
智能消防、巡检机器人的开发及应用
2023-10-29 01:58周洁孙潞潞董炤琛黄永峰刘长安
机器人技术与应用 2023年5期
周洁 孙潞潞 董炤琛 黄永峰 刘长安
(1 中信重工机械股份有限公司,河南洛阳,471039;2 洛阳矿山机械工程设计研究院有限责任公司,河南洛阳,471039;3 河南省科学技术交流中心,郑州,450008)
0 引言
随着社会发展和工业需求的提高,变电站系统也在不断升级,其设备构造趋于复杂,分布范围也更广泛。变电站是输配电过程中的核心环节,一旦发生事故必将严重影响国家供电系统。变电站火灾事故所造成的损失数额巨大,且严重影响事故现场及周边人身财产安全,同时现场救援实施难度高,极具危险性,消防人员一旦接近将面临安全威胁。为了避免变电站事故发生给国家经济造成损失,给人民生活带来麻烦,必须确保变电站中设备的正常运行,因而日常巡检至关重要。但是,人工巡检的工作强度较大且效率低,发现火灾不能及时处理,变电站的强辐射环境也会使得工作人员暴露在危险环境,人工巡检远远不能满足变电站及时巡检与消防灭火的要求[1-4]。鉴于此,变电站发生火灾初期的预警和处置对于避免或减少变电站事故,具有着重要意义。
随着以数字化为基础的人工智能等技术的发展,智能时代已经到来[5]。变电站实现智能巡检与灭火处置的需求与日俱增,变电站的升级改造也在向无人值守和智能化方向发展。随着机器人技术的发展,智能消防机器人已经能自主完成日常巡察工作和消防灭火任务。
本文主要是通过对无人化巡检及消防灭火的研究,提升在复杂环境下利用机器人对工业场景下的场站内设备进行消防保障的能力,主要完成在场站内机器人自主巡检、记录设备实时温度变化、检测异常火警、联动消防系统发出预警等任务,实现第一时间处置早期火源,为消防队员争取宝贵的时间,并解决在“人不能近、人不能及、人不能为”的复杂环境条件下的作业安全问题。
1 智能消防、巡检机器人基本结构
智能消防、巡检机器人由车体、底盘、巡检系统、灭火喷射系统、电池系统、机器外壳等组成。该机器人外形尺寸≤2050 mm × 1320 mm ×1460 mm(长×宽×高),整备重量≤ 1100kg,采用6 轮独立驱动,4 轮独立转向的行走机构,最大行驶速度3m/s,最大爬坡角度25°,耐受环境温度为-20~60℃,涉水深度100mm,防护等级IP54,采用3D 激光导航+GNSS/INS 组合的导航方式。图1 为智能消防、巡检机器人整体结构示意图。
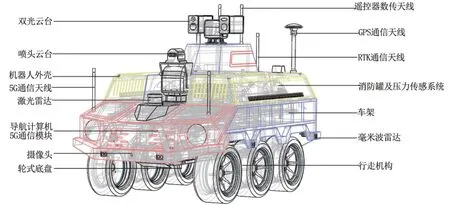
图1 智能消防、巡检机器人整体结构
1.1 机器人车体
智能消防、巡检机器人车体是整个机器人的承载结构,其包括车架、行走机构、车首夹持器等,所有的系统元件均安装在车体上。车体具有保护各设备、防雨、防静电、抗颠振等功能,同时也是实现机器人机动性的组件。
智能消防、巡检机器人车体采用承载式设计,以车架作为基础结构,车架两侧上方固定有左右电气盒,两侧下方固定行走机构。车架前方安装有前面板、车首夹持器、保险杠等附件,车架后方安装有后舱门、后面板等附件,车架前后固定有锚孔。行走机构主要由轮毂电机及驱动系统、带电动转向的双A 臂悬挂机构、转向(电动缸)驱动器、双A 臂中间轮悬挂机构、碟刹及刹车控制机构等组成。机器人车体车架的结构布局如图2 所示。
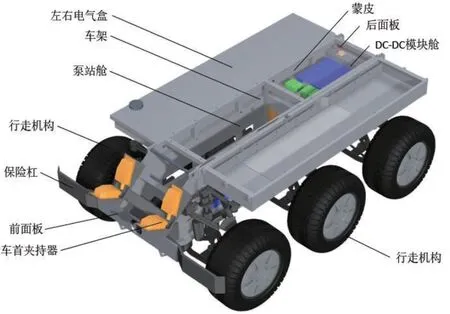
图2 机器人车体车架结构布局
1.2 六轮轮式底盘
通常,机器人行走载体主要包括轮式、履带式、腿式3 类[6]。本文设计的机器人应用于平地,需要较高的驾驶平顺性,而轮式移动平台具有技术成熟、结构简单、运动速度快等优点,因此本文采用轮式移动平台作为智能消防、巡检机器人的移动载体。
本文机器人底盘结构设计包括悬挂机构和转向机构两部分。其中,悬挂机构是由上下A 字臂构成的双摇臂独立悬挂机构,主要包括上A 臂、转向节上球头、转向节羊角座、减震器、下A 臂以及转向节下球头等主要部件;转向机构主要由转向电动缸、转向上摇杆、转向传动轴及轴座、转向下摇杆、转向拉杆、转向节羊角座、转向节球头等主要部件构成。由转向电动缸带动一系列传动拉臂、传动轴以及拉杆运动,最终拉动转向节羊角座旋转,从而带动轮胎转向。该结构设计可将转向机构布置在车体两侧,同时又可躲避悬挂机构的干涉,可充分利用车体侧面的空间。本文机器人底盘结构如图3 所示。
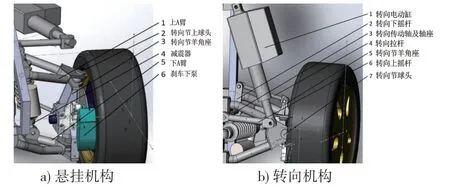
图3 机器人底盘结构
1.3 巡检系统
本文机器人巡检系统主要包括主控制器、双光云台、天线、激光雷达等。其中,主控制器由嵌入式计算机、采集卡、视频选择器、数据链模块、切换开关、航插、调试网口、指示灯组成,其主要负责上位机信号的接收、解析,运动控制计算、向驱动器发送指令;对主要部件状态的采集、信息打包向上位机发送等;还可以控制信号灯。双光云台具备环境成像、热源识别功能,水平转动范围为-180~+180。,垂直转动范围-30~+90。,测温灵敏度可达60mK,测温范围0~+550℃。天线包括5G 通信天线、遥控器数传天线、GPS 通信天线、RTP 通信天线,各类天线共同工作,接收不同信号并上传至主控制器,由主控制器进行信号处理。激光雷达主要是探测机器人前后方的行人、车辆等障碍物,以及前方障碍物与机器人车体之间的位置关系,完成机器人安全状态的评估,同时也为后台系统规划和决策提供可靠稳定的输入。另外,机器人前方的激光雷达需安装在车头上,并保证在机器人中线位置处。
1.4 灭火系统
依据车架承载力、打击作业距离和实际效果的需求,智能消防、巡检机器人搭载的灭火剂容量需要足够大,喷射动力需要足够强劲,因而选择容量为100L 水基灭火器及压力传感系统。水箱采用电动伺服执行机构,一旦巡检系统识别到火源信息,信号传递至压力传感系统,即可实现自动灭火功能。灭火炮头水平旋转范围为-60~+60。,灭火炮头俯仰旋转范围为0~90。,可实现针对性地均匀灭火。灭火器额定喷射流量80L/min,最大喷射距离超过15m。灭火器安装在云台上,云台基底进行了固定保护措施,可避免喷射后坐力对机身外壳造成磨损,导致喷射精度降低。
1.5 电池系统
智能消防、巡检机器人电源系统包括电池、DC-DC 模块、电源开关、充电航插、电池航插、分线器。其中,电池采用电压为44.8V 的磷酸铁锂电池,可最大限度地保护环境。该机器人采用充电桩自动充电的方式,充电时间少于3h,续航时间可超过5h。机器人电源电路组成如图4所示。
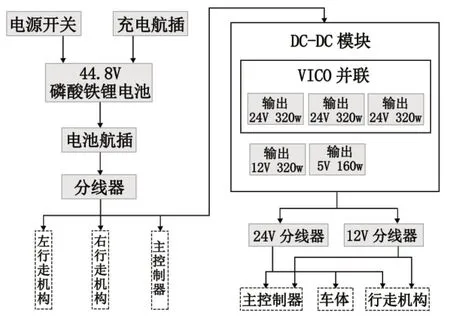
图4 机器人电源电路组成
1.6 机器外壳
在保证相关功能的前提下,笔者团队充分考虑了产品外观的适用性,选择白色作为本文所设计的机器人的车身颜色,其简约大气,搭配红黑线条,形成坚毅稳重的视觉效果。此外因其室外工作的特性,白色车身可使吸热速度降低,可有效降低车体内的温度。该机器人采用模块化设计,车头、车身两侧、车尾均具备拆卸功能,便于装配、检修,降低了制造难度。智能消防、巡检机器人外观设计如图5 所示。

图5 机器人外观设计
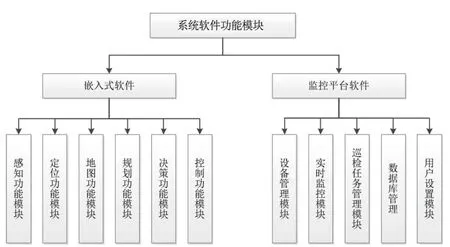
图6 系统软件功能模块
2 智能消防、巡检机器人系统软件
智能消防、巡检机器人系统软件功能模块包含嵌入式软件和监控平台软件两部分。其中,嵌入式软件主要用来实时分析机器人前端传感器收集到的数据信息,分为感知、定位、地图、规划、决策和控制6 大模块。根据摄像头识别的周围环境,该机器人可进行路径规划、行进速度控制、自动转向、自动避障、自主充电等,进行设备运行的日常检查;具备对仪表内容的自动识别提取,以及对初期火源或异常热源进行热源预警等功能。监控平台软件可以显示前端传感器采集的信息,主要集成机器人状态信息(场景、地理位置、行进速度、剩余电量、故障报警等)和现场信息(现场视频、重点装巡查装备的状态信息、火灾报警、现场温湿度及气体异常报警等)。
3 智能消防、巡检机器人功能特点
智能消防、巡检机器人具备高精度组合导航、热源识别、读表、人脸识别等多项功能。
其中,高精度组合导航功能:机器人本体具备自主定位、导航、路径规划及避障功能,支持自主充电功能;
热源识别功能:主要对设备热源信号进行采集、比对分析、报警和记录,具备异常热源及早期火源定位功能,获取异常热源及早期火源空间位置信息;
读表功能:具备对场站内所有表计的读表和分析功能;
人脸识别功能:机器人在自主巡检过程中,发现场站内出现的异常人员,在后台报警,并保存异常人员的照片信息;
初期火情处置功能:机器人自身搭载灭火罐,具备灭火罐的启动功能和喷头对灭火点的锁定,实现对初期火源的控制;
远程报警功能:当现场出现热源异常时,机器人应向后台监控中心发布预警信息,通过后台界面显示和警铃的方式告知值班人员,同时,将消防栓坐标、最佳灭火点坐标、热源异常点坐标发送至消防灭火机器人,具备在人工确认下启动消防灭火机器人自主灭火流程的条件;
运行状态自分析功能:对本体基础运行状态如电源容量、电压、电流、无线信号、运行速度等进行记录,在异常情况下及时停机或返航、报警;在连续运行规定时间内可提醒零部件的更换,如轮胎更换、电池更换等;
平台监控功能:后台监控平台实时显示视频信息、地图与位置信息、系统本身常用信息(如电量、信号强度、时间等基础信息);
平台识别与报警功能:后台监控平台显示读表、热源数据、人脸识别、数据分析、数据异常报警(含界面显示报警和硬件警铃报警)等信息。
4 现场应用
该智能消防、巡检机器人已成功应用于多个变电站,在现场可顺利识别热源,并将温度异常点的温度变化曲线图、现场位置信息、云台采集到的视频文件上传到后台监控并发出平台预警信息。后台监控人员接收到信息进行判断并处置,首先确认着火区位置,并进行设备断电,同时下达指令给机器人,由机器人进行先行灭火处理,后台在传达灭火信息的同时也会将火情信息传递给相关负责人进行后续处置。智能消防、巡检机器人可以进行初期精准打击火源、降温冷却,抑制火势蔓延,有效利用救火黄金3分钟,为后续消防争取时间。
猜你喜欢
物流技术与应用(2022年5期)2022-06-17
装备制造技术(2021年4期)2021-08-05
煤气与热力(2021年3期)2021-06-09
中国自行车(2018年4期)2018-05-26
电子制作(2017年19期)2017-02-02
电力系统及其自动化学报(2016年5期)2016-12-01
焊接(2015年1期)2015-07-18
焊接(2015年1期)2015-07-18
焊接(2015年8期)2015-07-18
中国工程咨询(2015年2期)2015-02-14
