
机构智能让“变形金刚”从屏幕走进现实
2023-10-29 01:58戴建生
机器人技术与应用 2023年5期
戴建生
(南方科技大学机器人研究院,广东深圳,518071)
1 机器人
1.1 机器人的定义
国际机器人联合会(IFR)在对机器人的定义中提出了两个关键词,“reprogrammable”“machines”。其中“reprogrammable”表示可重新编辑,如今我们已能加入计算机技术、控制技术、智能技术;“machines”表示机械,也就是机器人的机构(结构)、设计。在此基础上,笔者提出了第三维要素——数学、运动学、动力学。
1.2 机构(机器人结构)与机器人
人的构成包括骨骼、骨架、肌肉和血液,其中的骨架就类似于机器人的结构(图1),决定了机器人的运动范围。在骨架的基础上加上动力驱动、神经系统传感,能够让机器人具备动力与思维方式。
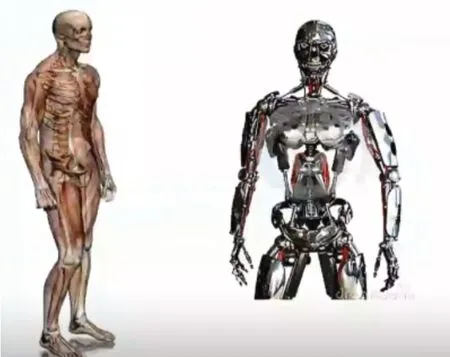
图1 机器人结构
例如,由荷兰艺术家Theo Jansen 打造的“仿生巨兽”Theo Jansen 机制(图2)——利用塑胶、木头等常见材料制造风力动物模型。这一“海滩动物”借由机械原理和自然风力移动前行,不仅可以做出行走等仿生物的动作,甚至可以自行躲避障碍物,在海滩上自由行走。

图2 Theo Jansen 机制
在科幻电影《变形金刚》中,机器人能够自由地改变形态,而变胞机器人的出现可谓是变形金刚从屏幕爬进了现实。艺术家往往是最富创造力的,例如达芬奇大约在1495 年设计的仿人型机械,到今天仍然在使用。
1.3 机器人的发展阶段
Robotica 四十周年创刊专辑的编者按中将机器人的发展分为了两个25 年:传统机器人的25 年(1985-2010)和现代机器人的25 年(2010-2035)。前者是工业机器人的高速发展时期,例如汽车装配线机器人,而服务机器人、医疗机器人才处于起步阶段;后者是服务机器人、医疗机器人的高速发展阶段,包括Chat GPT 大语言模型的出现,机器人越来越具有人形、人的思维方式,机器人技术的发展不断赋能智能制造。往后的13 年(2023-2035)对于机器人的发展至关重要,且智能制造的进一步发展需要“机器人革命”、机器人机构创新。
2 智能机器人
2.1 智能机器人的定义
对于智能机器人的定义,美国机器人协会(RIA)认为是一种可编程和多功能的操作机,或是为了执行不同的任务而具有可用电脑改变和可编程动作的专门系统。日本机器人协会(JRIA)认为机器人可分为工业机器人、智能机器人,智能机器人能够模仿人脑,完成一些人脑的智力工作。国际标准化组织(ISO)将其定义为具有一定程度的自主能力,可在其环境内运动,以执行预期任务的可编程执行机构。经过长期的研究,大多数专家认为智能机器人至少要具备三个要素,感觉、运动、思考。
2.2 机器人的三次发展浪潮
第一代机器人是可编程示教再现型机器人,是一种可重复再现通过示教编程存储起来的作业程序的机器人;第二代机器人是知觉判断机器人,具备了对外界信息的反馈能力,有了包括力觉、触觉、视觉等在内的感觉;而智能机器人则是机器人技术发展到第三代的产物。
智能机器人主要可以分为三大类,传感型、交互型、自主型。传感型机器人又称外部受控机器人,其本体上没有智能单元,只有执行机构和感应机构,利用传感信息进行信息处理。交互型机器人能够进行人机对话,实现人对机器人的控制和操作。自主型是一种无需人为干预的机器人,能够自动完成各项拟人任务,其本体具有感知、处理等模块,能够独立地活动和处理问题。
2.3 新一代智能机器人的算法智能和机构智能
新一代智能机器人应该具备算法智能和机构智能,在算法智能方面,通过人工智能技术,让机器人具有自主性以及智能处理信息的能力;在机构智能方面,机器人要可重构,实现机械智能,达到一机多能。
如图3 所示,目前的智能机器人包含七大关键技术:重构技术、多传感信息融合、导航与定位、路径规划、机器人视觉、智能控制、人机接口技术。

图3 智能机器人关键技术
智能制造机器人现存的最大问题是不确定性问题,在使用过程中面临着适应动态随机变化的环境、剔除传送器噪声、机械工作执行不够准确以及能力受限、现有模型简单且不准确等挑战,实现机构智能是应对多变环境的重要解决方法。
3 机构智能的理论与发展
智能机器人要想适应当前环境就需要根据不同的环境、需求进行变形,为此,笔者提出了“变胞机理”的概念,作为机器人机构创新的新途径。
3.1 可重构技术
回顾人类的进化过程,100 多万年来与自然环境的交互、重构改造;机器的变革由单一简单任务到复杂工况,经历了四次工业革命,在此启发下,笔者在1998 年提出了一个新的概念——“metamorphic mechanisms”,metamorphic 是指从生物学原理出发,改变形态、重新构造。2000 年,笔者与张启先院士一同将“metamorphic mechanisms”译为“变胞机构”,这种变胞机构与传统结构一样是变活动度、变拓扑,而不同之处在于,过去并联机构在3UPS 活动路径确定后,再从3UPS 到3SUP,活动度需要全部重新设计,但变胞机构能够帮助3UPS 和3SUP 进行快速转变,实现产品智能。此外,笔者出版的《旋量代数与李群、李代数》一书,从瞬时旋量、有限位移旋量、李群、李代数四方面,构成了新的机器人结构理论学。
国际上对可重构技术的研究,从1998 年到2011 年,连续召开了五次国际可重构机构和可重构机器人大会,即ReMAR 大会。
3.2 变胞机构前沿热点研究全球分布
“变胞机构”自1998年被提出后,国内外展开了广泛的研究,包括欧洲对可重构机构的研究、美国对仿生折纸的研究、中国对变胞机理的研究等。
其中,一类由几何体切割链接而成的新型变胞机构,为几何体开发开辟出了一种设计新思路、新方法。如图4所示,将一个立方体进行切割展开,形成一个新的结构,新结构的中间为环状,从里到外,从外到里可以不断旋转。同样,笔者与哈尔滨工业大学(深圳)李兵教授也对几何体进行了研究(图5),几何体可以切块分散再重新组装变成一种新的机器人结构。

图4 几何体开发设计新思路

图5 几何体研究
4 机构智能的研究现状
4.1 机构智能的变胞灵巧手
在机构智能的研究中,基于机构智能的变胞灵巧手(图6)是学者关注的重点。灵巧手的关键在于手掌不是一块一成不变的铁板,而是一个变胞机构,其自由度可以从0到1 再到2,可以收缩、重新展开。

图6 欧盟项目中的变胞灵巧手
4.2 机构智能的变胞足式机器人
另一项重要研究是基于机构智能的变胞足式机器人(图7),足式机器人是在1997 年提出的折纸衍生机构的基础上产生的。变胞行走机器人(图8)可以转变成各种形状,还能够进行翻转。笔者与其他学者共同提出的足式机器人Origaker(图9),是一个基于变胞机理的多拟态四足机器人,它可以自己打包,再重新展开,甚至从直升机上掉落后能重新爬起来。
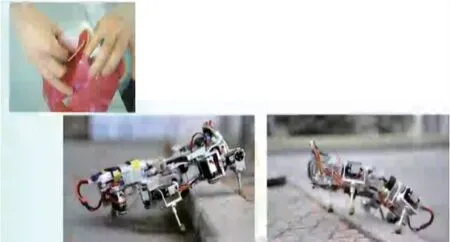
图7 变胞足式机器人

图8 变胞行走机器人

图9 足式机器人Origaker
5 机构智能的各种应用
5.1 人机融合,基于机构智能的可重构传感与人机交互
机构智能在可重构传感、人机交互方面的应用包括多场耦合驱动分析与优化、高精度驱动设计与加工、基于柔性驱动及变胞机构的机器人应用。
目前人机交互场景下检测交互信息的方式包括关节力检测与估计、柔顺驱动关节、视觉与激光雷达、触觉皮肤等。这些方式可分为接触感知与非接触感知两类。接触感知方法无法从根本上避免碰撞,给工作人员造成心理上的压力,相比之下非接触感知交互安全性更高,但视觉感知存在视野盲区问题,二维阵列式接近感知所需传感器数量庞大,成本高、实时性和可靠性不高。
5.2 刚柔融合,基于机构智能的连续体机器人与抓捕机构
5.2.1 基于机构智能的双向柔顺驱动机构用于爬行机器人
利用双稳态机构实现机器逻辑(状态A 触发状态B,状态B 触发状态A,反复循环),并将该驱动机构应用于爬行机器人(图10),则无需电控元件。机构智能有效地降低了驱动层控制复杂度,提高了系统响应速度和可靠性。
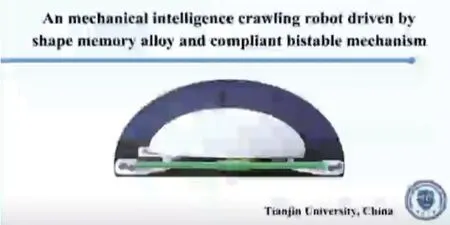
图10 爬行机器人的双稳态机构
5.2.2 仿海葵多触须变构型机构抓捕动态目标
海葵(图11)是一种海洋软体动物,身体呈圆柱状,一端是基盘,附着在海底岩石或其他物体上,另一端是口盘,周围有几圈触手,因外形似葵花得名。

图11 海葵
仿海葵多触须变构型机构能够实现多触须全向捕获,简化位姿调整,柔性机构能够帮助减小碰撞冲击造成的损害,变构型机构可以适应不同尺寸、形状的目标,为太空、水下等未知环境下的碎片清理提供了新的可行方案。
5.2.3 模块化可重构灵巧手应用于新一代宇航服测试
通过模块化可重构设计,将“五指”和“手腕”分别放入宇航服手套狭小且不规则的内部空间,在内部组装为完整灵巧手,测量手套屈曲角度、阻力等指标,完成对宇航服的测试。笔者团队、康荣杰教授团队与中国航天员科研训练中心展开合作,在国际上首次实现了五指灵巧手穿戴宇航服手套。
5.3 基于机构智能的软关节机器人交互
5.3.1 建筑机器人
传统的刚性机器人虽然可以提供较大输出力,容易设计具有高带宽、高性能的力驱动器,但其顺应性差,在人机交互时安全性不高。随着机器人应用场景的多元化,机器人的设计向着人机友好方向发展,软关节机器人成为科学家为使机器人更像人而努力的方向。图12 所示为一款软关节的建筑机器人,当人接触到机器人时(图13),机器人可以改变关节的刚度,实现人机共同操作,确保人的安全。

图12 软关节机器人
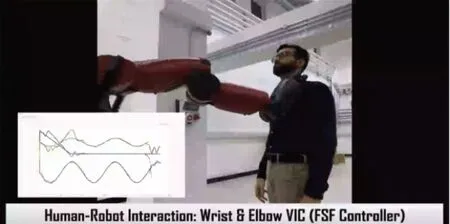
图13 软关节机器人与人交互
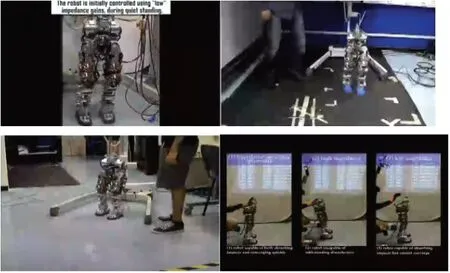
图14 机器人倾覆恢复
5.3.2 机器人倾覆后恢复
机器人倾覆后恢复对于双足机器人的发展同样重要,双足形态天然的不稳定特性使其难以保持平衡,通过机构智能可以帮助机器人在被推倒后“反抗”而恢复。
算法智能与机构智能都是双足机器人实现人机共融不可或缺的成分,只有软(算法智能)硬(机构智能)兼施,改进算法、调整机构才能达到理想的人机交互。
5.3.3 下肢康复机器人
下肢康复机器人是将机构智能运用于人体康复的成功案例,这款机器人主要用于辅助由于中风、脑损伤等神经中枢受损造成的偏瘫、瘫痪等行走功能障碍患者急性期过后的运动康复训练。下肢康复机器人穿戴在康复者身上,输出一定的运动,与人体运动配合,为患者提供助力,实现其生理机能的康复。为实现病人在不同阶段进行多种形式康复运动的需求,康复机器人机构应该能够根据患者康复需求变换机构,实现不同的运动输出,达到更好的康复效果。
并联机构是由两个和两个以上的驱动器通过杆系同时作用于运动平台的空间运动机构,让所有的分支机构同时接受驱动器的输入并最终共同输出。作为一种多路闭环机构,并联机构具有刚度大、承载能力强、误差小、精度高、自重符合比小、动力性能好、控制容易等一系列优点,因此将其与变胞机构结合,设计一种可应用于人体下肢康复的新型机构是非常有必要的。笔者及其团队在2004 年将设计的康复机器人(图15)应用于康复产品,通过对髋关节(图16)、膝关节(图17)、脚踝关节(图18)的不同数据显示,满足不同阶段运动输出的需求。
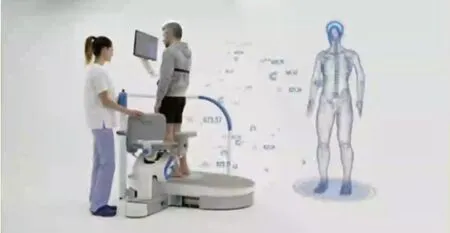
图15 康复机器人

图16 康复机器人(髋关节)

图17 康复机器人(膝关节)

图18 康复机器人(脚踝关节)
5.3.4 按摩机器人
亚健康现象的普遍化以及人们对生活质量的追求都催生了按摩机器人(图19),智能生成的按摩轨迹配合机械臂柔性力控,根据不同使用者,机构智能实现角度、力度的调整。
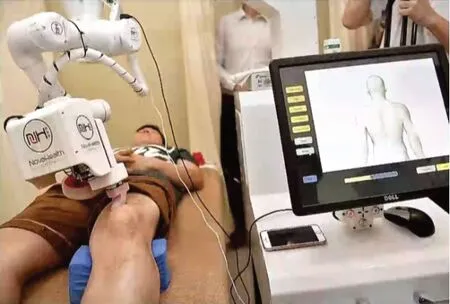
图19 按摩机器人
6 可重构制造与智能制造
深圳市大寰机器人科技有限公司成功将机构智能用于可重构制造,实现自动生产线的智能抓持。该公司产品大寰伺服电动夹爪能够完成冰淇淋制作、无序抓取和定位摆放、细小工件搬运及定位(图20),以及试剂卡定位抓取与测试、指示灯拧紧组装、灯泡末端锁紧等工作。目前,大寰机器人通过可重构技术能够实现精准力控,夹持力最小为0.8N,可以用于豆腐的抓持。
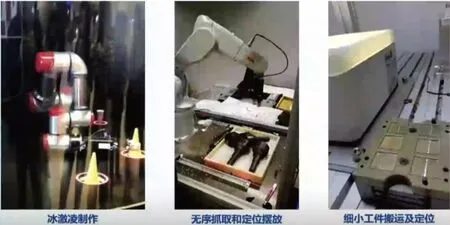
图20 大寰伺服电动夹爪应用
在产量与品种的关系中,一般情况下,品种的变化量越大,产量越低,品种的变化量越小,产量越高,但可重构技术能实现品种变化量和产量的同时提升。
7 智能机器人的发展前景
7.1 发展环境
第一,国家政策的引导与扶持。国家大力推进智能制造,服务机器人、特种机器人产业发展,设立专项牵引基础前沿技术,重点培育龙头企业,带动产业整体质量提升。第二,人口老龄化促进智能机器人发展。到2035 年,中国老龄化人口占总人口的比例将超过1:4,成为超级老年国家,人口结构变化带来的劳动力短缺为服务型智能机器人行业创造了广阔的市场。第三,各地的优势产业升级。明确机器人重点产业发展方向及规模,培育机器人产业集群,同时在珠三角地区出台对智能机器人制造企业的优惠扶持政策。第四,人工智能等核心技术取得一定突破。人工智能、物联网、大数据等技术快速发展,将迎来新一轮融合创新发展浪潮,同时在核心零部件上实现技术突破。
7.2 发展领域
机器人应用场景的多元化表明,智能机器人将不断拓宽其未来的发展领域。智能机器人未来将在装备制造业机器人协同装配,探月机器人等空间机器人,用于海洋辅助、打捞、水下探测等的海洋机器人,应用于恶劣环境下科技考察的科研机器人等领域发展。
7.3 发展趋势
笔者认为智能机器人发展有三大趋势:软硬融合、虚实融合、人机融合。相比硬件设备,机器人软件更为重要,智能感知、智能控制、机构智能都将帮助机器人实现更为智能的操作。其次,必须重视以软件形态为主的机器人,特别是知识机器人和虚实互动的平行机器人技术的发展。智能机器人在未来的应用,必定是基于人、机器、机器人三者的有机融合。
猜你喜欢
摄影世界(2022年1期)2022-01-21
军民两用技术与产品(2021年10期)2021-03-16
作文成功之路·小学版(2020年11期)2020-01-02
知识经济·中国直销(2018年12期)2018-12-29
商周刊(2017年6期)2017-08-22
山东大学法律评论(2016年0期)2016-08-16
小学生·多元智能大王(2016年7期)2016-05-14
Coco薇(2015年11期)2015-11-09
少儿科学周刊·少年版(2015年4期)2015-07-07
少儿科学周刊·少年版(2015年4期)2015-07-07
