无人艇全分布式动态事件触发编队控制
2023-10-04 09:25:40肖云飞于秀萍
控制理论与应用 2023年8期
黄 兵,肖云飞,冯 元,于秀萍
(1.哈尔滨工程大学水下机器人技术国防科技重点实验室,黑龙江哈尔滨 150001;2.哈尔滨工程大学智能科学与工程学院,黑龙江哈尔滨 150001)
1 引言
近年来,随着陆地资源的日益匮乏,海洋资源的开发和利用逐渐进入人们的视野,多艘无人艇(unmanned surface vehicles,USV)协同作业作为未来海上装备发展的重要方向,受到越来越多国家的高度关注,成为各国争相研制的“热点兵器”[1].在复杂的海洋环境下,多USV协同作业在石油和天然气探测、环境监测和远洋在航补给等海上任务中,具有广泛的应用前景和潜在的应用优势[2].控制器设计作为集群系统的核心技术,保证了上述水面任务的成功率.然而,艇体的高度自动化和海洋环境的复杂性给协同控制器设计带来了严峻的挑战.在此背景下,国内外学者提出了多种USV编队控制研究方法,包括领航者-跟随者策略[3]、基于行为方法[4]、虚拟结构法[5-6].其中,虚拟结构法具有控制精度高、稳定性好的优势,使之成为当下USV协同跟踪方向的研究热点.
在虚拟结构法中,所有编队成员被视为一个整体,通过共享的通信网络进行信息交换.传统的通信方案以周期的方式对数据进行采样、处理和执行,即所谓的时间触发控制[7].从资源利用的角度看,这种控制方案在实际应用中可能会造成不必要的通信资源浪费.为了解决这一问题,一种非周期性控制策略,即事件触发控制引起了国内外学者的关注.所谓事件触发控制,是指只有当实际测量误差范数大于一个允许界限阈值或系统状态范数时才更新控制协议.因此,基于事件触发的控制方法(包括静态和动态),在减少通信频率和节约能源方面具有很大的优势.特别地,无论是静态还是动态事件触发都要避免出现Zeno现象,即控制行为在有限的时间内被无限次触发.这种现象会使相应的控制行为无法执行,甚至导致系统不稳定.鉴于此,在设计触发机制时应排除Zeno行为.
文献[8-10]深入研究静态事件触发通信方案,在保证一致性协同控制的同时降低通信频率.其中文献[9]设计了一种多水面无人分布式事件触发轨迹跟踪控制器,利用状态误差条件控制领导者与跟随者之间的通信.作为该方案的技术扩展,文献[10]引入了固定时间控制方法,使得设计的分布式事件触发编队控制器能够在预设的时间内收敛.虽然上述静态事件触发通信方案降低了通信负担,但是信息更新的次数和事件触发间隔仍有提升空间.与静态事件触发相比,包含内部动态变量的动态事件触发控制策略不仅能够增加两个执行时刻的间隔时间,而且可保证最小时间间隔至少为一个采样周期.基于多智能体系统,文献[11-12]分别提出了涉及内部动态变量的分布式和全分布式动态事件触发控制策略,以降低每个智能体向其邻居传输信息的频率;不同于分布式控制策略,文献[13]首次提出集中式动态事件触发机制来解决领导者-跟随者的一致性问题.结果表明,动态事件触发机制能够增加任意两个连续触发时刻之间的最小时间间隔.然而,由于USV动力学模型的高度非线性和海洋环境的复杂性,上述方法无法直接应用于多无人艇协同系统.
鉴于以上分析,本文致力于解决基于动态事件触发机制的USV编队控制问题.主要贡献如下: 首先,针对通信资源受限问题,提出一种动态事件触发通信方案以降低USV之间的数据传输频率;然后,在事件触发机制的基础上将滑模控制策略与自适应算法相结合,设计了一种可实现USV协同轨迹跟踪的全分布式编队控制器.本文设计的算法不需要每个跟随者获取领导者的相对速度信息和通信网络的全局信息.
2 问题描述
2.1 USV动态模型
本文研究多USV协同轨迹跟踪控制问题.首先给出地面坐标系OXEYE和船体坐标系OXBYB以描述USV的二维运动.在地面坐标系中,O表示坐标原点,OXE为正东方向,OYE为正北方向.在船体坐标系中,O表示USV的质心,OXB沿USV中线指向船艏,OYB指向USV的左舷.USV模型的运动学方程和动力学方程为[14]
其中:ηi=[xi yi ψi]T指USV在地面坐标系下的位置向量,由位置(xi,yi)和艏摇角ψi组成;vi=[ui vi ri]T指USV在船体坐标系下的速度向量,由前进速度,横漂速度(ui,vi)和艏摇角速度ri组成;R(ψi)表示从船体坐标系到地面坐标系的旋转矩阵,其形式为
此外,在式(1)中:di=[dui dvi dri]T表示外部扰动(风、浪、流等)作用在USV上的力或力矩;τi=[τui τvi τri]T表示USV执行机构输出的控制信号;gi=[gui gvi gri]T表示USV的未建模动力学;惯性矩阵Mi∈R3×3,科里奥利矩阵Ci(vi)∈R3×3和水动力阻尼矩阵Di(vi)∈R3×3的具体表达式见文献[14].
为了使所有编队成员在保持预设队形的同时能够跟踪期望轨迹ηd(t)∈R3,本文引入队形变量∆i∈R3以推导出跟踪误差e1i和e2i,即
其中:e1i为位置跟踪误差;e2i为速度跟踪误差.
控制目标:在考虑外界干扰的情况下,为跟随者USV设计控制器τi,使得: 1)编队成员能够跟踪期望的轨迹;2)编队成员能够保持预设的队形.因此,本文的控制目标可概括为其中Ξ1,Ξ2为正常数.
2.2 图论
本文采用无向连通图描述编队成员的通信拓扑网络.该连通图用符号G=(N,E,A)表示,其中:N={n1,n2,···,nn}为节点集;E ⊆N×N为边集.在无向图中,对于任意的节点i和节点j,有(i,j)=(j,i);A=[aij]∈Rn×n为邻接矩阵.其中aij为邻接矩阵第i行、第j列的元素.如果(ni,nj)∈E,则aij>0;否则,aij=0.值得注意的是,每一个节点不与自身进行信息交换,即aij=0,(=j).对于无向图,A是对称矩阵,即aij=aji.图G的拉普拉斯矩阵定义为L=D-A,其中:···,n,对于Leader-follower编队,fi=1表示无人艇可以接受Leader的状态信息.=L+F是正定矩阵,其中F=diag{f1,···,fn}.
2.3 引理与假设
引理1参考文献[15],如果无向图Gu是连通的,那么它的拉普拉斯矩阵L是半正定的.
假设1假设虚拟领导者的参考轨迹ηd(t)二阶可导,并且ηd,,都是有界的.
假设2外界环境扰动di是有界的,满足‖Midi‖≤Di,其中Di是未知的正常数.
假设3假设存在正常数和,使得Mi满足≤‖Mi‖≤.
假设4本文采用无向连通图描述USV编队成员之间的通信拓扑网络.
3 全分布式事件触发编队控制器设计
本节提出了一种基于滑模控制和自适应策略的全分布式动态事件触发编队控制方案以实现控制目标.首先,设计动态事件触发机制,降低USV之间的通信频率.然后,通过Lyapunov稳定性分析证明跟踪误差的收敛性.最后,证明闭环系统在所提出控制器的作用下不存在Zeno行为.为了更直观地展示控制算法,图1给出了动态事件触发通信框架下的闭环系统框图.
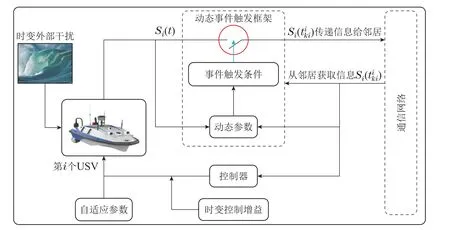
图1 动态事件触发框架下的USV编队控制系统框图Fig.1 Dynamic event-triggered communication framework for formation control of USV
3.1 控制器推导
为了便于控制器的设计和闭环系统的稳定性分析,根据性质RTR=I,将编队成员的数学模型进一步描述为
基于本文定义的协同跟踪误差(3),可设计辅助变量qri和Si,即
式中:k1∈R3×3为正定矩阵,fi为比例参数.如果跟随者可以接收到虚拟领导者的状态信息,则fi=1;否则,fi=0.
对式(6)中的Si求导,并将式(3)-(5)代入,可得
其中Yi(vi)满足‖Yi(vi)‖≤Yi,i=1,2,···,n,Yi是未建模动态Yi(vi)的未知上界,且Yi>0.复杂海况下,模型信息Ci(vi),Di(vi)和gi难以精确获悉,导致设计者无法对Yi(vi)进行描述.因此,本文采用自适应算法对未知上界参数Yi进行在线估计和补偿以抵消未建模动态对系统的影响.
控制律以及自适应律设计如下:
3.2 动态事件触发函数设计
事件触发误差函数定义为
本文采用基于误差信息的动态事件触发机制(12)以减少USV之间信息传输次数,从而降低控制器的更新频率.通过引入一个动态变量ξi,设计触发条件为
式中:αi,βi均为正常数,动态变量ξi满足以下等式:
其中ρi+1>0.根据比较引理,可得
由式(17)可知,动态事件触发方案的触发条件(14)更严格.因为动态变量ξi(t)>0,所以,在保证系统控制性能前提下,动态事件触发策略产生触发时间间隔会更长.
注2参考文献[16],在本文设计的事件触发控制框架下,每个USV只需要与它的邻居间歇通信.事实上,当时,第i个USV达到触发条件.此时,第i个USV的状态信息被允许传输给他的邻居并且基于状态的测量误差γi(t)将立即重置为零.换而言之,当t∈时,第i个USV不向其邻居发送自身信息状态,此时不更新控制协议.此外,每个USV的测量误差只取决于其自身的采样状态和实际状态.因此,所有编队无人艇的事件触发序列都是异步的,更有效的利用了通信网络带宽.
注3本文所提出的动态事件触发机制(14)包含一个动态变量ξi(t).由于该动态变量总是非负的,因此在选择相同参数前提下,动态事件触发机制的测量误差‖γi(t)‖会更晚达到预设阈值,这意味着动态事件触发方案具有更大的触发时间间隔.更重要的是,基于式(16)-(17),包含动态变量ξi(t)的动态事件触发方案在排除Zeno行为方面起着重要作用.
3.3 稳定性分析
定理1对于由多USV组成的编队系统(1),在假设1-4成立的条件下,则本文设计的控制律(9)-(11)和事件触发机制(12)-(13)能够完成对USV编队期望轨迹的跟踪和预设队形的保持.同时,辅助变量Si、自适应估计误差和将收敛到原点附近的微小邻域.
证选择Lyapunov候选函数VL,即
证明步骤如下.
步骤1将V1对时间求导并代入式(7),可得
根据控制律式(9)和自适应律式(10)-(11),式(22)可化简为
步骤2将V2对时间求导得
步骤3将V3对时间求导得
步骤4由式(18)(27)-(29)可知,VL对时间的导数满足
将式(30)中的事件触发误差项γi(t)合并整理可得
代入事件触发误差条件式(14)到式(31)中,合并同类项整理得
根据式(18)-(21)可知,式(33)中:
根据式(6),可直接得到e1i有界且满足
3.4 Zeno现象分析
因为在有限的时间内USV之间的信息交互频率是有限的,所以论述上述控制算法不会发生Zeno行为.对于第i个USV,定义为任意两个连续触发事件之间的时间间隔.随后,通过证明T>0来说明系统不会产生Zeno现象.
Zeno现象是指控制行为在有限时间内被无限次触发的现象.Zeno现象的发生会使对应的控制行为无法执行,甚至会引起系统不稳定.要证明不存在Zeno现象,只需要证明触发时间间隔存在某个大于零的下界,即存在一个正常数Γ1使得对于∀k=0,1,2,···,n成立.
定理2在本文设计控制算法的作用下,USV协同系统无Zeno现象且事件触发时间间隔下界为正常数.
证根据式(35)可知,滑模变量Si可以收敛至以下区域C≜∆,其中
根据事件触发条件式(14)和式(38)-(39)可知
因此,事件触发时间间隔严格大于零.在所提出的事件触发编队控制器的作用下,闭环系统不表现出Zeno行为.
证毕.
4 仿真结果
本节给出了多USV协同系统所设计控制算法作用下的仿真结果,说明了控制算法的有效性.编队系统中有3个跟随者和1个虚拟领导者,相应的通信邻接矩阵为
USV模型的质量为23.8 kg,长度为1.255 m,宽度为0.29 m.USV模型参数如表1所示[15].虚拟领导者的期望轨迹、初始状态向量和期望队形如表2所示.根据定理1,所有的跟随者都将跟踪虚拟领导者且构成预设队形.为了达到满意的控制性能,控制器和事件触发函数的参数选择如表3所示.
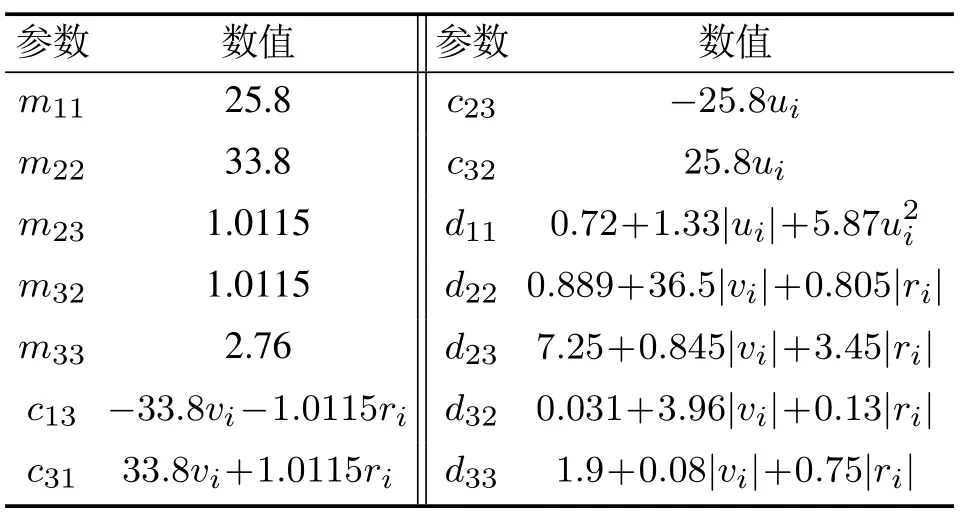
表1 USV模型参数Table 1 The model parameters of USV
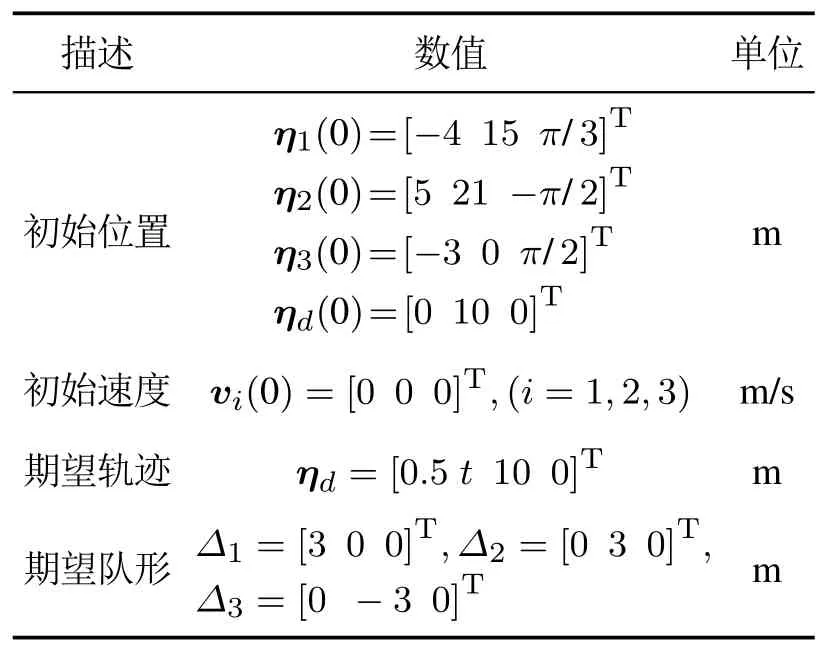
表2 初始值和期望编队配置Table 2 The initial and desired formation configuration
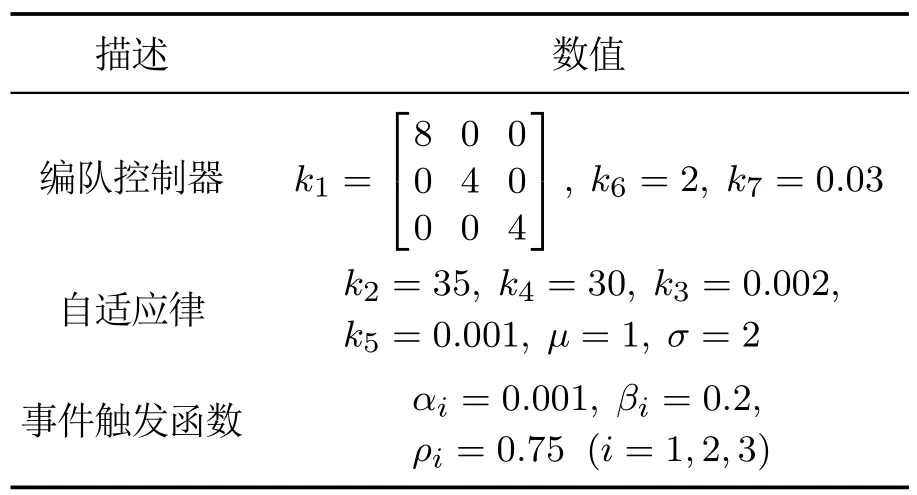
表3 控制器和事件触发函数参数配置Table 3 The parameters in controller and event-triggered function
此外,为了更好地说明所提控制器的鲁棒性.风、浪和洋流等引起的外部干扰设置如下:
详细的数值仿真结果如图2-7所示.
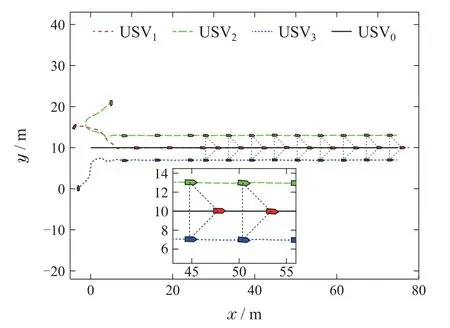
图2 编队系统二维轨迹图Fig.2 Formation trajectories of USV
图2为编队系统在二维平面上的跟踪轨迹图.其中,3个跟随者能够在保持等腰三角形队形的情况下准确跟踪虚拟领导者.图3给出了每个USV位置跟踪误差的时间响应曲线.从图中可知,即使在80 s时加入时变外部干扰,位置跟踪误差依然可以收敛至原点附近.控制输入信号如图4所示.观察图4可知,跟随者的控制输入信号在系统稳定后稳定于常值.图5描述了动态变量ξi(t)的时间响应曲线.从图中可知,ξi(t)总是非负的,并最终收敛于零.
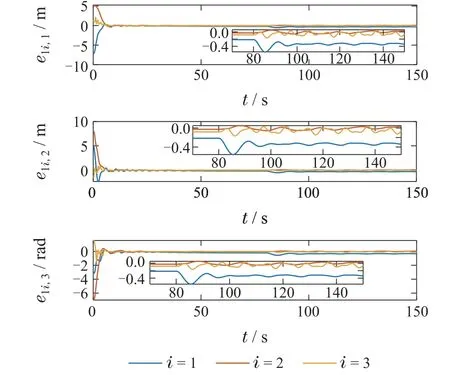
图3 编队系统位置跟踪误差Fig.3 Trajectory tracking errors of USV
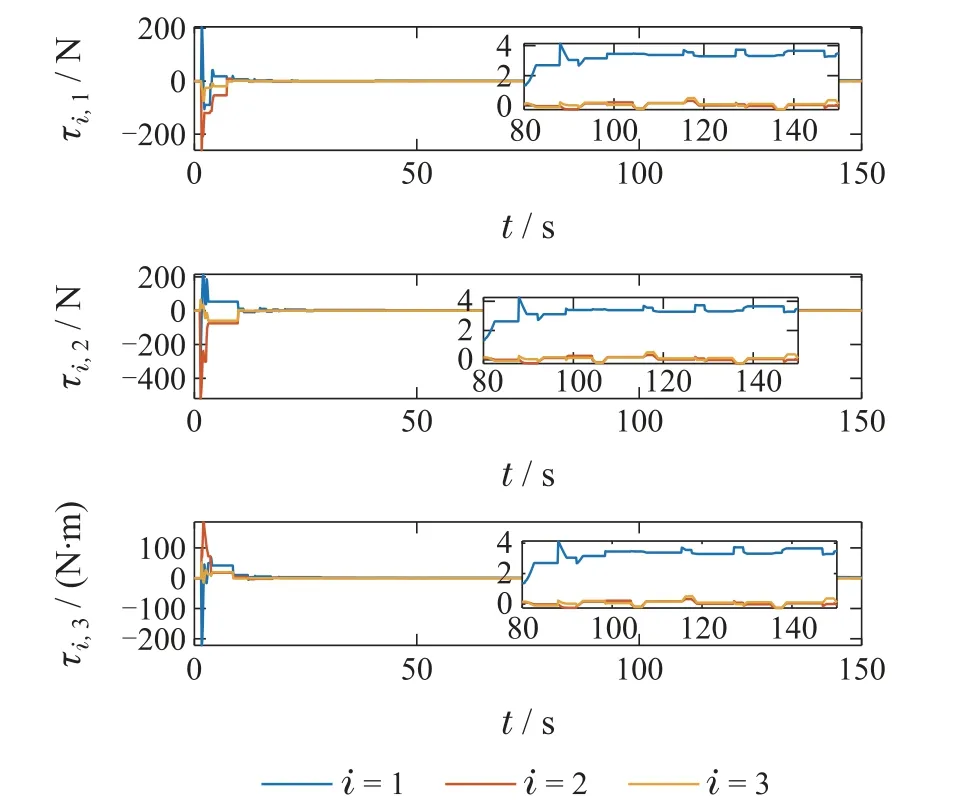
图4 编队系统执行器控制输入Fig.4 Control input of USV
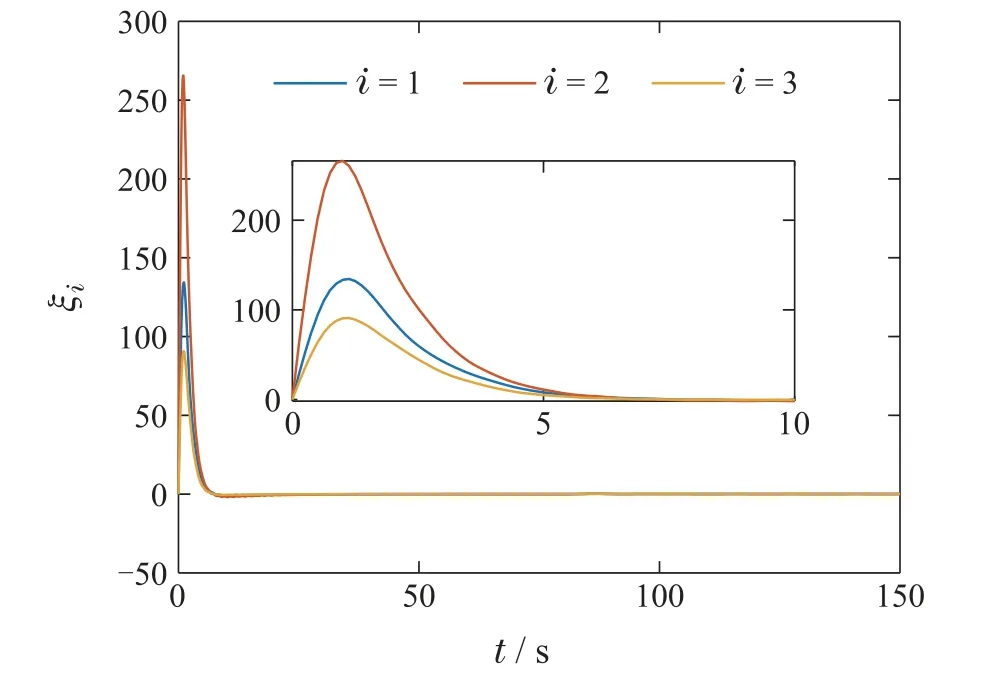
图5 动态变量ξi(t)Fig.5 The dynamic variable of ξi(t)
图6为3个USV的触发时间间隔统计图.通过计算可得,动态事件触发平均时间间隔为0.8 s,由图6可知,最大触发时间间隔为控制系统稳定到加入外部干扰之间的仿真时间,在最大触发时间间隔前由于需要不断更新控制协议使编队系统稳定,加入干扰后需要更新控制协议克服扰动,因此在这两个时间段的触发频率比较频繁.
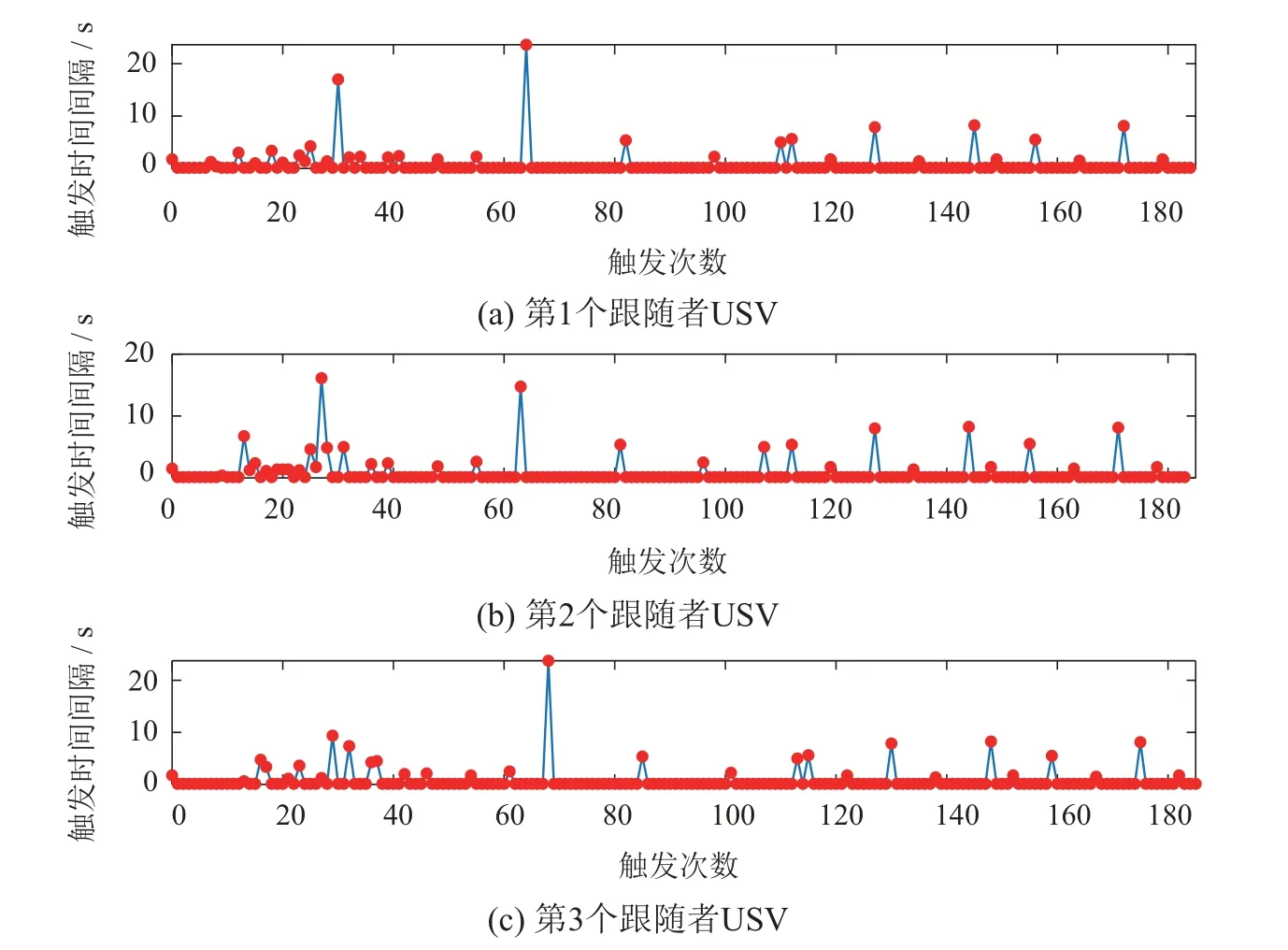
图6 动态事件触发条件下3个跟随USV的触发次数和触发时间间隔Fig.6 Trigger numbers and Trigger interval of three USV under dynamic event-triggering condition
图7 为USV 之间通信传输数据大小统计图.在数值模拟中,模拟时间选择为150 s,采样时间为0.125 s.假设每个数据的存储大小为4字节,那么在现有的连续时间触发控制方案中[18],每个USV 在仿真时间内通过通信信道发送的数据大小高达38400 字节,而采用本文提出的动态事件触发控制方案,USV 之间发送的数据大小仅为5920,5890,6020 字节.与时间触发控制方案相比,通信数据分别减少84.6%,84.7%和84.3%.
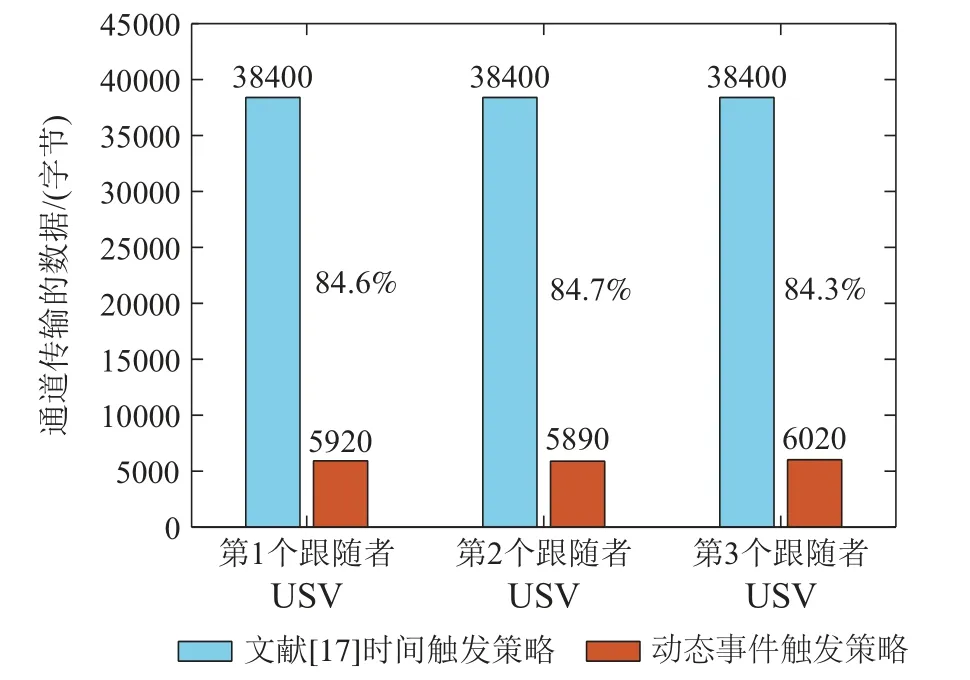
图7 USV之间通信传输数据大小Fig.7 Date size of communication transmission among USV
5 结论
本文针对通信受限的无人艇协同跟踪控制问题,提出了一种非周期性的动态事件触发信息传输策略,使每个USV可以间歇性向其邻居发送信息,从而避免了USV之间频繁的信息通讯,在保证系统收敛时间以及控制性能的前提下,动态事件触发策略能够更大的增加触发时间间隔,从而更有效的降低了通信资源消耗.在此基础上,结合滑模控制策略与自适应控制方法,本文提出了一种不需要通信网络全局信息的控制方案.最后,仿真结果验证了编队控制器的有效性.未来,笔者将重点研究最小时间间隔的事件触发控制问题,使得控制系统能够在保证瞬态以及稳态性能的同时,更有效的节省通信资源.
猜你喜欢
军事文摘(2023年5期)2023-03-27 08:56:26
数学小灵通(1-2年级)(2020年11期)2020-12-28 00:41:14
小学生学习指导(低年级)(2019年3期)2019-04-22 03:34:44
北京航空航天大学学报(2017年3期)2017-11-23 05:14:41
中国广播(2017年9期)2017-09-30 21:05:19
—— 瓮福集团PPA项目成为搅动市场的“鲶鱼”
当代贵州(2017年24期)2017-06-15 17:47:35
诗潮(2017年5期)2017-06-01 11:29:51
中南财经政法大学学报(2015年5期)2015-04-07 03:43:24
海军航空大学学报(2015年4期)2015-02-27 13:45:56
读写算·小学低年级(2014年4期)2014-07-24 22:42:55