
巡检机器人在钢铁企业的应用
2023-10-29 01:58郑建忠张志标旋石婵
机器人技术与应用 2023年5期
郑建忠 张志标 旋石婵
(广东中南钢铁股份有限公司,广东韶关,512122)
0 引言
通常,钢铁企业生产工序多、流程长,还需要有大量辅助工序。绿色、节能、低碳的智慧制造是钢铁企业的发展方向,钢铁生产过程存在大量脏(Dirty)、累(Difficult)、险(Dangerous)3D 岗位,可让机器人替代3D岗位进行操作。中国宝武钢铁集团有限公司表示,公司到2026 年将实现10000 台机器人的应用。本文对钢铁企业巡检机器人的适合应用情形进行分析总结,探讨如何发挥工业机器人的应用优势,以及需要解决的关键问题,为大规模的工业机器人推广提供借鉴参考。
1 巡检机器人概述
工业机器人是指可自动控制、重复编程、多用途、固定式或者移动式的具有3 个或3 个以上可编程轴的操作机器[1]。例如,巡检机器人、腿式机器人、桁架机器手、关节机器人等。
巡检机器人是搭载有多种类型的检测传感器,并按照一定程序,对巡检对象进行参数检测、状态诊断,完成设定功能任务,能够自主移动,具有环境感知能力的机器人工作平台。巡检机器人配备有探测和定位周围环境的传感器,能够自动充电[2],可以面向不同的应用场景,以及在复杂的气候或者地形条件下也能进行巡检作业。巡检机器人可以长时间工作不停歇,一些特定要求的巡检工作也可以采用遥控的方式进行巡检,其可灵活适应各种巡检任务。
2 巡检机器人分类
按照机械结构类型,机器人可分为轮式机器人、腿式机器人、双足机器人、履带式机器人、仿人机器人[1]。从移动形式看,笔者认为巡检机器人可分为轮式、轨道式、攀爬式[3-5]、飞行式[6-7]等。
2.1 轮式
依靠轮子移动的巡检机器人,一般分两轮驱动型或者四轮驱动型。其中,四轮的驱动能力和转弯灵活性比两轮更佳,具备四驱动四转向的巡检机器人可以原地转向[8]。轮式巡检机器人移动平稳、能耗小,移动速度和方向容易控制[9]。
图1 为中能智旷科技有限公司研制的RW-100 轮式室外电力巡检机器人。轮式机器人在巡检机器人中所占比例较大,国内多家机器人厂家都生产了此类产品。

图1 轮式巡检机器人
2.2 轨道式
对于在规划好路线的轨道上移动的巡检机器人,其具有定位精度高、移动安全、易于控制等特点[10],但由于只能沿着轨道移动,其运行轨迹固定,灵活性较差[11]。
图2 是合肥发源地智能科技有限公司研发的FYD/XD-1/HX 轨道式巡检机器人。轨道式巡检机器人在巡检机器人中的占比仅次于轮式巡检机器人,可在大多数巡检场合使用。

图2 轨道式巡检机器人
2.3 履带式
依靠履带移动的巡检机器人能够适应凸凹不平的路面以及松软的道路,甚至可以上台阶、过沟壑,但其转弯速度较慢,灵活性较差[12]。
图3 所示为中科开创智能科技发展有限公司研制的CSP-LD100A 轨道式巡检机器人,该机器人配备有角度可调高清摄像头云台、红外摄像仪、有毒气体传感器,点对点无线通信等。

图3 履带式巡检机器人
2.4 攀爬式
腿足型、仿生蠕动式、蛇型巡检机器人都属于攀爬式机器人[11]。其中,依靠一条或多条腿移动的腿足型机器人类似于动物的腿足,其在行动上较为灵活;仿生蠕动式机器人是通过径向伸缩的方式移动,因此行动比较缓慢;蛇型机器人的移动方式与动物蛇比较像,该类机器人由多个可扭动的单元块组成[3]。
图4 所示为新松机器人自动化公司研发的具有25 个自由度的蛇形臂机器人,臂总长2269mm,关节数为12,关节采用钢丝绳牵引驱动,柔韧性高,空间适应能力强,可在狭小空间内作业。

图4 蛇形臂机器人
2.5 飞行式
无人机空中巡检属于飞行式巡检。飞行式巡检在多个行业广泛应用,其中,在高压输电线路等电力设备巡检中尤其明显[7-8,13-17]。通过配置搭载无人机的平台,可增加无人机的续航和提高其适应环境的能力[6]。
图5 所示为深圳市大疆创新科技有限公司研发的御2行业进阶版无人机,其配置高清热成像传感器,支持32倍变焦,搭载RTK 模块可实现厘米级定位。

图5 飞行式巡检机器人
3 巡检机器人系统
巡检机器人系统由机器人本体、充电系统、无线传输系统、本体监控后台及辅助设施等组成。
如图6 所示,巡检机器人由机器人集中控制中心、电源管理模块、机器人运动控制模块、无线通信模块和信息采集单元模块等组成。其中,巡检机器人与控制中心通过无线通信方式交换各种信息[11],实现巡检任务规划、巡检控制、检测数据存储、数据分析应用开发及机器人学习功能训练等功能。
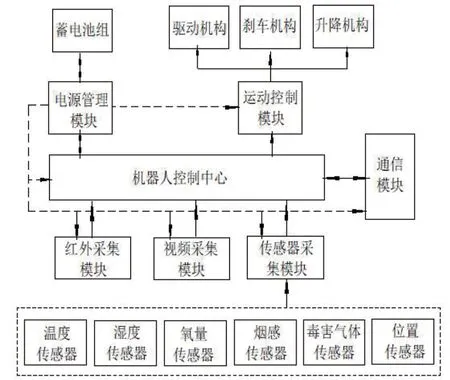
图6 巡检机器人系统
4 巡检机器人的导航定位
巡检机器人依靠定位或者环境地图进行导航,实现点到点移动和区域覆盖的路径规划,导航定位是完成巡检任务的基础。
4.1 常见定位技术
GPS(全球定位系统)卫星定位方法可提供连续、实时的三维空间、三维速度与时间信息。其中,民用GPS定位精度低,信号容易被设施遮挡或者受电磁信号干扰;WLAN(无线局域网)、ZigBee(紫蜂,无线短程网)、蓝牙等短程通信定位技术适用于短距离定位,其抗干扰能力较差,难以在复杂条件下定位;UMB(超宽频无线短程网)定位抗干扰能力强、速率快,适合用于复杂环境中的定位;视觉定位[18-20]通过比较相邻两帧图像之间相同特征点的对应关系,推算出机器人的实时位置坐标。除视觉定位技术外,上述几种导航技术实际上很少用于巡检机器人导航。巡检机器人常用导航的技术主要有惯性导航、磁传感器、激光雷达等。
4.2 惯性导航定位
基于惯性元器件的自主式导航系统由加速度计和陀螺仪组成,根据巡检机器人加速度和角速度推算出下一时刻的位置和姿态,可以估算出机器人当前位置和姿态[19-22]。
4.3 磁传感器导航
在地面铺设磁轨道或者RFID 标签导航,巡检机器人根据感应电磁信号沿着轨道移动。磁传感器导航技术具有传感器结构紧凑、导航精度高、抗干扰强、灵敏度高等优点[19-20]。
4.4 激光雷达的导航
根据激光雷达获取的当前环境信息和己知地图进行匹配并不断进行自身位置的矫正,是一种常用的绝对姿位的估计方法[19-20,22]。
5 钢铁企业巡检机器人的应用
巡检机器人在钢铁企业应用的场景非常广泛,一些典型应用具体如下。
5.1 皮带机巡检机器人
钢铁企业中很多工序都有皮带运输系统,如原料料场皮带、烧结矿皮带、高炉供料皮带、转炉上料皮带等。轨道式、攀爬式等巡检机器人携带红外测温仪、高清相机、环境传感器、拾音器等,可对皮带机运行状态(包括皮带跑偏、撕裂、温度异常、托辊损坏等)、异常尺寸的矿料、人员违规行为等巡检报警[23]。
八一钢铁公司炼铁厂烧结分厂的皮带巡检机器人(见图7)可以实现烧结矿筛分楼下方6 条皮带区域巡检的全覆盖,可将皮带、托辊、滚筒、电机转动及现场环境的变化等有关实时数据直接传送至监控中心大屏。

图7 轨道式皮带巡检机器人
宝山钢铁公司的原料皮带机通廊四足巡检机器人(见图8)可在狭窄、积料的皮带通廊上进行自主导航、路径规划、自主避障,实现在环境受限制、恶劣程度高的皮带机巡检应用。

图8 攀爬式皮带巡检机器人
5.2 电缆通廊巡检机器人
钢铁企业中有大量的电缆通廊、地下电缆沟,轨道式巡检机器人通过红外摄像头、拾音器、辅助光源等,可对电缆通廊、电缆沟的一氧化碳(CO)、温度、湿度、局部放电、烟雾等进行检测,实现自动测温、热成像扫描等,完成对电缆温度实时监控和诊断[24]。
5.3 高压电气室巡检机器人
该应用场景包括各生产工序高压电气室等。通过轨道式或者AGV 轮式巡检机器人巡视高压柜运行状态、自动测温、热成像检测、放电检测、有毒有害气体检测、烟雾检测、声音识别等,火灾及人的行为状态报警等[25]。
中南钢铁公司(原韶钢)炼铁厂的高炉高压配电室轨道式巡检机器人(见图9)可自动完成红外温度检测、局部放电检测、图像识别、环境温湿度检测等,并对高压配电室的表计、状态、声音、环境、局部放电等35 项关键指标进行不间断实时监测。

图9 轨道式高压电气室巡检机器人
5.4 变电站巡检机器人
该应用场景包括变电站、配电站等。轮式或者无人机巡检机器人可对主变压器、配电室进行巡检,以及读取表计数据,检测环境温度,进行放电检测、声音识别等。
马鞍山钢铁公司配备的电厂配电站轮式巡检机器人(见图10),结合5G 通信技术可实现巡检数据的多样性、实时性。

图10 轮式变电站巡检机器人
5.5 化工产品区域巡检机器人
该应用场景包括焦化粗苯、油库等区域。轮式或者无人机巡检机器人对脱硫塔煤气泄漏检测、富油槽及水放空槽液位和泄漏检测、管式炉及管道泄漏检测、焦油贮槽及粗苯储槽挥发性气体检测、罐体液位检测、油库泵房内气体检测、烟雾及火源检测报警等。
5.6 煤气柜巡检机器人
该应用场景包括高炉煤气柜、焦炉煤气柜、转炉煤气柜、混合煤气柜等区域。煤气柜巡检机器人可以使用轮式机器人及设置机器人专用电梯等实现对气柜区域无死角的巡检。
5.7 能源介质管道巡检机器人
该应用场景包括煤气、蒸气、氧气、压缩空气等能源介质管道。钢铁企业能源介质管道覆盖范围宽广,无人机巡检机器人按设定路线飞行,通过图像比对,数据分析实现快速巡检;轨道式机器人可对管道的温度、位移、区域气体浓度等参数进行检测,并对排水器水位、溢流情况进行监测等。
5.8 炉窑平台巡检机器人
该应用场景包括焦炉炉底地下室、热风炉热风出口位置、高炉炉前风口平台等。轮式巡检机器人对炉体、管道、风口的温度进行监测、实时监控环境煤气浓度进行预警。
新余钢铁公司的焦炉烟道及地下室轨道式巡检机器人(见图11)可替代人工进入高温、有毒爆炸区域进行巡检,解决高温、有毒、爆炸区域内人工巡检设备故障隐患不及时、隐患不易发现的问题。

图11 轨道式焦炉炉底巡检机器人
图12 所示为中南钢铁公司的高炉风口平台轮式巡检机器人(即中国宝武集团“宝罗机器人”)可实现对风口平台直吹管温度、煤气及异音检测,自动巡检分析高炉风口工作状态。

图12 轮式高炉风口平台巡检机器人
5.9 其他设备设施巡检机器人
该应用场景包括煤气布袋除尘、地下水管通廊、水泵房、旋流池、运转风机、轧机设备等。该类巡检机器人可对煤气泄漏、温度异常、阀门开闭状态、设备运转状态等检测报警。
6 钢铁企业中巡检机器人应用特点
6.1 巡检机器人应用优势
6.1.1 适应恶劣环境条件
钢铁企业中存在高温,有毒、有害气体,空间有限等恶劣条件,使得人工巡检作业时风险系数增大,对于这些危险场所的巡检作业若由巡检机器人来完成则可大大降低风险。化工产品区域、煤气区域、管道、通廊、炉台平台等均属于这类情况。
6.1.2 适合替代简单重复作业
皮带机、电缆通廊、高压电气室、变电站、能源介质管道、煤气柜、设备设施等场所存在巡检线路长,巡检对象检测参数相对简单固定等缺点,人工巡检需要耗费大量的人力和物力,而采用机器人巡检可以节约劳动力的投入。
6.1.3 完成高难度巡检
对一些巡检部位位置相对较高或较低,人工巡检需要借助其他辅助手段的地方,而使用巡检机器人不受位置高低的限制。对于空间比较狭小、人员难以进入的场所,巡检机器人均可顺利执行任务。
6.2 巡检机器人功能特点
6.2.1 目的与功能
巡检机器人主要依靠自身传感器对巡检对象进行参数检测、数据采集、图像抓拍、状态识别、监测报警等,起到数据传输、预警等作用,替代人工现场巡视或进行一些生产线上的作业。生产线上作业类型机器人以操作为主,核心功能以完成工序生产任务操作为主,以作业量、作业效率为衡量标准,和巡检机器人在功能和目的性上不同。
巡检机器人可沿按照规划设定的巡检线路巡检,根据巡检方式的不同设计机器人的导航模式,实现机器人按周期巡检的功能。巡检机器人巡检移动范围可以是局部,也可覆盖整个钢铁厂区,其有较大的活动空间。而作业类型机器人以岗位作业为主,以完成特定作业任务而进行功能设计,机器人移动范围相对较小,或者不能移动。
6.2.2 二次应用开发[26]
巡检的目的是发现生产及设备运行情况,分析存在的问题。通过对巡检数据的采集检测,一些简单问题根据预设巡检结果,巡检机器人可直接发出相应的动作。但是被巡检对象和现场环境条件等是不断在变化的,巡检机器人要达到人工巡检的效果,需要通过模型数据的应用开发,才能具备有个性化巡检现场结果模型,以达到接近人工巡检一样的结论。
6.2.3 应对预设条件变化
普通作业机器人在作业过程中往往可受控或者预知,与普通作业机器人相比,巡检机器人可能需要面对各种气候条件,线路上的各种变化,因此要求巡检机器人能够应对预设条件变化的能力。
7 关键环节分析
与人工巡检相比,巡检机器人具有很大优势。上述几种应用机器人巡检的场景若要完全替代人工巡检,需注意以下几个关键环节。
7.1 准确定位
巡检效率与适应现场的多变情况需要依赖高精度定位,当发生情况需要对路线进行规划与调整时,巡检机器人的实时准确定位十分重要。
7.2 避障能力
上述应用场景只有部分可以做到黑灯工厂的模式,实际上巡检过程会出现各种新情况,如新障碍物的产生,巡检机器人要有及时发现和避让障碍物的能力。
7.3 智能巡检
巡检机器人要具有感知环境、资源信息能力变化的应对能力,根据外部的突然变化情况调整巡检方法和内容,达到真正的智能化。
由于外部条件发生变化,巡检机器人采集到的数据会发生偏差,则需要能够及时作出判断,使用备选巡检方案。如由于天气变化或者其他原因引起视觉识别精度降低,无法准确识别读数,则要有其他备选替代解决方案,避免因局部问题导致无法完成巡检任务。
7.4 抗干扰
钢铁企业存在各种的干扰源,尤其电磁干扰最为突出,巡检机器人要对应用场景的干扰源进行预判,采取适宜抗干扰方案,避免干扰的影响。
7.5 维护检修
巡检机器人日常点检维修、维护保养的重要性比被巡检设备更高,只有巡检机器人处于良好运行状态才能达到预计的巡检目标。
7.6 学习开发
巡检机器人巡检技能的提升依赖于机器人的学习过程,通过对检测结果数据分析,形成新的检测结果模型,实现巡检机器人应用功能再开发。
8 展望
目前,巡检机器人在钢铁行业的应用才刚刚起步,进入行业的品牌众多,存在对同岗位同类型的机器人重复探索、反复实验的过程,机器人的单位建设、维护成本高的问题。笔者认为对巡检工作内容一样的岗位,应尽快统一巡检机器人使用类型,这样有利于降低开发使用成本和实现机器人管理、维护的标准化,也有利于机器人大规模的推广应用。
猜你喜欢
军民两用技术与产品(2021年10期)2021-03-16
导航定位与授时(2020年5期)2020-09-23
空间科学学报(2020年6期)2020-07-21
铁道通信信号(2020年9期)2020-02-06
空间科学学报(2020年6期)2020-01-08
环球时报(2019-12-05)2019-12-05
经济技术协作信息(2018年7期)2019-01-14
中国军转民(2018年1期)2018-06-08
知识经济·中国直销(2018年3期)2018-04-12
学习月刊(2015年1期)2015-07-11
