域响应Fig.9 Time domain response of the second-order generalized displacement of a typical rudder surface under different free stream velocities for δ=0.95°
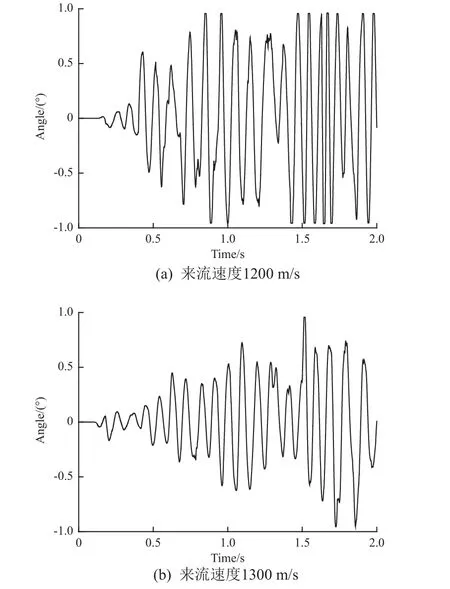
图10 δ=0.95°时典型舵面在不同来流速度下的舵轴转角时域响应Fig.10 Time domain response of rotating angle of a typical rudder surface under different free stream velocities for δ=0.95°
综上可知,存在舵轴间隙时,全动舵面会在来流速度较低时产生极限环振荡现象,但对于颤振现象的发生具有减缓作用,且随着间隙的增大,全动舵面产生颤振发散现象的时刻会推后。
3.3 全动舵系统颤振结果分析
随后开展舵机系统对于全动舵面颤振特性的研究,此时舵轴转动自由度释放,舵轴拨片与拨叉采用多体动力学连接模型,拨叉运动由舵机给定,舵机模型参与振动耦合。同样采用传感器检测舵轴角度θ和舵面4 节点位移x~,用于求解广义位移(参见式(23))。
基于全动舵系统颤振模型的不同来流速度下第二阶广义位移时域响应如图11 和图12 所示,分析发现:由于舵轴拨片未固定,采用伺服舵机驱动导致某些时刻出现舵轴转角偏离平衡位置较大距离的现象,并引发弹性振动幅值急剧增加;但随着舵轴转角逐步至0°,弹性振动的收敛和发散现象由来流速度决定。
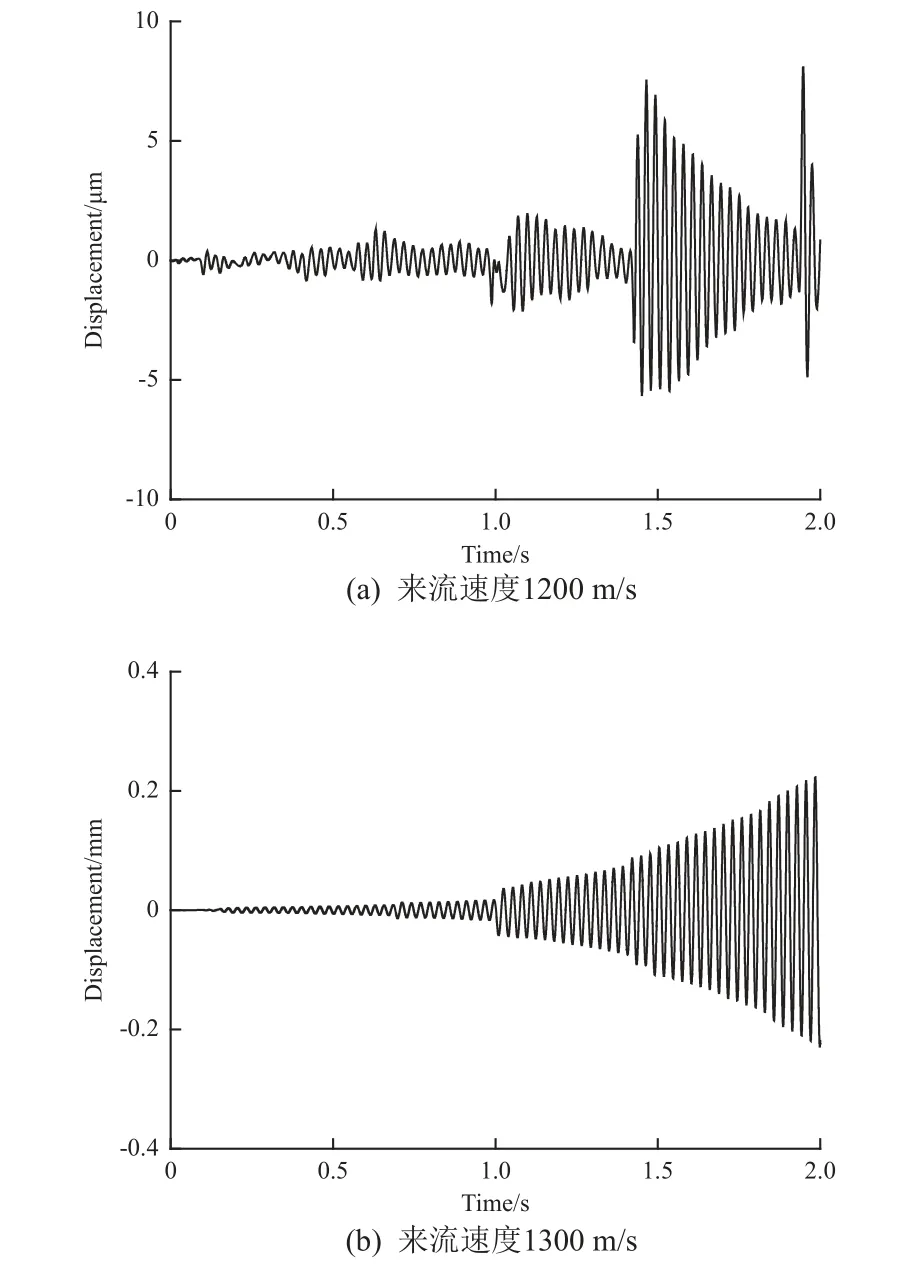
图11 全动舵系统在不同来流速度下的第二阶广义位移时域响应Fig.11 Time domain response of the second-order generalized displacement of an all-movable rudder under different free stream velocities
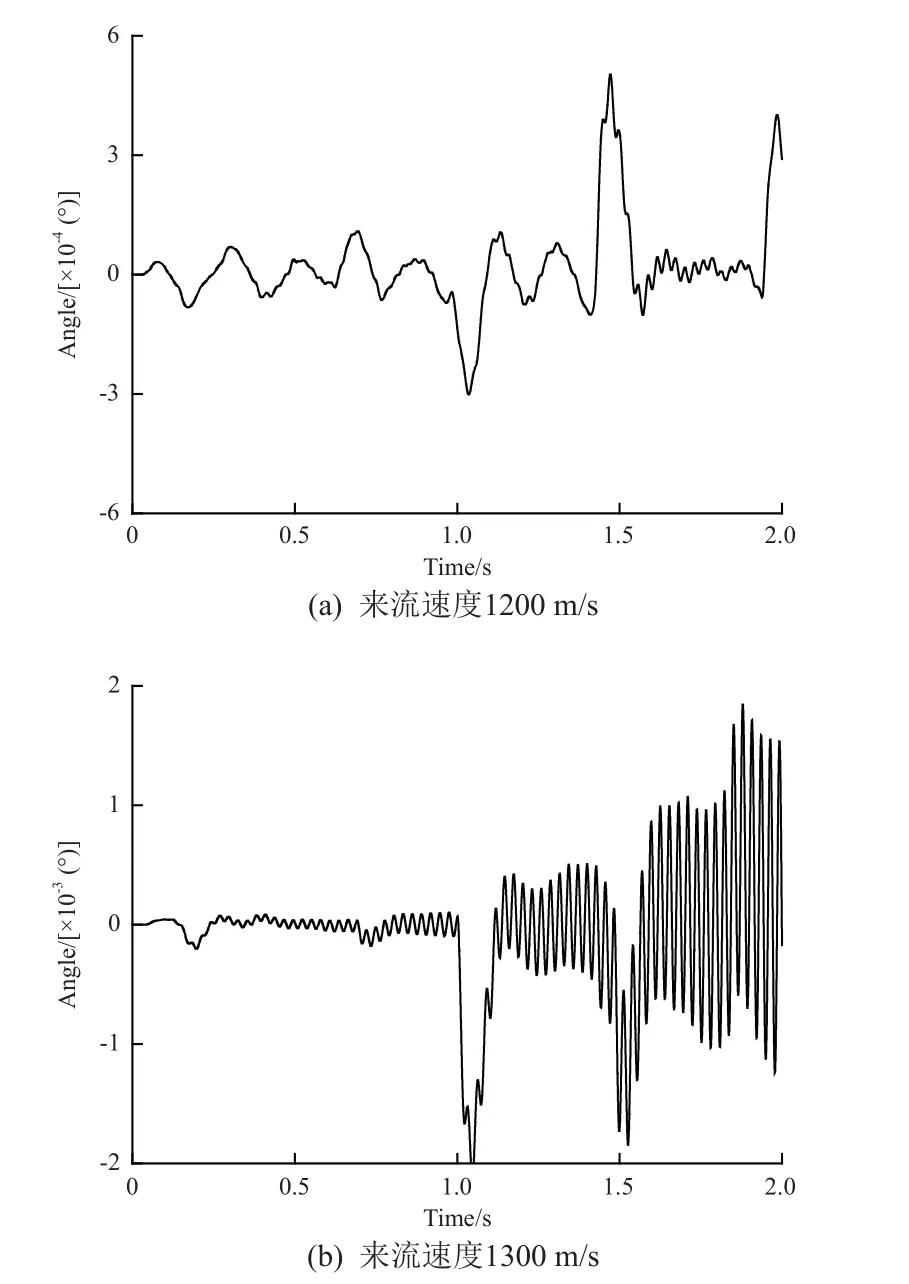
图12 全动舵系统在不同来流速度下的舵轴转角时域响应Fig.12 Time domain response of rotating angle of an allmovable rudder under different free stream velocities
仿真表明:在舵轴偏离平衡位置时,舵机伺服系统给定控制指令迫使舵轴偏转角度逐步靠近0°,该控制效果由舵机伺服系统的控制参数给定,因此伺服控制系统中参数调整不合理时可能加剧颤振现象的发生,甚至降低颤振速度。
4 结束语
本文基于柔性多体动力学方法建立全动舵系统颤振模型,采用Craig-Bampton 方法建立典型舵面刚柔耦合降阶模型,采用激振器式集中气动力模拟基于偶极子网格法获得广义气动力。数值仿真结果分析表明,该系统模型能够快速与间隙、伺服系统等多种模型相互耦合,适用于研究各种因素对全动舵面动力学响应的影响。本文主要研究舵轴间隙、舵机对全动舵面颤振特性的影响,得到主要结论如下:
1)采用Craig-Bampton 方法建立全动舵面动力学模型与激振器式集中气动力模型耦合可获得舵面颤振临界速度,且与商用软件预测对比的偏差小于2%;
2)全动舵面的舵轴存在间隙时,发生极限环振荡的临界速度远远低于模型不存在间隙时的情况,且来流速度大于颤振速度后,短时间内出现既不收敛也不发散的结构极限环振荡现象,且极限环振荡持续时间随着间隙增大而延长;
3)全动舵系统的舵机影响将导致某些时刻出现舵轴转角偏离平衡位置较大距离,由此引发弹性振动幅值急剧增加,意味着伺服控制系统中参数调整不合理时将可能加剧结构颤振,甚至降低颤振速度。
猜你喜欢
装备环境工程(2022年9期)2022-10-13
能源工程(2022年2期)2022-05-23
兵器装备工程学报(2021年12期)2022-01-11
水利规划与设计(2020年1期)2020-05-25
自动化学报(2019年6期)2019-07-23
智富时代(2019年2期)2019-04-18
智富时代(2019年2期)2019-04-18
电子制作(2018年1期)2018-04-04
制造业自动化(2017年2期)2017-03-20
飞行力学(2015年5期)2015-03-15
