
行业动态(新技术)
2023-10-29 01:58
机器人技术与应用 2023年5期
北航团队提出一种全新磁控机器人设计制造技术
日前,北京航空航天大学陈华伟教授团队提出了一种全新磁控机器人设计制造技术,针对磁控机器人的原位运动编程和位姿感知需求,通过4D喷涂打印制备一种新的碳-磁薄膜多层材料,实现电热磁化和电阻应变传感的功能耦合,达到多模态驱动和位姿感知一体化。相关成果以“A Magnetic-Driven Multi-Motion Robot with Position/Orientation Sensing Capability”为题发表在期刊《Research》上。
其中,用于原位可编程磁驱动的分层结构包括碳基导电层、热熔磁性层和聚氨酯封装层等。热熔材料选用生物分子DL-硫辛酸(DLT),利用热引发的开环聚合处理来形成软聚合物;碳基导电层在通电下可实现快速升温,将热熔材料加热至80℃以上进入熔融态后,内部钕铁硼颗粒在外磁场作用下可重新排布,冷却后即可完成原位重充磁。最后通过4D气动喷涂完成六爪磁控机器人的制造。
为能够进行多模态驱动,六爪磁控机器人的每条臂被分为两段,包含三根银墨水电极,并通过漆包线连接。通过给选定的部分通电,可将其加热至80℃而相邻的部分仍然能保持室温,在外部施加10mT编程磁场后,即可将所选加热区域单独磁化。通过对各区域分别加热、磁化,可使机器人实现各种不同模态的磁编程效果,在外部驱动磁场下表现出不同形变、运动模态。
获取机器人的姿态信息对其驱动和磁编程至关重要。其用于加热的碳基导电层同时还表现出了电阻应变响应特性,当机器人任意一臂受到外磁场作用弯曲时,其电阻在压缩/拉伸时会明显的增大/减小。磁场作用强度与电阻变化正相关,在仅仅5mT磁场作用下的形变即可被感知,且能够达到1Hz的响应频率。
为获取机器人的6个自由度,可以在其外部分别施加X、Y、Z三个方向的横向运动磁场,以及绕机器人X、Y、Z的三个旋转磁场。通过实时记录机器人一支臂的电阻变化,对应当时外部磁场的位置和角度信息,即可获得机器人的位置和姿态。同时,5mT的旋转磁场远小于30 mT的驱动磁场,因而位姿检测也不会造成机器人自身的运动,可以实现位置±3 mm,角度±2.5°的检测精度。
负责人表示,通过原位重编程,机器人的多模式运动提升了对复杂运动和操作需求的适应性。结合位姿感知能力,机器人可以在非可视的胃肠道环境中达到准确重编程和操作效果,这有助于实现复杂的药物递送和释放、组织检测功能。该项研究为开发精确、多功能的胃肠道医疗磁驱机器人提供了新思路。
(来源:《Research》)
中国科大团队发明飞秒激光制造磁响应“双面神折纸”机器人
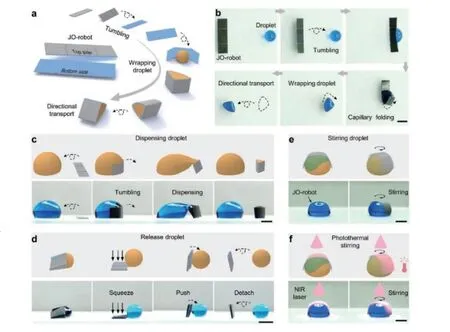
近日,中国科学技术大学工程科学学院微纳米工程实验室胡衍雷教授团队利用飞秒激光微纳制造方法,制备了一种可用于跨尺度液滴操纵的磁响应双面神折纸机器人。该机器人实现了多样化液滴操纵功能的有效集成,包括液滴的三维运输、合并、分裂、子液滴分发与按需释放、搅拌以及远程加热等,可以实现对体积范围在3.2~51.14 μL内液滴的操纵。
磁响应双面神折纸机器人的上下表面分别具有不同的润湿特性。其中,机器人上表面为超疏水低液滴黏附状态,而下表面则为疏水高液滴黏附状态。同时,机器人的上表面还设计了两条折痕,以使其与液滴相接触时,可以在毛细力的作用下自发包裹液滴。机器人整体轮廓、折痕和表面微纳功能结构的加工和改性均由飞秒激光扫描而成。机器人在磁场驱动下通过翻滚主动靠近并包裹水滴,可以实现对水滴的可控运输。此外,该机器人还可以通过定向翻滚与折叠从大液滴中分发出子液滴,通过控制磁场强度可以将分发的子液滴从机器人中挤出。机器人利用其特殊设计的超疏水外表面轻推水滴,可以实现子液滴的可控释放分离,也可以在磁场作用下旋转,实现液体的可控混合,并结合其光热特性实现远程加热。
研究人员表示,该机器人可以实现跨尺度液滴操纵,对精细化工、医疗诊断和微流体技术等广泛需要精确获取和添加试剂、微液滴图案化和快速微液滴反应的领域具有重要意义。
(来源:中国科学技术大学)
猜你喜欢
装备制造技术(2021年1期)2021-05-21
高校化学工程学报(2020年2期)2020-06-10
原子能科学技术(2020年1期)2020-03-30
光学精密工程(2016年5期)2016-11-07
光学精密工程(2016年4期)2016-11-07
电气技术(2016年3期)2016-10-14
湖北工业大学学报(2016年5期)2016-02-27
综合智慧能源(2015年12期)2015-04-24
电测与仪表(2014年20期)2014-04-04
组合机床与自动化加工技术(2014年12期)2014-03-01
